工業機器人機械零位的敏感性分析與實驗研究*
2022-08-09 08:14:32占加林張作勝周福靜
南方農機 2022年15期
占加林 , 張作勝 , 楊 兵 , 周福靜
(安徽職業技術學院機械工程學院,安徽 合肥 230009)
0 引言
近年來,以工業機器人為代表的智能制造行業快速發展,其主要具備離線復雜任務編程、高精度、高集成化等特點。隨著工業機器人的應用越來越廣泛,工業機器人面臨的絕對定位精度較低和標定不準等問題愈發嚴重[1-2],所以非常有必要對機器人精度展開深入研究。本文則是在標定之前,從機械零位的角度分析其對機器人精度和標定工作的影響。
目前,國內外關于機器人機械零位補償應用的研究較多,這也是一項必須要完成的常規工作,但對于回零方法的研究較少[3-4]。機器人零位標定的思路主要有兩種,一種是將零位補償放進機器人標定中研究,直接通過算法辨識的方法取得回零值,此方法操作簡單,標定后的效果較好,但不利于后期機器人結構的優化設計,也無法區分誤差源來自于零位不準還是機器人實際結構參數[5];另一種零位標定方法是采用角度傳感器等檢測設備來實現,能夠獲得較高的精度,但操作過程繁復,設備附加成本較高[6]。
針對現有研究過程中存在的一些問題,本文提出將肉眼觀察、塞尺觸碰和參數辨識三者結合的全新回零方法,實現多梯度的零位補償,保證研究的可能性和應用的便捷性。首先建立機器人零位誤差空間模型,通過MATLAB軟件仿真分析末端位置誤差敏感性,再搭建機械零位實驗平臺來實現機器人每個關節的零位標定。
1 機器人零位標定原理與誤差模型
1.1 機器人零位標定原理
當機器人出現外部碰撞、斷電等各類突發情況時,開機后的機械零位會丟失,導致機器人絕對定位精度降低[7]。目前市面上一種常規的自動回零裝置的工作原理,如圖1所示。當機器人移動到預標定位置點,機械零點同步達到顯示刻度槽最低點,EMT工具可以自動找到零點并記錄下來[8]。
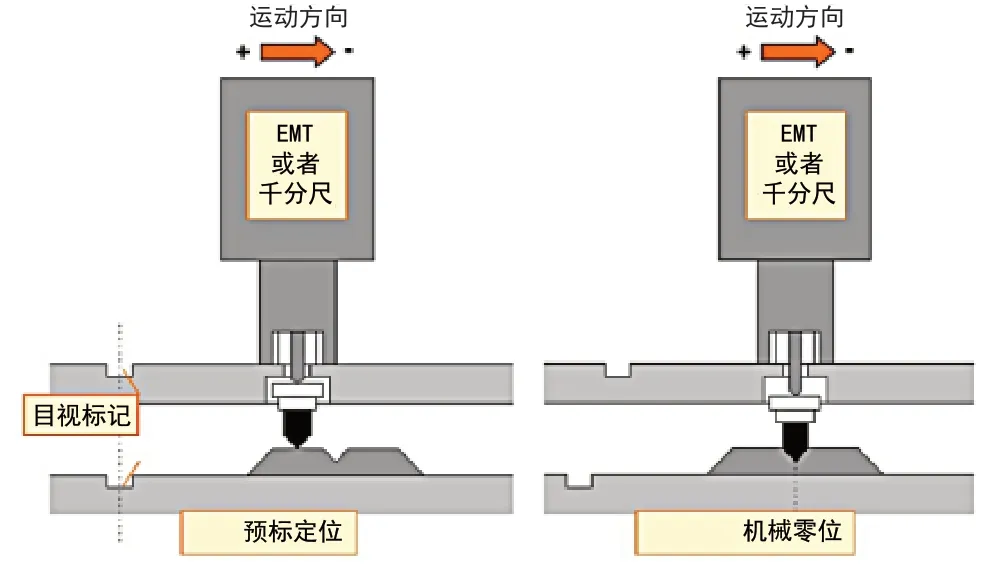
圖1 機器人的機械零位預標定原理
1.2 機器人零位誤差模型
由于零位是能夠在機器人控制程序中在線補償的,為了更好地認識零位誤差規律且后期能有效地開展機器人標定工作,本節采用幾何法。通過分析關節轉角與絕對定位誤差二者的線性關系,建立機器人零位誤差模型,進而探究機械零位對其末端位置的影響。
J1的關節轉角與絕對定位誤差的關系:

