集成2R1T并聯機構的艾灸輔療機器人概念設計與運動學分析
2022-08-30 07:51:04刁吉瑞湯騰飛方漢良劉浩陽張俊
福州大學學報(自然科學版) 2022年3期
刁吉瑞,湯騰飛,方漢良,劉浩陽,張俊
(福州大學機械工程及自動化學院,福建 福州 350108)
0 引言
傳統艾灸醫療難點在于治療師需手動操作艾灸罐針對人體特殊部位進行灸法按摩,治療過程中難以準確掌握溫度大小、難以控制艾火以及燃燒煙霧對環境的污染,對醫師的體力也有一定要求[1].目前,國內對艾灸輔療機構的研究大多集中于艾灸盒、艾灸條等裝置,鮮有關注輔療機構的構型創新.
隨著機器人技術的發展,一種串聯形式的艾灸機器人出現在大眾的視野中.戴耀南等[2]以人體背部能夠恒定受溫為目的設計了一種3軸艾灸機器人,可減少因人工操作失誤而帶來的醫療事故.夏世林等[3]提出一種可適用于多關節艾灸輔療的機械臂艾灸器,其以6自由度串聯機構為本體,末端裝載艾灸器,通過結合溫度控制系統解決了艾灸控溫、定位、多角度治療等難題.樂文輝等[4]基于機器人技術研發了一種4自由度串聯機器人,基于D-H法驗證了該機構的可行性,證明其可在簡單位型下進行動作順暢的醫療作業.然而,現有這類串聯式艾灸機器人存在成本過高、運動形式單一的不足,難以滿足艾灸輔療流程對器械運動形式與工作空間的需求[5-6].在并聯機構基礎上通過集成串聯機構搭建的混聯機構,以高精度、小慣性、大承載能力及高剛度等潛在優勢,被廣泛用于航天、醫療、工業、農業等領域[7-11].其中,具有2R1T(兩轉動一平動)運動形式的少自由度并聯機器人以靈巧性高、成本低、結構簡單等優點成為諸多學者研究和探索的熱點[12-16].以作者所見,尚未有將混聯構型與艾灸輔療結合的設計與應用實例.
