基于單片機控制的清掃機器人的設計
2022-08-29 12:14:20王自凱劉立群李愛民易多軒徐小韋
物聯網技術 2022年8期
關鍵詞:設計
王自凱,劉立群,李愛民,易多軒,徐小韋
(甘肅農業大學 信息科學技術學院,甘肅 蘭州 730070)
0 引 言
進入21世紀以來,隨著計算機技術、微電子技術和傳感器技術的發展,人們在能實現控制模式的傳統機器中添加了處理器,清掃機器人就是其中之一。然而,無論是在國內還是國外,清潔機器人的價格都偏高。因此,本課題研究設計了一種智能清洗機器人,該機器人能夠進行清洗和避免污染等操作。本項目設計成本較低,人為干擾少,實用性強,可靠性高,有廣闊的發展前景。
1 系統硬件設計
本次設計的智能清掃機器人硬件部分以STC89C52單片機為核心,借助紅外避障模塊檢測外部情況,由風扇驅動模擬清掃過程,按鍵電路作為啟動部分,電機驅動為裝置提供動力,還包括麥克姆輪等其他部分。系統硬件設計如圖1所示。

圖1 系統硬件設計
1.1 按鍵電路設計
此次設計的啟動部分采用按鍵方式。按下按鍵后,電路接通至高電平,開關接通;松開按鍵,電路接通至低電平,開關斷開。在本次設計中,按鍵作為系統的啟動部分,能夠將智能清掃小車與人連接起來,實現對系統的手動輸入。該方式操作簡單,使用便捷,符合本次設計的需要。按鍵電路原理如圖2所示。
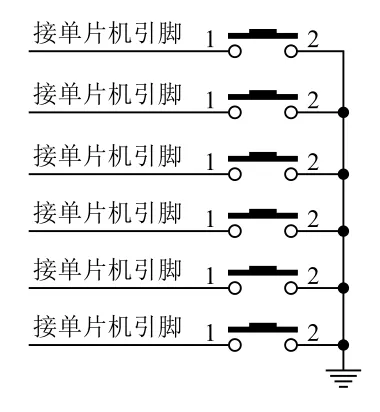
圖2 按鍵電路設計
1.2 BD681風扇驅動電路設計
在清洗方面,風機正常工作需要通過系統內部的能量轉換實現。首先,電能轉化為電磁能,之后再轉化為機械能,最后轉化為動能。由于單片機無法直接控制風扇的發動機,因此我們選擇用大功率三極管進行控制。由于三極管能承受的電流有限,FIM可以防止三極管損壞,故使用限流電阻來限制三極管中的電流。在連接關鍵電路時,三極管連接高電平,風扇驅動電路響應,風扇開始旋轉。電路斷開后,三極管連接至低電平,風扇停止轉動。風扇控制電路如圖3所示。
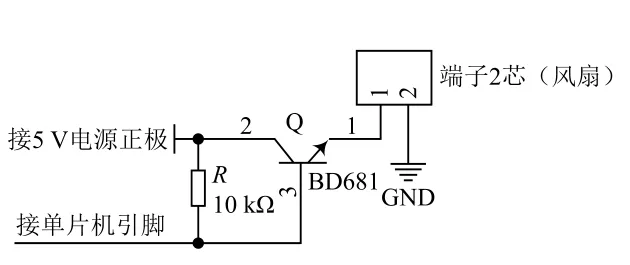
圖3 風扇控制電路
1.3 紅外避障傳感器模塊電路設計
紅外障礙物防護傳感器選擇E18-D80NK-N,它既能發射光束也能接收光束。當傳感器發出紅外光時,遇到物體紅外光會被反射回來,反射的光束被傳感器接收。檢測到反射光后,傳感器將自動計算物體距離。傳感器還可以避免可見光的干擾。傳感器利用透鏡大大增加了傳感器的檢測距離,80 cm范圍內的物體基本都能被檢測到。除此之外,該傳感器還具有價格更低廉、裝配更容易、使用更便捷等特點,符合此次設計的要求。由于光速遠比超聲波傳播速度快,所以紅外線測距在與超聲波測距的對比中優勢明顯,其傳播和反射時間更短,能更快地預警。紅外避障傳感器模塊原理如圖4所示。
