大型風(fēng)電機(jī)組傳動(dòng)鏈地面試驗(yàn)平臺(tái)簡(jiǎn)化影響分析
2022-08-17 06:38:00胡書(shū)舉
可再生能源 2022年8期
關(guān)鍵詞:模型
宋 斌, 胡書(shū)舉
(中國(guó)科學(xué)院電工研究所, 北京 100190)
0 引言
大型風(fēng)電機(jī)組傳動(dòng)鏈主要由主軸、 齒輪箱和發(fā)電機(jī)等部件構(gòu)成,是機(jī)組的核心部分[1]。 大功率風(fēng)電機(jī)組運(yùn)行環(huán)境復(fù)雜惡劣,運(yùn)維難度大,為確保其穩(wěn)定可靠運(yùn)行, 對(duì)傳動(dòng)鏈部分的試驗(yàn)工作提出了越來(lái)越高的要求。近年來(lái),傳動(dòng)鏈地面試驗(yàn)受到國(guó)內(nèi)外學(xué)者的廣泛關(guān)注和重視,通過(guò)地面試驗(yàn),可為傳動(dòng)鏈研發(fā)設(shè)計(jì)及性能評(píng)價(jià)提供可控的試驗(yàn)環(huán)境, 可快速有效地對(duì)新技術(shù)和新產(chǎn)品進(jìn)行試驗(yàn)驗(yàn)證,降低了技術(shù)風(fēng)險(xiǎn),縮短了研發(fā)周期[2]。
與風(fēng)電場(chǎng)實(shí)際運(yùn)行的風(fēng)電機(jī)組相比, 傳動(dòng)鏈地面試驗(yàn)平臺(tái)簡(jiǎn)化了葉輪和塔架等部件, 通過(guò)增加拖動(dòng)電機(jī)和載荷加載裝置等模擬風(fēng)載荷[3],[4],其物理特性與機(jī)組不同。當(dāng)進(jìn)行地面試驗(yàn)時(shí),由于被試傳動(dòng)鏈未受到葉輪和塔架等“缺失”部件的耦合影響[5],其動(dòng)態(tài)響應(yīng)特性與實(shí)際機(jī)組傳動(dòng)鏈存在較大差異, 這可能導(dǎo)致地面試驗(yàn)結(jié)果出現(xiàn)一定偏差。因此,需要探究地面試驗(yàn)平臺(tái)在簡(jiǎn)化后對(duì)被試傳動(dòng)鏈動(dòng)態(tài)特性的影響機(jī)理, 從而為抑制簡(jiǎn)化影響的相關(guān)技術(shù)與方法提供理論支撐, 確保地面試驗(yàn)結(jié)果真實(shí)可信。