為將混聯機構應用于實際艾灸輔療的基礎作業,設計一種5自由度混聯機器人機構,其并聯模塊構型為2UPS&1UPR&1UP,串聯模塊為2R(兩轉動)轉頭.以該混聯機器人機構為研究對象,將從以下4個方面展開研究:
1) 運用螺旋理論分析2UPS&1UPR&1UP并聯模塊的自由度數目,確定機構具有2R1T的運動特性;
2) 推導運動學逆解表達式,建立全局雅克比矩陣并分析該機構奇異位型;
3) 通過“分層切片”的搜索原理預估機構工作空間;
4) 開展樣機實驗,檢驗上述理論分析的正確性.
1 概念設計與坐標系建立
如圖1所示,艾灸輔療機器人機構的并聯模塊分別由靜平臺、動平臺、兩條UPS支鏈、一條UPR支鏈和一條UP支鏈,串聯模塊是一個2自由度轉頭,用于放置艾灸盒.4條支鏈以炭纖維桿為主要承力構件,實現輕量化設計.其中,2條UPS支鏈呈對稱分布,虎克鉸(U)與靜平臺相連接,球副(S)與動平臺相連接,移動副(P)的軸線分別通過虎克鉸的中心點和球副的中心點,并且與U鉸的兩條轉動軸組成的平面垂直.UPR支鏈中的U鉸與靜平臺相連接,P副的軸線通過U鉸中心點并與U鉸的兩條轉軸組成的平面垂直.其中U鉸的第一轉軸與R副軸線平行.UP支鏈中的U鉸與靜平臺相連接,P副的軸線經過U鉸的中心點并且與兩條轉動軸線組成的平面垂直.第i(i=1,2,3)分支上與靜平臺相連接的U鉸的中心點為Ai,第i分支上與動平臺相連接的S副的中心點為Bi(i=2,3).B1是UPR支鏈中的轉動副軸線的中心點.
