北斗定位和ZigBee通信的運動軌跡監測方法
2022-08-30 02:39:36陳昌鑫
科技創新與應用 2022年23期
陳昌鑫,趙 亮,謝 冰
(1.中北大學 省部共建動態測試技術國家重點實驗室,太原 030051;2.中北大學 電氣與控制工程學院,太原 030051;3.河南警察學院 網絡安全系,鄭州450046)
隨著工業自動化、智能化的不斷發展,自動化裝置的研究不斷提高了效率,給生產生活帶來了便利。在一些火災救援現場,傳統人工拋射滅火彈、救生索及消防器材的方法具有隨機性,往往依靠人的經驗,因人而異。近年來,自動化發射裝置逐漸取代了傳統人工發射的方法,滅火炮等自動化發射裝置可以根據建模計算來實現物體的定點投射[1],極大提高了救援效率,為了驗證和優化自動化發射裝置建模的準確性和可靠性,需要對發射出的物體進行軌跡監測,對實際軌跡與理論值進行對照實驗。
目前,運動體軌跡監測的方法已有大量研究,曾維棋[2]研究了基于FMCW雷達的高精度測距定位算法,通過測量回波信號和發射信號的頻差來實現測距,并通過算法改進提高了定位精度。王寧等[3]研究了基于毫米波感知的小型無源物體定位追蹤,利用毫米波敏感性強的特點感知物體移動,通過反射信號的頻譜變化實現定位追蹤。魏大為[4]研究了基于CCD傳感器視覺圖像定位方法,通過對圖像的灰度形態算法、邊緣監測算法等分析,實現對平衡環位置的定位監測。陳順超[5]研究了一種基于ZigBee網絡的運動物體定位追蹤,研究了基于信號強度值測距的方法及模型的建立。楊春暉等[6]研究了基于超聲波目標定位與追蹤系統在機器人中的應用,通過超聲波測距原理和三邊測量法建立了超聲波定位系統。田會[7]研究了基于光幕陣列的變速曲線彈道彈丸飛行參數測量方法,依據勻速直線運動彈丸穿過不同光幕的時間建立直線運動方程,解算出彈丸空間的著靶坐標和飛行速度矢量。
本文針對運動物體的運動軌跡監測問題,研究一種基于北斗定位和ZigBee的運動物體位置監測方法,實現運動物體軌跡的實時監測與繪制。
1 系統結構組成與工作流程
北斗定位和ZigBee的運動物體位置監測系統主要包含北斗定位信號發送模塊、上位機遠程監測模塊2部分。北斗定位信號發送模塊包括北斗信號接收模塊、主控芯片和ZigBee模塊A,北斗信號接收模塊通過引出天線用于接收北斗衛星信號,北斗信號接收模塊通過串口與主控芯片連接,主控芯片通過另一串口與ZigBee模塊A連接,主控芯片采用STM32F103系列單片機,該單片機具有多個串口。上位機遠程監測模塊包括ZigBee模塊B和上位機,ZigBee模塊B與Zig-Bee模塊A通過無線連接,ZigBee模塊B和上位機通過串口連接,總體結構如圖1所示。