近年來(lái), 研究人員針對(duì)傳動(dòng)鏈地面試驗(yàn)的研究重點(diǎn)集中在葉輪扭矩模擬技術(shù)、 五自由度非扭矩載荷模擬技術(shù)等地面試驗(yàn)工況模擬技術(shù)[6],[7],但所提出的模擬控制方法尚未全面考慮地面試驗(yàn)平臺(tái)的簡(jiǎn)化影響。 本文針對(duì)目前研究的不足, 以某10 MW 級(jí)風(fēng)電機(jī)組傳動(dòng)鏈地面試驗(yàn)平臺(tái)為研究對(duì)象, 建立了地面試驗(yàn)平臺(tái)動(dòng)力學(xué)模型及被試風(fēng)電機(jī)組聯(lián)合仿真模型, 分別對(duì)兩種典型地面試驗(yàn)工況作用下的傳動(dòng)鏈動(dòng)態(tài)特性進(jìn)行仿真, 基于仿真結(jié)果對(duì)地面試驗(yàn)簡(jiǎn)化影響機(jī)理進(jìn)行了分析。
1 傳動(dòng)鏈地面試驗(yàn)平臺(tái)及風(fēng)電機(jī)組
本文研究的傳動(dòng)鏈地面試驗(yàn)平臺(tái)如圖1 所示。 試驗(yàn)平臺(tái)功率等級(jí)為10 MW,采用雙永磁直驅(qū)電機(jī)進(jìn)行葉輪轉(zhuǎn)矩模擬加載, 配備液壓式非扭矩載荷加載裝置對(duì)葉輪五自由度非扭矩動(dòng)靜態(tài)載荷進(jìn)行模擬加載, 拖動(dòng)電機(jī)與非扭矩載荷加載裝置之間采用帶軸向位移補(bǔ)償能力的萬(wàn)向聯(lián)軸器進(jìn)行連接。 試驗(yàn)平臺(tái)上被試機(jī)組為5 MW 雙饋型機(jī)組,被試機(jī)組輸出端接入電網(wǎng)。
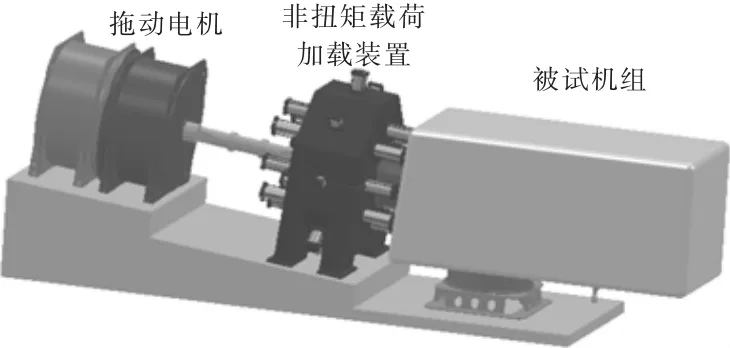
圖1 風(fēng)電機(jī)組傳動(dòng)鏈地面試驗(yàn)平臺(tái)主體結(jié)構(gòu)Fig.1 Principal structure of wind turbine drive-train ground test bench
試驗(yàn)平臺(tái)及試驗(yàn)平臺(tái)上被試機(jī)組的主要參數(shù)見(jiàn)表1,2。
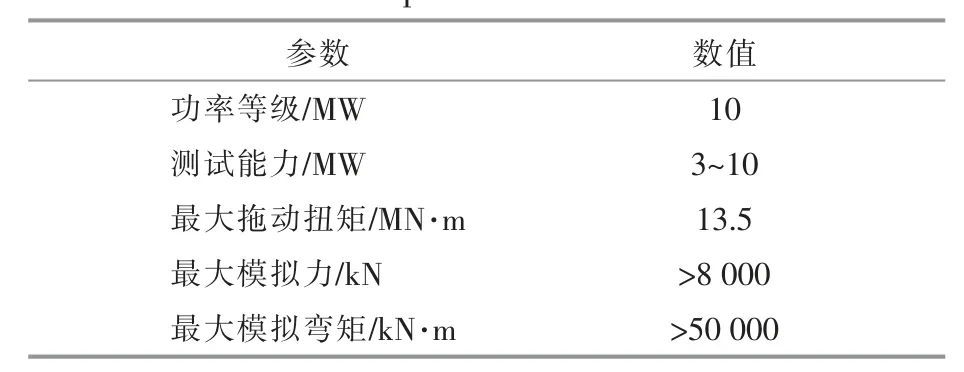
表1 試驗(yàn)平臺(tái)主要參數(shù)Table 1 Main parameters for test bench
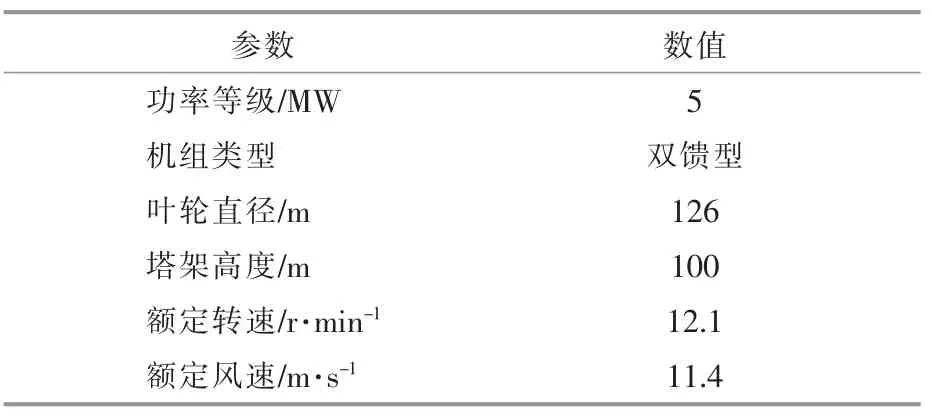
表2 被試風(fēng)電機(jī)組主要參數(shù)Table 2 Main parameters of wind turbine
2 仿真計(jì)算模型
2.1 動(dòng)力學(xué)模型
