超構(gòu)表面在三維成像與顯示技術(shù)中的應(yīng)用
2022-08-31 07:00:10池漢彬段輝高胡躍強(qiáng)
光學(xué)精密工程 2022年15期
關(guān)鍵詞:深度
池漢彬,段輝高,3,胡躍強(qiáng),2*
(1.湖南大學(xué) 機(jī)械與運(yùn)載工程學(xué)院 國(guó)家高效磨削工程技術(shù)中心,湖南 長(zhǎng)沙 410082;2.湖南大學(xué) 深圳研究院 微納光學(xué)器件先進(jìn)制造實(shí)驗(yàn)室,廣東 深圳 518000;3.湖南大學(xué) 粵港澳大灣區(qū)創(chuàng)新研究院,廣東 廣州 511300)
1 引 言
成像與顯示是將研究對(duì)象的光場(chǎng)信息通過(guò)圖像形式進(jìn)行記錄,再通過(guò)顯示設(shè)備再現(xiàn)圖像信息的過(guò)程。目前,成像與顯示技術(shù)通常只涉及二維光強(qiáng)信息和色彩信息,缺失了場(chǎng)景深度、目標(biāo)幾何形態(tài)和空間遮擋關(guān)系等關(guān)鍵的三維信息,使得人們只能通過(guò)二維窗口去觀察三維世界。隨著人類社會(huì)和信息技術(shù)的發(fā)展,傳統(tǒng)二維成像與顯示技術(shù)已經(jīng)無(wú)法滿足機(jī)器和人眼的需求,對(duì)于機(jī)器而言,獲取更多維度的信息能夠保證信息輸入的完備性,充分發(fā)揮計(jì)算機(jī)的決策能力;對(duì)于人眼而言,人們希望能夠直接觀看到真實(shí)的立體場(chǎng)景,獲得沉浸式觀看體驗(yàn)。近年來(lái),隨著高清晰度高速傳感器的出現(xiàn)以及計(jì)算機(jī)運(yùn)算能力的提升,三維成像與顯示技術(shù)得到了深入的研究,并逐漸應(yīng)用到自動(dòng)駕駛、機(jī)器視覺(jué)、智能制造、人臉識(shí)別與檢測(cè)、增強(qiáng)現(xiàn)實(shí)(Augmented Reality,AR)及虛擬現(xiàn)實(shí)(Virtual Reality,VR)等多個(gè)領(lǐng)域中[1-2]。
三維成像技術(shù)能夠獲取并保存物體的空間三維信息和三維特性,根據(jù)有無(wú)光源可分為主動(dòng)式和被動(dòng)式。主動(dòng)式三維成像通過(guò)主動(dòng)照明獲取空間物體的三維信息,需要光源投射和接收裝置作為輔助,這增加了系統(tǒng)的復(fù)雜度和功耗。目前廣泛應(yīng)用的主動(dòng)式三維成像技術(shù)是點(diǎn)云投射、光束掃描和三維斷層掃描。其中,點(diǎn)云投射[3]適合近距離物體的三維探測(cè),處理的數(shù)據(jù)量小,主要應(yīng)用于手機(jī)等終端設(shè)備的人臉識(shí)別與檢測(cè);光束掃描基于飛行時(shí)間法[4]可以實(shí)現(xiàn)遠(yuǎn)距離三維測(cè)距,主要應(yīng)用于智能駕駛的無(wú)人車;3D斷層掃描[5]檢測(cè)距離較短,但實(shí)時(shí)性強(qiáng),主要應(yīng)用于顯微系統(tǒng)中的動(dòng)態(tài)樣品立體成像或表面輪廓檢測(cè)。被動(dòng)式三維成像技術(shù)通過(guò)透鏡成像獲取包含三維信息編碼的圖像,系統(tǒng)的復(fù)雜度和功耗較低,可以分為透鏡陣列型和單透鏡型。透鏡陣列型三維成像是一種多目視覺(jué)方法[6],其典型代表是光場(chǎng)成像[7],通過(guò)透鏡陣列將光線分散調(diào)制到圖像傳感器的不同位置,然后基于獲取的傳感器數(shù)據(jù)拼接成不同視角的圖像陣列,使用算法可以從這些圖像中估計(jì)出深度信息。傳統(tǒng)光場(chǎng)成像受到微透鏡性能缺陷和本身原理的局限,難以實(shí)現(xiàn)高空間分辨率成像[8-9]。單透鏡型三維成像是一種基于計(jì)算重建深度的單目視覺(jué)方法[10],利用聚焦、離焦或者移動(dòng)視差獲取深度感知[11]。基于標(biāo)準(zhǔn)點(diǎn)擴(kuò)散函數(shù)(Point Spread Function,PSF)的離焦成像法[12],通過(guò)獲取不同離焦程度下的焦深圖像序列,但是不同焦深圖像的PSF類似,導(dǎo)致測(cè)量精度有限。三維點(diǎn)擴(kuò)散函數(shù)(3D-PSF)隨著物體深度的不同而產(chǎn)生相應(yīng)的響應(yīng),因此可建立3D-PSF與物體深度的對(duì)應(yīng)關(guān)系[13]。3D-PSF相比標(biāo)準(zhǔn)PSF可實(shí)現(xiàn)精度和可靠性更高的離焦深度成像,但是基于傳統(tǒng)衍射元件的3D-PSF目前存在效率低、體積龐大且難以集成的缺陷。
三維顯示技術(shù)能呈現(xiàn)出立體逼真的畫面,圖像不再局限于平面,讓觀眾有身臨其境的感觀。根據(jù)是否需要佩戴輔助設(shè)備,三維顯示技術(shù)可分為裸 眼三維顯示[14]和助視式 三 維顯示[15-16]兩 大類。全息三維顯示[17-18]和光場(chǎng)三維顯示[19]歸類于裸眼三維顯示,無(wú)需佩戴設(shè)備即可觀看到具有深度信息的三維影像,極大提升了觀看的自由度和舒適度。全息三維顯示是未來(lái)深度沉浸式裸眼三維顯示的理想方法[20]。它包括記錄和再現(xiàn)兩個(gè)過(guò)程,記錄過(guò)程指用光的干涉原理將物光波的振幅和相位信息以干涉條紋的形式記錄在感光介質(zhì)上;再現(xiàn)過(guò)程指利用光的衍射原理將特定光線照射在記錄介質(zhì)上,重建出物光波的振幅和相位信息實(shí)現(xiàn)逼真的三維顯示。光場(chǎng)顯示作為光場(chǎng)成像的逆過(guò)程,使用微透鏡陣列或柱透鏡陣列等光場(chǎng)調(diào)制器件將編碼的光場(chǎng)信息投射到空間中的不同方向,形成由非相干光產(chǎn)生的具有連續(xù)視差的真實(shí)光場(chǎng)三維場(chǎng)景。光場(chǎng)顯示相比于全息三維顯示所需數(shù)據(jù)量較小,被認(rèn)為是目前最具前景的裸眼三維顯示技術(shù)之一。AR和VR是學(xué)術(shù)界和工業(yè)界的新興領(lǐng)域。虛擬圖像以沉浸式和交互方式呈現(xiàn),從而為各種應(yīng)用程序提供新的用戶體驗(yàn)。AR和VR領(lǐng)域的主要平臺(tái)設(shè)備是近眼顯示器[15-16],作為下一代交互式顯示器,呈現(xiàn)充滿用戶整個(gè)視野的虛擬數(shù)字圖像(VR),或者與真實(shí)場(chǎng)景的透視圖相結(jié)合(AR),能夠提供生動(dòng)的三維視覺(jué)體驗(yàn)。
三維成像與顯示設(shè)備關(guān)注多方面的性能要求,包括寬視場(chǎng)、大數(shù)值孔徑、高分辨率、連續(xù)視差和小型化等方面,然而現(xiàn)有的三維成像與顯示設(shè)備受到傳統(tǒng)光學(xué)元件性能缺陷的限制,難以同時(shí)滿足這些需求。例如,傳統(tǒng)折射光學(xué)元件通過(guò)累計(jì)的厚度量來(lái)改變單一光學(xué)參量,造成功能單一、體積龐大和難集成的缺陷。隨著光電子科學(xué)技術(shù)以及光子集成器件的飛速發(fā)展,發(fā)展高效率、集成化和緊湊型三維成像與顯示系統(tǒng)成為研究的熱點(diǎn)[21]。近年來(lái),一種由亞波長(zhǎng)尺度的單元結(jié)構(gòu)排布組成的超構(gòu)表面[22-25]為開(kāi)發(fā)輕薄光學(xué)多功能器件提供了變革性的解決方案。超構(gòu)表面利用亞波長(zhǎng)尺度下光與物質(zhì)的相互作用,通過(guò)合理排布并調(diào)整納米單元的形狀、大小、位置和取向,對(duì)局部電磁場(chǎng)的偏振[26-27]、振幅[28-29]、相位[30-31]和頻率[32]等傳播特性進(jìn)行任意操縱,為人工調(diào)控電磁波提供了豐富的自由度。研究者開(kāi)發(fā)出了各種功能新穎的超構(gòu)表面,并成功應(yīng)用于全息顯示[33-35]、超構(gòu)透鏡[36-39]、光束整形[40-44]以及非線性光學(xué)[45-47]等領(lǐng)域。超構(gòu)表面具有多功能、輕薄化、平面化和易集成等優(yōu)勢(shì),有望突破傳統(tǒng)三維成像與顯示設(shè)備的瓶頸,為新型緊湊型三維成像與顯示設(shè)備提供新方案,因此具有廣闊的應(yīng)用前景。
本文主要綜述了超構(gòu)表面在三維成像與顯示技術(shù)中的應(yīng)用進(jìn)展,對(duì)主動(dòng)式和被動(dòng)式三維成像進(jìn)行討論,其中主動(dòng)式成像包括點(diǎn)云投射、光束掃描和3D斷層掃描,被動(dòng)式三維成像包括透鏡陣列型和單透鏡型。然后,介紹了全息顯示、光場(chǎng)顯示和近眼顯示3種三維顯示技術(shù)。最后,對(duì)超構(gòu)表面在三維成像與顯示技術(shù)中面臨的挑戰(zhàn)和未來(lái)發(fā)展方向進(jìn)行了展望。
2 超構(gòu)表面在三維成像領(lǐng)域的應(yīng)用
傳統(tǒng)的三維成像設(shè)備由于光源輔助和透鏡級(jí)聯(lián)等問(wèn)題,需要較大體積的設(shè)備作為支撐,因此研究體積小、輕量化和易集成的緊湊型三維成像設(shè)備成為目前學(xué)術(shù)界和工業(yè)界的研究熱點(diǎn)。超構(gòu)表面具有對(duì)光束的靈活調(diào)控能力以及超輕超薄易集成的特性,能為實(shí)現(xiàn)新型三維成像設(shè)備提供一條新的途徑。本文回顧了超構(gòu)表面在主動(dòng)式和被動(dòng)式三維成像領(lǐng)域中的應(yīng)用進(jìn)展。
2.1 主動(dòng)式三維成像
主動(dòng)式三維成像需要配備光源,通過(guò)對(duì)光源進(jìn)行發(fā)射和調(diào)制來(lái)獲取空間物體的三維信息,該系統(tǒng)較為復(fù)雜,包括激光器、投射器和接收器等設(shè)備。根據(jù)成像原理和對(duì)光源調(diào)制方式的不同,主動(dòng)式三維成像技術(shù)可以分為點(diǎn)云投射、光束掃描和3D斷層掃描。
