實測運維數字孿生系統在鉆井船上的應用
2022-08-18 01:56:38王思銘
無線互聯科技 2022年11期
王思銘
(1.招商局重工(江蘇)有限公司,江蘇 海門 226100;2.上海交通大學,上海 200240)
0 引言
海洋探索技術發展日新月異,海洋平臺的操作也越來越復雜。 鉆井船在作業過程中平臺受到風、浪、流等環境因素的影響,伴隨著復雜的設備運行,使得鉆井船作業對實時監控并及時處理問題有著較高的需求。實測運維數字孿生系統對海洋平臺的作業情況進行監測,并將數據實時傳輸給陸地的控制中心。 控制中心通過整合分析實測數據,虛擬出實體平臺的數字孿體(見圖1),以實現在陸地遠程監控的目的。 借助陸上的超算中心和大數據分析,實測運維數字孿生系統可以進一步預測浮式平臺的作業情況,為安全有效的作業提供技術支持。
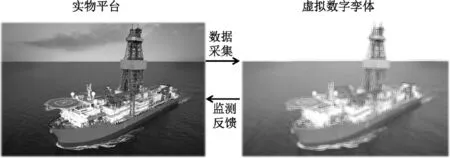
圖1 數字孿體
實現實測運維數字孿生系統的部署需要硬件和軟件的結合。 近年來,我國在海洋平臺數字孿生領域取得了很多成果,比如采用低功耗無線自組網綜合定位技術,在海洋平臺實現智能人員定位[1]。 利用虛擬現實技術建立安全的交互平臺,模擬海上石油鉆井平臺環境,實現平臺工作人員的消防演練仿真[2]。 在海洋石油平臺上為機組安裝振動監測和數據采集裝置,通過網線與遠程智能診斷中心相連接,開發系統數據處理軟件,對設備進行遠程故障診斷[3]。 基于機器學習與深度學習方法,對正常工況下的海洋平臺檢測數據進行學習并得到診斷模型,針對新數據的損傷情況進行評估以實現在線損傷識別[4]。 基于安裝在流花海域的“挑戰號”海洋平臺的錨鏈水平力傳感器裝置,開發自容式姿態監測裝置,用于測量不同水深處的系泊加速度和傾斜角度,從而計算出系泊力[5]。
國際上在物聯網和數字孿體方面正逐步推廣到商業階段。 2018 年,Kongsberg Digital 推出了“數字雙胞胎”服務,建立虛擬油氣生產裝置的模型,保證使用者可以遠程查看平臺的數據。 2020 年,DNV 推針對數字孿體與TechinipFMC 合作開發行業推薦辦法,構建該技術的運行標準。
本文針對鉆井船的結構、系統和操作特性,探討基于數字孿生技術的實測運維數字孿生系統的部署。 實現在遠程的監控中心監測平臺的運行狀態,并利用歷史收集的監測數據預測平臺運行情況。
1 結構健康監測
結構健康監測主要應用于陸上大型結構物的結構安全保障領域,其中橋梁的結構健康監測應用較多。在海洋平臺領域,結構健康監測多數應用于導管架。其結構損傷實時監測主要以振動檢測為主,它可以檢測得到導管架的動力響應參數,包括頻率、阻尼和模態等數據,進而能夠在整體上評估結構損傷[6]。 不同于固定式生產平臺,鉆井船作為浮式海洋平臺,結構監測主要是通過監測結構薄弱部位的應力水平,布置應力傳感器和加速度傳感器,結合通信模塊將傳感器數據傳輸給主機[7]。 主機根據接收的數據進行濾波、統計分析以及疲勞損傷估計。 鉆井船的月池區域需要承受環境載荷外和鉆井設備作業時的載荷,同時月池因布置于船中,這種布置設計需求也使得其容易在總縱強度下發生中拱和中垂的變型,圖2 為典型鉆井船月池區域的有限元模型受力分析,因此鉆井船的結構健康監測主要為月池關鍵區域的監測。

圖2 典型鉆井船的月池區域有限元模型受力分析
1.2 系泊監測