為分析試驗(yàn)平臺(tái)上傳動(dòng)鏈與真實(shí)機(jī)組傳動(dòng)鏈動(dòng)態(tài)特性差異, 本文采用多體動(dòng)力學(xué)軟件分別建立被試風(fēng)電機(jī)組整機(jī)動(dòng)力學(xué)模型和地面試驗(yàn)平臺(tái)動(dòng)力學(xué)模型。 被試風(fēng)電機(jī)組整機(jī)動(dòng)力學(xué)模型由葉輪、塔架、主軸承、齒輪箱和發(fā)電機(jī)等部件組成。對(duì)葉片和塔架部件采用分段式建模, 將葉片和塔架拉伸、 扭轉(zhuǎn)與彎曲剛度以各段之間結(jié)合面上的剛度矩陣進(jìn)行等效。 將傳動(dòng)鏈中主軸承部件以旋轉(zhuǎn)運(yùn)動(dòng)副進(jìn)行等效。分別將齒輪箱、發(fā)電機(jī)等部件以質(zhì)量塊進(jìn)行等效, 考慮傳動(dòng)鏈各連接軸和行星架等柔性部件的扭轉(zhuǎn)剛度和阻尼, 以及齒輪嚙合剛度,分別以剛度-阻尼系統(tǒng)進(jìn)行等效。
傳動(dòng)鏈地面試驗(yàn)平臺(tái)動(dòng)力學(xué)模型主要由拖動(dòng)電機(jī)、 五自由度非扭矩載荷加載裝置以及被試機(jī)組傳動(dòng)鏈部件組成。 建模時(shí)分別將各部件以質(zhì)量塊進(jìn)行等效,考慮各連接軸的扭轉(zhuǎn)剛度和阻尼,以彈簧-阻尼系統(tǒng)進(jìn)行等效。 根據(jù)試驗(yàn)平臺(tái)實(shí)際裝配與約束情況, 對(duì)拖動(dòng)電機(jī)部件采用旋轉(zhuǎn)運(yùn)動(dòng)副約束, 拖動(dòng)電機(jī)與載荷加載裝置之間采用鉸接約束與滑動(dòng)副約束, 載荷加載裝置與被試傳動(dòng)鏈之間采用固接約束。 被試傳動(dòng)鏈各部件動(dòng)力學(xué)建模方法與上述整機(jī)建模方法一致。
2.2 聯(lián)合仿真模型
將被試風(fēng)電機(jī)組動(dòng)力學(xué)模型與氣動(dòng)模型、電氣控制模型進(jìn)行聯(lián)立(圖2)。 采用美國(guó)可再生能源實(shí)驗(yàn)室開(kāi)發(fā)的開(kāi)源程序Aerodyn 基于葉素-動(dòng)量理論建立被試風(fēng)電機(jī)組氣動(dòng)模型;采用Matlab/simulink 軟件建立被試風(fēng)電機(jī)組電氣模型, 包括發(fā)電機(jī)轉(zhuǎn)矩控制模型、 變槳距控制模型及電網(wǎng)模型等。機(jī)組動(dòng)力學(xué)模型、氣動(dòng)模型及電氣控制模型之間通過(guò)變量交互形成聯(lián)合仿真模型。