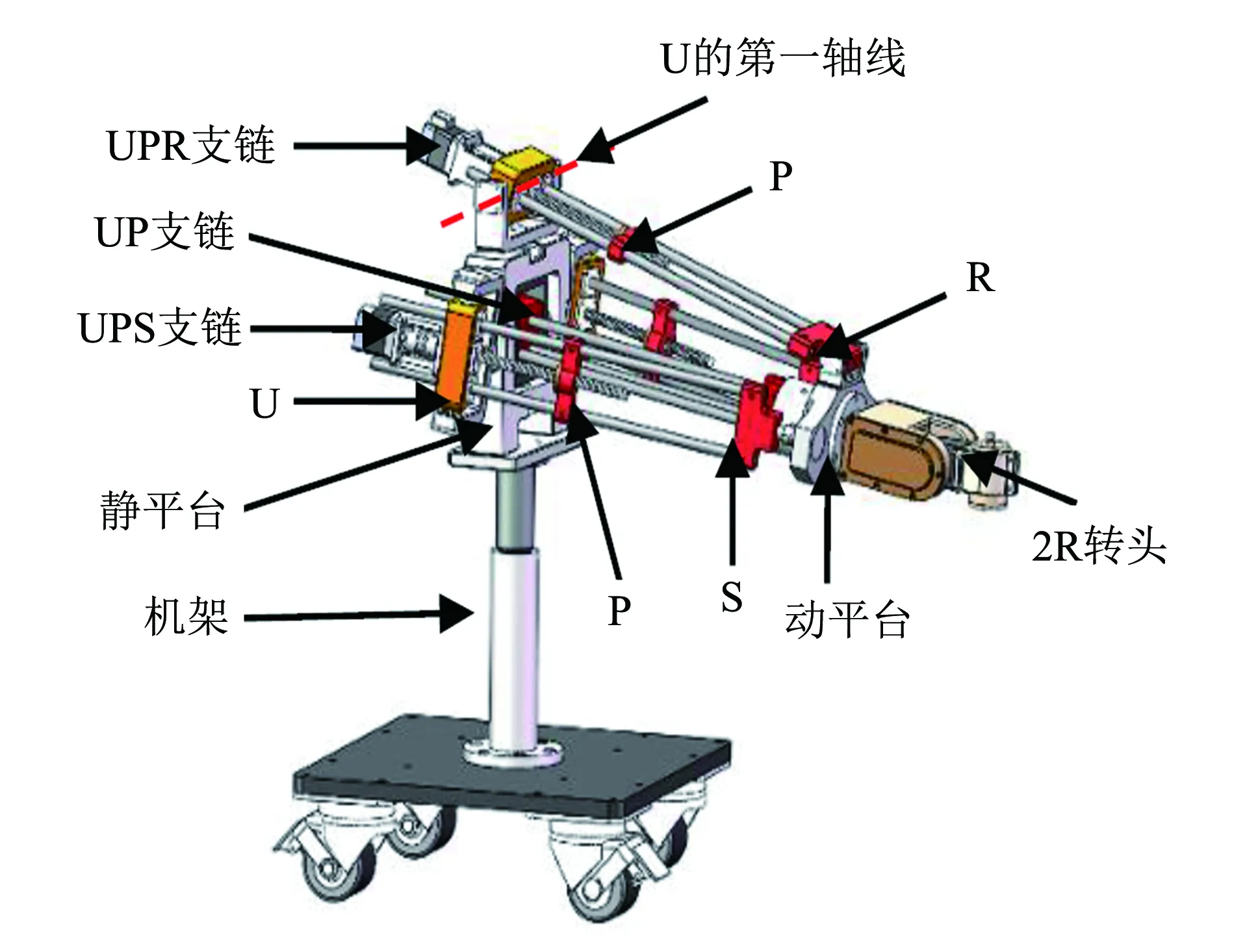
圖1 2UPS&1UPR&1UP機構模型Fig.1 2UPS&1UPR&1UP mechanical model
綜上所述,此概念設計可以實現整機及其各部件的模塊化設計,以便根據不同艾灸輔療方案需求快速重組機構,大大提高了該輔療機器人在實際應用中的靈活性與可操作性.
建立如圖2所示的靜平臺坐標系O-xyz、動平臺坐標系O′-uvw、第一轉頭坐標系O′-x1y1z1和第二轉頭坐標系O″-x2y2z2.
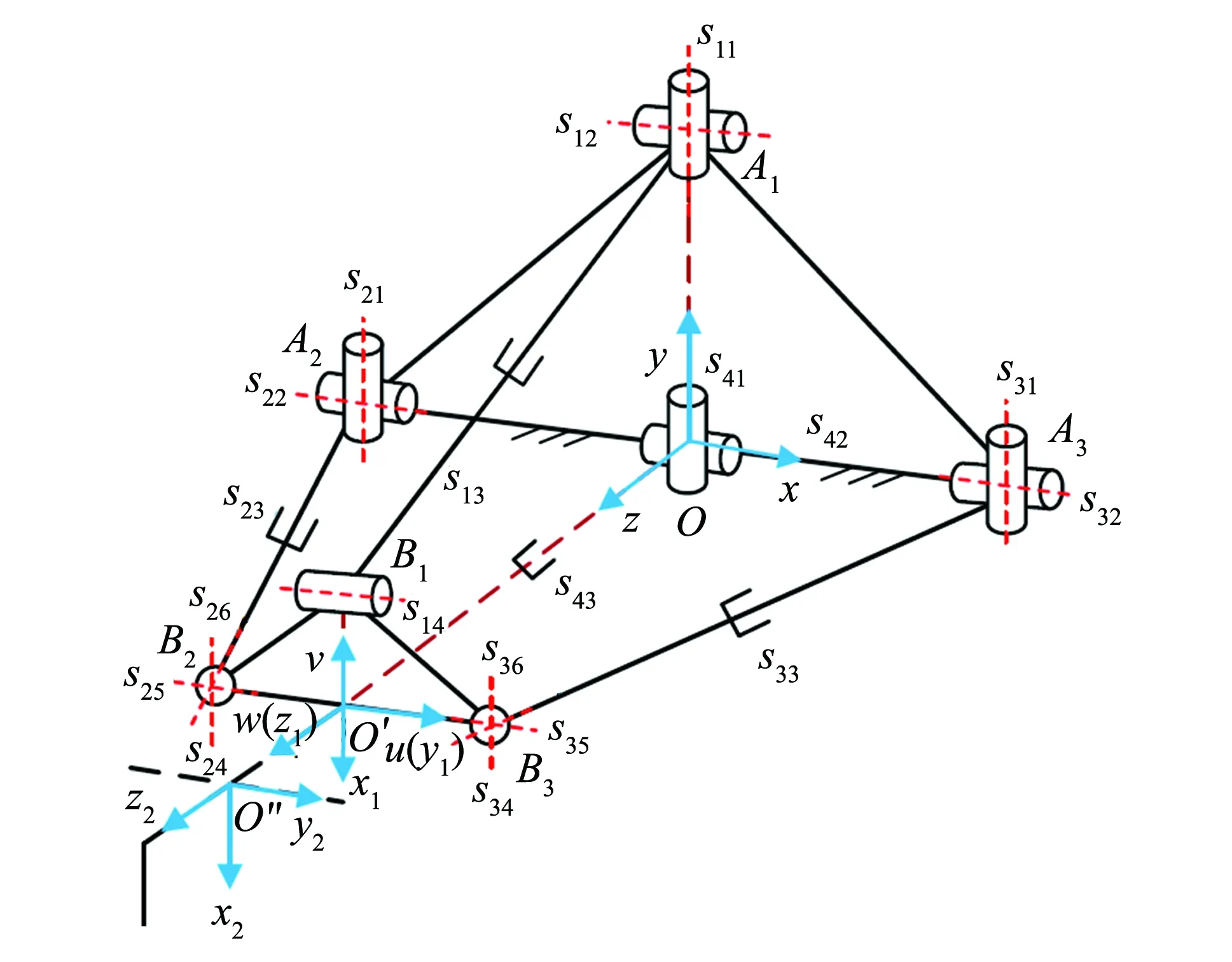
圖2 2UPS&1UPR&1UP機構簡圖Fig.2 2UPS&1UPR&1UP schematic diagram of mechanism
圖2中,原點O是A2A3的中心,x軸與A2A3共線,y軸與A2A3垂直,z軸方向向下.原點O′是B2B3的中點,u軸與B2B3共線,v軸與B2B3垂直,w軸方向向下.對于第一轉頭坐標系,z1軸與第一轉頭軸線重合,即與w軸重合,y1軸與第二轉頭軸線平行,x1軸滿足右手定則.對于第二轉頭坐標系,O″為第一轉頭軸線與第二轉頭軸線的交點,y2軸與第二轉頭軸線重合,x2軸與艾灸條的方向平行,z2滿足右手定則.ΔA1A2A3和ΔB1B2B3皆為等腰三角形.記sij為坐標系O-xyz下第i支鏈中第j個運動副的單位方向矢量.
2 運動學分析
2.1 自由度分析
根據圖2所示并聯機構的關節特征,并聯模塊的運動副向量的約束條件為:

(1)
任意位姿下,UPR支鏈的運動螺旋系可表示為:

(2)
式中:rU1和rR1分別表示此支鏈中U副和R副的幾何中心點在靜坐標系下的位置矢量.
基于螺旋理論可求得該支鏈約束螺旋系為:

(3)

同理,支鏈2即UPS支鏈的運動螺旋系為:

(4)
由互易螺旋理論可知,支鏈2、3不存在約束螺旋.對于恰約束從動支鏈即UP分支,在任意位姿下其運動螺旋系可表示為:

(5)
對式(5)求反螺旋可得:

(6)
綜合式(3)和式(6),可求得動平臺的運動螺旋系為:

(7)
2.2 并聯模塊位置逆解
2UPS&1UPR&1UP并聯機構的位置逆解分析是指已知動平臺的姿態,求解3個分支移動副位移qi的過程.利用歐拉角φ、θ、ψ分別表示動平臺繞z、y、x軸的3個姿態角,則動平臺坐標系O′-uvw相對于靜平臺坐標系O-xyz的姿態轉換矩陣可表示為:

(8)
由并聯模塊各關節之間的約束關系可知:
si1·s14=0 (i=1,2,3),s14·rO′=0,s34·rO′=0
(9)

(10)
式中:rO′表示動平臺坐標系原點O′在靜平臺坐標系下的位置矢量.
將rO′,si1和s14代入到式(9),可得并聯模塊的運動約束條件為:
φ=0,xO′=zO′tanθ,yO′=-zO′tanψsecθ
(11)
令ai表示在靜平臺坐標系O-xyz下Ai的位置矢量,bi表示在動平臺坐標系O′-uvw下Bi的位置矢量,la和lb分別表示靜平臺和動平臺各關節點到各對應坐標系原點的距離.上述矢量可表示為:
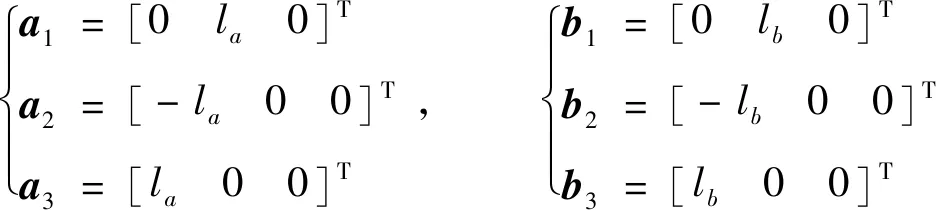
(12)
根據圖2可知,機構的閉環矢量方程為:
qi+ai=rO′+R·bi(i=1,2,3)
(13)
則3個分支移動副的位移qi以及其單位方向矢量wi可表示為:

(14)
2.3 串聯模塊位置逆解
令第二轉頭坐標系O′′-x2y2z2相對于第一轉頭坐標系O′-x1y1z1的姿態轉換矩陣為Ry2(θ2),第一轉頭坐標系O′-x1y1z1相對于動平臺坐標系O′-uvw的姿態轉換矩陣為Rz1(θ1),則第二轉頭坐標系O′′-x2y2z2相對于動平臺的坐標系O′-uvw的姿態轉換矩陣R1為:

(15)
第二轉頭坐標系O″-x2y2z2相對于靜平臺的坐標系O-xyz的姿態轉換矩陣R2為:

(16)
機構的末端點在靜平臺坐標系下的單位方向矢量可表示為:

(17)
簡化式(17),可得到以下3個方程:
sinψsinθ1sinθ2+cosψcosθ2=xB0Psinθ+zB0Pcosθ
(18)
cosψsinθ1sinθ2-sinψcosθ2=yB0P
(19)
cosθ1sinθ2=xB0Pcosθ-zB0Psinθ
(20)
機構末端點的位置坐標在動平臺坐標系下可表示為:
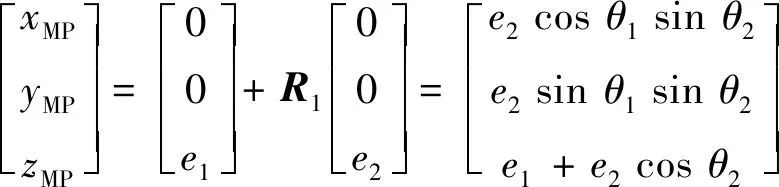
(21)
式中:e1表示第一轉頭坐標系原點與第二轉頭坐標系原點之間的距離;e2表示末端點與第二轉頭坐標系原點之間的距離.
此外,末端點的位置坐標在靜平臺坐標系下可表示為:

(22)
簡化式(22)可得到:
xMPcosθ-zMPsinθ=e2cosθ1sinθ2
(23)
yMP=e2yB0P-e1sinψ-zO′tanψsecθ
(24)
zBP+e2sinθ(xB0Pcosθ-zB0Psinθ)-e2(xB0Psinθ+zB0Pcosθ) cosθ=zO′+e1cosθcosψ
(25)
聯立式(18)~(25),在已知xB0P、yB0P、zB0P和xBP、yBP、zBP的情況下,分別給出zO′、θ、ψ、θ1、θ2的解析表達式,具體如下:
(26)

(27)
式中:
3 奇異性分析
在進行艾灸醫療作業的過程中不允許機器出現奇異位姿.因此,在將該并聯機構用于實際艾灸輔療之前需通過計算分析來預估機構的奇異位型.
為便于表述,不妨在動平臺坐標系原點建立瞬時參考坐標系O′-x′y′z′,其3個坐標軸方向均與靜坐標系3軸方向保持一致.同時,令vO′和wO′分別代表在瞬時參考坐標系下點O′的線速度和動平臺的角速度,則動平臺上Bi(i=1,2,3)的速度矢量可表示為:
vBi=vO′+wO′×(R·bi) (i=1,2,3)
(28)
此外,各支鏈移動副的線速度為:

(29)
將式(28)代入到式(29)中,并改寫成矩陣形式為:

(30)
式中:Ja為3 × 6的驅動雅克比矩陣,表示動平臺線速度和角速度與各支鏈移動副的線速度之間的映射關系.
在瞬時參考坐標系O′-x′y′z′下,動平臺中心點O′瞬時速度可表示為:

(31)

由式(3)和式(6)可知,4條支鏈在系O′-x′y′z′下的約束螺旋系為:

(32)
將式(32)代入到式(31)中作互易積,并將結果改寫為矩陣形式:
(33)
式中:Jc為3 × 6的約束雅克比矩陣,代表支鏈UPR和支鏈UP對動平臺施加的約束力和約束力偶.
故全局雅克比矩陣可表示為:
J=[JaJc]T
(34)
該并聯機構的奇異性分析可分為兩種類型:約束奇異和結構奇異.因約束雅克比矩陣Jc中每一行皆線性無關,故其秩為3,則該并聯機構不存在約束奇異.當驅動雅克比矩陣Ja的秩小于3亦或全局雅克比矩陣J的秩小于6時,機構存在結構奇異,即當機構處于如下狀態時發生結構奇異:1) 3個支鏈的移動副共面,如圖3(a)所示;2) 支鏈1或支鏈2平行于動平臺,如圖3(b)所示.

圖3 并聯機構的奇異位姿Fig.3 Singular position of parallel mechanism
通過合理設置機構尺度參數和s43⊥s22、s43⊥s32的約束條件,可以消除該并聯機構的結構奇異位姿.
4 工作空間
少自由度混聯機器人工作空間是指機構末端執行器的運動區域,是反映其定位能力的重要性能指標之一.根據上述虛擬樣機的設計,并綜合各支鏈絲桿的行程以及各關節轉角的限制,可確定該艾灸輔療機器人的基本尺度參數,如表1所示.表1中,qmin和qmax分別表示并聯模塊移動副長度qi的最小值和最大值;θS1、θS2、θS3分別表示S副關節3個轉軸的轉角,θU11、θU12(θU21、θU22)分別表示支鏈1(2)中U副關節的兩個轉軸的轉角.θR表示的是R副關節軸線的轉角.

