輪腿式六足智能消防機器人設計研究
2022-08-28 07:44:34蘇毅
現代信息科技 2022年10期
蘇毅
(甘肅建筑職業技術學院,甘肅 蘭州 730050)
0 引 言
隨著科學技術的快速發展,各式各樣的可移動機器人紛紛涌現,用以協助人類不同類型的工作,與我們的生活形成密不可分的關系。在人工智能技術的廣泛應用下,智能機器人發展迅速,廣泛應用于各個領域,按照其功能類型可以分為消防機器人、救援機器人、拆除機器人以及爆破機器人等。
智能化消防機器人融合了多種現代技術,將機械理論、計算機理論、人工智能以及控制技術等應用于消防機器人中,使其具備識別和判斷能力,能夠精準把控災情發展情況。消防機器人能夠在火災發生后第一時間進入火災現場實施救援,從而緩解消防人員緊缺的問題,并且能夠在快速獲取火災現場情況的前提下深入現場,保證后續消防工作者的生命安全。
現階段使用較多的是輪式和履帶式消防機器人,其能夠在較為平坦的地面上快速收集場景內信息,但由于火災現場的環境時時處于動態變化之中,這就增加了消防機器人的移動距離和所需時間,采用上述兩類機器人難以有效收集和整理相關信息。有鑒于此,本文研究輪腿式六足智能消防機器人的設計方法,為消防機器人的移動軌跡進行合理規劃。
1 輪腿式六足智能消防機器人設計方法
1.1 設置輪腿式六足機器人各腿受力參數
根據機器人的構造一般可以分為輪式機器人、履帶式機器人、足式機器人,足式機器人擁有較強的地形適應能力,能夠較差的環境下保持良好的機動性能,即使是在有阻礙物的地面上或是惡劣的自然環境中,其整體性能也會優于輪式機器人或履帶式機器人,擁有更強的越障能力。
將足式結構融入輪式機器人,需要對其腿部的不同位置進行受力點分析和設置,以此完成行進路徑的合理規劃,使其在火災發生時能夠迅速到達指定火點位置,提升消防機器人的綜合性能。對輪腿式六足智能機器人的參數進行設定,具體數值如表1所示。
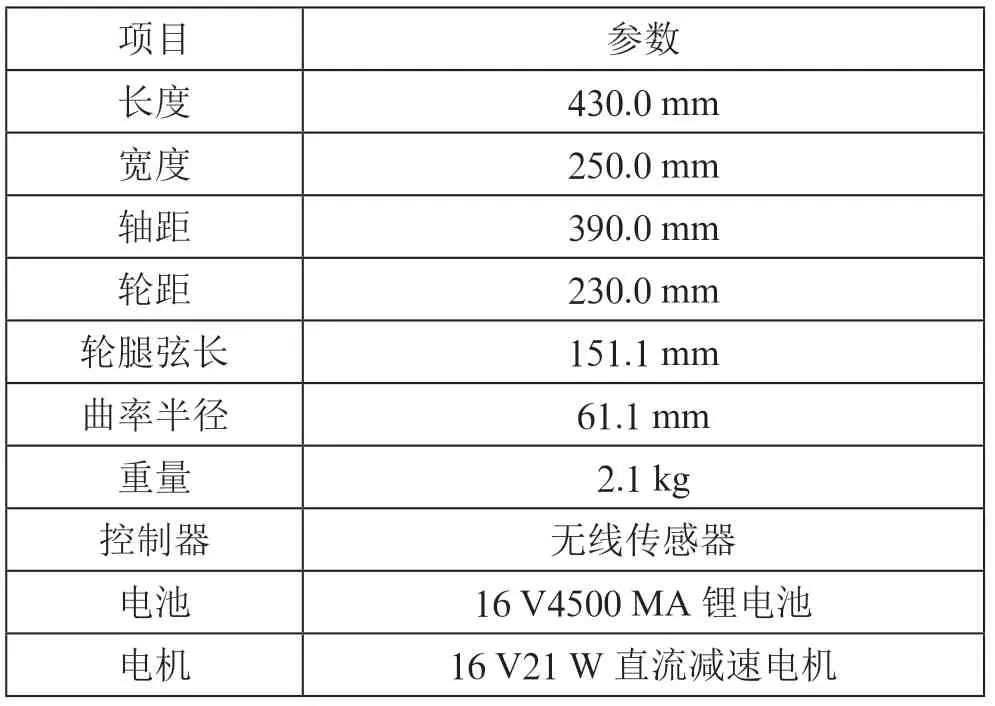