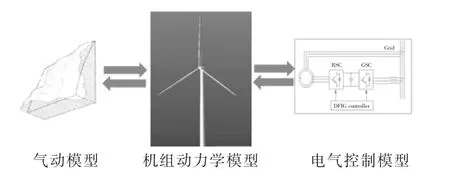
圖2 被試風(fēng)電機(jī)組聯(lián)合仿真模型Fig.2 Wind turbine co-simulation model
3 試驗(yàn)平臺(tái)與被試機(jī)組模態(tài)對(duì)比
為分析風(fēng)電機(jī)組與地面試驗(yàn)平臺(tái)動(dòng)力學(xué)特性差異機(jī)理, 首先基于風(fēng)電機(jī)組及地面試驗(yàn)平臺(tái)動(dòng)力學(xué)模型進(jìn)行額定轉(zhuǎn)速下的模態(tài)分析, 分析結(jié)果如表3 所示。
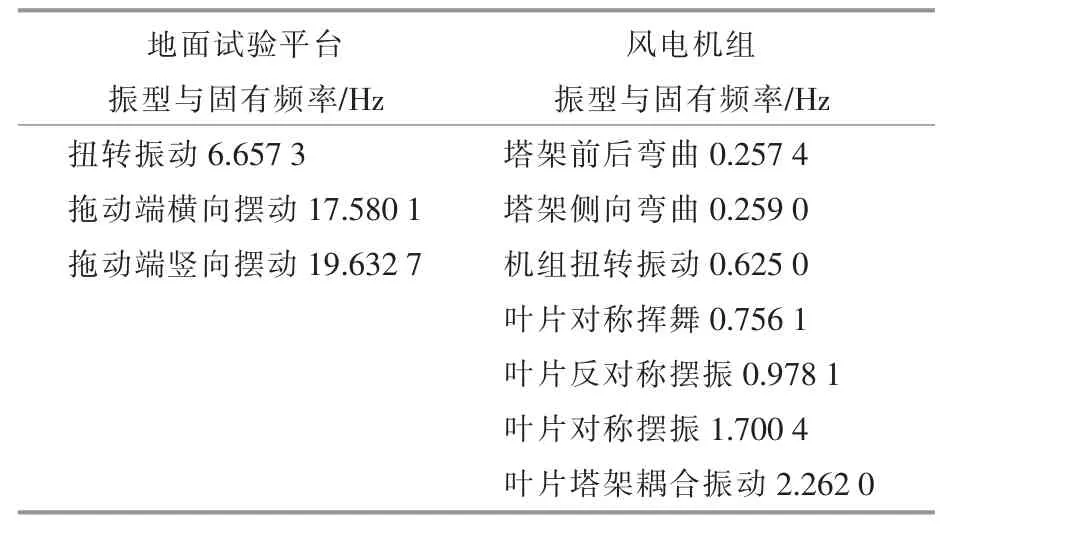
表3 地面試驗(yàn)平臺(tái)和被試風(fēng)電機(jī)組模態(tài)分析結(jié)果Table 3 Modal analysis results of ground test bench and wind turbine
對(duì)比表3 中地面試驗(yàn)平臺(tái)與機(jī)組模態(tài)分析結(jié)果發(fā)現(xiàn),地面試驗(yàn)平臺(tái)在簡(jiǎn)化葉輪和塔架部件、增加拖動(dòng)電機(jī)和載荷加載裝置后, 其模態(tài)與機(jī)組模態(tài)差異較大。 地面試驗(yàn)平臺(tái)模態(tài)振型為扭轉(zhuǎn)振動(dòng)及拖動(dòng)端擺動(dòng)振動(dòng), 其中拖動(dòng)端擺動(dòng)振動(dòng)模態(tài)阻尼比較大,振幅衰減較快,因此其主要振動(dòng)形式為扭轉(zhuǎn)振動(dòng)。
4 機(jī)組實(shí)際運(yùn)行工況下簡(jiǎn)化影響分析
傳動(dòng)鏈地面試驗(yàn)重要試驗(yàn)內(nèi)容之一是將被試機(jī)組全部或典型運(yùn)行工況在地面試驗(yàn)平臺(tái)上進(jìn)行復(fù)現(xiàn), 將其作為地面試驗(yàn)工況以測(cè)試傳動(dòng)鏈運(yùn)行性能和承載特性等。 本文分別對(duì)機(jī)組穩(wěn)態(tài)工況和瞬態(tài)工況兩種典型運(yùn)行工況復(fù)現(xiàn)下的地面試驗(yàn)簡(jiǎn)化影響進(jìn)行分析。
4.1 穩(wěn)態(tài)工況
首先對(duì)機(jī)組穩(wěn)態(tài)發(fā)電工況下的地面試驗(yàn)簡(jiǎn)化影響進(jìn)行分析。 采用湍流風(fēng)速模型, 平均風(fēng)速為14 m/s,水平方向湍流強(qiáng)度為0.16。 具體分析過(guò)程如圖3 所示。
