應用于大水面養殖的精準起捕設備結構設計與分級試驗
2022-08-18 02:40:54游洋王萍張華曲曉玉馮德軍桂福坤
浙江海洋大學學報(自然科學版) 2022年4期
游洋,王萍,張華,曲曉玉,馮德軍,桂福坤
(1.浙江海洋大學國家海洋設施養殖工程技術研究中心,浙江舟山 316022;2.浙江海洋大學海洋科學與技術學院,浙江舟山 316022;3.浙江海洋大學船舶與海運學院,浙江舟山 316022;4.浙江海洋大學水產學院,浙江舟山 316022)
大水面養殖是指利用海洋、湖泊、水庫等水域開展養殖的一種總稱。近年來國家出臺了《關于推進大水面生態漁業發展的指導意見》,保障了大水面養殖的發展空間,推動了大水面漁業發展,促進了大水面養殖轉型升級。通過養殖而獲取的優質海產品正逐步成為人們餐桌上的主角,而“吃魚難”的問題也轉變成如何“吃好魚”,消費者更多地要求魚規格統一化,品質不受損,鮮活程度高[1-2]。現有的大水面養殖多使用圍網、刺網、張網等傳統捕撈模式進行起捕[3-5],這些起捕模式都為大批量起捕,人工成本高且耗時多,在起捕過程中多使用網目密度高的網衣直接起捕,在提拉過程中網目會產生形變對魚體造成擦傷,使養殖戶難以根據市場需求進行定量、定規格捕撈;而釣捕、籠捕等小批量捕撈模式捕撈量少、無法分級捕撈。因此研發按需、定時、暫養、損傷小的起捕設備對大水面起捕具有重要意義。
目前常用的分級捕撈裝置精準分級大都采用先起捕、后分級的模式,使用手動分級和機械式自動分級設備進行分級,整個捕撈過程中易使魚體損傷、易脫水造成魚體二次損傷,對品質造成顯著影響[6-7]。國內外學者對水中分級進行了研究,JOHNSONS,et al[8]設計了剛性的鋁制分級柵和“Flexi-Panel”的柔性分級柵,都是安裝在地拉網上用于分離魚,需要漁船牽引,操作復雜,不適合大水面養殖;魯偉等[9]研制的PVC管柔性格柵分級裝置應用于網箱養殖,具有分級捕撈的作用,但這種設備綁在網衣上,分級區域較小,部分魚會從分級結構的底部逃出;鄭國富等[10]設計出了一種剛性棱臺框架,分級柵格使用PVC 管制成,但是在分級過程中網衣易發生變形影響分級效率;陳曉龍等[11]針對大水面設計了一套通過改變網衣網孔大小逐級進行調控的起捕裝置,但依靠改變網孔進行分級,直接提拉網衣起捕,對魚易造成損傷。在已有的研究中,通過分級柵分級的效率明顯優于網孔分級,但在分級柵間距的設計時通過擬合體重和體寬的關系,根據所需體重計算出體寬[12-13],直接將體寬設計為分級柵間距,沒有對體寬和分級柵間距的關系進行系統的研究。此外,目前分級只能篩選大于某一規格的魚,無法精確篩選體寬為具體某一規格或者某一區間規格的魚[14-15]。