表1 輪腿式六足智能機器人參數
根據表中內容,此次在無線傳感器技術的基礎上,對智能消防機器人的行進軌跡進行定位設計。在其支撐腿末端離開地面時,足端需要一個擺動范圍,根據正向運動學理論,聯系各個關節的情況,定義不同情況下各個腿受力后足端的擺動變換范圍,按照運動學的行進軌跡進行分析,結構設計如圖1所示。
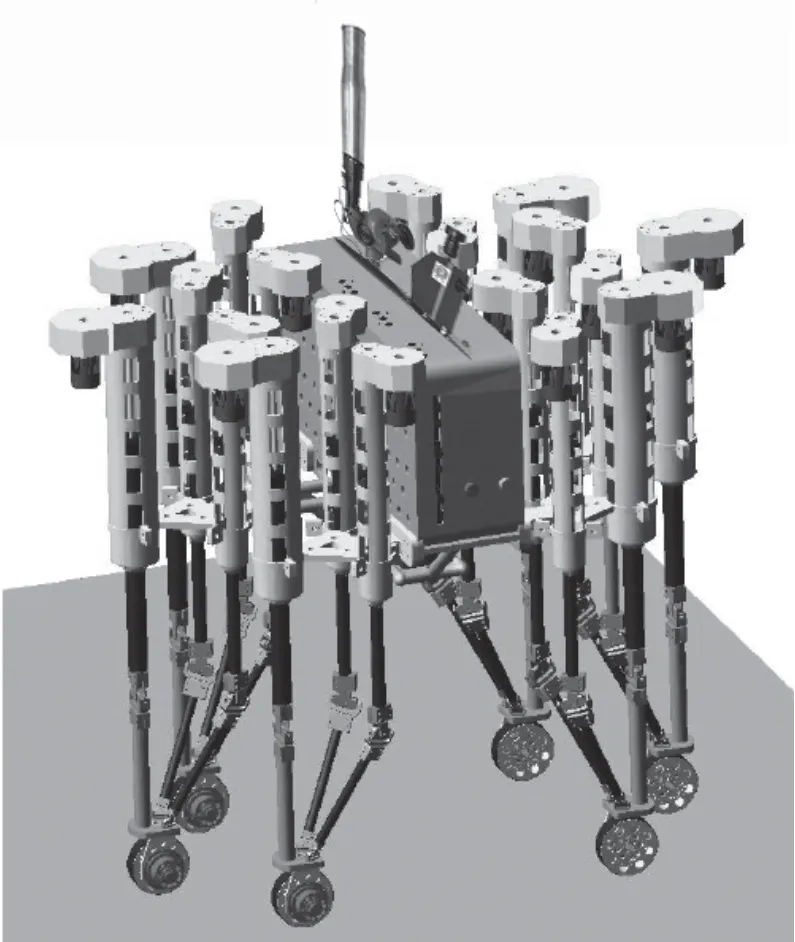
圖1 輪腿式六足智能機器人模擬圖
1.2 正向運動學定義消防機器人擺腿范圍
將消防機器人的單腿和關節與基體連接處,設定為慣性坐標系用來表示,該坐標系的原點為,足端對應的坐標系為工具坐標系用來表示,坐標系的原點為。
分別對機器人的跟關節、髖關節以及膝關節進行標記,在其運動過程中會產生一定的角度位置,表示為、和。
按照正向運動學的理論進行分析,在機器人的對應單腿完全伸展時,表示為位置的初始形態,可以將慣性坐標系和工具坐標系進行轉換。
此時各運動角度取值分別為=0、=0、=0,表達式為:
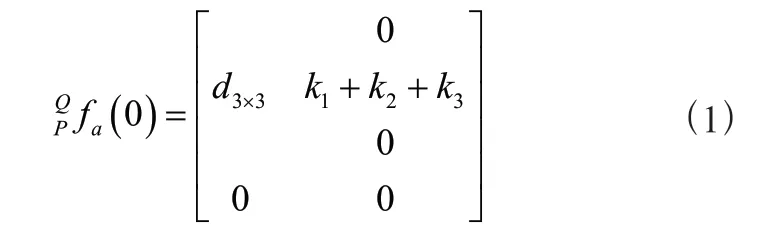
其中,輪腿式六足智能消防機器人的總腿用來表示,機器人的本體位置用來f表示,各個關節處的運動變量在足端慣性坐標系下所處的位置,用f來表示。
基于右手定義規則進行各關節距離設定,跟關節到髖關節的距離用來表示,跟關節到大腿的距離用來表示,跟關節到小腿的距離用來表示。對各個驅動關節的旋轉運動量進行設定,分別為:

其中:關節的旋轉量用來表示。取坐標軸上的對應點位,按照坐標位置進行轉換,表達式為:
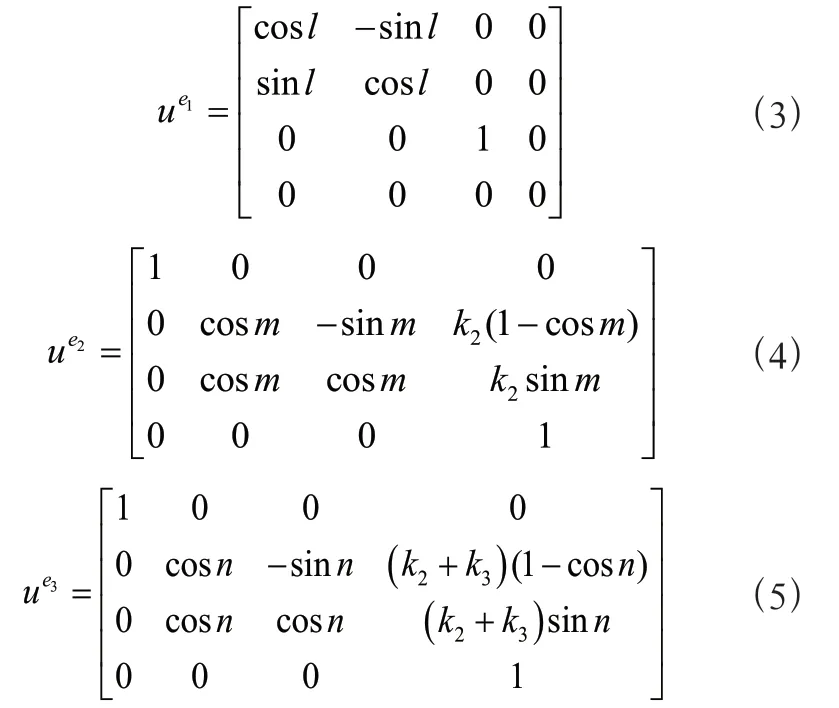
將對應坐標系下跟關節、髖關節、膝關節產生的旋轉量,轉化完成的指數關系數值分別用u、u、u來表示。對不同情況下的各個腿部關節進行坐標轉化,以此確定足部末端的運動軌跡范圍。
在設置輪腿式六足機器人各腿受力點的前提下,根據正向運動學理論定義消防機器人的運動擺腿范圍,完成輪腿式六足智能消防機器人的設計。