2.1.1 點(diǎn)云投射
點(diǎn)云投射是結(jié)構(gòu)光照明[3]中的關(guān)鍵技術(shù),使用投射器將準(zhǔn)直激光束按照一定的規(guī)則和模式進(jìn)行編碼重新分配后發(fā)射到物體空間中,產(chǎn)生具有均勻強(qiáng)度的點(diǎn)云陣列,然后采集反射回來(lái)的隨著物體距離和表面三維形貌的不同而發(fā)生形變的圖案,再計(jì)算圖案中每個(gè)像素的形變量,獲得物體的深度信息實(shí)現(xiàn)三維成像。點(diǎn)云投射的性能指標(biāo)主要包括視場(chǎng)、衍射效率和光斑均勻性。傳統(tǒng)點(diǎn)云投射使用衍射光學(xué)元件(Diffractive Optical Elements,DOEs)[48]來(lái)實(shí)現(xiàn),通過(guò)不同高度的臺(tái)階實(shí)現(xiàn)0~π的相位調(diào)制,在加工時(shí)使用復(fù)雜的套刻工藝,對(duì)加工提出了較大挑戰(zhàn)。傳統(tǒng)DOEs的大光柵周期使得在大視場(chǎng)角時(shí)受到非期望衍射階次雜散光的影響,光束衍射效率下降和強(qiáng)度均勻性差,因此DOEs的視場(chǎng)范圍有限。超構(gòu)表面通過(guò)亞波長(zhǎng)結(jié)構(gòu)單元陣列的諧振或波導(dǎo)響應(yīng)實(shí)現(xiàn)0~2π相位的任意調(diào)控,具有更大的設(shè)計(jì)自由度、亞波長(zhǎng)空間分辨率和多參量調(diào)控的優(yōu)勢(shì),可以實(shí)現(xiàn)大視角、高衍射效率、強(qiáng)度均勻以及選擇性衍射等點(diǎn)云投射功能。超構(gòu)表面采用標(biāo)準(zhǔn)半導(dǎo)體制備工藝,只需一次刻蝕即可完成加工,具有超輕薄和易集成的優(yōu)勢(shì),能與激光器等其他光學(xué)元件集成,促進(jìn)了微型輕薄化三維成像技術(shù)的發(fā)展。
針對(duì)傳統(tǒng)DOEs用于大視場(chǎng)點(diǎn)云投射時(shí)存在衍射效率低和光束強(qiáng)度均勻性差的問(wèn)題,Ni等[49]開(kāi)發(fā)了一種偏振無(wú)關(guān)的硅基超構(gòu)表面衍射光學(xué)元件,實(shí)現(xiàn)了具有120°×120°視場(chǎng)角,強(qiáng)度均勻且高效率的2D結(jié)構(gòu)光點(diǎn)云陣列投射,如圖1(a)所示。作者使用矢量電磁仿真對(duì)超構(gòu)表面的結(jié)構(gòu)參數(shù)進(jìn)行優(yōu)化,納米單元采用4倍旋轉(zhuǎn)對(duì)稱性的超晶胞設(shè)計(jì)消除了偏振依賴性,可在1 550 nm的電信波長(zhǎng)下工作,衍射效率高達(dá)81%。為解決傳統(tǒng)DOEs只能實(shí)現(xiàn)2π半空間點(diǎn)云投射的限制,Li等[50]提出了一種基于非晶硅的Hermitian共軛加擾超構(gòu)表面,在不考慮入射光偏振狀態(tài)的情況下同時(shí)實(shí)現(xiàn)透射和反射模式,生成了具有壓縮信息密度的4π全空間隨機(jī)點(diǎn)云,如圖1(b)所示。由加擾超構(gòu)表面生成的單個(gè)衍射光束衍射角度接近90°,視場(chǎng)角(Field of View,F(xiàn)OV)接近180°,因此可以在透射和反射下實(shí)現(xiàn)4-全空間的隨機(jī)點(diǎn)云生成,并且具有高信息容量(4 404個(gè)隨機(jī)點(diǎn)云),能夠輔助結(jié)構(gòu)光3D成像。在生成制備加擾超構(gòu)表面時(shí)使用非晶硅材料和光刻等成熟的半導(dǎo)體制造工藝,有利于商用大批量生產(chǎn)。超構(gòu)表面也可將光分裂和衍射成具有所需輪廓的多個(gè)光束,實(shí)現(xiàn)點(diǎn)云的選擇性投射。Song等[51]利用基于幾何相位的介質(zhì)超構(gòu)表面對(duì)入射圓偏振光的復(fù)振幅進(jìn)行調(diào)制,實(shí)現(xiàn)了光束衍射級(jí)次選擇性出射。該超構(gòu)表面展示了選定的衍射級(jí)出射形成帶有單詞“META”的圖案,而其他衍射級(jí)則被抑制,如圖1(c)所示。實(shí)驗(yàn)表征了其衍射級(jí)的分布均勻性和角度,具有極高的傳輸效率,并且易于集成到復(fù)雜系統(tǒng),可以用于各種光學(xué)檢測(cè)中。在點(diǎn)云投射中,對(duì)光束進(jìn)行大面積像素化控制能良好地輔助三維成像,但是在制造上存在挑戰(zhàn)和困難。隨著光刻技術(shù)的發(fā)展,超構(gòu)表面大面積圖案化成為可能。Li等[52]運(yùn)用浸沒(méi)式光刻技術(shù)在12英寸玻璃晶圓上制備了尺寸為2 500μm×2 500μm的大面積像素化超構(gòu)表面光束偏轉(zhuǎn)器。如圖1(d)所示,21×21的光束偏轉(zhuǎn)器陣列可同時(shí)生成441個(gè)隨機(jī)點(diǎn),或者通過(guò)切換光束偏轉(zhuǎn)器的像素點(diǎn)來(lái)進(jìn)行逐像素光束轉(zhuǎn)向,即每個(gè)像素設(shè)計(jì)特定的彎曲角和定向角,以控制傳輸光束的傳播方向。
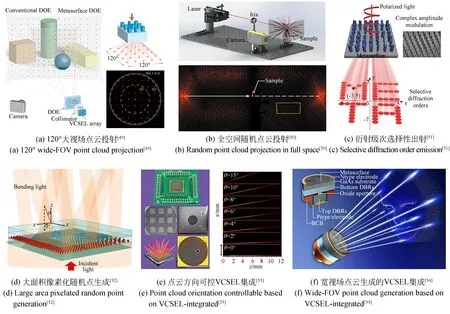
圖1 超構(gòu)表面實(shí)現(xiàn)點(diǎn)云投射Fig.1 Point cloud projection by metasurfaces
超構(gòu)表面與光源進(jìn)行片上集成是使主動(dòng)式三維成像設(shè)備進(jìn)一步輕量化和小型化的有力解決方案。比較常見(jiàn)的激光器是垂直腔面發(fā)射激光 器(Vertical Cavity Surface-Emitting Laser,VCSEL),其結(jié)構(gòu)由布拉格反射層和多量子阱增益介質(zhì)組成,它發(fā)射垂直于晶圓表面的相干激光束。相比發(fā)光二極管(LED)和邊發(fā)射激光器(EEL)等其他激光器,VCSEL具有閾值電流小、低功耗、晶圓級(jí)測(cè)試、圓形輸出光束輪廓、發(fā)射角小、調(diào)制速度快,以及能夠進(jìn)行大規(guī)模2D陣列制造的優(yōu)勢(shì),因此成為集成光子應(yīng)用的首選。VCSEL可以發(fā)射更高光束質(zhì)量的激光束,有利于實(shí)現(xiàn)高衍射效率的大視場(chǎng)點(diǎn)云投射。單模VCSEL發(fā)射的散度通常超過(guò)10°,需要額外的光學(xué)元件進(jìn)行光束整形。大多數(shù)用于結(jié)構(gòu)光點(diǎn)云投射的超構(gòu)表面都只是充當(dāng)光路系統(tǒng)中一個(gè)光束整形的器件,仍然存在小型化的空間。因此,將光源和光束整形器件集成到單一的復(fù)合系統(tǒng)中,能夠顯著減小三維成像設(shè)備的體積,實(shí)現(xiàn)芯片級(jí)三維成像設(shè)備。Xie等[53]提出了一種VCSEL集成超構(gòu)表面(MS-VCSEL)陣列,能實(shí)現(xiàn)可編程的激光發(fā)射和完全任意的光束輪廓控制,如圖1(e)所示。他們將VCSEL光源與滿足準(zhǔn)直相位輪廓的光輸出耦合介質(zhì)超構(gòu)表面進(jìn)行集成,在發(fā)射表面對(duì)VCSEL激光束進(jìn)行整形,不用改變激光腔,散度降低到0.83°,解決了激光系統(tǒng)的衍射問(wèn)題。因?yàn)槌瑯?gòu)表面結(jié)構(gòu)是整體集成在VCSEL上,所以互連光損失最小,傳輸效率高達(dá)80%。對(duì)MSVCSEL陣列中每個(gè)像素的特定電極偏置進(jìn)行編程,該片上設(shè)備可以將光線發(fā)射到所需的方向,且不影響整體激光的特性,但點(diǎn)云投射的視場(chǎng)有限。Wang等[54]實(shí)現(xiàn)了更大視場(chǎng)范圍結(jié)構(gòu)光點(diǎn)云投射的超構(gòu)表面片上VCSEL集成設(shè)備,該設(shè)備具有多通道光束陣列生成、高達(dá)60°的片上大角度光束轉(zhuǎn)向以及寬視場(chǎng)(約124°)的晶圓級(jí)全息光束整形,如圖1(f)所示。
2.1.2 光束掃描
在光檢測(cè)和激光測(cè)距(Light Detection and Ranging,LIDAR)[55]三維成像技術(shù)中,為了保證較長(zhǎng)的探測(cè)距離和較高的精度,需要使用額外的器件進(jìn)行光束掃描。傳統(tǒng)LIDAR掃描方式使用可移動(dòng)的反射鏡通過(guò)掃描方位角和俯仰角來(lái)覆蓋整個(gè)空間,需要使用機(jī)械轉(zhuǎn)動(dòng)裝置,難以實(shí)現(xiàn)小型化,且容易受到外部沖擊和振動(dòng)的影響。光學(xué)相控陣(Optical Phase Array,OPA)掃描方式存在激光功率插入損耗,對(duì)光學(xué)系統(tǒng)的功耗要求較高,需要解決系統(tǒng)熱管理的關(guān)鍵問(wèn)題。超構(gòu)表面具有強(qiáng)大的光場(chǎng)調(diào)控能力,因此人們將超構(gòu)表面應(yīng)用于光束掃描中。超構(gòu)表面光束掃描方案主要是基于可調(diào)諧有源超構(gòu)表面,將超構(gòu)表面與透明導(dǎo)電氧化物(TCO)材料、多量子阱(MQW)、微機(jī)電系統(tǒng)(MEMS)、液晶和相變材料等活性介質(zhì)結(jié)合,可對(duì)超構(gòu)表面的相位進(jìn)行動(dòng)態(tài)調(diào)控,實(shí)現(xiàn)光束的動(dòng)態(tài)掃描。可調(diào)諧超構(gòu)表面有望替代激光雷達(dá)的點(diǎn)掃描或線掃描光學(xué)元件,解決現(xiàn)有光束掃描元件的瓶頸問(wèn)題。
2.1.2.1 TCO材料超構(gòu)表面
