表貼式永磁同步電機模型預測轉矩控制系統預測模型研究*
2022-09-01 09:35:26李耀華陳桂鑫王孝宇劉子焜劉東梅
電機與控制應用 2022年1期
關鍵詞:模型
李耀華, 陳桂鑫, 王孝宇, 劉子焜, 劉東梅, 任 超
(長安大學 汽車學院,西安 710064)
0 引 言
有限狀態集永磁同步電機(PMSM)模型預測轉矩控制(MPTC)充分利用逆變器開關狀態離散有限的特點,將備選電壓矢量遍歷代入磁鏈和轉矩預測模型,得到下一時刻的磁鏈和轉矩,并通過成本函數將磁鏈、轉矩等控制目標柔性統一,靈活實現多目標協同控制,該控制方式受到了高度關注[1-10]。
磁鏈和轉矩預測模型作為MPTC的核心,對系統的控制性能至關重要。根據表貼式永磁同步電機(SPMSM)的磁鏈和轉矩的預測模型建立方法,可分為基于轉子坐標系的MPTC[11-12]、基于定子磁鏈坐標系的MPTC[13-15]和基于靜止坐標系的MPTC[16-17]。不同磁鏈和轉矩預測模型下,SPMSM MPTC系統的性能有所差異。本文建立了基于轉子磁鏈坐標系、定子磁鏈坐標系和靜止坐標系的SPMSM MPTC系統,進行仿真驗證和對比分析,為SPMSM MPTC的選擇提供參考。
1 基于轉子磁鏈坐標系的SPMSM MPTC
轉子磁鏈坐標系下,SPMSMd軸和q軸定子電壓方程如式(1)和式(2)所示:

(1)

(2)
式中:ud和uq為電機d軸和q軸定子電壓;id和iq為電機d軸和q軸定子電流;Rs為電機定子電阻;ψf為電機永磁體磁鏈;ωr為電機電角速度;Ld和Lq為電機d軸和q軸定子電感。對于SPMSM,d軸和q軸定子電感相等,即定子電感Ls=Ld=Lq。
由于采樣頻率較高,由一階歐拉前向離散公式可得下一時刻的定子d軸和q軸電流的預測值[18],如式(3)和式(4)所示:
(3)

(4)
式中:Ts為采樣周期。
由下一時刻的定子d軸和q軸電流的預測值,則可得下一時刻的定子磁鏈和轉矩預測值,如式(5)~式(8)所示:
ψd(k+1)=Ldid(k+1)+ψf
(5)
ψq(k+1)=Lqiq(k+1)
(6)

(7)
ψq(k+1)id(k+1)]
(8)
式中:p為極數。
由磁鏈和轉矩預測模型可知,下一時刻的定子磁鏈和轉矩預測值由施加的電壓矢量決定。兩電平三相逆變器產生的備選電壓矢量如式(9)所示[19-20]:
us∈{u0,u1,u2,u3,u4,u5,u6}
(9)
式中:零電壓矢量u0可由兩個開關狀態111或000生成,具體選擇由開關次數最小原則來確定。
由于磁鏈和轉矩量綱不同,需要設計和調整權重系數[21-22]。為了消除權重系數,這里將磁鏈和轉矩均轉換為無量綱的磁鏈和轉矩變化率,設計成本函數[23]如式(10)所示:
g=

(10)

由此可得,基于轉子磁鏈坐標系的SPMSM MPTC系統如圖1所示。

圖1 基于轉子磁鏈坐標系的SPMSM MPTC系統
基于MATLAB/Simulink建立SPMSM模型預測控制系統仿真模型。仿真模型為離散模型,采樣周期為5×10-5s。直流母線電壓為312 V。轉速PI調節器參數為KP=5,KI=100,輸出上下限為[-30 N·m,30 N·m]。參考轉速初始為500 r/min,2 s時階躍至-500 r/min。負載轉矩初始為10 N·m,1 s時階躍至-10 N·m,3 s時階躍至10 N·m,仿真總時長為4 s。參考定子磁鏈幅值為0.3 Wb。仿真用SPMSM參數如表1所示。
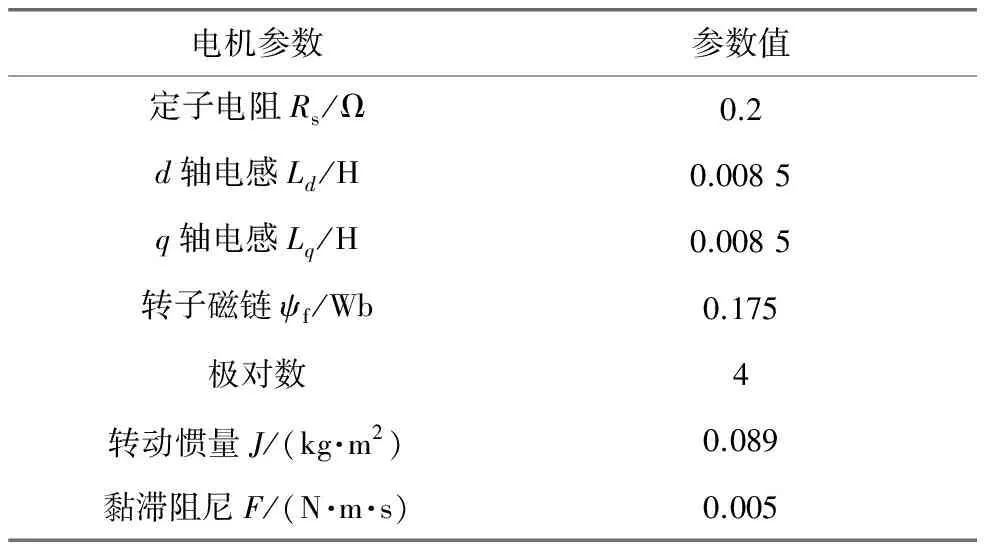
表1 仿真用SPMSM參數
基于轉子磁鏈坐標系的SPMSM MPTC系統仿真結果如圖2~圖4所示。
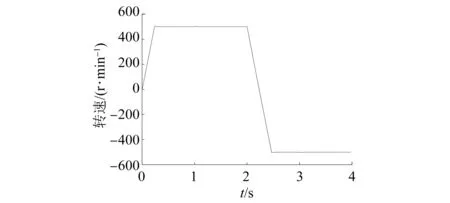
圖2 基于轉子磁鏈坐標系的SPMSM MPTC電機轉速