2 實驗測試與分析
為驗證所設計機器人的實際應用效果,采用實驗測試的方法進行論證。選擇兩組傳統的機器人進行對比,分別為輪式消防機器人和履帶式消防機器人。
2.1 選擇實驗測試環境
本文設計的六足式智能消防機器人,主要目的是它在路面崎嶇不平的場景中依然能夠實現良好的路徑規劃和選擇性能。對其綜合情況進行測試,以不同垂直高度的樓梯高度作為變量,在MATLAB 測試平臺中擬建實驗測試環境。
此次選擇樓梯作為實驗測試環境,對不同類型的智能消防機器人進行性能測試。本次測試主要分為兩個階段:
(1)測試智能消防機器人的平穩性能,即檢測機器人在爬樓梯的過程中,其重心軌跡是否能保持連貫性,驗證三組機器人行進過程中的穩定性能。
(2)在機器人攀爬樓梯的整個過程中設定火災情況,在樓梯中設置障礙物,以此判斷智能消防機器人是否可以改變行進軌跡,以較快的速度到達終點。
2.2 智能消防機器人重心軌跡變化對比
對擬定的測試項目進行分類,分別模擬常規場景和火災有障礙的場景,測試不同類型智能消防機器人的行進軌跡是否有偏移重心的情況,以及測試在出現路障時機器人是否能改變行進軌跡,迅速到達指定位置進行救援。
將三組智能消防機器人依次連接到測試平臺中,首先按照沒有路障的情況完成行進軌跡,設置擬建的樓梯起始點到終點的距離,水平距離為4 800 mm,垂直高度為1 600 mm。樓梯共包含8 組臺階,對其距離和高度進行平均分配,在指定的起始點和終點連線上進行重心軌跡測試,具體情況如圖2所示。
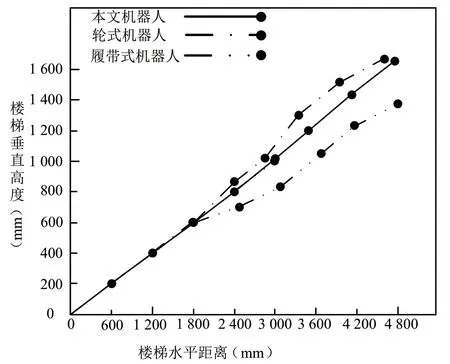
圖2 不同消防機器人重心軌跡變化對比結果
從圖2中可以看出,在此次重心軌跡測試過程中,將三組機器人的初始轉速均設置為π,其與樓梯表面產生的靜摩擦系數為0.6。兩組常規模式下的消防機器人,在攀爬到樓梯中間位置時發生了一段時間的重心停頓現象,且重心軌跡的變化幅度較大,說明上述兩組機器人已經偏離了既定的軌跡線路,其穩定性較差。