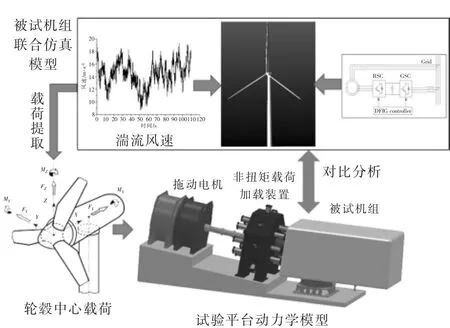
圖3 穩(wěn)態(tài)發(fā)電工況下簡(jiǎn)化影響分析過(guò)程圖Fig.3 Process diagram of the abstraction influence analysis under steady power production condition
基于聯(lián)合仿真模型進(jìn)行穩(wěn)態(tài)發(fā)電工況下整機(jī)動(dòng)態(tài)仿真,仿真結(jié)束后,提取輪轂中心氣動(dòng)轉(zhuǎn)矩及五自由度非扭矩載荷-時(shí)間歷程作為地面試驗(yàn)加載載荷加載到地面試驗(yàn)平臺(tái)動(dòng)力學(xué)模型上進(jìn)行虛擬地面試驗(yàn)仿真, 仿真中被試傳動(dòng)鏈根據(jù)機(jī)組轉(zhuǎn)速-轉(zhuǎn)矩曲線實(shí)時(shí)反饋電磁轉(zhuǎn)矩。 仿真結(jié)束后,將被試傳動(dòng)鏈角速度以及主軸承位置處的六自由度載荷仿真結(jié)果與整機(jī)仿真結(jié)果進(jìn)行對(duì)比(圖4)。
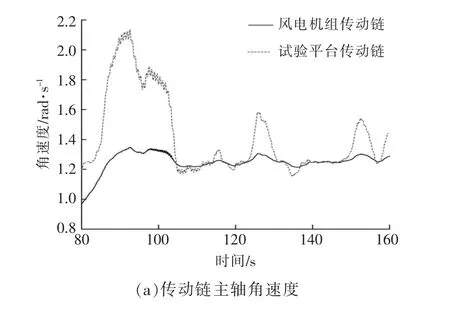
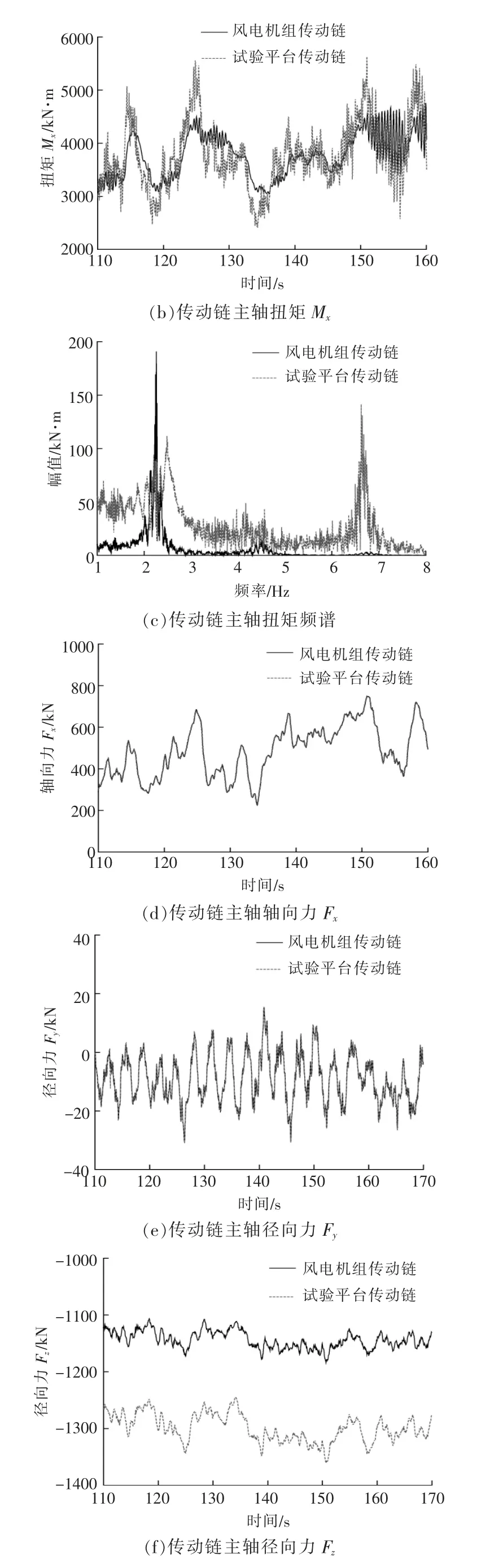
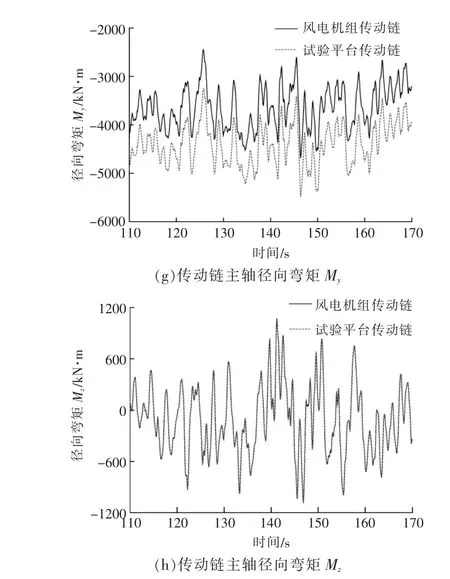
圖4 穩(wěn)態(tài)發(fā)電工況下仿真結(jié)果對(duì)比Fig.4 Simulation results comparison under steady power production condition
圖4(a),(b)為傳動(dòng)鏈角速度與扭矩波形,與實(shí)際機(jī)組相比, 地面試驗(yàn)平臺(tái)上被試傳動(dòng)鏈角速度和轉(zhuǎn)矩波形均具有較大幅值與波動(dòng)值,傳動(dòng)鏈出現(xiàn)超速失穩(wěn)現(xiàn)象。 圖4(c)為傳動(dòng)鏈扭矩頻譜波形, 機(jī)組傳動(dòng)鏈扭矩頻譜中主要頻率為2.26 Hz,該頻率為葉片和塔架耦合振動(dòng)頻率。 地面試驗(yàn)平臺(tái)上傳動(dòng)鏈扭矩頻譜中2.26 Hz 頻率峰值小于機(jī)組值,但其6.65 Hz 扭振頻率峰值較高。由圖4(a)~(c) 分析地面試驗(yàn)平臺(tái)上傳動(dòng)鏈角速度和扭矩與實(shí)際機(jī)組不同的主要原因是: 地面試驗(yàn)平臺(tái)與被試機(jī)組葉輪轉(zhuǎn)動(dòng)慣量存在差異; 試驗(yàn)平臺(tái)上扭振模態(tài)被激發(fā),加劇了傳動(dòng)鏈動(dòng)態(tài)響應(yīng)波動(dòng)。