綜上所述,目前的研究及實際生產中,大水面養殖起捕存在起捕量難控制、魚體損傷難解決、漁獲物規格不一致等問題。本文根據大水面起捕的要求,設計了一套通過改變分級柵間距控制魚類體寬的起捕設備,可以起捕大于某一體寬的魚類。對起捕設備的結構和工作原理進行了介紹,通過小尺寸試驗研究分級柵間距與鱸魚體寬的關系確定分級柵設計原則,針對分級柵無法篩選單一規格或某一區間規格的魚,提出了具有無級可調功能的雙層分級結構,通過實驗室試驗驗證雙層結構的可行性,為未來大水面養殖高端起捕提供參考。
1 結構與工作原理
1.1 設備結構
本研究設計的養殖精準起捕設備主要由蓋網結構(網蓋和蓋座)、分級結構(分級柵)、取魚結構(集魚箱)3 部分組成,圖1 為大水面養殖精準起捕設備結構圖,整個起捕設備具有按需、定時起捕,以及魚類暫養等功能。蓋網結構由網蓋和蓋座組成,網蓋為圓形結構,頂部設計吊耳與吊繩相連,單獨控制網蓋的升降。蓋座為圓臺形結構,在捕撈過程中增大起捕設備的捕撈范圍,同時與網蓋更容易貼合;分級結構為起捕設備的核心結構,位于起捕設備的中部位置,為十二邊形結構,頂部與蓋座相連,在連接位置設計起吊結構控制起捕設備的升降,底部與集魚箱相連,經過誘捕進入起捕設備的魚可以經過分級結構去小留大得到體寬大于某一尺寸的魚;取魚結構在起捕設備的底部,均勻分布6 個集魚箱,當有需求時不需要進入起捕設備,根據需求依次打開每個集魚箱即可取魚,縮短捕撈時間,減少對其余集魚箱內魚類的影響,保證魚類品質。在起捕設備底部設計底座結構防止集魚箱沉入底質中,影響集魚箱內魚的存活率。
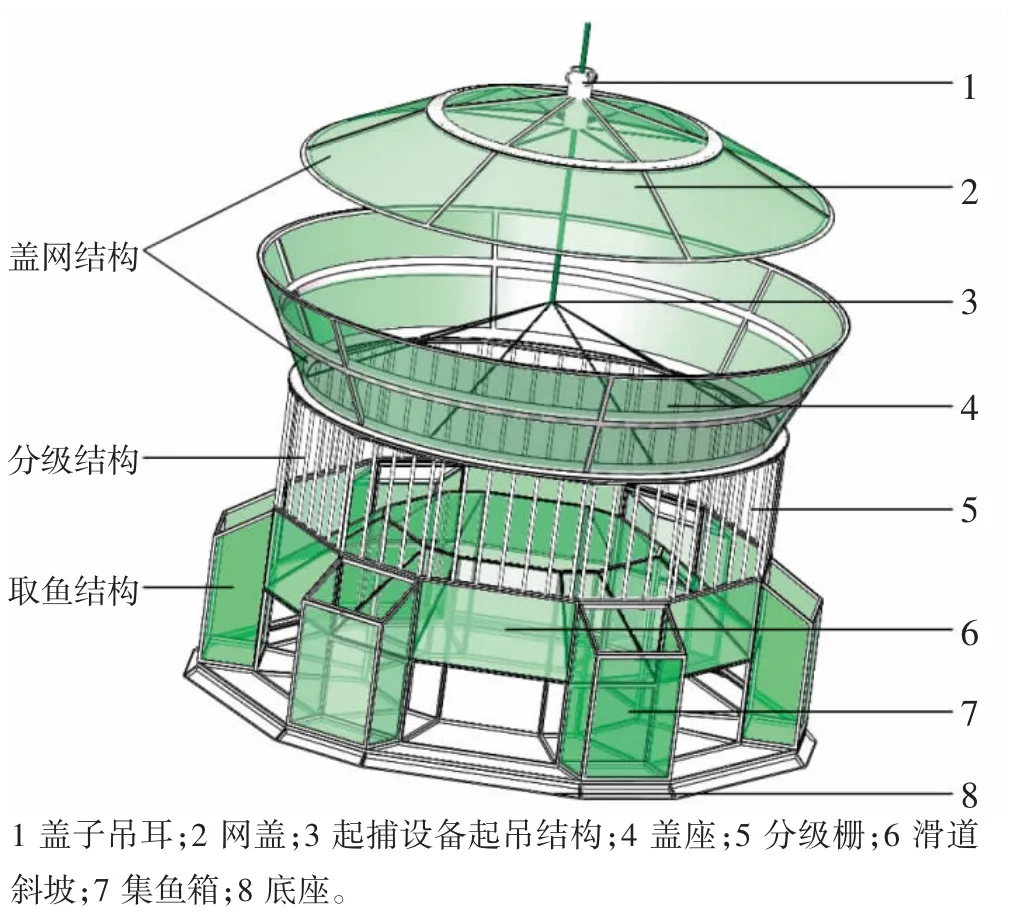
圖1 大水面養殖精準起捕設備結構圖Fig.1 Diagram of structure of the precious harvesting equipment for large water bodies
1.2 工作原理
起捕設備工作主要分為誘集階段、提網階段、蓋網階段、暫養階段、取魚階段等5 個階段(圖2),圖中藍色個體表示待捕的魚。在起捕前,將網蓋提升至水面之上,起捕設備潛于魚類適宜生活水深,并在其正上方水面拋灑飼料,誘集魚類集聚,在魚類攝食期間緩慢地將起捕設備提升至蓋座頂端露出水面,將魚限制在起捕網籠中。當需要直接起捕時,應將起捕設備靜止一段時間讓魚自由逃逸后再對籠內留存的魚進行起捕。起捕過程中將起捕設備升至分級柵底部距水面約40 cm 以保證魚的存活,然后根據需求量打開集魚箱,從集魚箱中取魚,這一個過程中可以做到按需定量起捕,同時在捕撈中不會對其余取魚箱內的魚類造成損傷。當不需要直接起捕時或取魚完成后集魚箱內還有魚時,則將網蓋下降封住起捕設備,隨后將起捕設備連同網蓋一并下潛至魚類適宜生活水深進入暫養階段。當起捕設備內魚全部捕撈完畢后,將起捕設備提升至水面,待有起捕需求時再次進行起捕作業。