圖1 總體結構設計圖
主要工作流程為北斗定位模塊接收北斗衛星的數據,后將信號由串口發送到主控芯片進行存儲與解算處理,將處理后的信息通過ZigBee無線模塊A,發送到ZigBee無線模塊B,再由ZigBee無線模塊B發送到上位機軟件進行處理與顯示,達到監測的目的。系統整體工作流程如圖2所示。
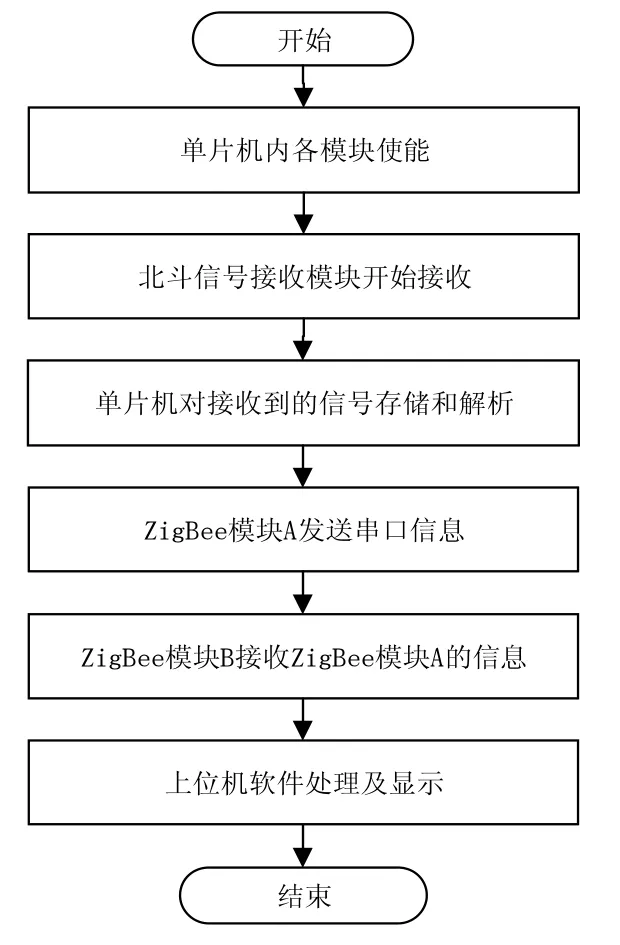
圖2 系統整體工作流程圖
2 硬件結構設計
2.1 北斗信號接收模塊
北斗導航系統是我國自主研發的衛星系統,可以實現短報文通信、精密授時和快速定位等服務[8]。為了實現運動軌跡的實時監測與繪制,對北斗信號接收模塊的刷新率提出了較高要求,監測系統要求采用20 Hz刷新率的北斗信號接收模塊,每隔0.05 s接收一次定位數據和時間數據,可以將接收到的信息傳輸到主控芯片Flash進行信號存儲,同時用另一串口發送到Zig-Bee模塊。
北斗信號接收模塊采用NMEA0183協議接收信息,NMEA0183協議采用ASCII碼來傳遞定位信息、地面速度、衛星信息和當前時間信息等多種信息[9]。北斗信號接收模塊選用S1216F8-BD,S1216F8-BD是最先進的全球導航系統接收器,該芯片模塊包含V8內部定位引擎,具有高靈敏度、低功耗等特點。
北斗信號接收模塊通過串口與單片機進行連接,其連接電路如圖3所示,其中除串口通信外,可以根據需求選擇性使用PPS脈沖輸出腳。
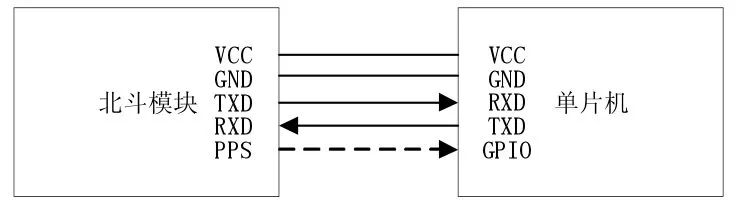
圖3 北斗信號接收模塊與單片機硬件連接圖
北斗信號接收模塊通過單片機軟件程序解析其接收到的NMEA0183數據信息,也可以通過SkyTraq改變模塊的串口波特率、輸出頻率及PPS輸出脈沖。北斗信號接收模塊輸出頻率的配置軟件流程如圖4所示。