J1關節轉角誤差影響X、Y兩個方向位置,如圖2所示。
J2的關節轉角與絕對定位誤差的關系:

J2關節轉角誤差影響X、Z兩個方向,如圖2所示。
J3的關節轉角與絕對定位誤差的關系:
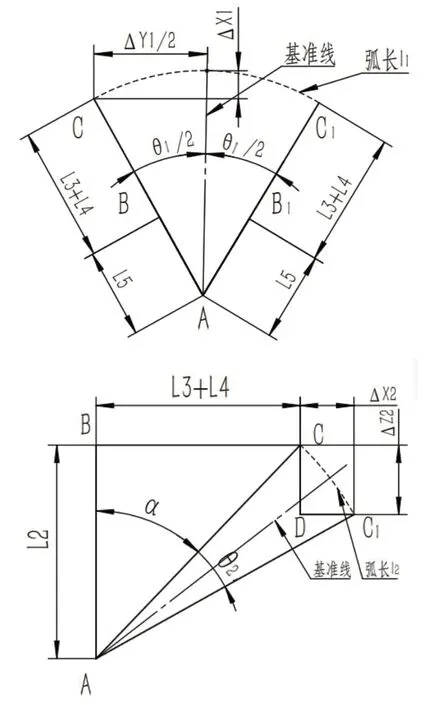
圖2 J1、J2關節轉角與絕對定位誤差
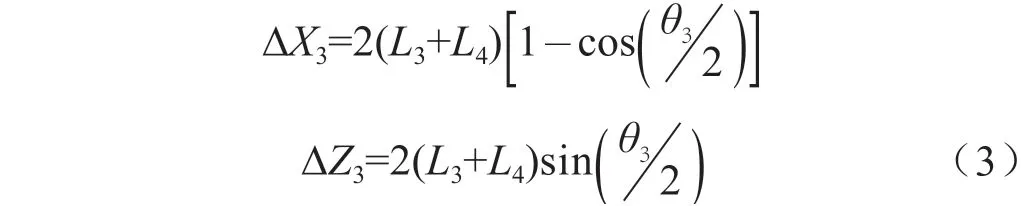
J3關節轉角誤差影響X、Z兩個方向,如圖3所示。
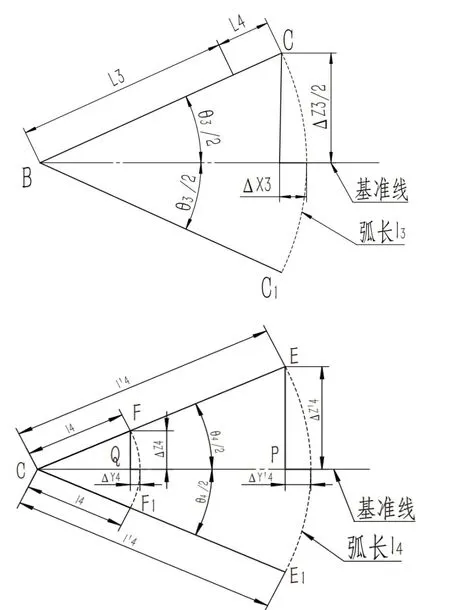
圖3 J3、J4關節轉角與絕對定位誤差
J4關節不改變末端法蘭原點坐標值,當在末端添加工具或負載時,會在X、Z兩個方向影響機器人定位精度。
J4的關節轉角與絕對定位誤差的關系:

由ΔCPE與ΔCQF相似,得:

J4關節轉角誤差影響Y、Z兩個方向,如圖3所示。
J5的關節轉角與絕對定位誤差的關系:

J5關節轉角誤差影響X、Z兩個方向,如圖4所示。
J6的關節轉角與絕對定位誤差的關系:

由ΔOP1G與ΔOQ1G相似,得:

J6關節轉角誤差影響Y、Z兩個方向,如圖4所示。
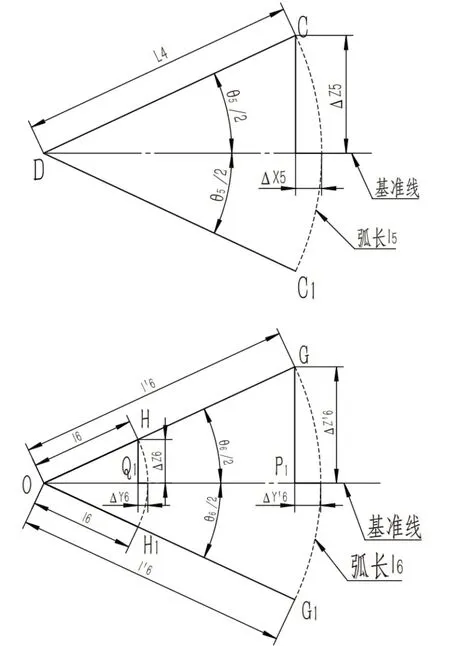
圖4 J5、J6關節轉角與絕對定位誤差
機器人關節偏差會形成誤差圓弧,因為零位引起的誤差圓弧弧長一般較短,所以將圓弧弧長按照線段來處理。如圖5所示,陰影區域顯示的是不可辨識區域。由研究可知,正常情況下人眼能分辨的尺寸誤差大約在0.3 mm[9],建立任意半徑下關節半徑-弧長的關系式:
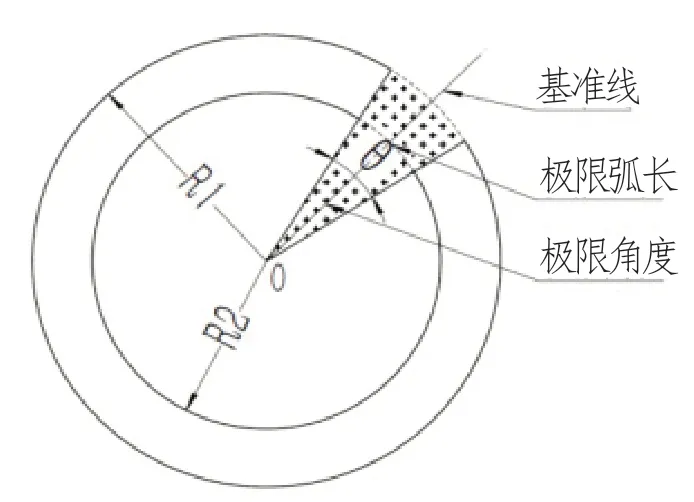
圖5 辨識區域示意圖

式中,R為旋轉半徑;l為肉眼不可分辨的極限弧長;θ為肉眼不可分辨的極限關節轉角。
本文參照LR20機器人D-H模型,分析在人眼無法辨識的情況,每個軸的關節轉角偏差對末端產生的最大誤差,如表1所示。

表1 機器人關節轉角與末端位置誤差
1.3 機器人機械零位誤差空間仿真
在機械零位的影響下,為了更清楚、直接地分析機器人末端的整體誤差范圍,本文在Simulink的simMechanism-first generation模塊中建立機器人位置誤差空間模型,輸入信號包括:幅值iθ,周期,采樣頻率[10-11]。以LR20機器人為例,首先定義6個關節的旋轉方向,再通過連桿將關節聯系成為整體,其中機器人底座設為固定,最后利用激勵器輸出X、Y、Z三個方向的位置誤差值,得到機器人整體建模的模擬結構圖,如圖6所示。
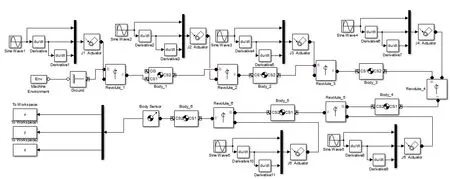
圖6 LR20機器人模擬結構圖
每個關節采用聯動仿真,輸入正弦信號能夠得到末端X、Y、Z三個方向的偏差規律以及整體誤差空間圖,如圖7所示。
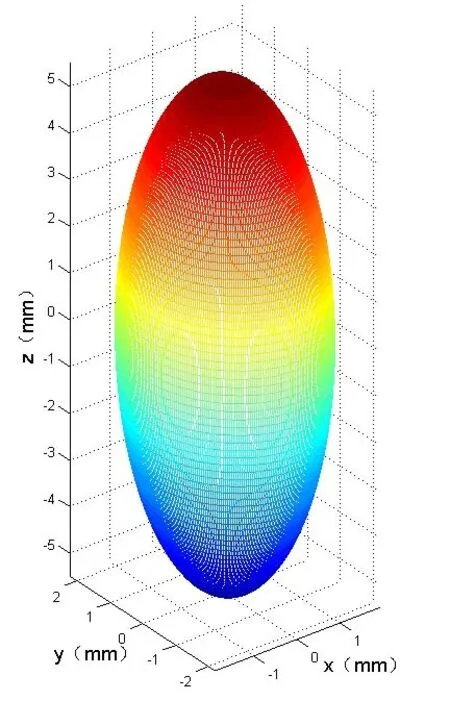
圖7 LR20機器人整體誤差空間圖
2 機器人關節轉角與末端位置誤差關系的實驗
2.1 機器人機械零位測試實驗平臺
機器人的零位誤差補償一般是在標定實驗開展之前完成,從實驗的角度去分析單軸回零運動對末端定位精度的敏感性,能夠在辨識D-H參數之前優化機械零位,同時可以驗證上述的理論分析與仿真結果。機器人機械零位誤差測試平臺如圖8所示。