圖3 基于轉子磁鏈坐標系的SPMSM MPTC電機轉矩
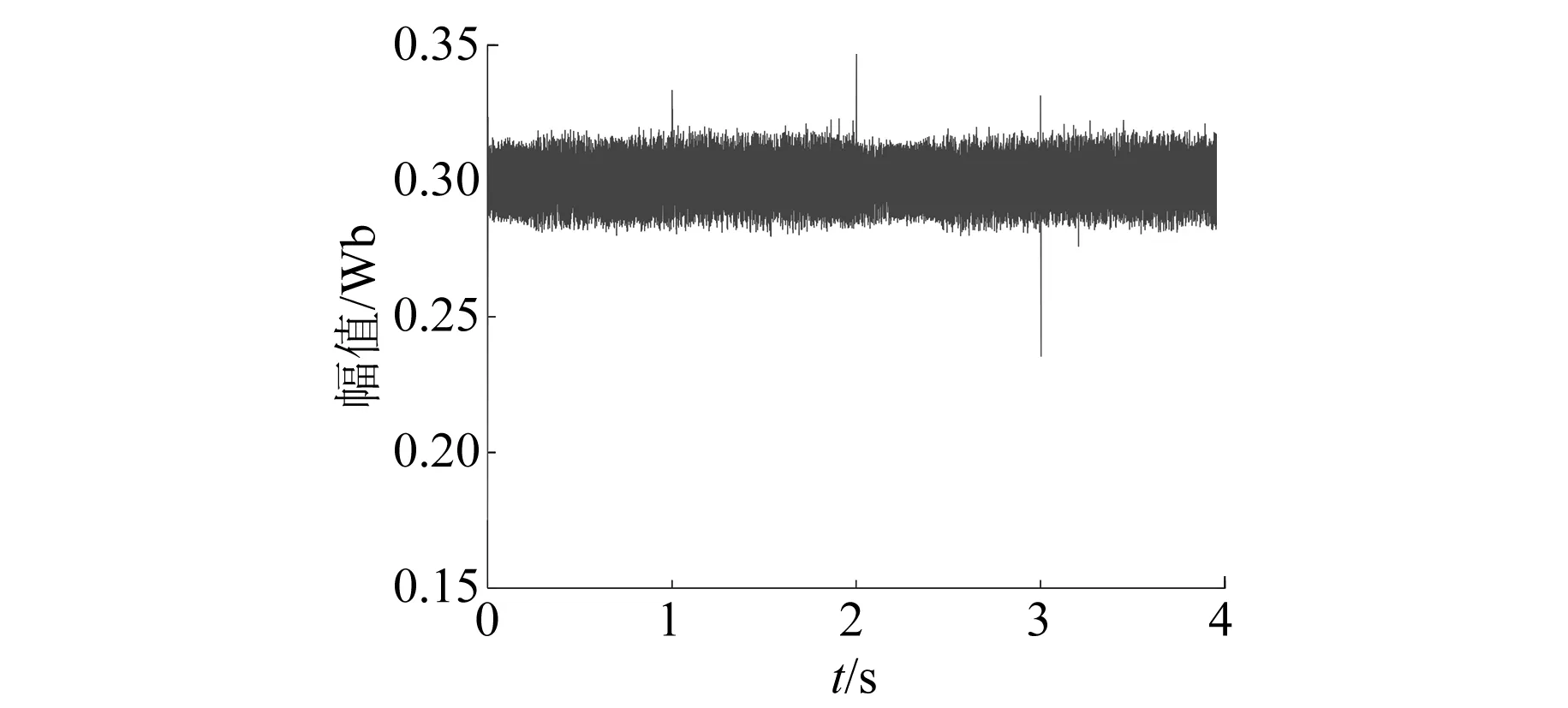
圖4 基于轉子磁鏈坐標系的SPMSM MPTC定子磁鏈幅值
定義轉矩脈動均方根誤差(RMSE)、磁鏈脈動均方根誤差和平均開關頻率fave分別如式(11)~式(13)所示:
(11)
(12)
(13)
式中:n為采樣個數;Nswitching為逆變器上下橋臂通斷總次數;t為仿真總時長。
基于轉子磁鏈坐標系的SPMSM MPTC系統控制性能如表2所示。