除了主體結構外,錨鏈受力也是浮式平臺結構監測的一部分。 錨鏈的監測主要以應力監測并集合采集的平臺運動位置求解系泊張力。 因測量儀布置在錨鏈上,測量儀需要有續航能力和水聲通訊能力,并在平臺上布置水聲接收器將訊息傳遞到平臺上的主機。 近些年,設計的鉆井船設計從第三代開始就已經使用動力定位來代替錨泊[8],新型的鉆井船一般不需要考慮錨鏈的監測。
1.3 鉆井隔水管
深水鉆井隔水管受到波激振動和渦激振動,容易產生疲勞破壞進而帶來安全風險。 目前鉆井隔水管的監測主要以水下的渦激疲勞監測為主,通過安裝水下傳感器實現監測隔水管的應變類參數、運動參數、環境參數和位置。 其中,運動參數主要包括傾角、角加速度、加速度和位移等數據。 傳感器監測的數據通過水聲通信機傳輸到主機,并結合監測到的環境參數和位置數據對渦激振動和管線偏移的評估,分析其疲勞損傷。 在實際工程應用上,我國的“奮進號”“海洋石油982”和“興旺號”等鉆井平臺已經完成了多次深水隔水管監測作業[9]。
2 運維監測
2.1 海況監測
海況的實時監測對于鉆井作業的安全十分重要,其中主要為風、浪、流的監測。 一般而言,是在鉆井船駕駛甲板上開闊無遮擋的位置安裝風速風向傳感器測量風向和風速;在舷側安裝聲學多普勒流速剖面儀和測波儀測量流速和有義波高。
2.2 船體姿態和定位監測
鉆井船作為浮式平臺一般使用電羅經,垂向運動單元VRU,DGPS 差分全球定位系統和聲納定位系統來測量其運動姿態和位置,聲吶定位系統用于鉆井作業時的水下定位。 另外還需要監測鉆井船的裝載工況,一般是在船底和液艙布置壓力傳感器監測船舶吃水和液艙液位。
2.3 鉆井作業情況監測
鉆井作業監測主要包括鉆井深度、溫度、流量、鉆頭的鉆速、壓力和扭矩等數據。 進而實現對鉆頭、鉆具作業情況的監測。 作業中鉆井作業人員將根據監測的數據,與理論模型計算結果進行對比,評估鉆井參數是否異常,并且實時優化鉆井參數,提高工具的使用壽命,避免事故的發生。 另外,除了設備作業情況監測,還可以將地質信息和鉆井信息融合進行三維可視化顯示地層和鉆井情況動態變化[10],提高鉆井作業的決策準確性并保障鉆井安全。
水下防噴器(BOP)作為井口壓力控制裝置,對于生產安全十分重要。 BOP 除了使用主動控制系統外,還可以考慮配置防噴器應急聲吶監控系統,以提高安全作業等級。 其在測量和監控水下井口狀態有著獨立性,通過水下和水面換能器將井口數據傳輸回主機[11]。
2.3 常規安全監測
常規安全監測主要包括火災監測和水密完整性監測,其中火災監測根據鉆井船設計時的防火分區進行布置,例如應急發電機室、中控室、生活區等,通過安裝感煙探頭、感溫探頭和手動呼叫等元器件實現火災的監測。 一般應急關斷系統會根據火災探測報警信號,直接控制相關的助燃設備,例如油泵、風機等和防火風閘和防火門等裝置,開啟消防系統以控制火情。 水密完整性監測主要為艙室侵水監測和水密門狀態監測,關鍵的水密門需要配置報警和控制模塊,控制模塊連接門的電機或油機,控制門的開關和限位,報警模塊連接門的電源、電機、控制模塊狀態等信息,用于反饋水密門的運行情況。
2.4 設備運行監測
設備運行監測主要為柴油發動機和推進器的監測,前者是鉆井船動力的來源,后者是鉆井船定位和航行的關鍵設備。 當前研發的獨立發動機實時監測系統,其監測方法和數據分析都各不相同[12]。 目前,獨立實時監測發動機和推進器的系統在海洋平臺上的應用并不常見,監測數據還主要是依賴設備運行時輸出的運行參數,其中發動機主要為功率、電流、溫度和油耗等,推進器主要為各個螺旋槳轉速和方位角等。