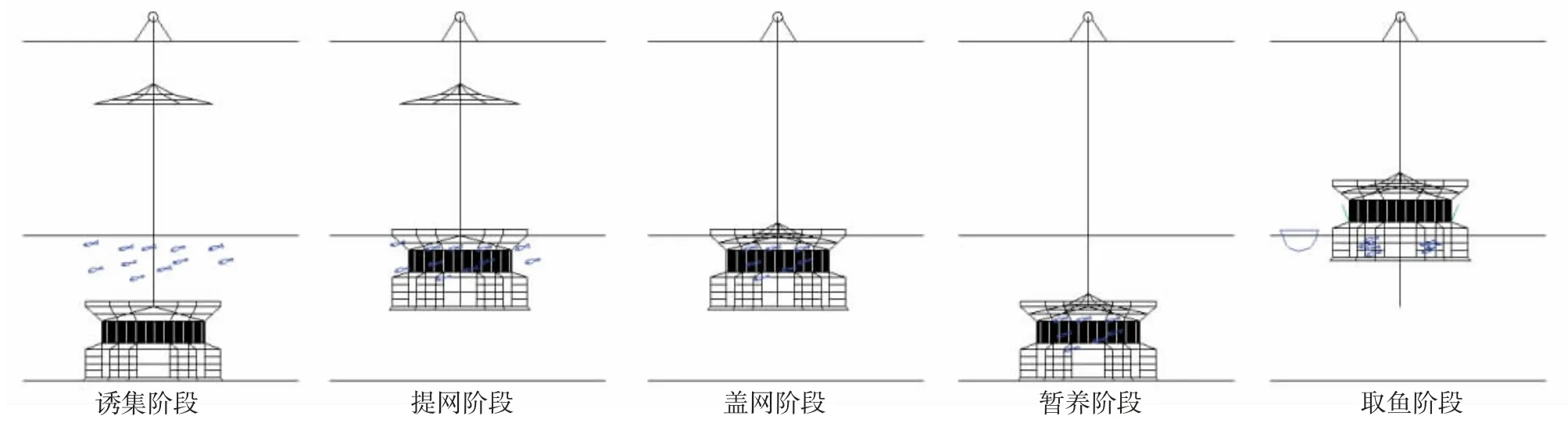
圖2 大水面養殖精準起捕設備工作示意圖Fig.2 The working diagram of the precision harvesting equipment for large water bodies
2 分級結構設計與試驗
在大水面養殖精準起捕設備結構中,分級設備決定著起捕設備內魚的規格,是實現定制捕撈的關鍵結構。本部分將通過對不同形式的分級柵進行小尺寸試驗,研究分級柵間距與魚體寬之間的關系,為起捕設備分級柵的設計和規格的確定提供參考。
2.1 試驗用魚預分級試驗
試驗時因購買的魚重量、體寬差距較大,為精準測量分級柵分級效果,在試驗開始前根據體寬對試驗用魚進行粗略分級,通過隨機抽取體型差異較大的6 尾鱸魚進行體重體寬測量,將分級柵間距設計為15、17、19 mm 3 種規格,將鱸魚進行預分級。
試驗用魚預分級實驗在浙江海洋大學國家海洋設施養殖工程技術研究中心設施養殖工程技術實驗室跑道式試驗水槽中進行(圖4),分級試驗在玻璃一側進行,方便觀察水槽內魚的預分級試驗情況。此外,在實驗兩段放置隔板防止魚類穿過Ⅳ區通過水槽回到Ⅰ區。該分級柵主要由2 塊亞克力板材(圖3(b)(d)),多條PVC 管,多組亞克力插塊組成(圖3(c))。其中,頂部固定板兩端打有20 mm 的貫穿孔,PVC 管恰好穿過;底部固定板兩端也打有20 mm 的管貫穿穿孔,亞克力板材以及兩側的2 根PVC 管共同構成了穩固的分級柵主體框架;根據分級格柵設計的間距選取相應尺寸的頂部和底部亞克力塊,起到固定分級柵尺寸的作用,分別將頂部和底部亞克力塊沿同一方向插入到頂部和底部分級柵中,相鄰的亞克力塊中間插入PVC管,保證PVC 管恰好卡在板材和亞克力塊中間不會移動,得到規格一致的柵格間距,保證分級柵間距的準確性。當最后一個柵格如果出現了不能滿足分級柵間距的情況,則需要額外增加1 根PVC 管,使分級柵間距小于設計的柵格間距。
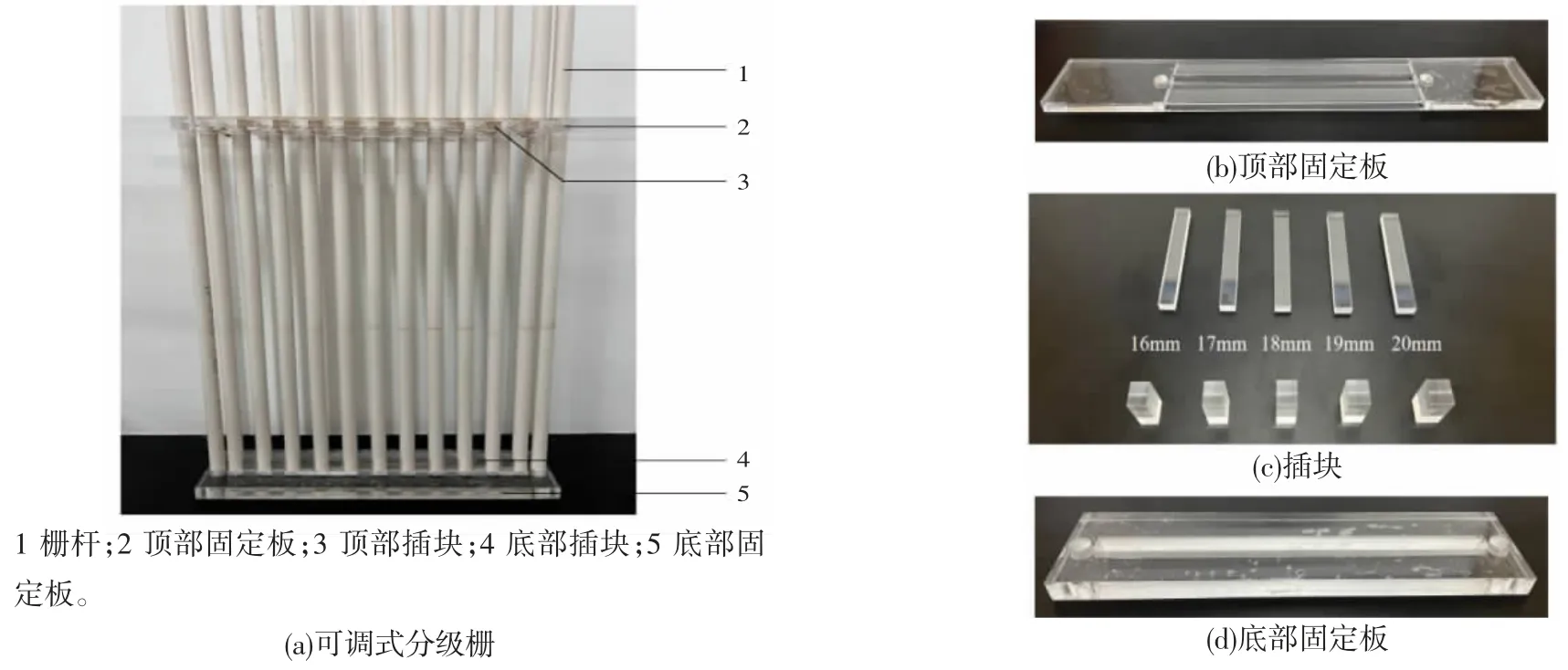
圖3 試驗用魚預分級試驗分級柵Fig.3 Grading grid for the pre-grading of the fish
試驗裝置布置如圖4 所示,試驗時,從鱸魚暫養池中隨機選取一定尾數的鱸魚,放入跑道式水槽一側,開啟攝像設備,在前進方向一側開啟造流泵,利用鱸魚頂流前進特性讓鱸魚向前游動,分級柵根據試驗設計為15、17、19 mm,共3種。試驗開始后魚自由移動20 min,試驗結束后將游過不同分級柵的鱸魚從小到大分為Ⅰ級、Ⅱ級、Ⅲ級、Ⅳ級,對各區域內的鱸魚數量及體重(g)、體寬(mm)進行統計。
