基于STM32 的智能交通燈系統設計
2022-08-09 09:27:44韓旭東韓樂樂林邦演蔡瑞紅王淇任鄺川明
時代汽車 2022年16期
韓旭東 韓樂樂 林邦演 蔡瑞紅 王淇任 鄺川明
廣州城市理工學院 廣東省廣州市 510800
科學發展促使著人們生活水平的提高,也使得私家汽車成為習以為常的代步工具,隨著人們汽車持有量日益提高,相應的導致交通壓力也日益增長,大量的汽車在交通道路上行駛所帶來的交通擁堵問題也日益突顯,并且由于每時每刻交通路口上各個方向的車數量是實時變化的,很多時候會出現這樣一種情況,在十字路口上某個路口車輛會很多而某個路口的車輛又很少,而路口的交通信號燈通行時長都是固定的,不論這個路口車流量多少,都是按照程序運行。這就必然會導致道路通行的效率變低,特別是在上班和下班的時段,如果堵塞嚴重還會影響城市的交通網絡。所以提高路口的通行效率的需求逐漸增長。目前很多專業人士已經對智能交通燈系統的設計進行研究,但是目前絕大部分研究在統計車流量時都是采用紅外技術模塊來對通過的車輛進行統計的。這樣的方法是會有部分誤差的,因為測量點與停止線有一段距離,所以這種理論統計的車流量方法不能實時得到真正處于路口等待的車數目。所以設計一款可以實時對等待車輛進行精準計數然后再使用擁有特殊算法及其控制能力的智能交通燈對各個道路的紅綠燈等待或者通行的時長進行優化調控,這樣的智能交通燈控制系統才是未來所需,我們的研究就是基于這樣的想法進行智能交通燈控制系統的設計,這不僅僅是我們的想法也是對于交通管控以及優化城市交通網絡勢在必行的必然結果。
研究智能交通系統首先需要對智能交通網絡進行初步了解,還需要知道紅綠燈的運行邏輯。在了解了以上內容之后,首先我們需要從根本上出發,智能交通系統的本質是一種可以緩解交通壓力、使十字路口通行效率最大化的智能交通系統。
最早的智能交通系統起源于美國,21世紀初美國即設計出了許多關于ITS的發展方案。許多年的發展之后,美國的智能交通控制率已大于85%,大大領先于世界上其他國家。
歐洲與日本限于領土面積的有限的問題,人口密度大、汽車普及率高、汽車密度大的情況導致其交通壓力甚大,因此智能紅綠燈系統亦應運而生的較早。目前,歐洲各國已計劃通過對不同國之間現有的信息系統和通信設備的繼承,融合各個國家的道路交通基礎措施,從而實現了歐洲國家的智能交通互聯。其他國家的智能交通也在這個時間段逐漸噴涌出來,關于這方面的研究,目前已經得到一些初步的方案,我們的研究也是正式從這些方案中得到的啟發的。
1 系統設計
1.1 紅外檢測裝置