表1 并聯機構的尺度參數Tab.1 Dimensional parameters of parallel mechanism
采用“分層切片”的搜索思想來實現工作空間的求解,計算方法詳見文獻[17].經計算可得,該艾灸機器人的姿態工作空間如圖4所示.進一步觀察,由圖4(c)和圖4(d)可知,該并聯機構在ψ=0° 和θ=0° 處可取得沿ψ、θ軸的最大工作截面,并且轉角空間范圍分別為[-43°,39°]和[-32°,32°],z向位置空間則在[160 mm,300 mm]區間內.此外,從姿態空間圖中可明顯看出,機構在z=190 mm處具有最大橫截面,且隨著z值不斷增大,角ψ和θ的邊界先增大而后逐漸縮小.從圖4(b)或圖4(c)中還可看出,該混聯機床的可達工作空間以θ=0°截面呈對稱分布,這與機構構型呈UPR支鏈對稱分布的特點相吻合.并且注意到當z趨于最小值160 mm和最大值300 mm時,機構的角度運動空間范圍極大縮小,故該艾灸機構在進行輔療作業時應盡量避免將艾灸盒運動至工作空間的極點處.

圖4 并聯機構的工作空間Fig.4 Workspace of parallel mechanism
5 實驗結果與分析
為了驗證上述理論分析的正確性,基于3D打印技術搭建了艾灸輔療機器人的模型樣機,如圖5所示.該樣機主要包括機器人本體、機架和控制系統.其中,機器人的各關節采用PLA(聚乳酸)通過3D打印機打印制造,支鏈體則采用碳纖維桿材料,機架作為載體,選擇鋁型材搭建;控制器采用研為八軸運動控制卡,并聯模塊采用42BYGH34型步進電機,串聯模塊采用28BYG30-7A型步進電機,驅動器與相應電機型號配套.

圖5 艾灸輔療機器人物理樣機Fig.5 Physical prototype of moxibustion auxiliary therapy robot
為驗證工作空間算法計算的準確性,將樣機沿著z、x、y軸3個方向運動到如表2所示的關節極限位置,測量UP支鏈在動靜平臺間的長度以及與靜平臺之間的夾角,并整合測量數據.