TCO材料通過(guò)控制電壓來(lái)調(diào)節(jié)有源層中的電荷濃度,進(jìn)而改變有效折射率,實(shí)現(xiàn)對(duì)光束的動(dòng)態(tài)導(dǎo)向能力,具有高速調(diào)制和低電壓偏置的優(yōu)點(diǎn)。銦錫氧化物(ITO)是最常用的TCO材料之一,它在近零區(qū)域(ENZ)時(shí)的介電常數(shù)εITO在-1~1之間,使得在近紅外波長(zhǎng)時(shí)電磁積聚層附近的電場(chǎng)限制增大,具有良好的電可調(diào)性能。Huang等[56]提出并驗(yàn)證了一種柵極可調(diào)的超構(gòu)表面,可以對(duì)超構(gòu)表面反射的平面波的相位和幅度進(jìn)行動(dòng)態(tài)電氣控制。如圖2(a)所示,該動(dòng)態(tài)可調(diào)超構(gòu)表面由Au天線、Al2O3間隔層和ITO襯底組成,其中Au天線用作柵極,ITO作為場(chǎng)效應(yīng)通道。在天線柵極和底層接地平面之間施加電偏置時(shí),Al2O3/ITO界面上的載流子濃度通過(guò)形成電荷積累層或消耗層而增加或減少,實(shí)現(xiàn)ITO的復(fù)介電常數(shù)的調(diào)制,使得入射光與天線的相互作用發(fā)生變化,進(jìn)而控制反射光的方向。實(shí)驗(yàn)表明,施加2.5 V的柵極偏置電壓,可在10 MHz的調(diào)制速率下產(chǎn)生180°的相移和30%的反射率變化。為了證明±1衍射級(jí)的偏轉(zhuǎn)角度,模擬了在施加3.0 V偏置電壓下不同光柵周期的遠(yuǎn)場(chǎng)強(qiáng)度,通過(guò)選通4,3,2個(gè)天線的子組,實(shí)現(xiàn)了-40°~40°的大范圍掃描,視場(chǎng)達(dá)到80°,如圖2(a)所示。采用結(jié)構(gòu)參數(shù)優(yōu)化的不同天線材料或采用雙門控方法,可進(jìn)一步增大相位調(diào)諧范圍。Shimanesh等[57]提出了雙門控場(chǎng)效應(yīng)可調(diào)諧超構(gòu)表面天線陣列。如圖2(b)所示,該雙門控超構(gòu)表面結(jié)構(gòu)由鋁背反射器、柵極電介質(zhì)/ITO/柵極電介質(zhì)異質(zhì)結(jié)構(gòu)和具有“魚骨”圖案的周期性鋁納米天線陣列組成。在每個(gè)有源超構(gòu)表面天線的電介質(zhì)間隔內(nèi)具有兩個(gè)電荷積累/耗盡層,它們提供了雙門控:一個(gè)位于頂部天線與ITO層之間,另一個(gè)位于背板反射器與ITO之間,因此每個(gè)超構(gòu)表面元件允許施加兩個(gè)串聯(lián)的獨(dú)立電壓控制MOS場(chǎng)效應(yīng)通道。頂部和底部的ITO/柵極-電介質(zhì)界面在施加的外部偏置電壓下表現(xiàn)出電荷積累或耗盡,這種載流子密度的調(diào)制促使ITO層的復(fù)折射率大范圍地變化,從而實(shí)現(xiàn)更廣泛的相位可調(diào)性。在1 550 nm波長(zhǎng)下,施加6.5 V偏置電壓,實(shí)現(xiàn)了0~303°的連續(xù)相移和89%的相對(duì)反射率調(diào)制,具有良好的光束控制能力。
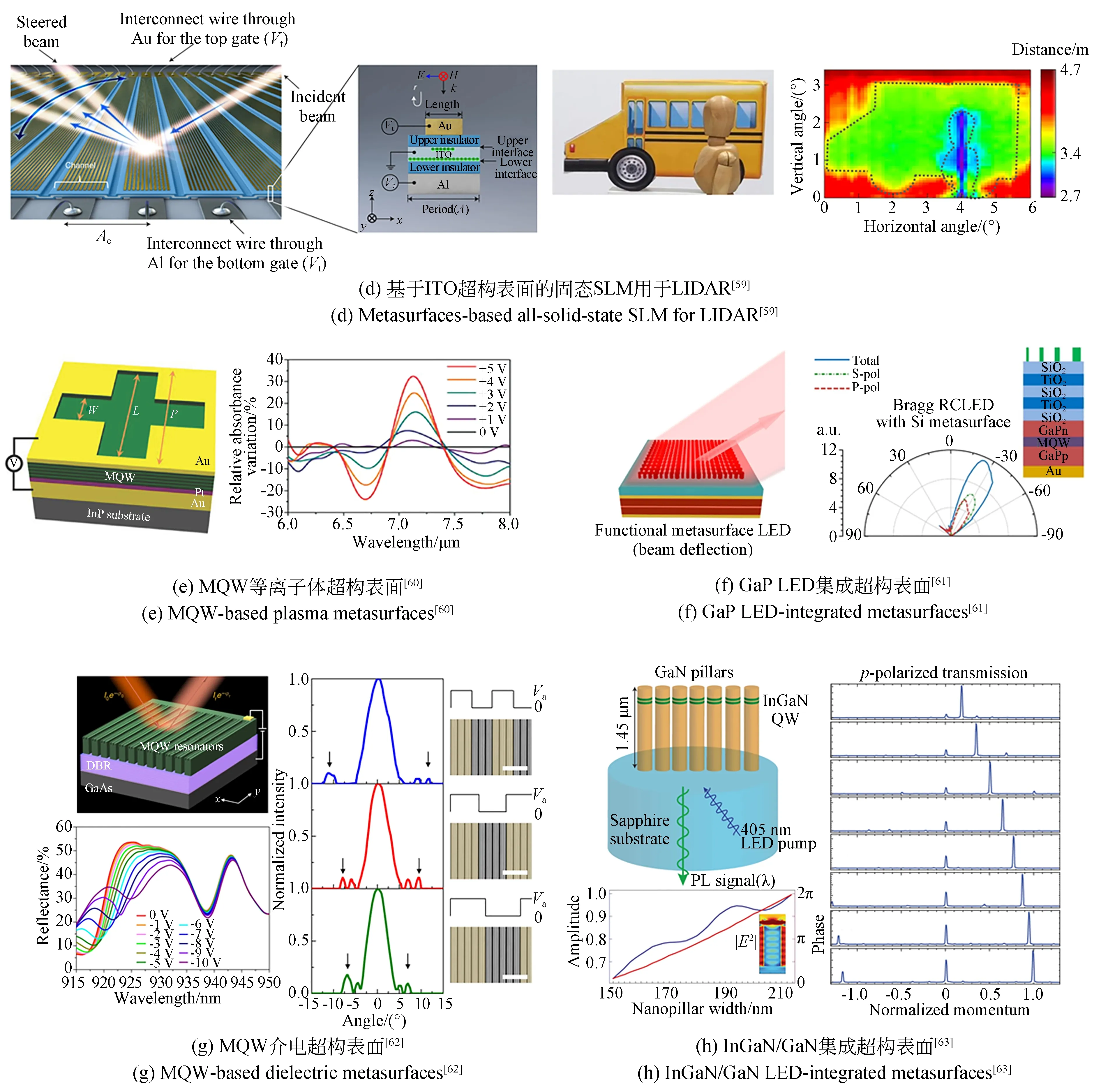
圖2 基于TCO材料或MQW架構(gòu)的超構(gòu)表面實(shí)現(xiàn)光束掃描Fig.2 Metasurfaces based on TCO materials or MQW architecture for beam scanning
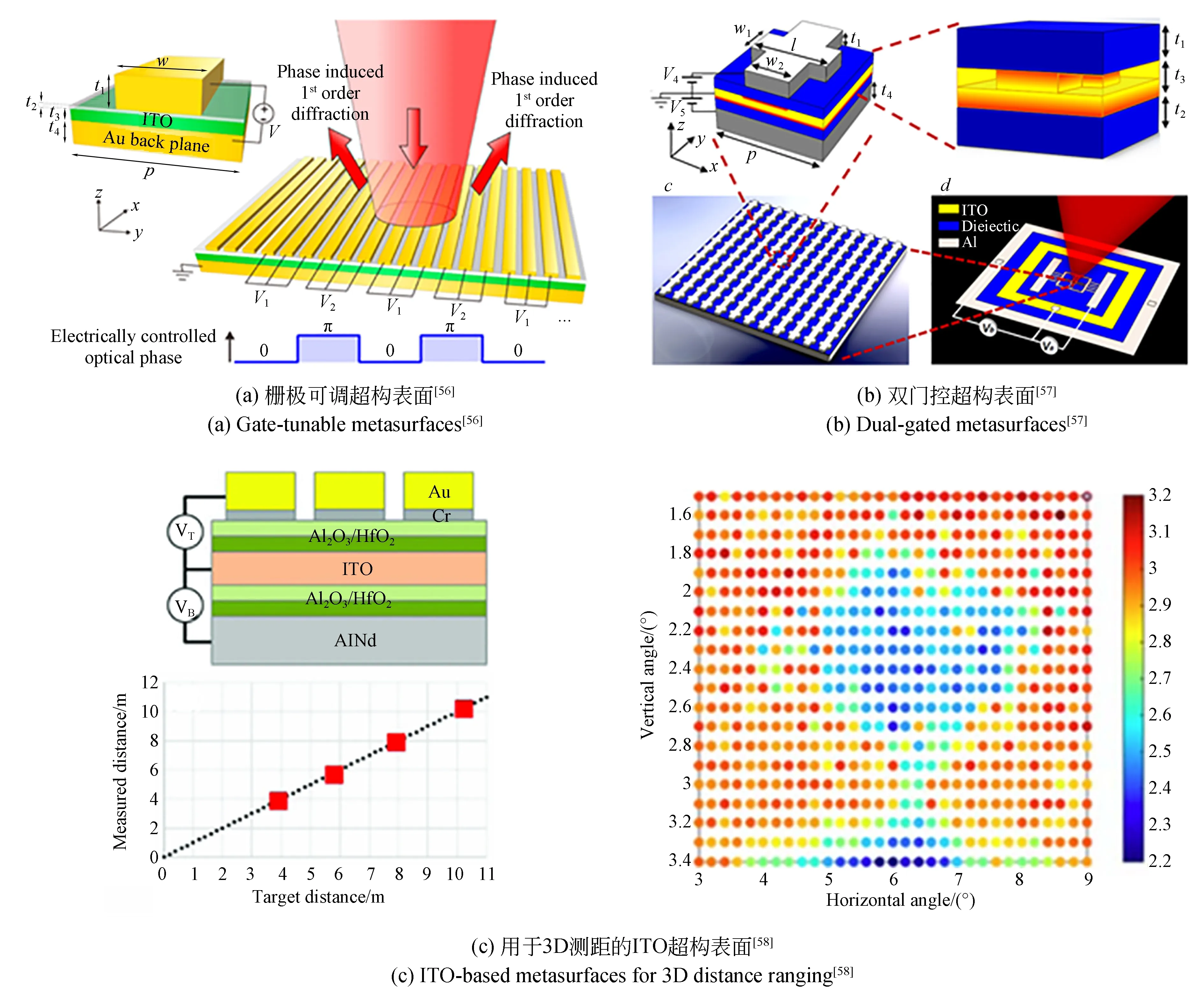
Sun等[58]首次成功使用基于TCO的電可調(diào)有源超構(gòu)表面進(jìn)行了3D深度掃描。如圖2(c)所示,該超構(gòu)表面由有源氧化銦錫(ITO)層的等離子體諧振器陣列組成,使用兩個(gè)單獨(dú)的偏置控制0~360°的幅度和相位調(diào)制,通過(guò)適當(dāng)?shù)钠媒M合可在恒定反射率下實(shí)現(xiàn)0~360°的相位調(diào)制或者在恒定相位下實(shí)現(xiàn)16%的反射率變化。實(shí)驗(yàn)中,使用四級(jí)鋸齒相位光柵進(jìn)行動(dòng)態(tài)光束控制,在允許范圍內(nèi)以任意角度控制光束,邊模抑制比達(dá)到2.7 d B。如圖2(c)所示,結(jié)合飛行時(shí)間原理,成功演示了3D距離測(cè)距,能夠以<4 cm的精度測(cè)量長(zhǎng)達(dá)10 m的距離,掃描角度、角度步長(zhǎng)和分辨率分別為6°×4°,0.2°×0.2°和31×21=651。如圖2(c)所示,3D測(cè)距中測(cè)量與實(shí)際距離之間的誤差低于0.3 m,并且由于超構(gòu)表面陣列的高分辨率,圖像邊緣可以很好被檢測(cè)出來(lái)。2021年,三星在該文章的基礎(chǔ)上開(kāi)發(fā)了一款全固態(tài)掃描儀[59],使用相同結(jié)構(gòu)配置的電可調(diào)等離子體超構(gòu)表面陣列組成的空間光調(diào)制器(Spatial Light Modulator,SLM)實(shí)現(xiàn)光束掃描功能,如圖2(d)所示。在頂層和底層施加兩種不同的電壓偏置,可以獨(dú)立調(diào)整反射系數(shù)的實(shí)部和虛部,實(shí)現(xiàn)360°的幅度和相位控制,提供完整的波前調(diào)制。雖然該器件的掃描角度僅為8°,衍射效率僅為1%,但是具有5.4 MHz的切換速度和283 fJ/μm-2的能耗。圖2(d)為1.56μm工作波長(zhǎng)下激光雷達(dá)系統(tǒng)3D深度探測(cè)的效果,模擬街景由模型車和人組成,人物、模型車和屏幕的距離分別為2.4,3.4和4.7 m,獲得了掃描區(qū)域深度圖,所有目標(biāo)的測(cè)量值和實(shí)際距離相一致,通過(guò)提高設(shè)備效率和邊模抑制比以及優(yōu)化發(fā)射器和接收器的光學(xué)配置,可以進(jìn)一步提高檢測(cè)范圍和精度。
2.1.2.2 MQW半導(dǎo)體超構(gòu)表面
量子阱(Quantum Well,MQW)是一種產(chǎn)生量子尺寸效應(yīng)的異質(zhì)結(jié)半導(dǎo)體激光器架構(gòu)。MQW體系結(jié)構(gòu)可在可見(jiàn)光和近紅外波段依靠電光調(diào)制實(shí)現(xiàn)快速光折射率調(diào)制,能實(shí)現(xiàn)高達(dá)k MHz的調(diào)制速度,廣泛應(yīng)用于高端光電子器件中。隨著超構(gòu)表面的發(fā)展,基于MQW半導(dǎo)體架構(gòu)的超構(gòu)表面被提出。早在2014年Lee等[60]將MQW架構(gòu)與等離子體超構(gòu)表面結(jié)合,實(shí)現(xiàn)了具有納秒級(jí)響應(yīng)時(shí)間和中紅外寬調(diào)諧范圍的電可調(diào)器件。如圖2(e)所示,220 nm厚的MQW半導(dǎo)體層夾在接地平面和等離子體納米諧振器圖案化的金屬層之間,在672 nm和712 nm波長(zhǎng)附近實(shí)現(xiàn)了強(qiáng)表面吸收(或反射率)的調(diào)制,將偏置電壓從0 V更改為+5 V,在712 nm波長(zhǎng)處出現(xiàn)超過(guò)30%的吸光度變化,因此可用于光束控制。Wu等[61]開(kāi)發(fā)了一種在可見(jiàn)光或近紅外波段工作的基于電光可調(diào)諧III-V多量子阱的全電介質(zhì)有源超構(gòu)表面平臺(tái)。如圖2(g)所示,超構(gòu)表面的外延III-V異質(zhì)結(jié)構(gòu)由GaAs襯底、分布式布拉格反射器(DBR)和1.23μm的未摻雜MQW層組成,簡(jiǎn)稱MQW/DBR/GaAs。MQW可在915~920 nm波長(zhǎng)的近帶隙區(qū)域中調(diào)制0.01~0.05的折射率實(shí)部,并且通過(guò)將超構(gòu)表面與Mie共振和導(dǎo)模共振的混合,部分蝕刻的雙縫MQW光柵結(jié)構(gòu)使得在916 nm和963 nm附近的反射率下降。在7 V偏置電壓下增強(qiáng)了917 nm波長(zhǎng)附近的電光調(diào)制,從而產(chǎn)生約270%的反射率變化和70°的相移。MQW折射率實(shí)部的電光調(diào)制會(huì)引起反射光的紅移,通過(guò)實(shí)驗(yàn)驗(yàn)證了動(dòng)態(tài)光束轉(zhuǎn)向的功能,施加3 V的偏置可以產(chǎn)生大約10°的掃描角(20°FOV),并且可對(duì)MQW超構(gòu)表面陣列上的每個(gè)單元元件進(jìn)行單獨(dú)電控。
MQW半導(dǎo)體超構(gòu)表面架構(gòu)最顯著的優(yōu)點(diǎn)是可以直接在III-V組晶圓上單片生長(zhǎng),并與LED、邊緣發(fā)射器和VCSEL等光源同時(shí)集成,使設(shè)備整體更加小型化。比較典型的激光光源是LED,它發(fā)出非相干的朗伯形狀光,具有低成本、低功耗和長(zhǎng)壽命等優(yōu)點(diǎn),但是需要額外的光學(xué)系統(tǒng)來(lái)精確控制發(fā)射光的波前。大多數(shù)超構(gòu)表面只能在大空間相干性的激光照射下才能正常工作,而LED的大角度朗伯散射模式和空間低相干性,使得超構(gòu)表面器件難以在LED上集成。Khaidarov等[62]通過(guò)將GaP LED架構(gòu)與超構(gòu)表面集成來(lái)控制發(fā)射光柵的特性,GaP LED結(jié)構(gòu)由多個(gè)量子阱(MQW)組成,發(fā)射波長(zhǎng)約為620 nm,如圖2(f)所示。這種設(shè)計(jì)極大地減少了LED發(fā)射角度,可根據(jù)超構(gòu)表面的相位分布來(lái)引導(dǎo)和塑造發(fā)射光束。如圖2(f)所示,該集成超構(gòu)表面可以實(shí)現(xiàn)約30°的光束偏轉(zhuǎn),但從發(fā)射效率和泵涌功率之比可得效率較低(3%)。針對(duì)LED光發(fā)射效率低的問(wèn)題,Iyer[63]等提出了InGaN/GaN量子阱結(jié)構(gòu)的超構(gòu)表面,可在任意角度產(chǎn)生窄的單向傳輸和發(fā)射波瓣。如圖2(h)所示,所制備的超構(gòu)表面由嵌入在襯底上的GaN柱和100 nm GaN覆蓋層的InGaN/GaN MQW發(fā)光相柱組成。該量子阱通過(guò)405 nm的LED光泵浦激發(fā),當(dāng)發(fā)射光通過(guò)GaN柱向基板時(shí)產(chǎn)生相位延遲。氮化鎵柱被設(shè)計(jì)成具有平面內(nèi)的相位梯度,從而誘導(dǎo)動(dòng)量改變了某些通道中遠(yuǎn)場(chǎng)輻射光的局部密度。這種對(duì)耦合通道的選擇性修改會(huì)導(dǎo)致非對(duì)稱和單向發(fā)射,并增強(qiáng)光致發(fā)光對(duì)所選通道的影響。通過(guò)實(shí)驗(yàn)測(cè)量,總量子效率和空氣耦合外部量子效率分別提高了7倍和100倍。