通過對紅外障礙探測技術對正在等待紅燈的汽車數量進行計數,將紅外對管安裝在道路中央,如圖1所示。將紅外對管安裝在道路中央,其內部如圖1所示。紅外對管用紅外光識別道路上是否有汽車,如果道路上有汽車停留那么紅外對管發射的信號反射信號就會被接收,用這種方法可以檢測是否有汽車等待紅綠燈。圖2左方是單行的車道,圖中的球代表安裝紅外對管的地方,在各個車道上安裝紅外對管,同時相鄰紅外對管之間保持一個車位,以確保車輛被紅外對管準確識別到。

圖1 紅外對管安裝在道路中央示意圖
1.2 模塊的工作流程
通過檢測四個路口實時車輛,把檢測到的各個路口車輛等待數計入單片機進行算法分析,然后對于各個路口的車輛數進行紅綠燈的時間分配。車輛數量較多的路口所需分配的通行時間更長,但是這個更多的時間也需要控制,不能無限制的給予車輛等待數最多的路口通行太久。所以需要特定的算法以及對人們進行實際的調研進行合理的時間分配。
1.3 單片機應用系統
采用單片機為系統的應用裝置,以單片機為控制系統對智能紅綠燈系統進行分析控制。采用STM32的高性能芯片進行檢測控制,使得智能交通燈系統運行的更為流暢。
如圖2所示,采取Proteus軟件進行單片機的硬件電路設計,電源回路部分,首先讓單片機vcc引腳連接電源,vss接地,運用單片機時鐘電路會發出脈沖信號對系統內部計時進行校準,其中單片機內部時鐘電路由管腳 XTAL2 以及管腳 XTAL1引出,然后與外圍電路鏈接,芯片選取晶振頻率為12 MHz。從頭開始編輯設計電路系統需要先完成撫慰電路系統設計。復位電路的設計:復位電路由9管腳引出與電容、電源、按鈕和電阻構成,可實現上電復位和手動復位。
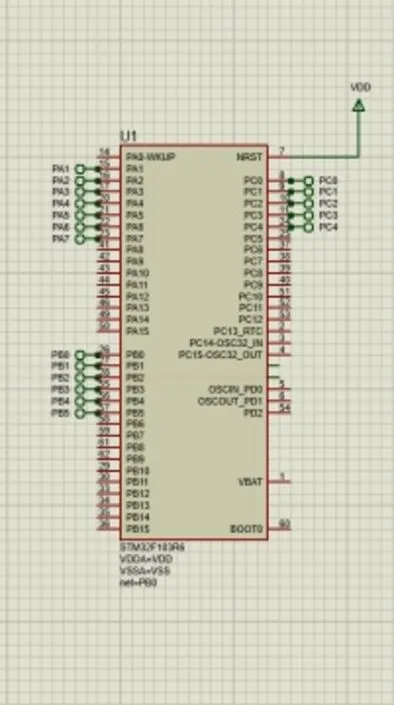
圖2 單片機的硬件電路
1.4 智能交通燈控制系統
智能交通燈控制系統主要由道路各個方向的紅綠燈以及各個紅綠燈的電源組成,由此來模擬十字路口的信號燈,以圖3所示,D6東西向綠燈,D5東西向黃燈引腳標簽,D4代表東西向綠燈引腳標簽,同理其他方位的標簽代表著各個方向的紅綠燈,這兩組標簽對應單片機PB口的6個引腳,可以通過改變PB的對LED燈進行實時控制。
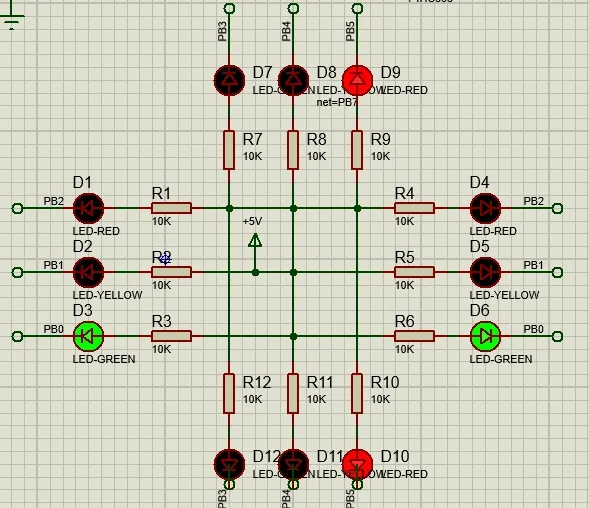
圖3 智能交通燈模擬示意圖
1.5 時間顯示模塊
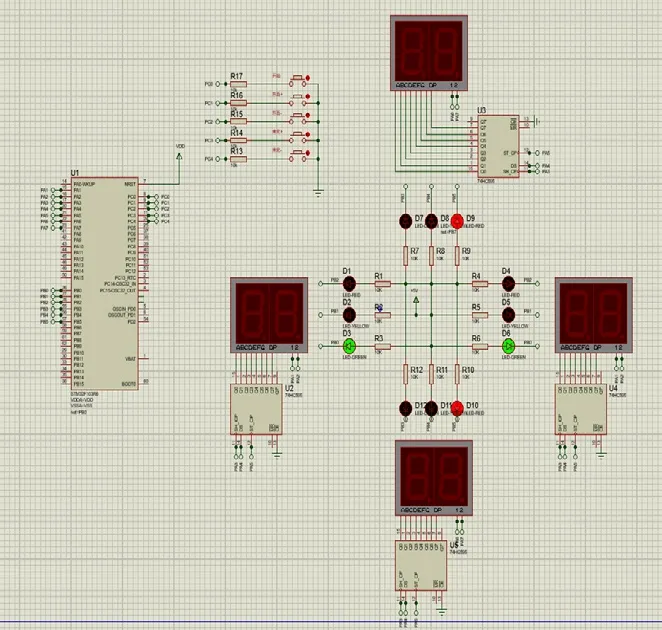
現實里真實的道路系統需要有倒計時顯示才能讓駕駛員知道自己需要等待的時長,所以設計一個倒計時顯示電路用來顯示所需等待的時長,用數字顯示芯片74HC595連接電阻及其數碼管作為等待時長顯示屏,數碼管的段控端連接總線,數碼管A-G引腳分別對應單片機上的PA0-PA7引腳和排阻構成的電路使單片機實現對數碼管的段控。數碼管的位選端通過芯片74HC595的引腳與單片機的 PB口連接,使單片機實現對數碼管的位控。
1.6 紅綠燈系統檢測