圖4(d)~(f)為傳動(dòng)鏈軸向力與徑向力波形,試驗(yàn)平臺(tái)上傳動(dòng)鏈軸向力和徑向力波形與實(shí)際機(jī)組波形一致性較好,最大值大于機(jī)組值,最大差值約為110 kN。 出現(xiàn)差值的原因是試驗(yàn)平臺(tái)上傳動(dòng)鏈除受到加載載荷作用, 還承受非扭矩載荷加載裝置的重力作用。 圖4(g),(h)為傳動(dòng)鏈徑向彎矩波形, 地面試驗(yàn)平臺(tái)上傳動(dòng)鏈徑向彎矩最大值大于機(jī)組值, 主要是試驗(yàn)平臺(tái)上非扭矩載荷加載裝置的重力矩作用所導(dǎo)致。 試驗(yàn)平臺(tái)上傳動(dòng)鏈徑向彎矩波形與機(jī)組波形一致性較好。
4.2 瞬態(tài)工況
當(dāng)風(fēng)電機(jī)組運(yùn)行中發(fā)生風(fēng)速突變、電網(wǎng)掉電等瞬態(tài)情況時(shí),傳動(dòng)鏈會(huì)承受較大載荷沖擊和波動(dòng),可能導(dǎo)致傳動(dòng)鏈部件出現(xiàn)損傷[8]。鑒于瞬態(tài)工況對(duì)傳動(dòng)鏈的不利影響,通常在地面試驗(yàn)平臺(tái)上對(duì)該工況進(jìn)行模擬(圖5),以測(cè)試傳動(dòng)鏈強(qiáng)度與可靠性。
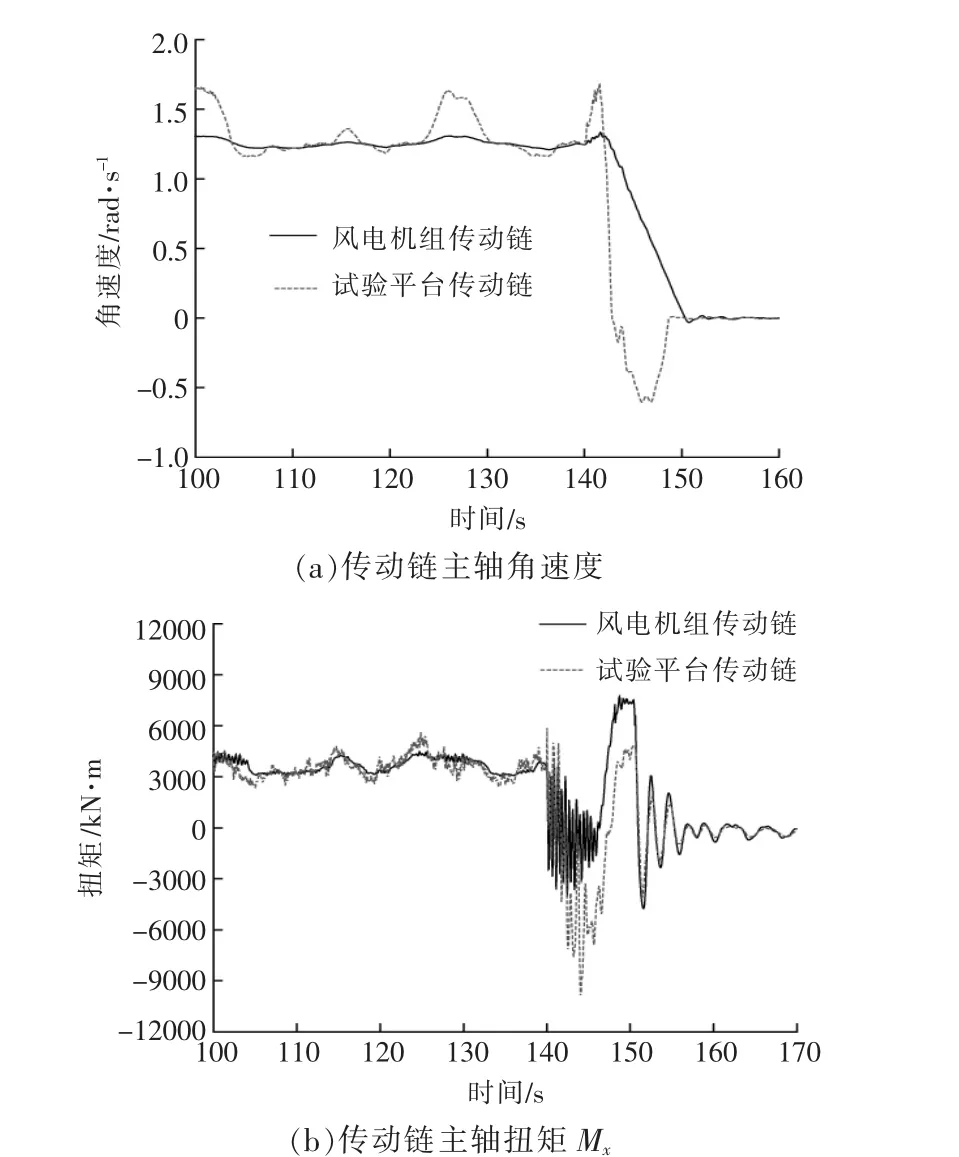
圖5 電網(wǎng)掉電工況下仿真結(jié)果對(duì)比Fig.5 Simulation results comparison under grid loss condition
對(duì)電網(wǎng)掉電工況下地面試驗(yàn)簡(jiǎn)化影響進(jìn)行分析。 采用湍流風(fēng)速模型,平均風(fēng)速為14 m/s,水平方向湍流強(qiáng)度為0.16。 仿真總時(shí)長(zhǎng)為170 s,其中第140 秒時(shí)發(fā)生電網(wǎng)掉電故障, 被試機(jī)組執(zhí)行緊急停機(jī)命令。仿真結(jié)束后,提取傳動(dòng)鏈主軸角速度和扭矩仿真結(jié)果。