2.1.2.3 MEMS集成的超構(gòu)表面
超構(gòu)表面與MEMS集成實(shí)現(xiàn)光束掃描與傳統(tǒng)激光雷達(dá)的掃描方法類似,超構(gòu)表面作為反射調(diào)制器件,通過(guò)MEMS驅(qū)動(dòng)超構(gòu)表面的基板移動(dòng)或者M(jìn)EMS驅(qū)動(dòng)超構(gòu)表面產(chǎn)生形變來(lái)實(shí)現(xiàn)光束掃描功能。基于第一種機(jī)制,Arbabi等[64]提出了一種MEMS集成的可調(diào)諧超構(gòu)透鏡,通過(guò)驅(qū)動(dòng)超構(gòu)表面基板進(jìn)行小移動(dòng),來(lái)實(shí)現(xiàn)光焦度的大范圍調(diào)諧,即焦距的調(diào)節(jié),如圖3(a)所示。實(shí)驗(yàn)表明,915 nm聚焦二極管激光器的焦點(diǎn)位置可以偏移約60μm,調(diào)制速度為2~4 kHz。該設(shè)備的陣列可以在同一芯片上制造,實(shí)現(xiàn)多個(gè)不同焦距的鏡頭掃描不同深度。但是,這種方法需要較高的偏置電壓(高達(dá)80 V),僅能實(shí)現(xiàn)μm級(jí)別的移動(dòng)。基于第二種機(jī)制,即通過(guò)驅(qū)動(dòng)超構(gòu)表面形變實(shí)現(xiàn)光束掃描,Holsteen等[65]設(shè)計(jì)了一種懸浮硅(Si)超構(gòu)表面,通過(guò)添加一個(gè)電壓控制的驅(qū)動(dòng)元件,實(shí)現(xiàn)了時(shí)間顏色控制、動(dòng)態(tài)光束控制和可見(jiàn)光范圍的光聚焦等多項(xiàng)功能,調(diào)制速度為1 MHz,偏置電壓為2~3 V。該超構(gòu)表面器件使用高指數(shù)Si納米結(jié)構(gòu),具有強(qiáng)大的Mie光學(xué)共振,可提供對(duì)光散射的有效局部控制。使用絕緣體上硅(SOI)技術(shù)將不同的基于Mie諧振器的超構(gòu)表面懸浮在硅襯底上方,對(duì)各種光學(xué)功能進(jìn)行機(jī)械調(diào)諧。Mie共振可以通過(guò)MEMS控制,調(diào)制發(fā)生在襯底和Si超構(gòu)表面之間的法布里-珀羅共振模式,進(jìn)而改變超構(gòu)表面陣列尺寸來(lái)實(shí)現(xiàn)光束控制。如圖3(b)所示,懸浮Si超構(gòu)表面在600 nm波長(zhǎng)處覆蓋了12°的掃描角度(視場(chǎng)角24°),其偏置電壓為1.2 V。
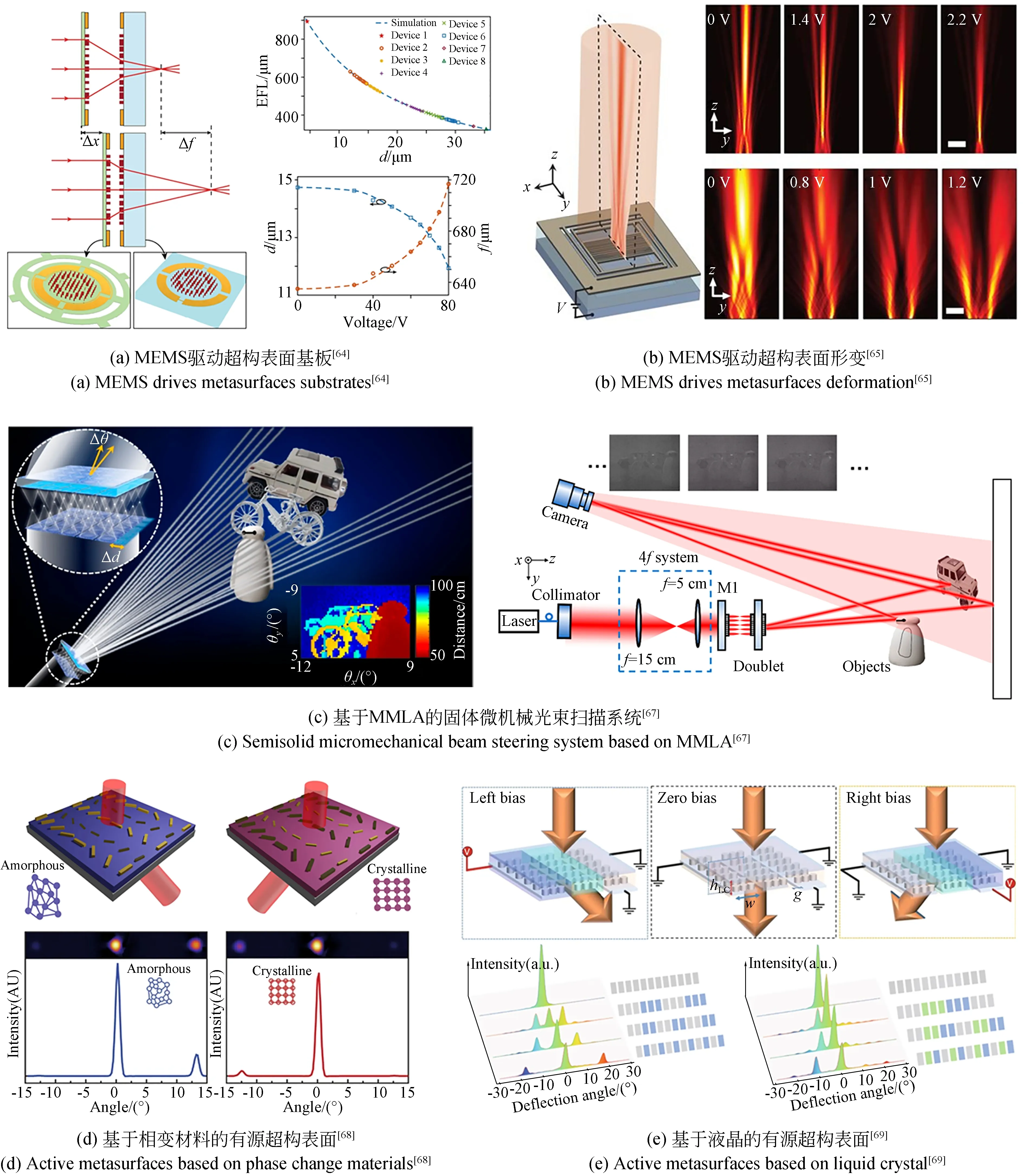
圖3 基于MEMS集成、相變材料或液晶的超構(gòu)表面實(shí)現(xiàn)光束掃描Fig.3 Metasurfaces based on MEMS integration,phase change materials or liquid crystal for beam scanning
研究人員開(kāi)發(fā)了眾多的方案來(lái)實(shí)現(xiàn)特定場(chǎng)景下的光束控制和掃描。偏心微透鏡陣列(DMLA)[66]是一種MEMS光束掃描方案,它作為機(jī)械和全固態(tài)方法的過(guò)渡技術(shù),繼承了固態(tài)方法的緊湊性和快速特性以及笨重的機(jī)械方法的高分辨率和功率容差,但是受限于傳統(tǒng)微透鏡的性能。超構(gòu)表面的亞波長(zhǎng)調(diào)制性能可以高效地實(shí)現(xiàn)極小F數(shù)的透鏡,打破傳統(tǒng)透鏡光學(xué)元件的瓶頸,同時(shí)超構(gòu)表面超輕超薄的特性減小了MEMS驅(qū)動(dòng)所負(fù)載的慣性,將超構(gòu)表面透鏡替代傳統(tǒng)微透鏡作為光束掃描方案中可以實(shí)現(xiàn)高效率、高精度、大視場(chǎng)和高速的光束掃描。最近,Chen等[67]將一組共焦的單層超構(gòu)表面微透鏡陣列和雙層超構(gòu)表面微透鏡陣列組合,開(kāi)發(fā)了基于超構(gòu)表面透鏡陣列的半固體微機(jī)械光束掃描系統(tǒng)(Micromechanical beam steering system based on Micrometa-Lens Arrays,MMLA)。入射光束通過(guò)第一組微透鏡陣列聚焦后由雙層超構(gòu)表面微透鏡陣列準(zhǔn)直出射,通過(guò)控制兩組微透鏡陣列之間的微位移可以實(shí)現(xiàn)出射光束的大角度控制,如圖3(c)所示。MMLA具有極小的F數(shù),在微小位移下對(duì)出射角度具有極大的控制能力,在較大視場(chǎng)下?lián)碛辛己玫南癫钚U芰统龉饪趶奖壤约敖咏苌錁O限的角度分辨能力,有利于遠(yuǎn)距離和深空探測(cè)的應(yīng)用。實(shí)驗(yàn)在70μm的最大離軸位移量下得到30°×30°的視場(chǎng)角和0.14°的角分辨率,器件體積小于0.5 mm3。將MMLA應(yīng)用在激光雷達(dá)中進(jìn)行模擬街景的三維深度掃描,可以清楚地識(shí)別物體的輪廓和結(jié)構(gòu),驗(yàn)證了該系統(tǒng)的3D深度掃描能力。
2.1.2.4 相變材料或液晶超構(gòu)表面
相變材料也是一種制備有源可調(diào)諧超構(gòu)表面的材料,它在外部熱、光和電的刺激下,在非晶態(tài)和晶態(tài)之間快速和重復(fù)切換,具有紅外區(qū)高折射率對(duì)比度和非揮發(fā)性特性。Yin等[68]提出了一種相變材料高度集成的等離子體有源超構(gòu)表面,實(shí)現(xiàn)了不依賴于機(jī)械變形的光束轉(zhuǎn)向和變焦。如圖3(d)所示,該超構(gòu)表面由50 nm厚的相變材料有源層(Ge3Sb2Te6)、15 nm厚的防氧化層(ZnS:SiO2)和40 nm厚的Au天線超構(gòu)表面組成。有源層在沉積時(shí)處于非晶態(tài),在加熱到160°時(shí)切換到結(jié)晶態(tài)。配置兩組不同類型的等離子納米天線A和B,它們具有不同的等離子共振。在非晶態(tài)下,一組在3.1μm處共振,而另一組在2.28μm處共振;在結(jié)晶狀態(tài)下,共振分別移動(dòng)到4.1μm和3.1μm。因此,每個(gè)天線都與非晶態(tài)和晶態(tài)相互作用,從而改變衍射光束的衍射角,實(shí)現(xiàn)了光束掃描功能。
SLM在激光雷達(dá)三維成像中具有廣泛的應(yīng)用,能夠在不改變強(qiáng)度的情況下重新配置每個(gè)像素透射或反射光的相位延遲,一般使用液晶(Liquid Crystal,LC)來(lái)實(shí)現(xiàn)。LC分子在外加電壓下能夠沿給定方向動(dòng)態(tài)控制折射率。基于LC的SLM的大像素尺寸提高了投影圖像的分辨率和FOV。在保持LC層所需厚度的同時(shí)進(jìn)一步縮小像素尺寸存在相互串?dāng)_的問(wèn)題,嚴(yán)重限制了其潛在的應(yīng)用。Li等[69]將TiO2超構(gòu)表面與LC集成,實(shí)現(xiàn)了亞波長(zhǎng)像素尺寸的小型化SLM。通過(guò)修改超構(gòu)表面納米天線周圍的液晶方向來(lái)改變局部共振,以亞波長(zhǎng)像素調(diào)制透射光波前。如圖3(e)所示,在液晶夾層中集成205 nm高度的超構(gòu)表面結(jié)構(gòu),可在660~670 nm波長(zhǎng)內(nèi),根據(jù)液晶分子取向(0°,45°和90°)實(shí)現(xiàn)三級(jí)相位延遲。超構(gòu)表面由3個(gè)納米盤單元排列組成,提高了衍射效率,模擬預(yù)測(cè)在665 nm處的一級(jí)衍射效率為48%。如圖3(e)所示,該三能級(jí)SLM,通過(guò)施加0,3.5和8 V的偏置電壓實(shí)現(xiàn)一階偏轉(zhuǎn),角度約為11°(FOV為22°)。與傳統(tǒng)的SLM相比,該超構(gòu)表面集成的SLM的像素尺寸減小三分之一,液晶厚度減小一半以上。
不同調(diào)控方式實(shí)現(xiàn)的動(dòng)態(tài)可調(diào)諧超構(gòu)表面光束掃描方案,具有不同的優(yōu)勢(shì)和特性。TCO適用于近紅外和中紅外波段,調(diào)制速度可達(dá)幾十MHz,具有高載流子密度,可以在大調(diào)諧范圍顯著地改變折射率。MQW適用于可見(jiàn)光和近紅外光波段,具有更高的調(diào)制速度(kMHz),可直接在晶圓上生長(zhǎng),并與LED、邊緣發(fā)生器和VCSEL等激光光源集成,實(shí)現(xiàn)設(shè)備的小型化。相變材料,例如GST通過(guò)改變溫度可以在非晶相和結(jié)晶相之間快速切換(ns級(jí)),在紅外波段具有高折射率對(duì)比度和非揮發(fā)特性,但是其加工制備難度大。液晶的分子取向受外部電場(chǎng)控制,施加電壓可以在太赫茲到可見(jiàn)光的寬波段內(nèi)工作,但是調(diào)制速度只有kHz,切換時(shí)間為ms級(jí)。MEMS系統(tǒng)通過(guò)形變實(shí)現(xiàn)連續(xù)的光束掃描,信息采集更加完整,但是視場(chǎng)角有限,且其機(jī)械結(jié)構(gòu)存在一定的慣性。因此,要根據(jù)不同的光束掃描場(chǎng)景選擇適用的有源超構(gòu)表面方案,能夠更好地輔助主動(dòng)式三維成像技術(shù)。