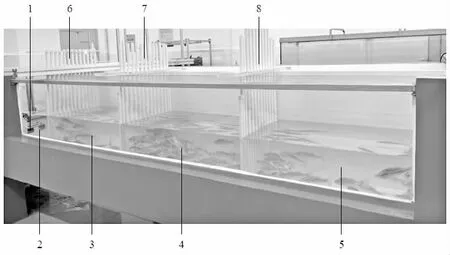
圖4 試驗用魚預分級試驗布置Fig.4 Experimentalsetup forfish pre-grading
經過試驗用魚預分級試驗,對165 尾鱸魚進行了分級,試驗后鱸魚穿越分級柵數量統計如表1 所示。

表1 試驗用魚預分級試驗結果匯總Tab.1 Results of the fish pre-grading test
2.2 分級設備分級效果研究
2.2.1 實驗室試驗
在試驗用魚預分級試驗后,將試驗用魚分成了4 級,為模擬起捕設備在起捕時的真實環境,驗證分級設備分級的準確性和實際應用效果,將圖1 的起捕設備進行簡化,根據起捕設備的分級柵設計分級結構。
分級結構設計時頂部固定結構如圖5(a)所示,由外徑350 mm,厚度5 mm,高度25 mm 和外徑300 mm,厚度5 mm,高度25 mm 的亞克力標準圓管與4 個外徑350 mm,內徑290 mm,圓心角為7.9°,厚度3 mm 的扇環狀亞克力片構成,底部固定結構如圖5(b)所示,由外徑350 mm,厚度5 mm,高度25 mm 和外徑300 mm,厚度5 mm,高度25 mm 的亞克力標準圓管與外徑350 mm,環寬30 mm,厚度3 mm 的圓環形亞克力片構成。
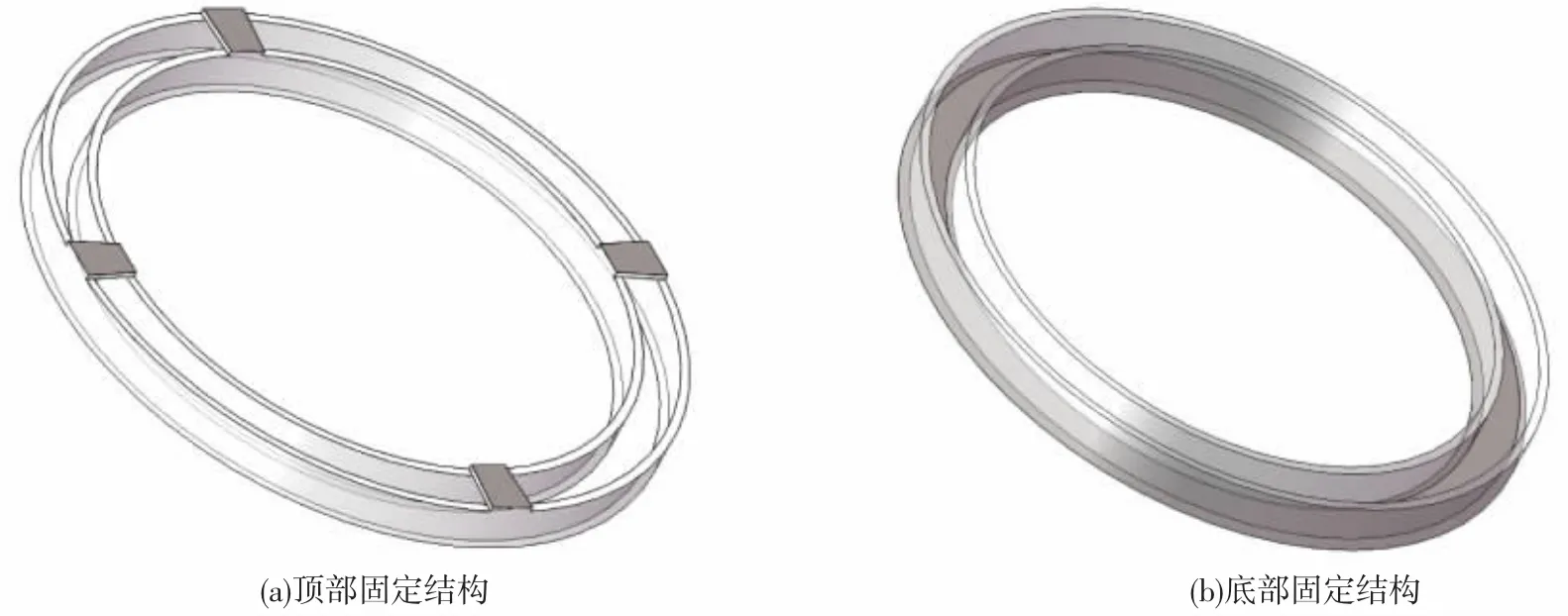
圖5 亞克力管固定結構設計圖Fig.5 Design drawing of fixed structure of acrylic tube
分級結構實物如圖6 所示,由圓柱形分級框,2 組亞克力管固定結構,多條PVC 管,多組亞克力管組成。根據分級格柵設計的間距選取相應尺寸的頂部和底部亞克力管,因亞克力管固定結構環寬為20 mm,因此當分級柵間距大于20 mm 時應選取單個直徑小于20 mm 的多個亞克力管控制間距,頂部亞克力管在上端位置進行打孔,在使用時通過鋼絲連接亞克力管,保證亞克力管不會掉落,分別將頂部亞克力管和底部亞克力管沿同一方向插入到頂部和底部固定結構中,將PVC 管插入圓形可調式分級柵中,保證PVC 管恰好卡在板材和亞克力管中間不會移動,得到規格一致的柵格間距,實現控制柵格間距,當最后一個柵格如果出現了不能滿足分級柵間距的情況,則需要額外增加1 根PVC 管,使分級柵間距小于設計的柵格間距。
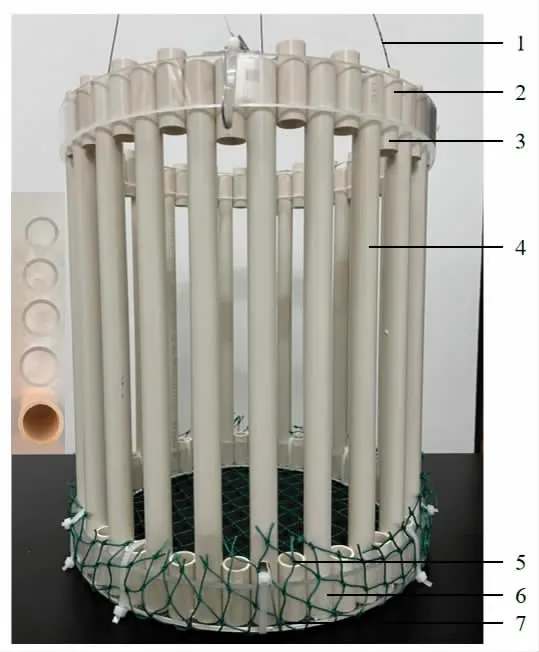