表2 樣機工作空間邊界點Tab.2 Workspace boundary points of the prototype
為驗證樣機的運動自由度,以UP支鏈體平行于樣機支架和二自由度轉頭處于相對水平為初始姿態,通過PC模塊控制,使得樣機動平臺中心點分別沿著z、x、y軸3個既定方向運動,結果如圖6所示.該結果與前述的自由度分析結果一致,驗證了樣機的3自由度形式.
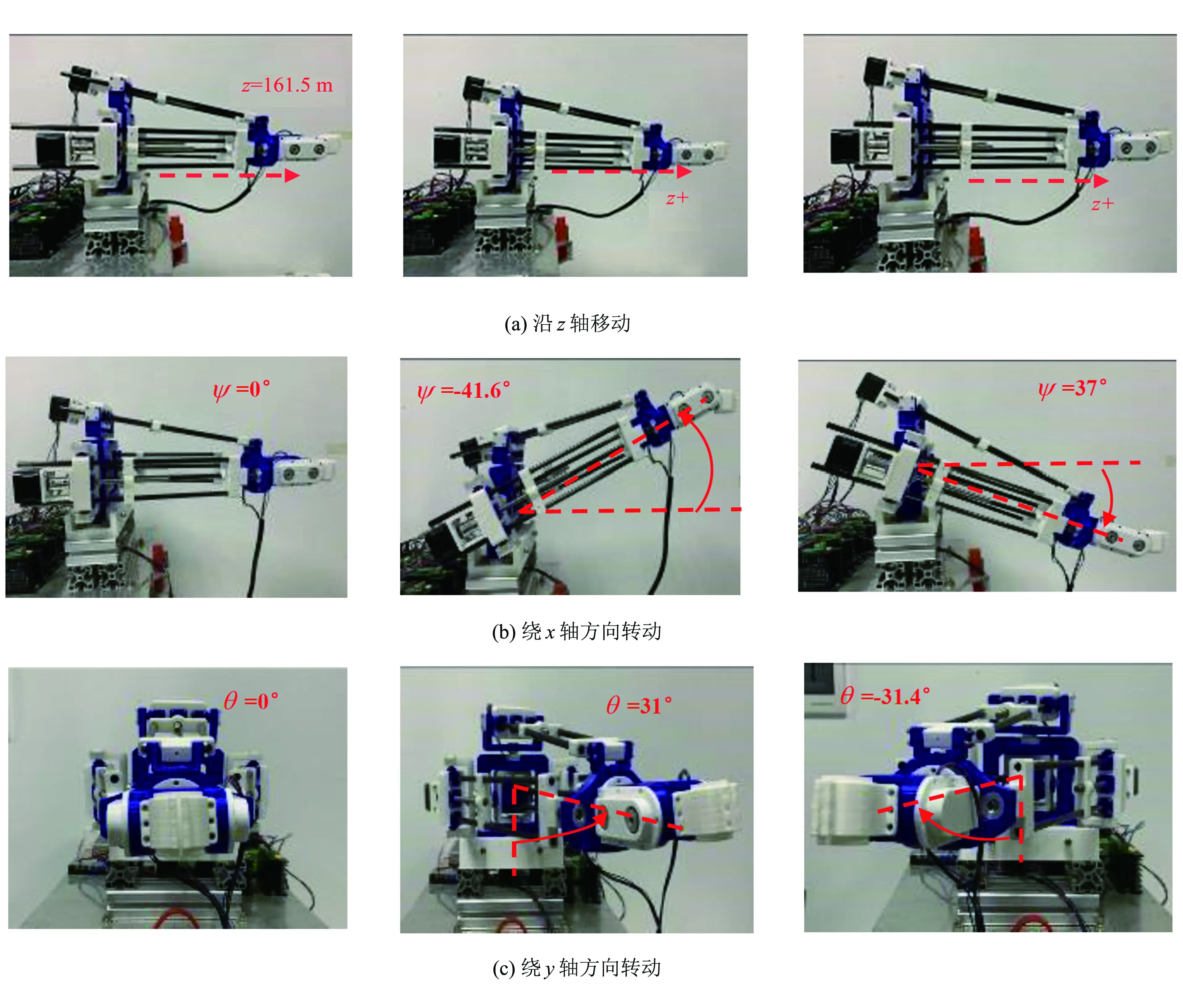
圖6 樣機的不同位姿Fig.6 Different position of parallel mechanism
由上述實驗結果可知,并聯模塊樣機在可達工作空間內,x軸轉角在[-41.6°,37°]之間,y軸轉角在[-31.4°,31°]之間.這一轉角范圍,進一步驗證了機構工作空間呈y軸對稱分布的特點,也表明其可以滿足艾灸輔療對大擺角運動的需求.此外,樣機末端中心點在保持ψ=0°和θ=0°的姿態下時,沿z軸方向的移動距離最低可至161.5 mm,與圖4預估的工作空間分布基本一致,說明了在確定機構的尺寸參數后該工作空間算法的精確性.
注意到表2所示實測值與理論值之間存在偏差.造成這一偏差的原因是:樣機在制造過程中采用的是3D打印技術,制造出的部件存在微小變形,并且在裝配過程中關節間隙的大小存在不確定性,從而影響了機構的實際尺度參數.而在艾灸概念醫療中,這些微小誤差造成的影響可忽略不計.
6 結語
1) 設計一種以2UPS&1UPR&1UP并聯機構和2R轉頭組成的五自由度混聯艾灸輔療機器人.該混聯機構能夠實現空間z向移動及繞x、y轉軸的轉動,可實現多姿態的艾灸輔療.
2) 基于螺旋理論分析并聯模塊2R1T的運動特性,以閉環矢量方程和串并聯姿態轉換矩陣求得艾灸輔療機器人的運動學位置逆解.
3) 通過分析機構動平臺的線速度與角速度求得全局雅克比矩陣,基于此矩陣明確了并聯機構的奇異位姿.結果表明,該混聯機器人不存在約束奇異,存在的兩種結構奇異位型可通過拓撲構結構的約束避免.
4) 利用“分層切片”的搜索原理預估了艾灸輔療機器人的位置工作空間.經分析可知該輔療機器人具有較大轉角,且工作空間呈θ=0°截面對稱,與機構構型關于UPS支鏈對稱的形式相吻合.
5) 基于3D打印技術搭建該混聯機器人機構的物理樣機,通過運動實驗驗證了上述運動學分析與工作空間預估的正確性.