2.1.3 3D斷層掃描
3D斷層掃描是一種三維顯微技術(shù),使用掃描儀對(duì)樣本多個(gè)橫截面進(jìn)行拍攝,然后重建出3D圖像。傳統(tǒng)3D斷層掃描需要用到復(fù)雜的機(jī)械轉(zhuǎn)向部件,增加了顯微系統(tǒng)的復(fù)雜度。超構(gòu)表面可以幫助顯微鏡在沒(méi)有復(fù)雜機(jī)械部件的情況下實(shí)現(xiàn)3D斷層掃描解析活細(xì)胞。Li等[70]通過(guò)幾何相位設(shè)計(jì)了大色散的超構(gòu)透鏡來(lái)簡(jiǎn)化斷層掃描技術(shù)。超構(gòu)透鏡由GaN納米柱按同心環(huán)圖案化陣列排布組成,其特性與波長(zhǎng)相關(guān),在可見(jiàn)光下聚焦在目標(biāo)的不同區(qū)域,可實(shí)現(xiàn)非運(yùn)動(dòng)方式的3D斷層掃描,如圖4(a)所示。該高數(shù)值孔徑超構(gòu)透鏡在可見(jiàn)光波段可以獲得高成像分辨率,并且大色散的設(shè)計(jì)使它在一定成像距離時(shí)具有高縱向分辨率,對(duì)一組沿光軸排列的旋轉(zhuǎn)孔玻片進(jìn)行成像,可以在獲得的圖像中區(qū)分不同的旋轉(zhuǎn)孔,驗(yàn)證了斷層掃描的功能。對(duì)青蛙卵細(xì)胞進(jìn)行顯微3D斷層掃描,顯示了散焦-聚焦-散焦過(guò)程的清晰演變和高分辨率,因此可以區(qū)分細(xì)胞膜和細(xì)胞核的深度。
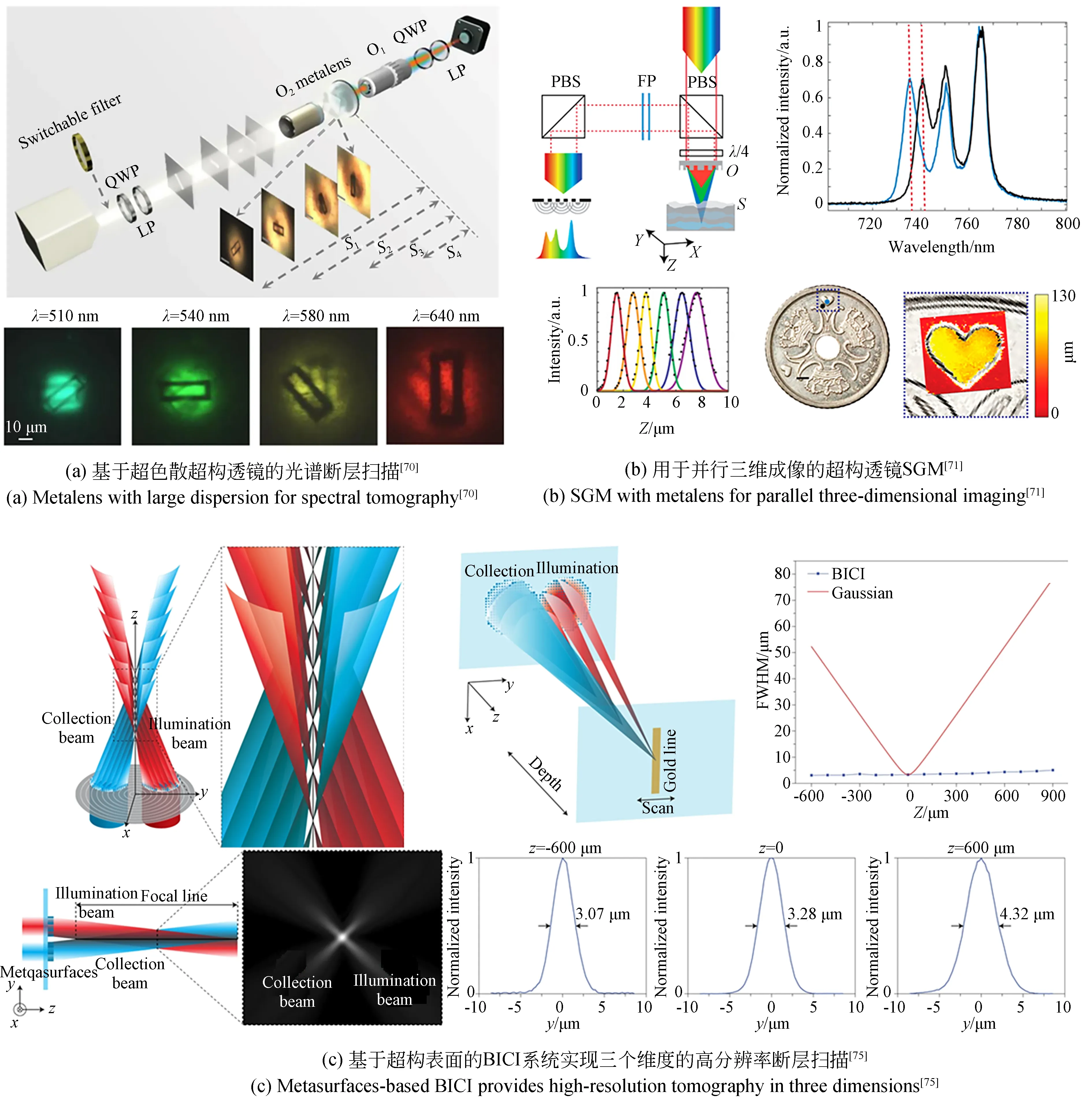
圖4 超構(gòu)表面用于3D斷層掃描Fig.4 Metasurfaces for 3D tomography
傳統(tǒng)的三維生物顯微中,獲取深度信息通常需要在軸向維度上進(jìn)行額外的掃描,犧牲部分的空間分辨率以保證時(shí)間分辨率,因此動(dòng)態(tài)生物的快速高分辨三維成像仍有待完善。Edrei等[71]提出了一種光譜門控顯微鏡(Spetrally Gated Microscopy,SGM)。SGM通過(guò)共振失配來(lái)抑制離焦光,實(shí)現(xiàn)光譜抑制。如圖4(b)所示,SGM利用超構(gòu)透鏡的強(qiáng)色散進(jìn)行波長(zhǎng)多路復(fù)用,可以在單次拍攝下對(duì)不同深度平面同時(shí)進(jìn)行采集,從光譜的變化信息中獲取深度信息。該系統(tǒng)有效利用了光譜域的信息維度,有助于實(shí)現(xiàn)快速高分辨3D成像。實(shí)驗(yàn)對(duì)硬幣進(jìn)行3D成像,選擇硬幣的一部分區(qū)域,記錄該區(qū)域內(nèi)兩個(gè)點(diǎn)的光譜,通過(guò)光譜與深度的轉(zhuǎn)換關(guān)系獲得硬幣的深度信息,但是成像的深度范圍較小,僅為微米級(jí)別。在相對(duì)較大的深度范圍內(nèi)保持高分辨率的光學(xué)成像一直是動(dòng)態(tài)生物顯微成像所追求的目標(biāo)。傳統(tǒng)的共焦[72]和雙光子顯微鏡[73]等顯微成像方式僅能夠?qū)裹c(diǎn)周圍的狹窄區(qū)域?qū)崿F(xiàn)高分辨率成像,且需要額外的掃描部件相對(duì)于目標(biāo)進(jìn)行軸向平移實(shí)現(xiàn)深度分辨成像,成像深度僅為幾百微米。光學(xué)相干層析成像(Optical Coherence Tomography,OCT)[74]利用相干門控的原理捕獲散射組織的實(shí)時(shí)深度分辨圖像,但由于衍射的問(wèn)題只能實(shí)現(xiàn)毫米深度的三維成像,因此橫向分辨率和聚焦深度之間相互制約。最近,Pahlevaninezhad等[75]提出了一種雙射光收集成像(BICI)的概念,能實(shí)現(xiàn)三個(gè)維度的高分辨率斷層掃描。利用超構(gòu)表面的調(diào)制能力,在成像光路中布置了照明和收集兩條路徑,沿焦線定義的照明光和收集光在空間中一一對(duì)應(yīng),如圖4(c)所示。應(yīng)用BICI克服了高分辨率OCT的局限性,在1.25 mm深度范圍內(nèi)具有約3.2μm的橫向分辨率,能夠在大深度范圍內(nèi)實(shí)現(xiàn)高分辨率成像。
2.2 被動(dòng)式三維成像
被動(dòng)式三維成像技術(shù)通過(guò)透鏡會(huì)聚光線到圖像傳感器進(jìn)行成像,再對(duì)圖像傳感器采集到的數(shù)據(jù)進(jìn)行處理獲取三維信息。與主動(dòng)式三維成像技術(shù)相比,被動(dòng)式三維成像不需要復(fù)雜的投射器和接收器等設(shè)備輔助,可以極大地減小系統(tǒng)的復(fù)雜度和功耗。被動(dòng)式三維成像根據(jù)成像時(shí)使用的透鏡數(shù)量和原理可以分為透鏡陣列型和單透鏡型。
2.2.1 透鏡陣列型三維成像
透鏡陣列型三維成像是使用多個(gè)透鏡拍攝具有不同視差信息的多幅圖像,再通過(guò)圖像之間的匹配關(guān)系計(jì)算出場(chǎng)景的深度信息。光場(chǎng)成像是一種典型的透鏡陣列三維成像技術(shù),能同時(shí)捕獲光線的強(qiáng)度和方向信息。傳統(tǒng)的光場(chǎng)成像使用微透鏡陣列作為光調(diào)制器,存在加工困難和固有性能缺陷的問(wèn)題,限制了其應(yīng)用和發(fā)展。超構(gòu)表面可以實(shí)現(xiàn)透鏡會(huì)聚功能,稱為超構(gòu)透鏡。相比傳統(tǒng)微透鏡,超構(gòu)透鏡無(wú)需級(jí)聯(lián)透鏡即可實(shí)現(xiàn)色差校正,使成像設(shè)備進(jìn)一步小型化。目前,可見(jiàn)光波段的寬帶消色差超構(gòu)透鏡的幅面尺寸較小[76],因此有人提出使用空間孔徑復(fù)用的超透鏡陣列進(jìn)行光場(chǎng)成像,有望實(shí)現(xiàn)大孔徑高分辨成像,為緊湊型光場(chǎng)三維成像設(shè)備的實(shí)現(xiàn)提供了新途徑。
2019年,Lin等[77]通過(guò)合理調(diào)節(jié)納米柱和納米孔的結(jié)構(gòu)參數(shù)進(jìn)行相位設(shè)計(jì),實(shí)現(xiàn)了補(bǔ)償縱向色差的可見(jiàn)光寬帶消色差超構(gòu)透鏡。通過(guò)空間孔徑復(fù)用制造60×60的超構(gòu)透鏡陣列,用于可見(jiàn)光全彩成像的光場(chǎng)相機(jī),可在傳感器上生成全彩色的元素陣列圖像,再通過(guò)計(jì)算機(jī)圖像渲染,拼接出具體不同焦深的多幅圖像,最后使用算法估計(jì)出深度信息。整個(gè)過(guò)程計(jì)算量較小,能夠進(jìn)行動(dòng)態(tài)實(shí)時(shí)深度感知,如圖5(a)所示。雖然光場(chǎng)成像可以使超構(gòu)透鏡實(shí)現(xiàn)更高分辨率的成像,但是空間分辨率和角度分辨率相互制約,而圖像傳感器的總像素?cái)?shù)量有限,所以光場(chǎng)成像的最終圖像分辨率仍然較低。2020年,Park等[78]提出了一種基于偏振復(fù)用介電超構(gòu)表面的虛擬移動(dòng)超構(gòu)透鏡陣列(VMMA),它在不進(jìn)行物理移動(dòng)的情況下,通過(guò)簡(jiǎn)單地調(diào)整入射光束的偏振態(tài)來(lái)實(shí)現(xiàn)采樣位置的橫向移動(dòng),如圖5(b)所示。通過(guò)設(shè)計(jì)超構(gòu)透鏡的相位分布實(shí)現(xiàn)偏振復(fù)用,使得每個(gè)超構(gòu)透鏡單元在不同偏振光入射時(shí)焦點(diǎn)產(chǎn)生移位。成像時(shí)采樣間隔減半,在不犧牲角分辨率的情況下,采樣分辨率增加了2倍,再通過(guò)算法擬合圖像,光場(chǎng)圖像信息量通過(guò)時(shí)分復(fù)用移位方案增加了4倍,最終圖像分辨率增加4倍,并且深度信息不會(huì)退化。光場(chǎng)成像常用于三維顯微成像中,使許多生物和臨床應(yīng)用成為可能。單粒子跟蹤(Single Particle Tracking,SPT)[79]是研究生物動(dòng)態(tài)過(guò)程的顯微成像技術(shù),它使用基于微透鏡陣列的光場(chǎng)成像可以實(shí)現(xiàn)三維SPT[6],但是受到光傳播時(shí)衍射效應(yīng)的限制,在橫向分辨率和焦深之間存在衍射強(qiáng)加的折中關(guān)系,難以在相對(duì)較大深度范圍內(nèi)進(jìn)行高分辨率光學(xué)成像。2019年,Brongesma等[80]提出了一種實(shí)現(xiàn)三維單粒子跟蹤的光場(chǎng)超構(gòu)表面,通過(guò)相位復(fù)用設(shè)計(jì)了具有相同軸向焦距的三焦點(diǎn)超構(gòu)透鏡,單次拍攝下生成3幅單個(gè)珠子的不同圖像,如圖5(c)所示。該光場(chǎng)超構(gòu)表面可以適配未經(jīng)修改的顯微鏡,以更高的空間分辨率收集3D信息,克服了基于光場(chǎng)的方法在空間分辨率方面的損失,唯一的代價(jià)就是犧牲了FOV。三維顯微成像的目標(biāo)非常小,因此減少FOV并不是關(guān)鍵問(wèn)題。在0.5 mm×0.5 mm×0.3 mm體積內(nèi)進(jìn)行多個(gè)熒光粒子的同時(shí)跟蹤,該方法具有亞微米水平和微米水平軸向分辨率。

圖5 基于超構(gòu)表面透鏡陣列的三維成像Fig.5 Three-dimensional imaging based on metasurfaces-lens array