圖6 分級結構實物圖Fig.6 The photo of grading equipment
試驗時,隨機選取體寬17~19 mm 分級區域內的鱸魚60 尾,分級柵間距為18 mm,共進行4 組試驗,每組試驗15 尾魚,將魚放置在分級框內,讓魚自由游動20 min。分級完成后,對各區域內的鱸魚數量和體質量、體寬進行統計。試驗裝置布置如圖7 所示,試驗桶為內徑2.1 m,深度為1.2 m 的暫養桶。
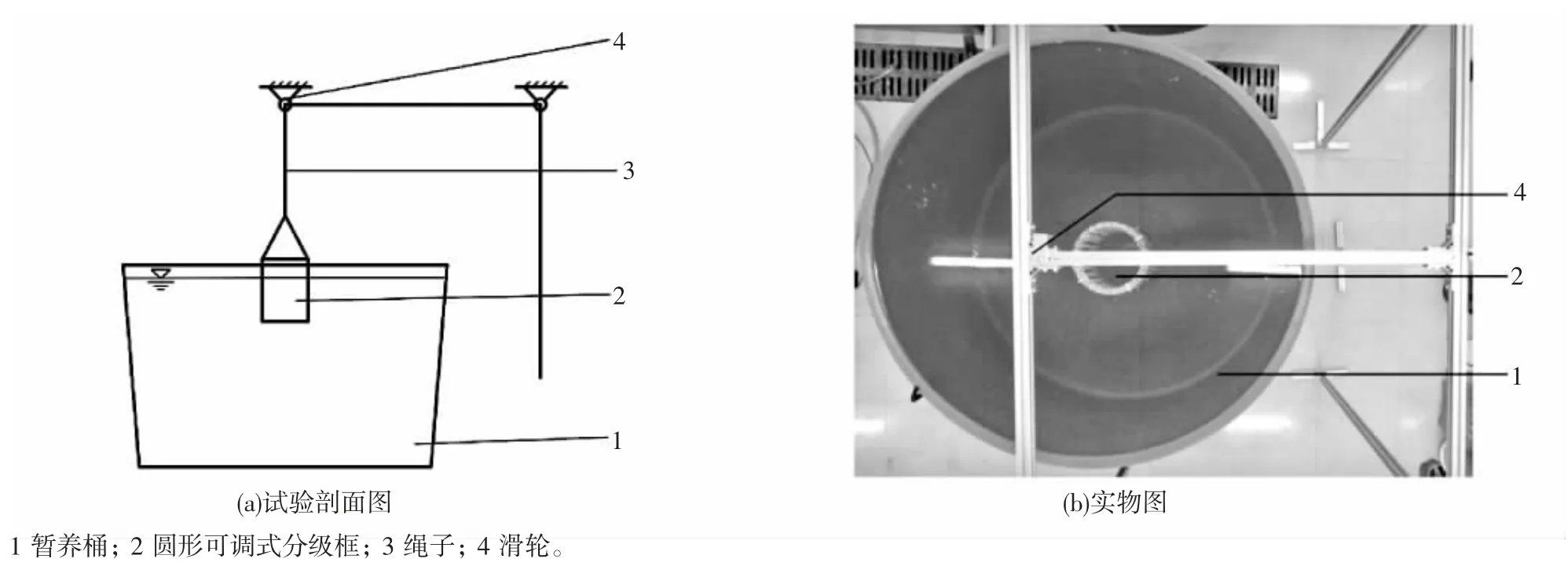
圖7 分級設備實用性驗證試驗布置圖Fig.7 Experimental setup for practicability verification test of grading equipment in laboratory
試驗過程如圖8 所示,通過觀察攝像設備可以發現鱸魚對于分級柵并沒有明顯的排斥,體寬小于分級柵的魚在穿過分級柵后可以正常活動,沒有受到分級柵的影響。
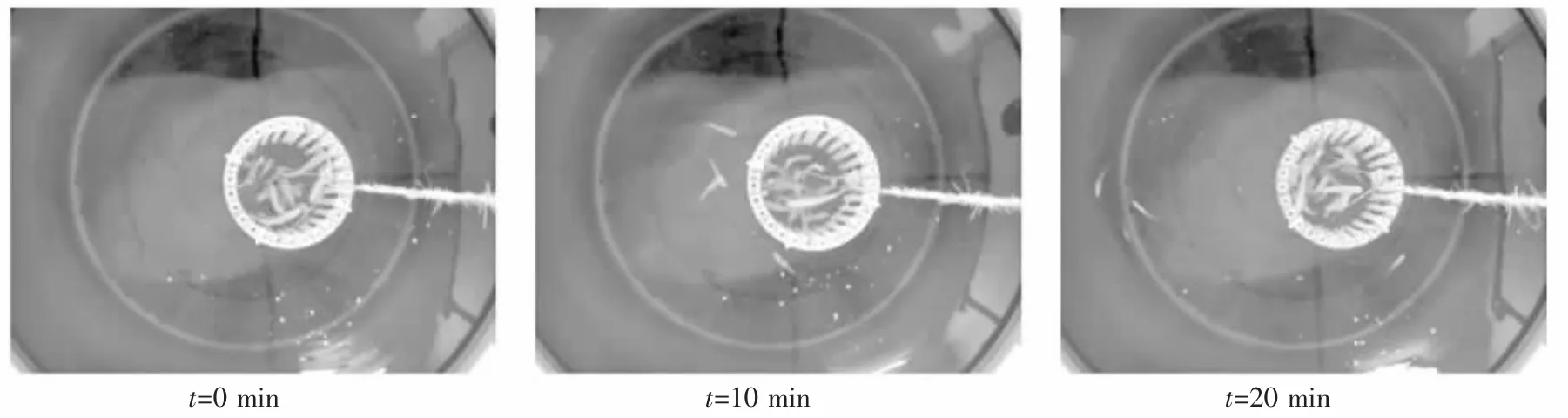
圖8 分級設備實用性驗證試驗過程Fig.8 The process practicability verification test of grading equipment
試驗結果如圖9 所示,60 尾鱸魚中,體寬小于18 mm 的有39 尾,大于18 mm 的有21 尾,實際穿過分級柵的有38 尾,體寬均小于18 mm,未穿過分級柵的有22 尾,其中21 尾體寬大于18 mm,1 尾體寬為17.88 mm。試驗結果表明,針對鱸魚在分級柵間距設計時只需要對需要起捕尺寸的魚體寬進行測量即可,不需要對分級柵間距進行增加或減小。由于鱸魚個體之間存在差異,個別鱸魚個體體寬較寬,體質量較輕,這與每條鱸魚本身的生物學參數有關。
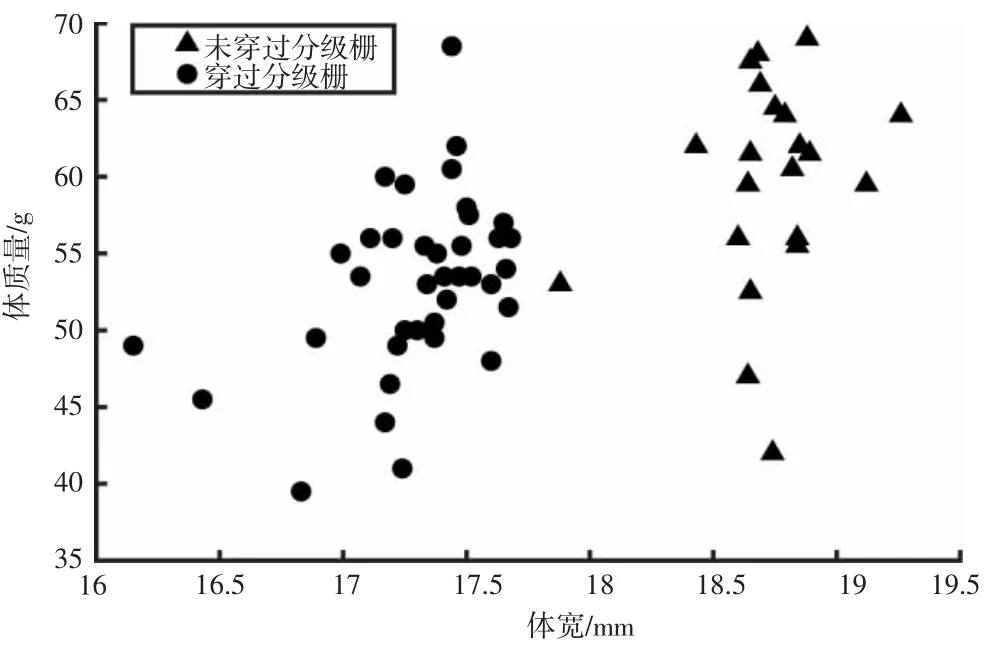
圖9 分級設備實用性驗證試驗結果Fig.9 The results of practicability verification test of grading equipment
2.2.2 大水面現場試驗
在對分級結構進行了實驗室試驗確定了分級柵柵格間距的選擇依據后,設計了分級結構大水面試驗裝置。通過試驗驗證分級結構在大水面試驗時周圍環境對分級效果是否存在影響,分級是否具有可操作性,保證分級結構在大水面養殖應用時具有可行性。
分級結構試驗裝置如圖10 所示,試驗裝置由不銹鋼方管一次成型,直徑1 m,高度1 m。裝置中間有1根不銹鋼方管,根據試驗要求可以設置0.5 m 和1 m 2 個高度的分級區,用于測試鱸魚在大水面中逃逸的效果。分級柵間距根據試驗要求進行設計;浮筒保證裝置在測試時一直浮于水面,防止鱸魚從頂部逃逸;防逃網用于留存穿過分級柵的鱸魚,以便試驗結束后對鱸魚的數量和生長指標進行測量。

