工業機器人工件坐標系激光標定研究分析*
2022-08-09 08:14:54沈濤,王強,郭超
南方農機 2022年15期
沈 濤 , 王 強 , 郭 超
(宜賓職業技術學院智能制造學院,四川 宜賓 644000)
1 工業機器人工件坐標系標定簡介
工業機器人控制系統擁有基坐標系、工件坐標系、工具坐標系[1]。按照不同的加工產品特性,可選擇適合產品的坐標系進行產品軌跡規劃,合適的坐標系對工業機器人加工產品的運行軌跡有巨大的幫助[2]。在應用工業機器人坐標系時,因加工產品夾緊位置各不相同、加工的工具形式多樣,所以工具坐標系和工件坐標系的原點位置均不同,由此工業機器人坐標系的標定就顯得尤為重要。本文針對工業機器人工件坐標系的標定進行分析研究[3]。
在工業機器人系統中,工件由于安裝的位置不同,其坐標系原點位置也不盡相同。由于工業機器人基坐標系原點固定不變,因此可將其作為參考點明確工件坐標系的原點位置,從而可將工件建立在工件坐標系中進行工業機器人軌跡規劃。工業機器人坐標系間的相互關系和位置如圖1所示。

圖1 工業機器人坐標系示意圖
目前,工業機器人工件坐標系標定主要分為接觸式標定和非接觸式標定兩種,本文中的工件坐標系激光標定是一種典型的非接觸式標定[4]。
2 工件坐標系標定原理分析
在工業機器人運行軌跡規劃過程中,工件坐標系標定是最常用的坐標系標定之一,工件坐標系是建立在以加工對象即工件為坐標系原點上的坐標系。以工件表面任一點作為加工坐標系原點,有利于在工件形狀或工件擺放位置不規則的情況下,工業機器人末端執行器能夠順利地進行軌跡規劃,避免工業機器人在軌跡運行的過程中出現奇點現象。
工件坐標系標定是為尋找工件位置與基坐標系之間的相對位置關系[5]。其計算方式可通過矩陣轉換實現。若矩陣變換用bTf表示,取工件坐標系中任意點p,則其在工件坐標系中的位置為:

在基坐標系中的位置:

其中,該點在基坐標系中的位置b p可以測量得出,并已知其在工件坐標系中的位置f P,因此只需列出三個等式(采集三點位置)即可列出bTf矩陣[1],而激光標定方式為常見的非接觸式獲取以上工件任意點位置坐標的手段。
3 工業機器人激光標定
由第二節可知,工業機器人激光標定的關鍵在于明確工件標定點p在工件坐標系中的位置f P和在基坐標系中的位置b p的坐標值。本研究中,將激光發射器安裝于工業機器人末端執行器上,激光發射器可隨工業機器人姿態的變化而改變位置,可發射集束紅外線光源。集束紅外線光源投射到工件表面后會在其表面反射光線,由安裝在激光發射器部位的高精傳感器接收并產生電壓信號反饋至工業機器人總控系統,從而明確工件在工業機器人中的位置。
在本標定中,激光發射器固定在工業機器人末端執行器上,因此,激光發射器的坐標位置與工業機器人工具坐標系的位置相對固定,其隨工業機器人位姿的改變而改變,反饋的集束光因激光發射器的位置改變而轉化的電壓信號不同,由不同的電壓信號可確定激光發射器與工件的相對位置[6]。激光發射器在工業機器人工具坐標系的相對位置可用下式表示:

式中,xOE、yOE、zOE是激光發射器在工業機器人工具坐標系中的位置,即集束光源坐標值;mOE、nOE、pOE是激光發射器光源方向矢量,由于激光發射器位置相對不變,因此激光發射器光源方向矢量相同。因此,可通過正運動學分析獲取工業機器人激光發射器在工業機器人基坐標系中的位置[7]:

其中:

激光發射器集束光源直線方程為:

式中,(x,y,z)為激光發射器集束光源通過工業機器人基坐標系中固定點的坐標值,(α,β,γ)為激光發射器集束光通過工業機器人基坐標系中固定點的方向矢量[6]。
工業機器人通過改變其末端執行器位姿并獲得激光發射器反饋集束光線,可得到工業機器人在這兩種情況下的關節角,并且利用正運動方程獲取激光發射器集束光源的變換矩陣,進而獲得激光發射器集束光源在工件標定點上的坐標值。
兩次集束光的交點列式為:

其中:

在求解的過程中,有可能兩次集束光不存在交點,因此,在沒有交點時可以用兩次集束光的公垂線中心點求取近似交點。
公垂線中心點:

其中:

工業機器人激光標定前,由于其末端執行器運行誤差的原因,激光點交點不一定在同一個點上,但激光標定后激光交點則可收斂為同一個交點,減小了由于工業機器人運行誤差所產生的偏差。激光交點收斂圖如圖2所示。
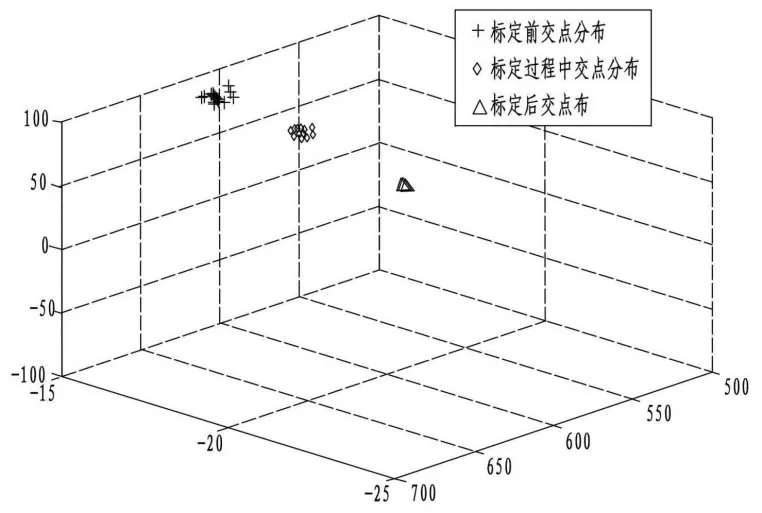
圖2 激光交點收斂圖
4 工業機器人激光標定實驗設計
當得到激光發射器在不同位置的坐標值后,只需知道工業機器人激光發射器發射的集束光在不同位置的交點即可計算出工件坐標系在工業機器人基坐標系中的相對位置,因此需計算出兩次集束光公垂線中心點的坐標值。實驗設計如下。
1)將工業機器人末端執行器變換至任意位置至少2次,使高精傳感器均能接受到集束光從工件同一位置上的反射光線并分別記錄其角度值;
2)更換工件標定點位置,重復第一步操作,工件標定點建議選取3個及其以上;
3)將獲取的角度值代入激光直線方程中,計算并得到激光發射器在工業機器人基坐標系中的坐標值,從而獲取工件標定點在工業機器人基坐標系中的變換,即可得到工業機器人工件坐標在工業機器人基坐標中的相對位置關系,即工件坐標系[7-10]。
5 總結
本文主要介紹了采用激光標定的方式標定工業機器人工件坐標系的計算方法,對其理論計算展開了詳細分析,對在工件標定過程中激光交點不在同一個點上的問題提出了解決方案,并設計出了工業機器人激光標定實驗的設計思路,為工業機器人工件坐標系標定的理論研究提供了思路。