超構(gòu)透鏡陣列在其他三維成像中也有所應(yīng)用,Liu等[81]使用基于幾何相位的結(jié)構(gòu)單元設(shè)計(jì)了3個(gè)六邊形的TiO2超構(gòu)透鏡形成陣列,實(shí)現(xiàn)了緊湊型像差校正的三維定位設(shè)備。3個(gè)超構(gòu)透鏡分別成3個(gè)圖像,使用互相關(guān)的梯度下降算法對(duì)它們進(jìn)行單色像差校正以提高成像質(zhì)量,再分析匹配3個(gè)圖像的平移關(guān)系獲取深度信息,如圖5(d)所示。總尺寸為379.5μm的超構(gòu)透鏡陣列能實(shí)現(xiàn)水平和垂直定位,且具有較高的相對(duì)定位精度(0.60%~1.31%),如圖5(c)所示。當(dāng)使用更大數(shù)值孔徑(NA)的超構(gòu)透鏡時(shí),可以進(jìn)一步提高定位精度,在小型化定位系統(tǒng)和高精度緊湊型視覺(jué)傳感器中具有應(yīng)用潛力。透明樣品的定量相位成像(Quantitative Phase Imaging,QPI)[82]在多種生物醫(yī)學(xué)應(yīng)用中發(fā)揮著至關(guān)重要的作用,如即時(shí)護(hù)理和體內(nèi)應(yīng)用等。QPI系統(tǒng)通常需要設(shè)置干涉來(lái)檢索相位信息,光學(xué)系統(tǒng)復(fù)雜而龐大,使得微型QPI顯微鏡直到現(xiàn)在仍然不可實(shí)現(xiàn)。Kwon等[83]提出了一種具有3個(gè)優(yōu)化超構(gòu)透鏡的雙平面光學(xué)系統(tǒng)(QPGM)用于相位顯微成像。該系統(tǒng)充分利用了超構(gòu)表面的偏振和空間復(fù)用功能,垂直級(jí)聯(lián)了兩個(gè)超構(gòu)表面層,可同時(shí)捕獲3種不同的干涉圖樣,再通過(guò)反演得到3張相位,使用三步移相算法的相位檢索方法[84],通過(guò)差分干涉對(duì)比提取定量的相位梯度信息,進(jìn)而提取樣品的亞微米尺度軸向分辨率的高度信息,如圖5(e)所示。
2.2.2 單透鏡型三維成像
在基于透鏡陣列的三維成像中,通常需要將透鏡按照基線間距進(jìn)行排布,以滿足深度測(cè)量的精度,這無(wú)疑增大了系統(tǒng)的體積。透鏡陣列三維成像獲取多幅圖像后通過(guò)算法處理得到深度信息,處理的數(shù)據(jù)量較大,時(shí)效性較差。在系統(tǒng)體積和數(shù)據(jù)量方面,單透鏡型三維成像系統(tǒng)顯得更具優(yōu)勢(shì)。單透鏡三維成像技術(shù)主要是通過(guò)離焦的方式,根據(jù)PSF隨物方深度的變化來(lái)獲取深度信息。傳統(tǒng)離焦法通過(guò)鏡頭的物理移動(dòng)獲取焦深圖像序列,需要機(jī)械裝置輔助且測(cè)量精度有限。DOEs可進(jìn)行相位掩膜定制,在透鏡相位之外增加額外的相位,使得PSF具有深度識(shí)別的特性。例如雙螺旋點(diǎn)擴(kuò)散函數(shù)(DH-PSF),設(shè)計(jì)相位掩膜使得成像時(shí)隨深度變化而產(chǎn)生旋轉(zhuǎn)的PSF,通過(guò)分析圖像的功率倒譜,可計(jì)算物體的深度和強(qiáng)度信息。但是,目前的DH-PSF存在效率低、體積龐大且難以集成的缺點(diǎn)。
超構(gòu)表面靈活的相位設(shè)計(jì)結(jié)合計(jì)算成像等圖像處理方法進(jìn)行輔助,可以實(shí)現(xiàn)更加快速和高精度的單透鏡離焦法三維成像。Guo等[85]通過(guò)空間孔徑共享在單個(gè)超構(gòu)透鏡上設(shè)計(jì)了2種不同焦距的透鏡相位分布,可在橫向和縱向分離的不同空間位置形成兩幅具有不同散焦屬性和透視關(guān)系的圖像,再通過(guò)簡(jiǎn)單的算法對(duì)齊圖像,提取目標(biāo)的二維深度圖。如圖6(a)所示,直徑為3 mm的超構(gòu)透鏡可測(cè)量10 cm距離內(nèi)的深度,每個(gè)輸出像素使用少于700個(gè)浮點(diǎn)運(yùn)算,并且僅涉及25×25個(gè)像素空間領(lǐng)域,因此計(jì)算數(shù)據(jù)量較小,可實(shí)現(xiàn)實(shí)時(shí)深度計(jì)算。如圖6(a)所示,在不同真實(shí)場(chǎng)景下進(jìn)行深度測(cè)量實(shí)驗(yàn),超構(gòu)透鏡可以對(duì)蠟燭火焰等動(dòng)態(tài)透明物體進(jìn)行深度測(cè)量,證明了其深度測(cè)量的優(yōu)異性能。超構(gòu)透鏡在成像時(shí)色散嚴(yán)重,這種色散會(huì)影響成像質(zhì)量,許多研究都是盡力消除色散,但是色散也可以作為額外自由度輔助計(jì)算三維成像。Tan等[86]利用超構(gòu)透鏡對(duì)不同波長(zhǎng)的光線具有不同光焦度的特性,提出了緊湊、單次和被動(dòng)的3D成像相機(jī)。超構(gòu)透鏡將不同波段的RGB三色光聚焦在不同深度的散焦圖像上,再通過(guò)兩個(gè)卷積神經(jīng)網(wǎng)絡(luò)U-Net進(jìn)行圖像重建,恢復(fù)出深度圖和RGB紋理信息,如圖6(b)所示。在可見(jiàn)光譜下,對(duì)直徑為1 mm的超透鏡進(jìn)行數(shù)值模擬,結(jié)果表明它能夠捕獲0.12~0.6 m的3D深度信息和紋理信息。
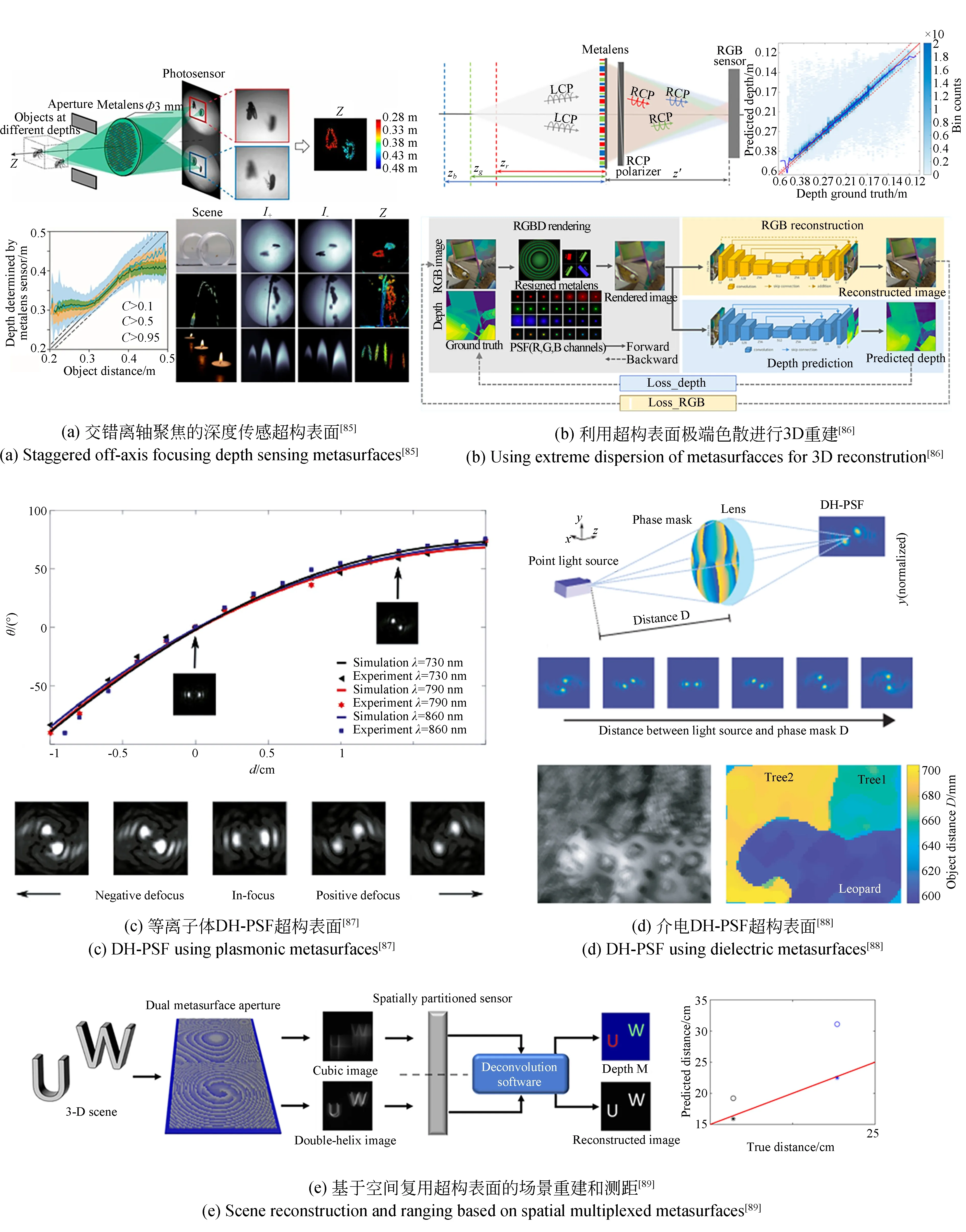
圖6 超構(gòu)表面用于基于離焦深度的三維成像Fig.6 Metasurfaces for three-dimensional imaging based on defocus from depth
超構(gòu)表面獨(dú)特的相位設(shè)計(jì)功能,可突破傳統(tǒng)DH-PSF的瓶頸,實(shí)現(xiàn)緊湊型DH-PSF離焦深度成像系統(tǒng)。Jin等[87]根據(jù)幾何相位原理設(shè)計(jì)了透鏡會(huì)聚相位掩模與DH-PSF相位掩模相互組合的等離子體超構(gòu)表面,極大縮小了DH-PSF元件的體積。如圖6(c)所示,軸上單物點(diǎn)和軸外雙物點(diǎn)的成像和深度在120°的大范圍內(nèi)近似保持線性關(guān)系,有效深度約為20 cm,深度測(cè)量的分辨率為6(°)/cm,其傳輸效率為70.3%,能夠在可見(jiàn)光波段和多個(gè)入射偏振態(tài)下工作。但是金屬存在的歐姆損耗限制了透射效率,于是Jin等[88]設(shè)計(jì)了基于全電介質(zhì)的DH-PSF集成惠更斯超構(gòu)透鏡。利用共振惠更斯圓柱形的硅(Si)納米柱陣列對(duì)超構(gòu)透鏡以及DH-PSF進(jìn)行物理相位編碼。在近紅外波段實(shí)現(xiàn)了高透射率,通過(guò)DHPSF的旋轉(zhuǎn)角度可以推斷出距離信息,如圖6(d)所示。但是DH-PSF只適用于近軸衍射波,所以導(dǎo)致其存在軸向分辨率低,數(shù)值孔徑低和視場(chǎng)角小等問(wèn)題。為了提高DH-PSF獲取的二維強(qiáng)度圖和深度圖的分辨率,Colburn等[89]將三次方相位掩模和DH-PSF相位掩模并列排放于單個(gè)超構(gòu)表面,能在可見(jiàn)光波段對(duì)場(chǎng)景中的深度信息被動(dòng)編碼成兩個(gè)互補(bǔ)PSF,通過(guò)同時(shí)產(chǎn)生聚焦加速光束和聚焦旋轉(zhuǎn)光束來(lái)擴(kuò)展景深并提高精度,最后對(duì)捕獲的數(shù)據(jù)進(jìn)行反卷積解碼,重建出二維強(qiáng)度圖和深度圖,計(jì)算視場(chǎng)上Gouy相位的變化來(lái)估計(jì)超構(gòu)表面的場(chǎng)曲,測(cè)距誤差僅為1.7%,如圖6(e)所示。
3 超構(gòu)表面在三維顯示領(lǐng)域的應(yīng)用
隨著人們生活水平的不斷提高,傳統(tǒng)二維顯示設(shè)備已經(jīng)無(wú)法滿足人們的觀看需求,三維顯示是未來(lái)顯示設(shè)備的發(fā)展趨勢(shì)。三維顯示設(shè)備主要有裸眼3D顯示屏和近眼3D顯示器,它們追求的性能目標(biāo)是大視場(chǎng)、連續(xù)視差、輕薄化和小型化等,現(xiàn)有的三維顯示設(shè)備還無(wú)法同時(shí)具備這些性能[90]。超構(gòu)表面具有良好的光束波前操縱能力和多功能輕薄集成的優(yōu)點(diǎn),能作為三維顯示設(shè)備的關(guān)鍵光學(xué)器件,例如多焦點(diǎn)[91]以及功能集成[92]的超構(gòu)表面等,為開(kāi)發(fā)性能更優(yōu)的新型緊湊型三維顯示設(shè)備提供了新途徑。
3.1 三維全息顯示
傳統(tǒng)的光學(xué)全息術(shù)需要復(fù)雜的拍攝過(guò)程來(lái)記錄目標(biāo)物體的光束干涉圖案和參考路徑,難以實(shí)現(xiàn)虛擬物體的全息重建[93]。1966年,Brown和Lohman發(fā)明了計(jì)算機(jī)生成全息(Computer Generated Holography,CGH),使用物理光學(xué)理論來(lái)生成干涉圖案[94]。CGH需要復(fù)雜的光場(chǎng)調(diào)制能力,可以使用SLM等數(shù)字光場(chǎng)調(diào)制器進(jìn)行全息顯示[95],但是像素尺寸大,調(diào)制原理存在固有缺陷。超構(gòu)表面擁有強(qiáng)大的光場(chǎng)調(diào)制能力,可以用于生成全息圖,即通過(guò)物理和數(shù)字理論計(jì)算,并根據(jù)設(shè)計(jì)的相位分布排列超構(gòu)表面的結(jié)構(gòu)單元,組成目標(biāo)CGH圖案。與傳統(tǒng)的CGH調(diào)制設(shè)備相比,超構(gòu)表面設(shè)計(jì)全息圖具有自由度大、空間分辨率高、噪聲低、空間帶寬積寬,以及消除多級(jí)衍射等優(yōu)點(diǎn)[96]。Huang等[97]于2013年使用基于幾何相位的等離子體超構(gòu)表面首次實(shí)現(xiàn)軸上3D超全息圖,消除了傳統(tǒng)全息術(shù)多級(jí)衍射的影響,具有寬視場(chǎng)和高分辨率的優(yōu)勢(shì)。首先,通過(guò)數(shù)字合成和數(shù)字計(jì)算生成3D CGH,然后再根據(jù)超構(gòu)表面幾何相位的原理,將3D CGH的相位信息編碼到超構(gòu)表面結(jié)構(gòu)單元陣列中,最后通過(guò)傳統(tǒng)的光傳輸方案重建圖像。如圖7(a)所示,在810 nm波長(zhǎng)的圓偏振光照射下,設(shè)計(jì)制備的噴氣機(jī)3D CGH超構(gòu)表面在軸上重建了噴氣機(jī)的3D全息圖像。調(diào)整物平面遠(yuǎn)離超構(gòu)表面,可以得到一系列2D圖像,可以清晰地看到焦點(diǎn)隨著距離的移動(dòng)而變化,證明了3D全息圖像具有深度信息,但是只限于軸上的深度信息。Li等[98]使用石墨烯氧化物制備超構(gòu)表面創(chuàng)建了寬視角3D全息圖。石墨烯基材料是一種芳香碳原子層,具有出色的電子和光學(xué)特性。采用單飛秒脈沖光束對(duì)石墨烯氧化物進(jìn)行非熱還原,可以調(diào)制多級(jí)折射率,然后根據(jù)3D寬視角圖像的全息相關(guān)性編寫相位調(diào)制。如圖7(b)所示,將高數(shù)值孔徑(NA)物鏡和超構(gòu)表面結(jié)合,使每個(gè)焦點(diǎn)的尺寸減小到重建光束的亞波長(zhǎng)尺度,從而增加視角。當(dāng)像素尺寸減小到0.55μm時(shí),視角增加到52°。