圖10 大水面試驗裝置Fig.10 Experimental set up of practicability verification test of grading equipment in large water bodies
選取舟山市長峙島一處池塘內進行現場試驗(圖11),試驗設計分級柵間距為20 mm。試驗中隨機選取23 尾鱸魚,在岸邊將其放置在分級裝置中,然后將試驗裝置慢慢推至遠離岸邊處靜置30 min。試驗完成后將裝置拉回進行計數,觀察鱸魚逃逸情況,逃逸的鱸魚留存在防逃網中。試驗通過統計分級裝置內和防逃網內鱸魚的數量及測量鱸魚的體重、體寬來確定分級效果。

圖11 分級結構大水面試驗場地Fig.11 The large water bodies test site for graded structures
試驗完成后對所有魚的體重體寬進行測量,試驗結果如圖12 所示。根據試驗結果,23 尾鱸魚中,體寬小于20 mm 的有19 尾,全部穿過分級柵,大于20 mm 的有4 尾,全部未穿過分級柵。試驗結果表明分級效果明顯,因此在實際應用中可以使用該分級結構對魚進行分級。
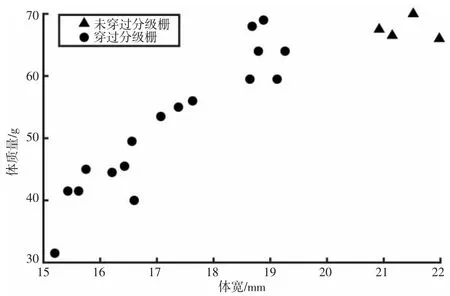
圖12 試驗逃逸情況Fig.12 The result of fish escapes in the filed test
3 分級柵優化設計及試驗
在對分級結構進行可行性驗證后,發現設計的分級捕撈裝置存在2 個問題:(1)在分級間距調整時不能根據需求進行動態調控,實現無級分級,例如在本試驗中使用的亞克力管及PVC 管在每次調整分級柵間距時都需要更換,耗時較多,浪費材料;(2)分級柵只能篩選大于某一規格的魚,無法進行單一規格或某一區間魚的篩選。結合目前市場所需的規格個性化訂制需求,對起捕設備分級柵進行了優化,提出了具有無級可調功能的雙層分級柵設計(圖13)。雙層分級結構設計為圓形,具有按需精準捕撈、自動機械控制、自由無損逃逸、起捕防逃保護等功能,主要由分級柵結構和控制結構組成。其中分級柵結構每層由不可移動結構和可移動式結構組成。不可移動結構由2 組定尺寸固定框、多條柵桿、主動輪結構和控制模塊組成,2 組定尺寸固定結構相互連接,不可移動結構為階梯狀,便于與可移動結構配合,保證在柵桿間距調節時的準確性。在制作前根據起捕規格確定最大柵桿間距,根據高度設計安裝柵桿,不可移動結構如圖13(a)所示裝有主動輪結構,與遠程控制系統進行連接,用于調節柵桿間距,精度可達0.01 mm;可移動結構由2 組無級可調固定框、多條柵桿和從動輪組成。可移動結構為階梯狀,根據設計需求確定柵桿間距,當無級可調固定框移動至不可移動結構中間位置時為柵桿間距最小位置,裁截一定長度的柵桿使其長度恰好為無級可調式結構之間的垂線距離,保證無級可調結構可以卡在不可移動結構上不滑落,從動輪結構在主動輪的推動下進行運動。