由圖5 可知:緊急停機(jī)時(shí),與實(shí)際機(jī)組相比,地面試驗(yàn)平臺(tái)上被試傳動(dòng)鏈角速度跌落時(shí)間更短,跌落幅度更大,試驗(yàn)平臺(tái)出現(xiàn)反轉(zhuǎn);Mx跌落幅度更大,其最大跌落差值超過(guò)15 000 kN·m,傳動(dòng)鏈承受更大的正負(fù)交變載荷, 其內(nèi)部部件更容易產(chǎn)生損傷。因此,以地面試驗(yàn)結(jié)果進(jìn)行傳動(dòng)鏈性能評(píng)估會(huì)產(chǎn)生較為保守的評(píng)估結(jié)論。
5 特定載荷加載工況下簡(jiǎn)化影響分析
地面試驗(yàn)另一重要內(nèi)容是對(duì)被試傳動(dòng)鏈?zhǔn)┘与A躍載荷、正弦載荷等特定靜態(tài)或動(dòng)態(tài)載荷,以驗(yàn)證傳動(dòng)鏈部件承載機(jī)理, 評(píng)估傳動(dòng)鏈部件強(qiáng)度或疲勞壽命等。 以六自由度正弦載荷加載工況為例,對(duì)該試驗(yàn)工況下地面試驗(yàn)簡(jiǎn)化影響進(jìn)行分析(圖6)。
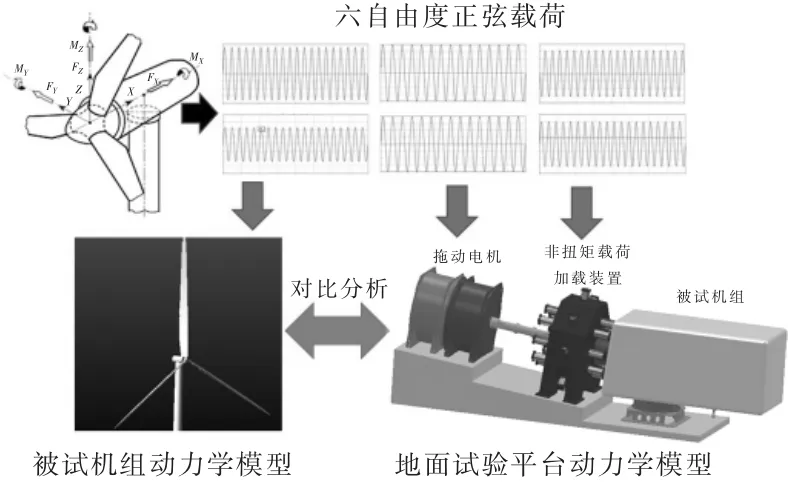
圖6 正弦載荷加載工況下簡(jiǎn)化影響分析過(guò)程圖Fig.6 Process diagram of the abstraction influence analysis under sinusoidal loading condition
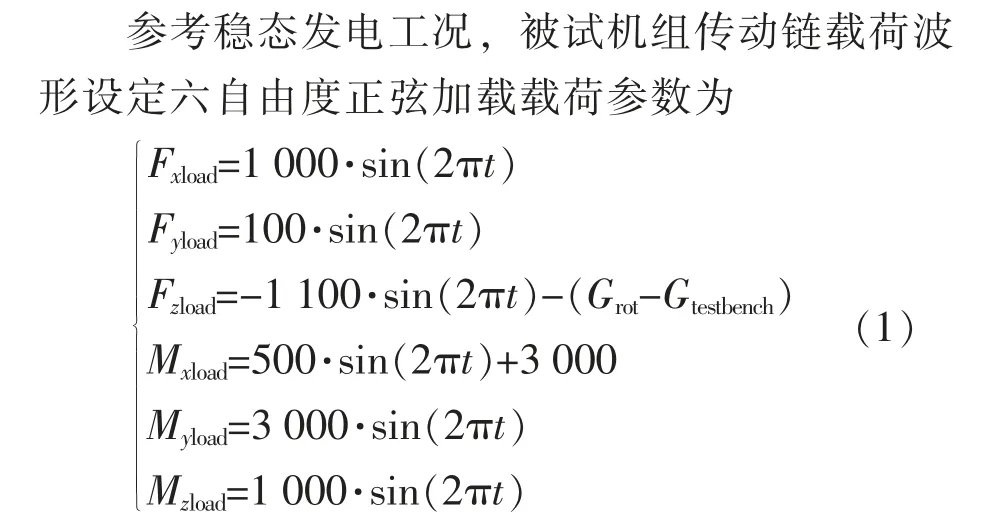
式中:Fxload為軸向力加載載荷;Fyload為Y 向徑向力加載載荷;Fzload為Z 向徑向力加載載荷;Grot為機(jī)組葉輪重力;Gtestbench為試驗(yàn)平臺(tái)上載荷加載裝置重力;Mxload為扭矩加載載荷;Myload為Y 向彎矩加載載荷;Mzload為Z 向彎矩加載載荷。
將六自由度正弦加載載荷分別施加到被試機(jī)組動(dòng)力學(xué)模型和地面試驗(yàn)平臺(tái)動(dòng)力學(xué)模型相關(guān)部件上,并分別進(jìn)行機(jī)組動(dòng)力學(xué)仿真與試驗(yàn)平臺(tái)虛擬試驗(yàn)仿真。 仿真結(jié)束后,提取兩個(gè)模型中傳動(dòng)鏈主軸承位置處的六自由度載荷仿真結(jié)果(圖7)。
由圖7 可知:Fx,F(xiàn)y,Mx及My幅值均大于實(shí)際機(jī)組值, 最大幅值差值約為400 kN;Mz幅值小于實(shí)際機(jī)組值; 正弦加載載荷激發(fā)了試驗(yàn)平臺(tái)和機(jī)組振動(dòng)模態(tài),使傳動(dòng)鏈載荷頻譜在除1 Hz 加載頻率外的其他頻率點(diǎn)出現(xiàn)一定差異。