根據(jù)RGB波長(zhǎng)多路復(fù)用可組合成彩色3D圖像,但是在實(shí)現(xiàn)全彩全息時(shí),工作帶寬的增大會(huì)產(chǎn)生嚴(yán)重的串?dāng)_,影響全息圖像質(zhì)量。因此,如何在寬波段下減少不同顏色之間的串?dāng)_成為實(shí)現(xiàn)彩色3D全息的關(guān)鍵。Xiong等[99]提出了一種克服串?dāng)_的新方法,設(shè)計(jì)了單一類型等離子體超構(gòu)表面,將離軸照明方法應(yīng)用到超構(gòu)表面全息術(shù)中,不同波長(zhǎng)的激光束斜射在由納米狹縫天線形成的超構(gòu)表面上,然后將設(shè)計(jì)角度的輸出光束疊加以形成最終的多色圖像,并且克服了不同顏色之間的基本串?dāng)_。如圖7(c)所示,通過(guò)實(shí)驗(yàn)展示了在立體空間中重建全彩色超全息圖像,3D對(duì)象由RGB點(diǎn)源集合表示,然后將全息圖平面上的復(fù)振幅計(jì)算為由所有點(diǎn)源組成的整個(gè)3D物體的光場(chǎng)疊加,設(shè)計(jì)了一個(gè)由20個(gè)不同顏色光點(diǎn)組成的3D彩色螺旋圖案。在z軸的不同位置使用CCD相機(jī)捕獲全息圖案,可以獲得顏色不同的星圖,驗(yàn)證了3D圖像的深度信息。這些使用超構(gòu)表面生成3D全息的研究大多數(shù)是通過(guò)多幅2D全息圖像拼接成3D全息圖像,其圖像的角度是固定的,無(wú)法在多個(gè)視角下觀察到3D圖像,使得其在三維顯示領(lǐng)域的應(yīng)用受到限制。Choi等[100]于2020年提出了一種能提供雙目深度線索的超構(gòu)表面立體全息技術(shù)。如圖7(d)所示(彩圖見(jiàn)期刊電子版),超構(gòu)表面由幾個(gè)全息圖塊(綠色和藍(lán)色框)組成,根據(jù)不同的觀察方向(綠色和藍(lán)色箭頭)顯示目標(biāo)3D對(duì)象相應(yīng)的2D全息投影。渲染了一個(gè)由3條桿組成的3D結(jié)構(gòu),體積為25 μm×25μm×25μm,這3條桿位于不同的深度:上桿、中桿和下桿分別位于z軸上相對(duì)于目標(biāo)結(jié)構(gòu)中心的-12.5,0和+12.5μm處。超構(gòu)表面重建的3D全息圖由多張全息圖片段組成,沿平行于x軸的子午線的觀察角度生成目標(biāo)3D結(jié)構(gòu)的2D投影,從-30~+30°的觀察角度以10°的步長(zhǎng)渲染出透視投影,實(shí)現(xiàn)了具有雙目深度線索的立體效果,如圖7(d)所示。

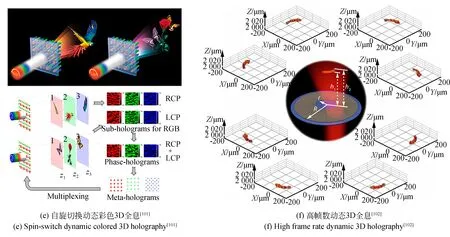
圖7 超構(gòu)表面用于3D全息顯示Fig.7 Metasurfaces for 3D holographic display
隨著靜態(tài)全息技術(shù)的成熟,人們開(kāi)始研究動(dòng)態(tài)全息,實(shí)現(xiàn)動(dòng)態(tài)的3D全息是全息顯示的最終目標(biāo)。Hang等[101]提出了一種自旋切換全息3D全彩場(chǎng)景的介質(zhì)超構(gòu)表面,其超分子由3種不同的超原子組成,能夠獨(dú)立調(diào)制紅光、綠光和藍(lán)光。通過(guò)改進(jìn)的G-S算法檢索3D全息圖的波前,設(shè)計(jì)超構(gòu)表面的相位分布,實(shí)現(xiàn)改變照明圓偏振光的螺旋度來(lái)切換重建的全息3D全彩圖像,大大增加了設(shè)備的信息容量。如圖7(e)所示,使用633,532和473 nm波長(zhǎng)重疊的激光束組成的右旋圓偏振光照射超構(gòu)表面,會(huì)出現(xiàn)3D全彩鸚鵡。當(dāng)右旋圓偏振光照明切換到左旋圓偏振光時(shí),圖像會(huì)變成一朵帶蝴蝶的花朵。這兩個(gè)3D場(chǎng)景都被分成了3個(gè)切片,鸚鵡(花蝴蝶)的前翅(第一只蝴蝶)、身體(花)和后翅(第二只蝴蝶)分別在距離超構(gòu)表面5,7和9 mm處生成。在可見(jiàn)光下實(shí)現(xiàn)高幀數(shù)的動(dòng)態(tài)3D全息是實(shí)現(xiàn)三維顯示最理想的效果。2020年,Gao等[102]提出了一種基于空間通道多路復(fù)用的大幀數(shù)高幀率的可見(jiàn)光動(dòng)態(tài)3D超構(gòu)表面全息,可以實(shí)現(xiàn)228個(gè)不同的全息幀和可見(jiàn)光范圍內(nèi)極高幀速率的動(dòng)態(tài)全息顯示。如圖7(f)所示,一個(gè)環(huán)形的全息超構(gòu)表面具有8個(gè)空間通道,每個(gè)空間通道在立體空間中重構(gòu)一個(gè)3D箭頭,使用激光束依次照射每個(gè)空間通道,可以進(jìn)行平滑的動(dòng)態(tài)3D全息顯示。
3.2 光場(chǎng)顯示
光場(chǎng)顯示使用折射透鏡組成的光場(chǎng)調(diào)制器件,將編碼的光場(chǎng)信息投射到空間中的不同方向,形成具有連續(xù)視差的真實(shí)光場(chǎng)3D場(chǎng)景,被認(rèn)為是目前最具前景的裸眼3D顯示技術(shù)之一[103]。然而,傳統(tǒng)折射微透鏡的像差嚴(yán)重影響了重建3D場(chǎng)景的觀看質(zhì)量,而具有容許像差的小焦距微透鏡需要級(jí)聯(lián)多個(gè)光學(xué)元件,制造的難度、復(fù)雜度,質(zhì)量和體積都會(huì)增大。超構(gòu)表面作為新型的平面光學(xué)元件,能以亞波長(zhǎng)空間分辨率進(jìn)行波前調(diào)制,并具有良好的像差校正能力,有望彌補(bǔ)傳統(tǒng)光場(chǎng)顯示的不足。Zhang等[104]設(shè)計(jì)了一種兩層相鄰的電介質(zhì)超構(gòu)透鏡陣列用于光場(chǎng)顯示。兩層超構(gòu)透鏡具有不同的相位分布,分別對(duì)不同偏振旋向的入射光進(jìn)行調(diào)制,提供了更大的優(yōu)化自由度,在離軸入射時(shí)具有更好的成像性能。但是仍然需要權(quán)衡空間分辨率與角度分辨率之間的關(guān)系。Zhang等[105]結(jié)合幾何相位和傳播相位設(shè)計(jì)了偏振復(fù)用的雙功能超透鏡陣列并用于近眼光場(chǎng)顯示器。如圖8(a)所示,焦距和間距可以根據(jù)入射光的偏振狀態(tài)進(jìn)行切換,進(jìn)而調(diào)整觀察分辨率和出瞳直徑,提高了靈活性。這些超構(gòu)透鏡陣列光場(chǎng)顯示只能在單一波長(zhǎng)下實(shí)現(xiàn),不滿足人眼的全彩顯示需求。Fan等[106]設(shè)計(jì)了一種寬帶消色差氮化硅(SiN)超透鏡陣列,在白光下用于光場(chǎng)顯示中重建全彩的3D場(chǎng)景。如圖8(b)所示,“3”和“D”的3D場(chǎng)景用算法編碼,然后在光場(chǎng)顯示的過(guò)程中重建具有深度信息的圖像,并隨著聚焦位置的變化而逐漸清晰和模糊。超構(gòu)透鏡陣列包含60×60個(gè)偏振不敏感的超構(gòu)透鏡,每個(gè)超構(gòu)透鏡中的納米單元都經(jīng)過(guò)精心設(shè)計(jì),有效消色差折射率分布在430~780 nm,具有近衍射聚焦的分辨率。此外,該消色差超構(gòu)透鏡陣列僅由單層超薄厚度為400 nm的氮化硅層組成,適合片上混合CMOS集成和光電子信息的并行處理。

圖8 超構(gòu)表面用于光場(chǎng)顯示Fig.8 Metasurfaces for light field display
裸眼3D顯示器是最符合人眼觀看習(xí)慣的理想顯示設(shè)備,但是其研制目前還存在許多技術(shù)難題。全息3D顯示所需的信息量太大,使用現(xiàn)代電子設(shè)備難以實(shí)現(xiàn)有效傳輸,導(dǎo)致全息3D顯示器的刷新速率和FOV有限。光場(chǎng)3D顯示作為全息3D的采樣形式,可以極大減小數(shù)據(jù)量,是目前實(shí)現(xiàn)3D顯示器的最佳選擇。Qiao等[107]提出了一種裸眼全息采樣3D顯示,采用超構(gòu)表面光柵調(diào)制每個(gè)像素點(diǎn)的相位信息形成聚合視點(diǎn),改善了串?dāng)_和邊界調(diào)節(jié)沖突帶來(lái)的視覺(jué)不適。當(dāng)視點(diǎn)緊密排列時(shí),全息采樣3D顯示可以近似為一個(gè)連續(xù)的光場(chǎng),即光場(chǎng)3D顯示,使用二維光柵和納米壓印手段制備了大規(guī)模超構(gòu)表面光柵視場(chǎng)調(diào)制器,并與平板顯示器兼容構(gòu)建了3D顯示屏,在LED白光照明下實(shí)現(xiàn)高刷新率且無(wú)視覺(jué)疲勞的動(dòng)態(tài)全彩3D顯示,如圖8(c)所示。但是現(xiàn)有的顯示面板的分辨率有限,光場(chǎng)3D顯示的空間分辨率、角度分辨率和視角之間會(huì)相互制約。例如,要實(shí)現(xiàn)具有1K空間分辨率和3°垂直和水平方向角度分辨率的3D顯示,需要具有50K分辨率的顯示面板來(lái)實(shí)現(xiàn)150°的視角,現(xiàn)有的顯示面板難以滿足分辨率要求。Qiao等[108]提出并制備了一種具有空間變異分辨率的光場(chǎng)3D顯示屏,它由具有不同形狀的超構(gòu)表面光柵混合排布而成。根據(jù)觀察頻率投射空間變化的信息,即密集封裝的視圖排列在中心,而稀疏排列的視圖分布在外圍,在中心視角區(qū)域能夠呈現(xiàn)平滑過(guò)渡運(yùn)動(dòng)視差的高分辨率圖像效果,而在外圍視角則采樣分辨率低,但是增大了視角,如圖8(d)所示。這種方法抑制了冗余的深度信息并將FOV擴(kuò)大到與2D顯示面板相當(dāng)?shù)姆秶ㄟ^(guò)演示具有視頻速率的全彩色3D顯示器,水平視角達(dá)到了160°。