在分級柵間距需要調節時,控制系統向兩級不可移動結構分別發出指令,不可移動結構中的主動輪得到響應后開始轉動,可移動結構中的從動輪結構受主動輪作用開始反向移動。例如當不可移動結構發出順時針旋轉指令時,可移動結構的從動輪隨不可移動結構的主動輪逆時針旋轉,如圖13(c)所示。在間距調整時存在相鄰分級柵間距不一的情況,設計時以間距大的一側為設計間距,當設計間距到達設定間距后主動輪停止運動,分級柵間距調節完畢。
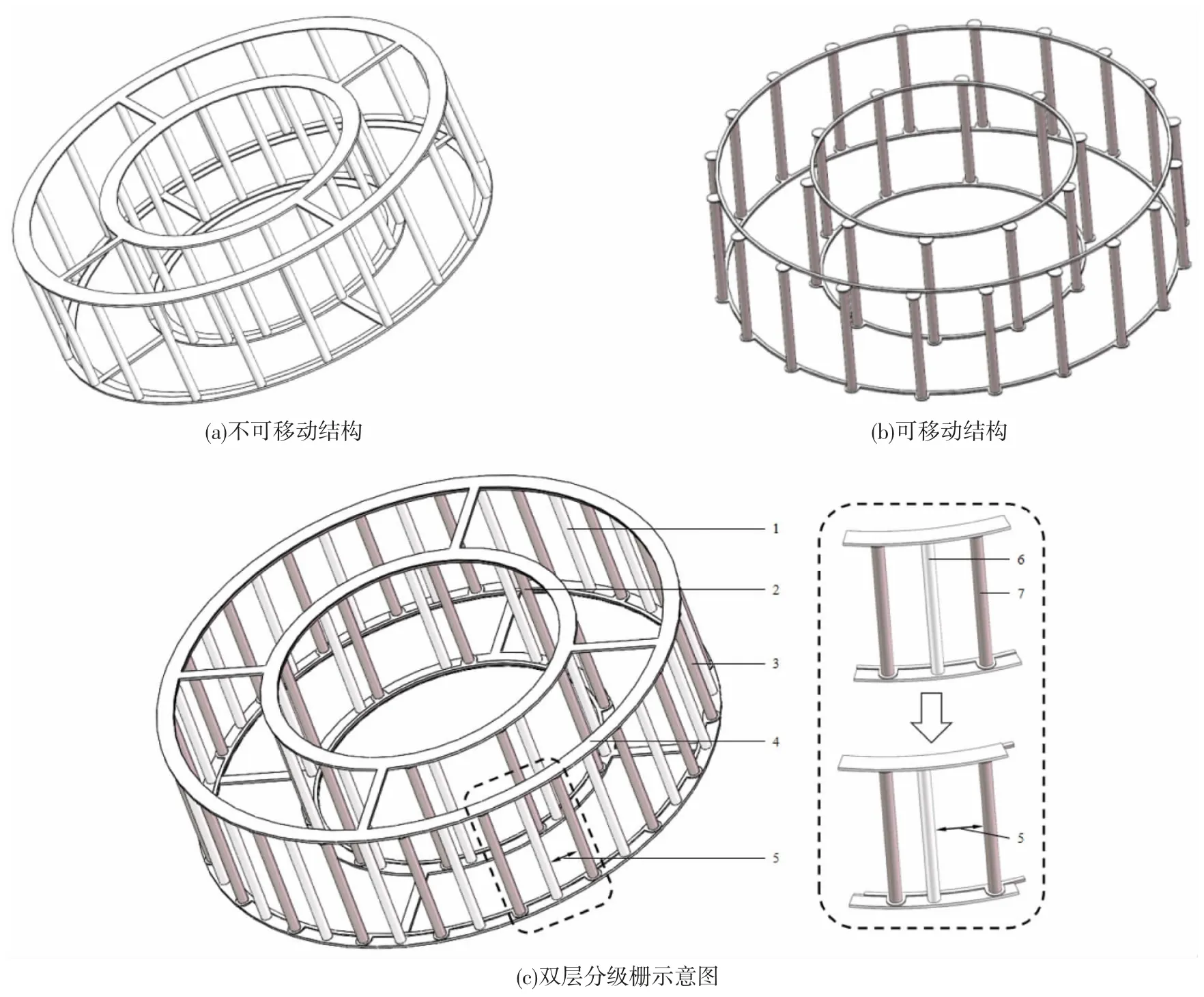
圖13 雙層分級柵設計概念圖Fig.13 Conceptual diagram of double layergrading grid
針對設計的雙層分級柵,為驗證分級柵的性能,設計了實驗室模型進行驗證。在模型設計時簡化結構,設計了長方形單側逃逸驗證分級效果,設計如圖14(c)所示。分級柵設計最大間距為20 mm,主要由不可移動和無級可調式結構組成。不可移動結構由2 塊階梯狀亞克力板材如圖14(a),多條PVC 管(直徑20 mm壁厚2 mm)組成,亞克力板材孔距為62.5 mm。無級可調式結構由2 塊階梯狀亞克力板材如圖14(b),與不可移動結構亞克力板材以中心對稱安裝,多條PVC 管(直徑20 mm 壁厚2 mm)組成,亞克力板材孔距為62.5 mm,PVC 管裁截長度為兩塊亞克力板材之間的垂線距離,保證PVC 管可以恰好卡在不可移動結構上。分級柵只在一個側面設置,其余三面側面和底面進行布網,分級柵采用手動調節,距離通過游標卡尺進行控制,精度為0.1 mm,調節完成后使用4 個長尾夾進行固定。

圖14 雙層分級柵試驗裝置Fig.14 Experimental setup of doublelayer grading grid test device
試驗時,選取體寬17~19 mm 分級區域內的鱸魚80 尾,共進行4 組試驗,每組試驗20 尾魚。分級柵Ⅰ間距為18.0 mm,分級柵Ⅱ間距為17.5 mm,分級柵頂部放置在水面之上5 cm 處,防止魚跳出分級柵。試驗中將魚放入分級區Ⅰ內,讓魚自由游動20 min。試驗完成后,對各區域內的鱸魚數量和體質量、體寬進行統計,結果如圖15 所示。