從本文設計的機器人來看,其重心軌跡與樓梯的走向相一致,具有良好的攀爬性能,且可以在較為平穩的狀態下完成軌跡行進。綜合實驗結果可知,此次設計的輪腿式六足智能消防機器人,在攀爬樓梯的過程中能夠保持重心軌跡的連貫性,具有實際應用效果。
2.3 智能消防機器人路徑規劃時間對比
為進一步驗證本文機器人的性能,在上述測試完畢后,模擬小型火災場景,即在樓梯終點處模擬火苗燃燒場景,且在火苗燃燒過程中會下落不同大小的障礙物。機器人在遇見火災障礙物時,若能瞬時重新擬定其行進軌跡,即可以保證在較短時間內到達火災發生地點,不會影響救援工作的開展。設置軌跡行進時間在0.15 s 以內均符合救援標準,將三組機器人放置在該環境中,進行軌跡規劃的時間測試,具體情況如表2所示。

表2 不同類型智能消防機器人路徑規劃時間(s)
根據表中的內容,本文設計的輪腿式六足智能消防機器人,在針對障礙物進行軌跡重建時,對路徑的規劃時間平均為0.04 s,符合救援工作標準,且遠低于標準設定極值,而兩組常規化機器人的平均軌跡重建時間分別為0.21 s 和0.36 s,均不能滿足救援工作標準。
實驗結果表明,單純的輪式機器人和履帶式機器人,在崎嶇路況下不能快速地完成軌跡規劃,影響整體救援速度。而本文設計的輪腿式六足機器人,既保留了原有輪式機器人的性能,又提升了其爬坡穩定性,可以快速進行行進軌跡規劃,具有實際應用價值。
3 結 論
本文將消防機器人進行了詳細分類,并在原有輪式機器人的基礎上進行改良,設計了輪腿式六足智能消防機器人。實驗結果表明,本文設計的輪腿式六足機器人在爬坡過程中其重心軌跡與樓梯輪廓相一致,具備良好的穩定性能。對障礙物路段的軌跡重建時間平均為0.04 s,符合救援應用標準。但由于本人的時間有限,在研究過程中所選擇的樣本測量形式較少,所得結果具有一定的偏差性,后續會針對此內容進行更加深入的研究,為智能消防機器人的發展和設計提供理論支持。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