3.3 近眼顯示
AR及VR近眼顯示設(shè)備作為下一代交互式顯示設(shè)備,面臨著視野(FOV)、眼眶、角度分辨率、動(dòng)態(tài)范圍和正確的深度提示等性能上的挑戰(zhàn)。為了提供友好的佩戴體驗(yàn),AR和VR追求輕量級(jí)的緊湊型外形。然而,上述要求往往需要相互權(quán)衡,這使得高性能AR/VR眼鏡的設(shè)計(jì)特別具有挑戰(zhàn)性。
超構(gòu)表面具有任意波前整形能力以及超輕超薄的優(yōu)點(diǎn),能用于實(shí)現(xiàn)性能更加完善且輕薄的近眼顯示設(shè)備,因此成為AR/VR領(lǐng)域的研究熱點(diǎn)。2018年,Lee等[109]開(kāi)發(fā)了一款使用超構(gòu)表面目鏡的AR近眼顯示系統(tǒng),具有超寬FOV、全彩成像、高分辨率和大眼眶的優(yōu)勢(shì)。該超構(gòu)表面基于幾何相位和介電材料進(jìn)行設(shè)計(jì),實(shí)現(xiàn)了虛擬圖像投影和透明度控制。如圖9(a)所示,系統(tǒng)由超構(gòu)表面目鏡、光束投影儀、4f中繼系統(tǒng)、分束器、二向色鏡和圓偏振器組成,通過(guò)實(shí)驗(yàn)演示了3D全息AR顯示,將圖像浮動(dòng)顯示在空間中,圖像隨著焦點(diǎn)的變化變得清晰和模糊。隨著元宇宙概念的提出,對(duì)VR顯示設(shè)備提出了更高的性能要求。為了解決超構(gòu)表面的色差問(wèn)題,Capasso團(tuán)隊(duì)[110]利用來(lái)自多個(gè)區(qū)域的光進(jìn)行相長(zhǎng)干涉和色散工程來(lái)實(shí)現(xiàn)原色的衍射限制,設(shè)計(jì)了消色差聚焦的超構(gòu)透鏡,并將它應(yīng)用于VR系統(tǒng),實(shí)現(xiàn)了緊湊型的光纖掃描近眼顯示器。VR效果展示如圖9(b)所示,通過(guò)向聲光調(diào)制器施加多級(jí)電壓來(lái)創(chuàng)建3D效果的灰度圖像。該超構(gòu)透鏡也可用于AR顯示,通過(guò)光學(xué)組合器混合虛擬對(duì)象和現(xiàn)實(shí)場(chǎng)景,設(shè)計(jì)多焦點(diǎn)的RGB消色差超構(gòu)透鏡來(lái)生成深度線索,使得成像效果更加真實(shí)立體。AR和VR的近眼顯示器存在輻輳調(diào)節(jié)沖突,嚴(yán)重影響觀看的舒適度,因此Song等[111]針對(duì)這些問(wèn)題,開(kāi)發(fā)了大出瞳的緊湊型全息3D顯示器。該顯示器具有10 mm×8.66 mm的大出射光瞳,能夠渲染具有約50K活動(dòng)數(shù)據(jù)點(diǎn)和0.5~2 m連續(xù)深度的3D場(chǎng)景,并以AR方式與現(xiàn)實(shí)世界重疊,同時(shí)提供視差和調(diào)節(jié)線索,解決當(dāng)前3D顯示器存在的會(huì)聚-調(diào)節(jié)沖突,如圖9(c)所示。

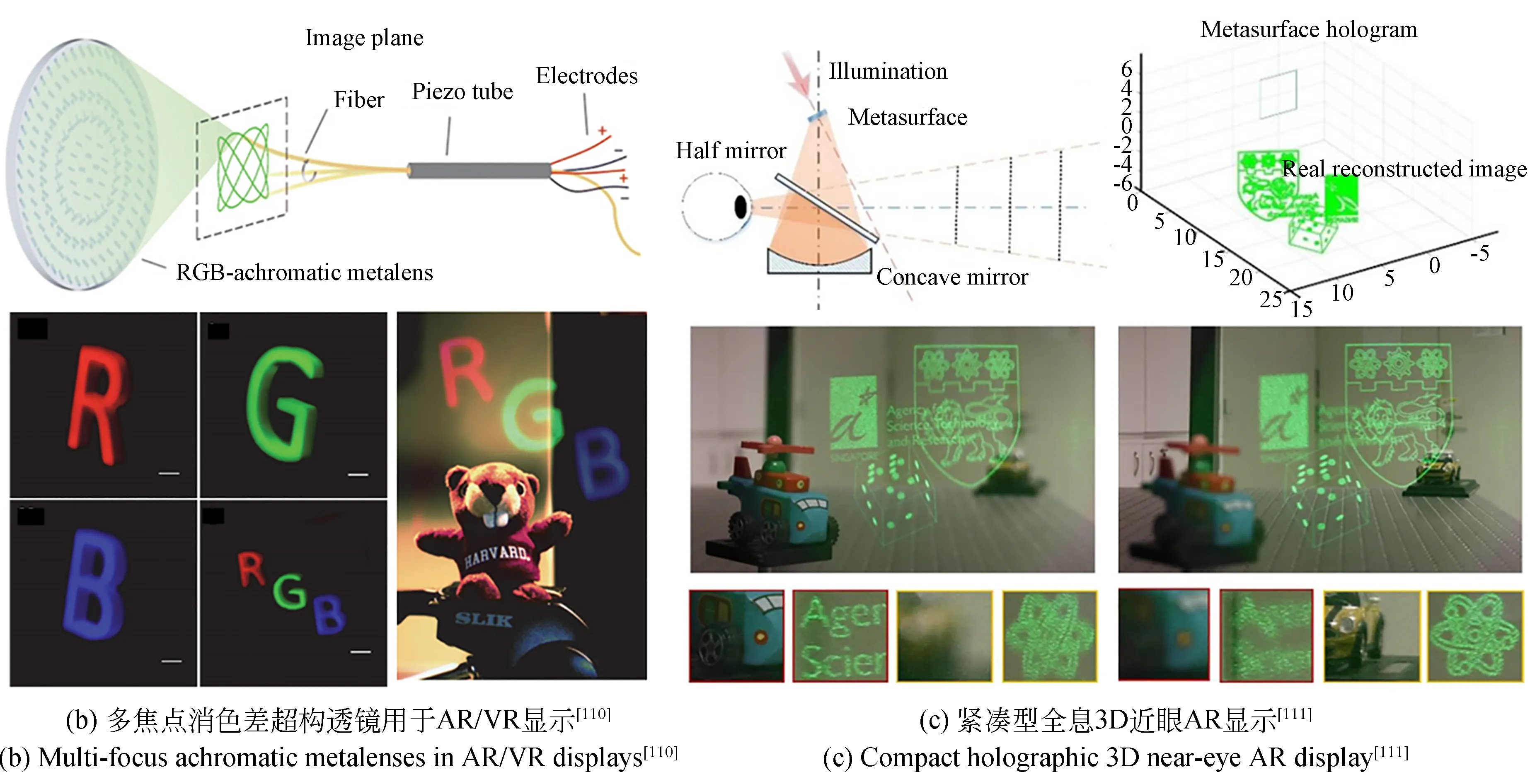
圖9 超構(gòu)表面用于近眼顯示Fig.9 Metasurfaces for near-eye display
4 總結(jié)與展望
本文重點(diǎn)介紹了超構(gòu)表面在三維成像與顯示技術(shù)領(lǐng)域的應(yīng)用進(jìn)展。當(dāng)前三維成像與顯示技術(shù)受到傳統(tǒng)光學(xué)元件的限制,存在體積龐大和不同性能之間相互制約等問(wèn)題。超構(gòu)表面作為新型的平面光學(xué)調(diào)制器件,具有靈活的光場(chǎng)調(diào)控能力以及多功能、輕薄和易集成的優(yōu)勢(shì),在三維成像與顯示領(lǐng)域具有廣闊的應(yīng)用前景。在主動(dòng)式三維成像中,超構(gòu)表面作為點(diǎn)云投射器件,有利于產(chǎn)生大視角、高效率和強(qiáng)度均勻的點(diǎn)云陣列;作為光束掃描器件,可以實(shí)現(xiàn)動(dòng)態(tài)的大范圍掃描,無(wú)需輔助的機(jī)械部件;作為顯微系統(tǒng)的斷層掃描器件,有利于對(duì)動(dòng)態(tài)生物標(biāo)本進(jìn)行快速實(shí)時(shí)成像。在被動(dòng)式三維成像中,超構(gòu)表面的色差校正以及近衍射極限聚焦功能可以實(shí)現(xiàn)高質(zhì)量的緊湊型光場(chǎng)成像和離焦成像設(shè)備。在三維顯示領(lǐng)域,超構(gòu)表面作為關(guān)鍵光學(xué)器件,在高性能和輕薄型三維顯示設(shè)備中發(fā)揮了巨大的優(yōu)勢(shì)。
雖然超構(gòu)表面在三維成像與顯示領(lǐng)域的研究取得了豐厚的成果,但是仍然面臨許多挑戰(zhàn)。在點(diǎn)云投射方面,超構(gòu)表面將入射激光束衍射成點(diǎn)云陣列,仍然存在零級(jí)衍射,衍射效率不夠高和點(diǎn)云數(shù)量不足的缺陷,目前僅能在較短的距離內(nèi)進(jìn)行有效的三維成像,因此需要提升超構(gòu)表面的性能,實(shí)現(xiàn)更高質(zhì)量的光束投射。大多數(shù)超構(gòu)表面實(shí)現(xiàn)的光束掃描方案,只能實(shí)現(xiàn)一維點(diǎn)掃描,并且最大視場(chǎng)僅為商用的最低標(biāo)準(zhǔn),且還未實(shí)現(xiàn)連續(xù)掃描。在被動(dòng)式三維成像和三維顯示領(lǐng)域中,大多數(shù)成像設(shè)備用于可見(jiàn)光波段,因此超構(gòu)透鏡的全彩成像是其中的關(guān)鍵,但是目前的全彩消色差超構(gòu)透鏡的數(shù)值孔徑、效率和帶寬等性能會(huì)相互制約。超構(gòu)表面實(shí)現(xiàn)的三維全息顯示還只是具有深度信息的二維全息圖投影,并不是連續(xù)立體的三維全息。隨著超構(gòu)表面設(shè)計(jì)復(fù)雜度的提高,不同功能通道之間的串?dāng)_問(wèn)題以及效率問(wèn)題仍然有待解決。因此,超構(gòu)表面需要在性能提高和功能拓展等方面不斷改進(jìn)和突破。
超構(gòu)表面的未來(lái)發(fā)展方向包括人工智能賦能的超構(gòu)表面逆向設(shè)計(jì)和可調(diào)諧的多功能集成超構(gòu)表面。近年來(lái),通過(guò)快速電磁仿真方法和學(xué)習(xí)框架的聯(lián)合優(yōu)化,超構(gòu)表面的性能已有所改進(jìn),包括數(shù)值孔徑、工作帶寬和衍射效率等方面的改進(jìn)[112-113]。然而,這些性能之間存在相互制約的關(guān)系,使得超構(gòu)表面透鏡仍難以滿足商業(yè)化需求的高效率、寬視場(chǎng)和寬工作帶寬的消色差成像[114]。發(fā)展人工智能算法輔助超構(gòu)表面的逆向設(shè)計(jì),能夠?qū)崿F(xiàn)具有更高自由度的任意納米單元結(jié)構(gòu)設(shè)計(jì),為超構(gòu)表面的性能優(yōu)化和功能調(diào)控提供更大的設(shè)計(jì)空間,已經(jīng)通過(guò)高級(jí)電磁優(yōu)化[112,114-119]和深度 學(xué)習(xí)[120-122]得到驗(yàn)證。目前,研究人員開(kāi)展了各種功能性超構(gòu)表面光學(xué)系統(tǒng)的研究,例如偏振相機(jī)[123-124]、光譜儀[125]和光場(chǎng)相機(jī)[77,106]等,但 是 現(xiàn)有的超構(gòu)表面功 能 單 一 和 固定,在光學(xué)系統(tǒng)中充當(dāng)光學(xué)器件時(shí)需要較大的空間光路,沒(méi)有發(fā)揮超構(gòu)表面集成化的優(yōu)勢(shì),限制了光學(xué)系統(tǒng)的實(shí)時(shí)性和適用性。主動(dòng)可調(diào)諧多功能集成的超構(gòu)表面是拓展其應(yīng)用場(chǎng)景的關(guān)鍵[126],通過(guò)超構(gòu)表面與活性介質(zhì)和光源等其他元件的片上集成,有望實(shí)現(xiàn)批量生產(chǎn)的芯片級(jí)功能型三維成像與顯示系統(tǒng)。在未來(lái),人工智能賦能的超構(gòu)表面逆向設(shè)計(jì)和可調(diào)諧的多功能集成超構(gòu)表面的研究為三維成像與顯示系統(tǒng)帶來(lái)了超越傳統(tǒng)方法的巨大機(jī)遇,并推動(dòng)光學(xué)系統(tǒng)向著革命性的小型化和多目標(biāo)功能方向發(fā)展。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2022年6期)2022-06-05 06:50:50
快樂(lè)學(xué)習(xí)報(bào)·教育周刊(2022年16期)2022-05-01 21:25:05
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設(shè)與管理(2015年15期)2015-03-20 15:18:57