根據試驗結果,80 尾鱸魚中,體寬大于18 mm 小于19 mm 的有38 尾,體寬大于17.5 mm 小于18 mm 的有14 尾,體寬大于17 mm 小于17.5 mm 的有29 尾。試驗結束后分級區Ⅰ內的鱸魚有39 尾,其中體寬大于18 mm 的鱸魚36 尾,體寬小于18 mm 的鱸魚為17.96、17.96、17.99 mm 共3 尾;分級區Ⅱ內的鱸魚有15 尾,其中體寬小于18 mm 大于17.5 mm 的鱸魚10 尾,體寬大于18 mm 的鱸魚為18.05 mm 共1 尾,體寬小于17.5 mm 的鱸魚為17.17、17.25、17.37、17.46 mm 共4 尾;穿過分級柵在暫養桶內自由游動的鱸魚有26 尾,其中體寬小于17.5 mm 的鱸魚24 尾,體寬大于17.5 mm 的鱸魚為17.51、18.37 mm 共2 尾。試驗結果表明,雙層分級結構分級效果較為明顯,可以在短時間內達到分級的效果。在實際應用時分級柵間距只需要對需要起捕尺寸的魚體寬進行測量,分級柵設計小于等于體寬,分級柵Ⅱ的間距應大于分級柵Ⅰ。
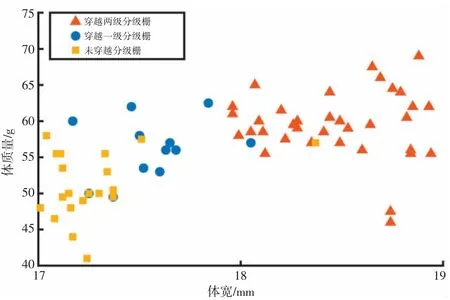
圖15 雙層分級柵試驗結果Fig.15 Test results of doublelayer grading gridtest
4 結論
為解決大水面養殖中缺乏精準起捕設備的問題,本文設計了一套依據魚類的體寬設計分級柵間距進而實現精準捕撈的捕撈設備,通過小尺寸起捕設備開展了魚類體寬與分級柵間距關系的試驗,主要結論如下:
(1)通過實驗室試驗和現場試驗,確定了體寬與分級柵間距之間的關系,對于鱸魚而言分級設計具有可行性,在捕撈時分級柵間距應小于等于體寬。
(2)在分級結構研究的基礎上,設計出無級可調雙層分級結構,并開展了實驗室試驗,試驗結果表明雙層分級結構對鱸魚具有有效性,可以對鱸魚進行單一體寬或區間體寬分級。
本文設計了具有按需、定時、暫養、損傷小功能的起捕設備,主要對起捕設備的分級結構進行了參數設計和試驗,并根據試驗結果對分級結構進行優化,有效解決了分級柵無法篩選單一規格或某一區間規格的魚的難題。但是目前只針對鱸魚進行了研究,以后需要對其他常見魚類進行相關試驗;無級可調雙層分級結構尚未進行大水面養殖環境試驗,下一步將對雙層分級結構的實地海域應用效果進行驗證。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:26:08
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
工業設計(2016年12期)2016-04-16 02:52:00
現代企業(2015年9期)2015-02-28 18:56:50