紅綠燈系統檢測方法:首先讓東西方向的紅綠燈綠燈一定時間,南北方向紅綠燈紅燈一定時間。測試結果以東西方向為標準,進行多次測試然后每一次都以上一次測試結果為基礎。第一次測試,東西方向通過20輛車,東西通行變為30秒,南北紅燈35秒;第二次測試再改變數據改變成東西向通過25輛車,東西通行36秒,南北等待40秒;再進行新的測試,東西向道路只放置個位數的汽車等待,東西通行25秒,南北等待30秒;第四次測試,東西向通過10輛車,東西通行20秒,南北等待25秒。以此進行的測試結果可以一定程度的對紅綠燈系統進行檢測,可以判斷系統是否可根據車流量智能調節交通燈各個方向道路的紅綠燈時長。
1.7 硬件電路總體設計
硬件電路總體設計由四部分構成:控制芯片、模擬交通燈、按鍵和顯示屏組成。總體系統由STM32單片機對模擬的交通燈進行控制模擬,各個方向的等待時間顯示在各個方向的顯示屏上。目的是方便實際實驗和調試。具體硬件設計如下所示。
2 軟件系統設計
2.1 主程序流程圖
首先對各個元器件和系統進行初始化,主程序運行流程如圖四控制東西的LED燈使其變綠,南北的LED燈變紅,進入圖五計時器子程序,并且給P0和P2輸入十位與個位的數字型碼,接下來進行按鍵掃描,對需要的按鍵進行配置,按鍵消抖等一系列對按鍵初始化的過程,有按鍵按下這里沒有給確切的按鍵,以便于后期的設置與改動,假設這里所觸發的按鍵為KEY0,按鍵初始化狀態時為低電平,按一次按鍵狀態轉為高電平,所以當KEY0=1時進入YES判斷環節,環節調用鍵盤(按鍵)子程序如圖六,KEY0=0時進入NO判斷環節,再次控制東西的LED燈使其變綠,南北的LED燈變紅,同時讓黃燈閃爍(這里的黃燈閃爍可以看做即將跳入紅燈時的黃燈閃爍,也不完全是同時閃爍),顯示子程序和前面提到的一樣,是將數字型碼輸入到對應的共陽極的2位數碼管上以實現精確的計時,再次跳入鍵盤掃描,緊接著跳入條件判斷,這時沒有else語句,
只是滿足KEY0=1時,直接調用鍵盤子程序(按鍵子程序),接著就是順序執行,控制東西的LED燈變紅,南北的LED燈變綠,末尾加上return,放回主函數初始位置,及完成了本次程序的運行。如果要進行計時器中斷,則進行中斷子程序流程如圖7。

圖4 主程序框圖

圖5 計時器子程序流程圖

圖7 計時器中斷子程序流程圖
3 結語
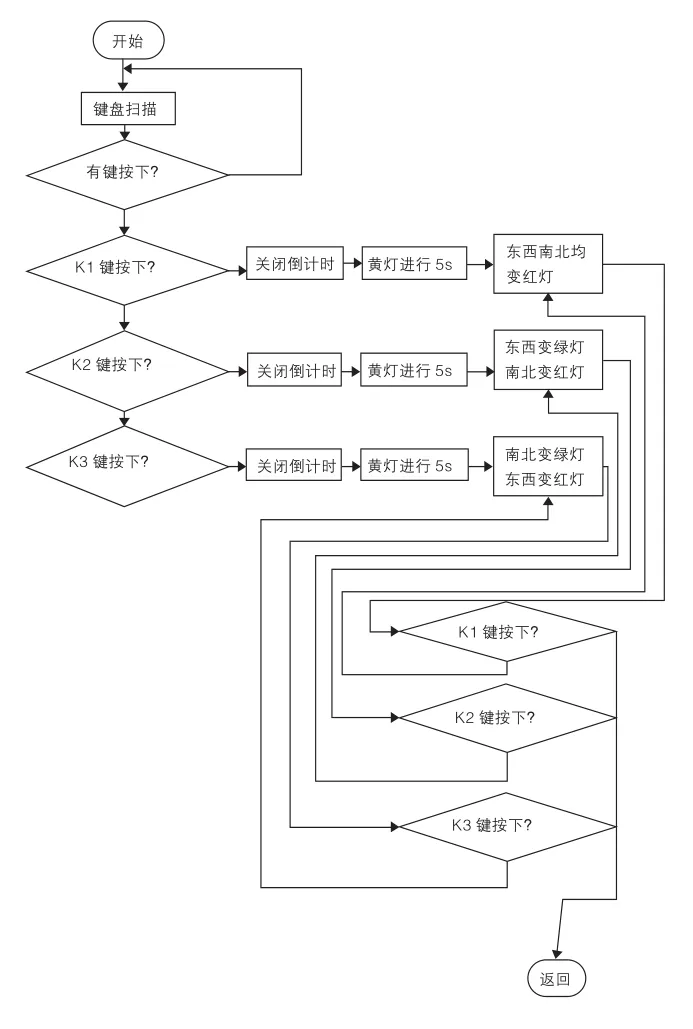
圖6 按鍵子程序流程圖
智能交通燈的作用簡言之就是將各個不同領域的知識結合起來從而加強車輛與道路的關系,使三者之間聯系,運用信息技術、電子技術、傳感器技術、系統工程技術等公路運輸系統從而建立起快捷方便安全、準確、高效的城市交通系統,這就是智能交通燈所研究的最終目的。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