圖8 機器人機械零位誤差測試平臺
實驗中利用激光跟蹤儀和配套Spatial Analyzer軟件獲取機器人末端點坐標,通過肉眼觀察、塞尺觸碰和參數辨識三種方式去校準機械零位,并且將機器人保持在初始程序位置。在實驗過程中機器人單軸轉動,確保其他關節不發生改變,按照最大速度、循環50次取均值的方式運行,最后記錄下三種方式回零時產生的位置誤差。塞尺對標法具體如圖9所示。

圖9 塞尺對標法
2.2 機器人零位敏感度分析與誤差補償
第一次重啟機器人并回歸零位時,通過肉眼觀察的方式去校準零位;第二次利用圖9中塞尺卡住機械零位;第三次進行關節角度辨識。表2記錄了三次回零時的機械零位校準數值。機器人控制器設置的初始轉角為0°、0°、0°、0°、0°、90°。
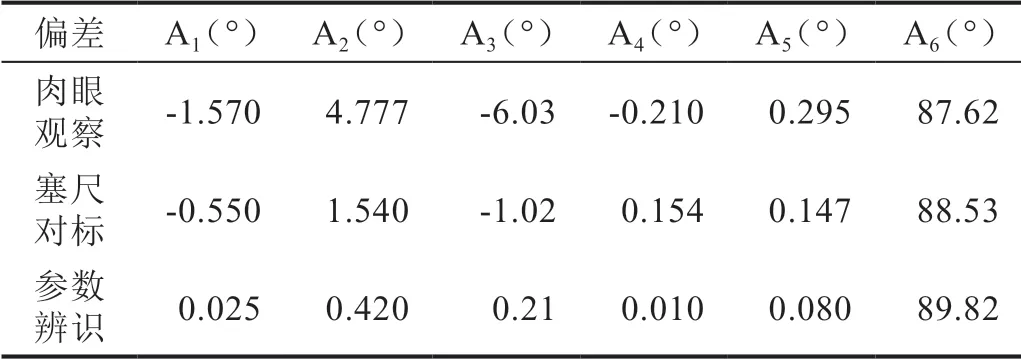
表2 三種不同方式下各個關節機械零位修正值
由表2可知,三種標定方式下各關節轉角機械零位修正值在依次減小。圖10也可以明顯看出伴隨機器人的三次回零,機器人末端絕對定位精度得到很明顯的提高。在三次回零后分別進行20點的驗證實驗,結果發現絕對位置平均誤差改善了52%、88%、95%以上。

圖10 機械零位標定后的末端位置誤差規律
3 結束語
機器人零位標定可以直接提高機器人絕對定位精度,但無法做到精準區分誤差源,工具輔助回零又操作煩瑣。本文則采用多梯度的測試方式,規避存在的耦合性因素,進行了相關的理論推導、模型仿真和實驗研究。
1)分析機器人零位標定原理,通過幾何分析法,提出了機器人誤差空間模型,并搭建了基于MATLAB-Simulink模塊的六關節聯動機器人零位敏感度仿真。仿真結果表明,在無系統誤差的情況下,將形成一個橢圓體的誤差空間,其中Z方向產生的定位誤差最大達到4.75 mm。采用常規回零的方式后,對末端位置產生的影響仍然非常大。
2)在搭建的機器人零位標定實驗平臺上,運用肉眼觀察、塞尺觸碰和參數辨識三種方式逐級開展測試,零位的修正值得到大幅度提高。通過20點的驗證實驗,再次印證了多梯度零位標定的有效性。下一步研究計劃將自動回零工具和在線辨識技術集成到一起,進一步規避每次開機后的零位誤差。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
發明與創新(2016年38期)2016-08-22 03:02:52
科技知識動漫(2016年8期)2016-07-29 20:40:09
太空探索(2016年5期)2016-07-12 15:17:55