2.5 視頻監控
視頻監控系統(CCTV)在海洋平臺的應用已經非常成熟,在鉆井船上的應用主要為對鉆井作業中的關鍵設備的監控,包括頂驅、補償器、泵艙、泥漿池、月池和吊車區域等。 它在危險監控和事故追查中起著重要作用。 隨著計算機網絡傳輸和圖像處理技術的發展,視頻監控也朝著智能化發展[13]。 智能視頻監控使得計算機可以從海上作業中實現對特定作業的識別,在高風險區域布置視頻監控系統,可以降低人工巡護的工作量,提高巡檢效率[14]。 需要注意的是,在鉆井船的危險區域布置視頻系統,使用的攝像頭和無線上網熱點需要帶有防爆功能,在露天區域布置需要帶有防水功能。 為了節省電纜鋪設,視頻監控系統需要分區域布置POE 交換機,一般為了保證通信質量,區域交換機之間通信距離較大時,需要采用光纖通信,距離較短可以選用網線。
3 通導系統
對各區域、系統、設備和作業情況進行數據采集并傳輸到船上主機或相關服務器后,對多源信號進行集成和整合,使其滿足智能系統的轉換要求,并且運行流暢轉換互不影響。 數據進行本地保存后傳送到陸地控制中心。 受到遠洋衛星通信通道帶寬和成本的限制,需要對采集的數據進行壓縮加密。 模擬數據、開關量及報警數據壓縮后動態響應為毫秒級。 音視頻數據壓縮需要考慮視頻監測占衛星寬帶500 kbs 以下,以滿足陸地控制中心實時查看關鍵區域的視頻畫面。 陸地控制中心將傳輸的數據進行解密,并保存到數據庫中,數據硬盤容量一般需要滿足短期存儲60 天以上的數據記錄,長期存儲20 年以上的報警時刻和整點時刻的全部數據記錄。
4 陸地遠程監控
陸地控制中心接收到數據,結合已經建立并配置好的虛擬模型得到實時的平臺特征,即構建物理實物的數字孿生系統。 數字孿生系統是實體平臺在信息空間的1 ∶1映射[15],其主要表現為三維模擬成像,利用計算機虛擬現實,實時反映實體平臺的運行狀態(見圖3)。陸地控制中心有超算中心和陸上網絡系統作為支撐,可以更快速高效的計算鉆井船的運作情況,并及時更新適合的算法,使得分析結果更可靠。
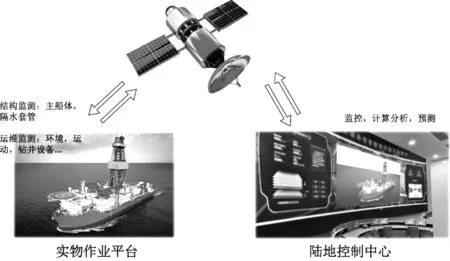
圖3 陸地遠程運維監控
陸上的數字孿生系統重要的意義在于,分析和挖掘所采集的大數據,并根據歷史數據預測平臺的運行情況,保障平臺的安全作業。 不同的作業采用不同的分析策略,可以根據已知的條件計算通過數值同步模擬系統的運行情況;可以通過機器學習,用歷史數據預測一定時間內的未來運行情況。 機器學習一般應用于理論模型復雜、計算量巨大或非線性極高的分析中,例如船舶實時運動[16-17]。 根據實際監測結果,分析不同預測策略的準確程度,隨著采集數據的不斷積累針對性的更新不同作業的分析策略。 大型的陸地控制中心通過監控不同海洋平臺的數據,隨著經驗的累積,各系統的分析算法得到優化,可以為海洋平臺的作業提供更好的技術解決方案。
5 結語
通過對鉆井船的結構關鍵區域和運維關鍵系統布置傳感器并實時采集數據,壓縮加密后通過衛星傳輸給陸地的控制中心,構建實體平臺的數字孿生系統,進而實現遠程對鉆井船的運維實測及監控。 在大數據和算法優化的幫助下,實測運維數字孿生系統的應用不僅可以監控鉆井船的運維情況,還可以在一定程度上預測各系統作業的運行,很好地提高鉆井船作業的安全性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