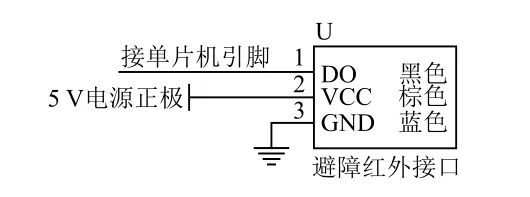
圖4 紅外避障傳感器模塊原理
1.4 L298N電機驅動模塊
選擇的發動機模塊為L298N,它不僅可以驅動兩級發動機,還可以驅動四相發動機,甚至驅動S35,同時也可以接收TTL電平信號。驅動模塊芯片由H雙工橋引擎驅動。CadA H電橋可提供2 A電流。該部分電源范圍為2.5~4.8 V,邏輯部分的電源為5 V,可直接控制DC-DC發動機的轉速和方向。直流發動機為無刷直流發動機,可保證機器人完成相應操作。該發動機能夠很好地滿足清洗機器人的能源需求,最大限度利用能源而不浪費,完全滿足設計要求。電機驅動模塊原理如圖5所示,電機驅動實物如圖6所示。
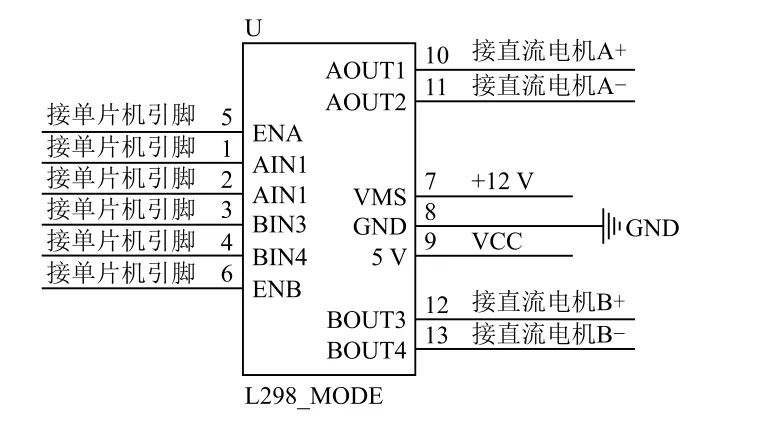
圖5 電機驅動模塊原理
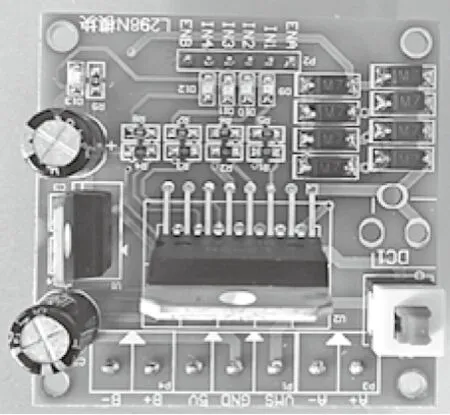
圖6 電機驅動實物
2 系統軟件設計
系統軟件基于Keil編譯環境,采用C語言編程設計。C語言較匯編語言可執性更高,應用過程更加方便,即使編程人員不了解單片機處理器的結構,也可以應用C語言的編輯器完成程序設計。系統初始化后,在單片機的控制下,系統驅動裝置以及風扇驅動電路響應,同時避障傳感器對周圍環境進行檢測,并根據實際情況做出反應。基于Keil的C語言程序設計如圖7所示。
選取2016年1月—2017年12月我院納入的400例白內障行小切口手術治療患者作為研究對象。所有患者均對本次研究知情,自愿參與。為保證研究的科學性,本次研究將合并有嚴重器質性疾病、腫瘤疾病、全身感染性疾病、妊娠或哺乳期女性、有過眼部手術史、精神病史患者排除在外。其中,男235例,女165例;患者年齡為39~82歲,平均年齡(57.09±11.03)歲;晶狀體硬度LOCSⅡ分級:Ⅰ級0例,Ⅱ級129例,Ⅲ級156例,Ⅳ級115例。本次研究符合醫學倫理。
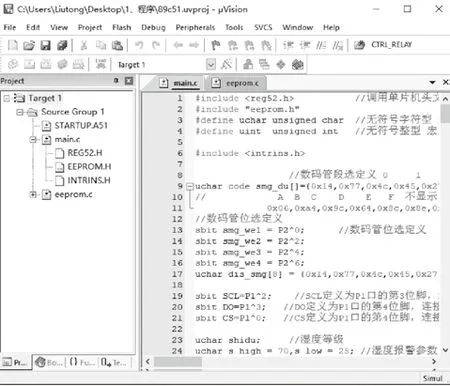
圖7 基于Keil的C語言程序設計
3 系統電路
智能小車電路如圖8所示。
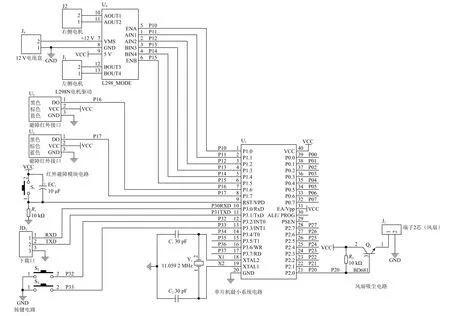
圖8 智能小車電路設計
4 結 語
本次設計的清掃機器人以STC89C52作為控制中樞,芯片編寫程序簡單,系統兼容性好,價格低廉,抗干擾能力強。智能清掃小車采用了軟硬件相結合的方式,使實驗功能更加豐富。測驗結果證明,該設備基本能實現所有預期效果,滿足小車進行智能清掃的需求。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