實(shí)際機(jī)組Mx頻譜中出現(xiàn)的1.70 Hz 和3.02 Hz 頻率峰值,分別對(duì)應(yīng)機(jī)組一階和二階葉片對(duì)稱(chēng)Fx,F(xiàn)y,Mx及My頻譜中均出現(xiàn)的0.25 Hz 塔架模態(tài)頻率峰值。 地面試驗(yàn)平臺(tái)上Mx頻譜中出現(xiàn)了6.65 Hz 扭振模態(tài)頻率峰值。 因此,為準(zhǔn)確評(píng)估傳動(dòng)鏈性能,需對(duì)試驗(yàn)平臺(tái)上加載載荷進(jìn)行幅值和頻率修正, 使被試傳動(dòng)鏈承載特性與實(shí)際機(jī)組傳動(dòng)鏈相同, 同時(shí)對(duì)被試傳動(dòng)鏈扭矩信號(hào)進(jìn)行扭振頻率濾除, 或基于優(yōu)化控制算法進(jìn)行試驗(yàn)平臺(tái)扭振抑制。

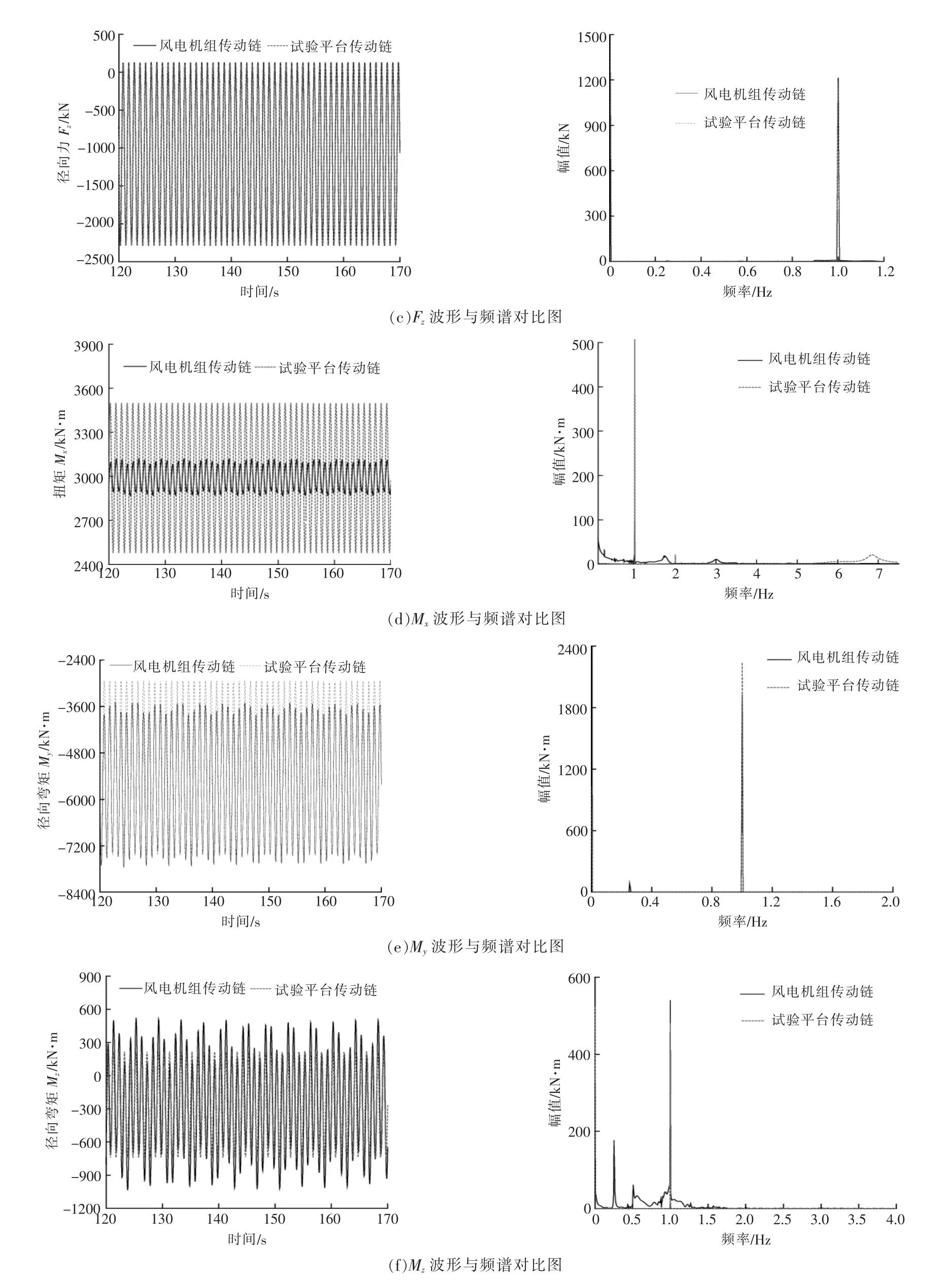
圖7 正弦載荷加載工況下仿真結(jié)果對(duì)比Fig.7 Simulation results comparison under sinusoidal loading condition
6 結(jié)論
本文以某10 MW 級(jí)風(fēng)電機(jī)組傳動(dòng)鏈地面試驗(yàn)平臺(tái)為研究對(duì)象, 采用虛擬仿真方法開(kāi)展了地面試驗(yàn)平臺(tái)簡(jiǎn)化影響分析,得出以下結(jié)論。
①對(duì)兩種典型試驗(yàn)工況下傳動(dòng)鏈動(dòng)態(tài)特性進(jìn)行仿真分析后發(fā)現(xiàn), 由于地面試驗(yàn)平臺(tái)與實(shí)際機(jī)組存在轉(zhuǎn)動(dòng)慣量差異、 關(guān)鍵部件重力差異及模態(tài)差異等, 導(dǎo)致被試傳動(dòng)鏈與機(jī)組傳動(dòng)鏈呈現(xiàn)出不完全一致的動(dòng)態(tài)特性。
②為使地面試驗(yàn)?zāi)軌蛘鎸?shí)反映實(shí)際機(jī)組情況,需要對(duì)試驗(yàn)平臺(tái)上加載載荷進(jìn)行修正或優(yōu)化,包括轉(zhuǎn)動(dòng)慣量補(bǔ)償、 重力補(bǔ)償、 幅值與頻率修正等, 同時(shí)對(duì)傳動(dòng)鏈扭矩響應(yīng)信號(hào)進(jìn)行扭振頻率濾除,或基于優(yōu)化控制算法進(jìn)行試驗(yàn)平臺(tái)扭振抑制。
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