圖4 北斗信號接收模塊輸出頻率的配置軟件流程圖
2.2 ZigBee遠程傳輸模塊
ZigBee是一種低速率、低成本、近距離的無線網絡傳輸技術[10],ZigBee一般可以實現節點間400 m及以上距離的傳輸[11]。ZigBee遠程傳輸模塊的設計既可以采用點對點的遠程無線傳輸方式,也可以采用廣播的無線傳輸模式,采用的主要芯片為CC2530的集成模塊。通過設置相同的波特率和頻道,設置主從機模式,實現遠距離無線傳輸。
單片機通過串口與ZigBee模塊進行通信,通過CC2530芯片集成模塊實現串口信息的透傳,單片機串口工作的主要軟件流程圖如圖5所示。
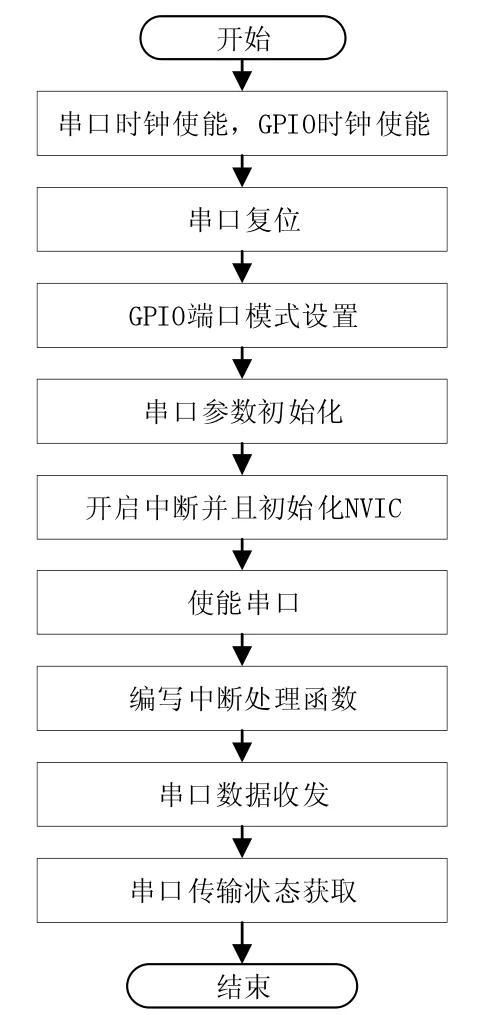
圖5 單片機串口工作的主要軟件流程圖
2.3 電源供電電路設計
單片機、北斗信號接收模塊、ZigBee模塊的主要工作電壓均為3.3 V,通過采用穩壓模塊集成濾波電路實現供電電路的穩定工作。供電電路結構圖如圖6所示。
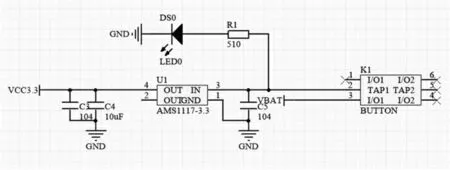
圖6 供電電路結構圖
3 實驗測試驗證
搭建符合電路圖的實物模型,單片機與ZigBee模塊通過串口1連接,單片機與北斗信號接收模塊通過串口3連接,將串口3接收到的信號進行處理可以通過串口1進行轉發,實物模型圖如圖7所示,北斗信號接收模塊連接天線接收信號,該電路連接可以實現穩定正常工作,測試時可以通過LCD進行顯示實時定位信息。

圖7 實物模型圖
使用無人機裝載該模型進行運動,實現物體運動定位測試,實時接收報文如圖8所示,通過分析報文實時時間,可以看出每隔0.05 s可以接收一次報文信息,$GNGGA為北斗定位信息。

圖8 20 Hz物體運動報文信息圖
通過上位機軟件,可以得到實時定位信息,如圖9所示,其中時間為UTC時間。

圖9 實時定位信息圖
上位機軟件對運動過的定位進行記錄,繪制出軌跡散點圖,3次環形車道軌跡散點圖如圖10所示,通過對軌跡點擬合曲線,實現軌跡的繪制。

圖10 實測運動軌跡散點圖
4 結束語
通過設計基于北斗定位和ZigBee的運動物體位置監測系統,20 Hz刷新率的實時定位信號接收和ZigBee信號傳輸,實現了物體位置的定位及運動物體軌跡監測,為運動物體運動軌跡建模仿真提供了一種實驗驗證方法。該定位方法一般應用于室外環境,具有低功耗、低成本等特點,依靠北斗系統的高性能實現精準定位,應用于運動物體的軌跡校準,對運動物體的控制和監測具有良好的應用前景。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00