表2 基于轉子磁鏈坐標系的電機系統控制性能
2 基于定子磁鏈坐標系的SPMSM MPTC
SPMSM定子磁鏈矢量和轉矩如式(14)、式(15)所示:
(14)
(15)
式中:ψs、us和is分別為定子磁鏈矢量、施加電壓矢量和定子電流矢量;δ為轉矩角,即定子磁鏈與轉子磁鏈夾角。
由式(14)可知,忽略定子電阻壓降,施加電壓矢量一個采樣周期后,定子磁鏈的變化如圖5所示,其中α為施加電壓矢量與定子磁鏈的夾角,Δθs為施加電壓矢量引起的定子磁鏈角度變化。
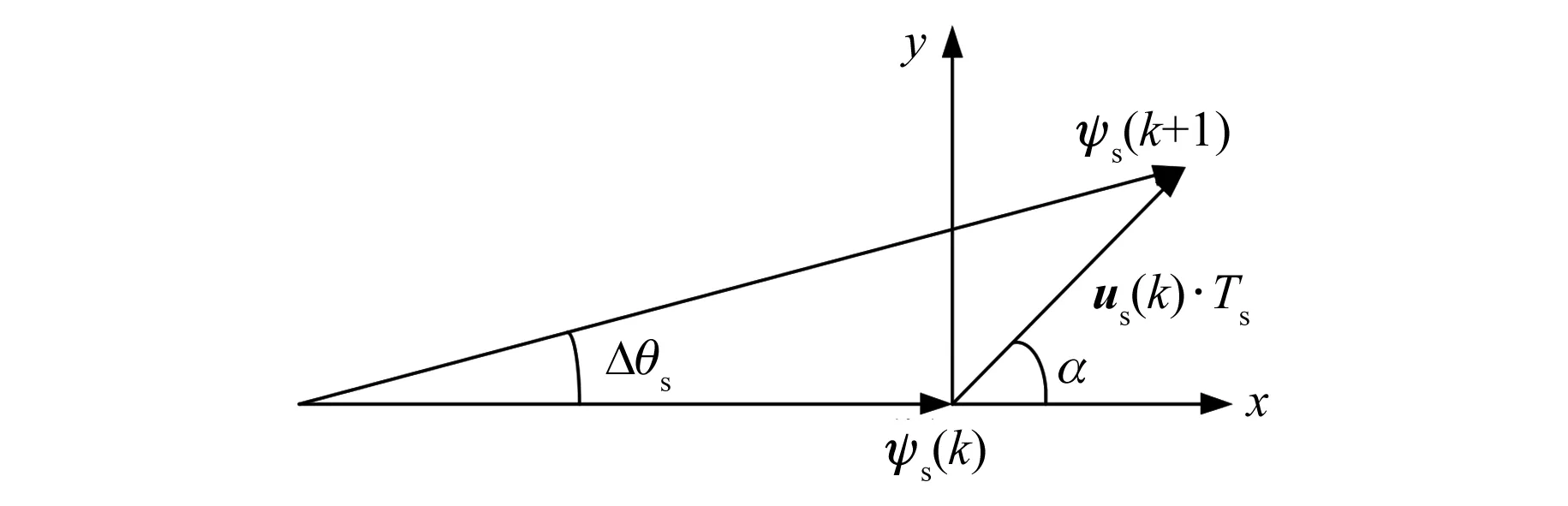
圖5 定子磁鏈變化
由圖5可知,下一時刻定子磁鏈幅值和轉矩角變化量如式(16)和式(17)所示:

(16)
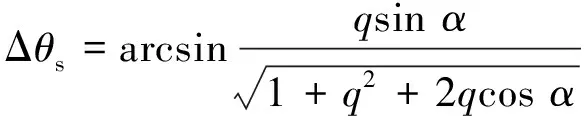
(17)
由于采樣周期較小,忽略轉子運動對轉矩角的影響,則下一時刻的轉矩角預測值如式(18)所示:
δ(k+1)≈δ(k)+Δθs=

(18)
式中:δ(k)為當前時刻的轉矩角。
由式(18)可知,確定下一時刻轉矩角需確定當前時刻轉矩角信息δ(k)。本文采用反解轉矩方程以獲得轉矩角δ(k),如式(19)所示:

(19)
將下一時刻定子磁鏈幅值和轉矩角預測值代入至轉矩方程,則可得下一時刻的電機轉矩預測值[24-25],如式(20)所示:

(20)
由此可得,基于定子磁鏈坐標系的SPMSM MPTC系統如圖6所示。
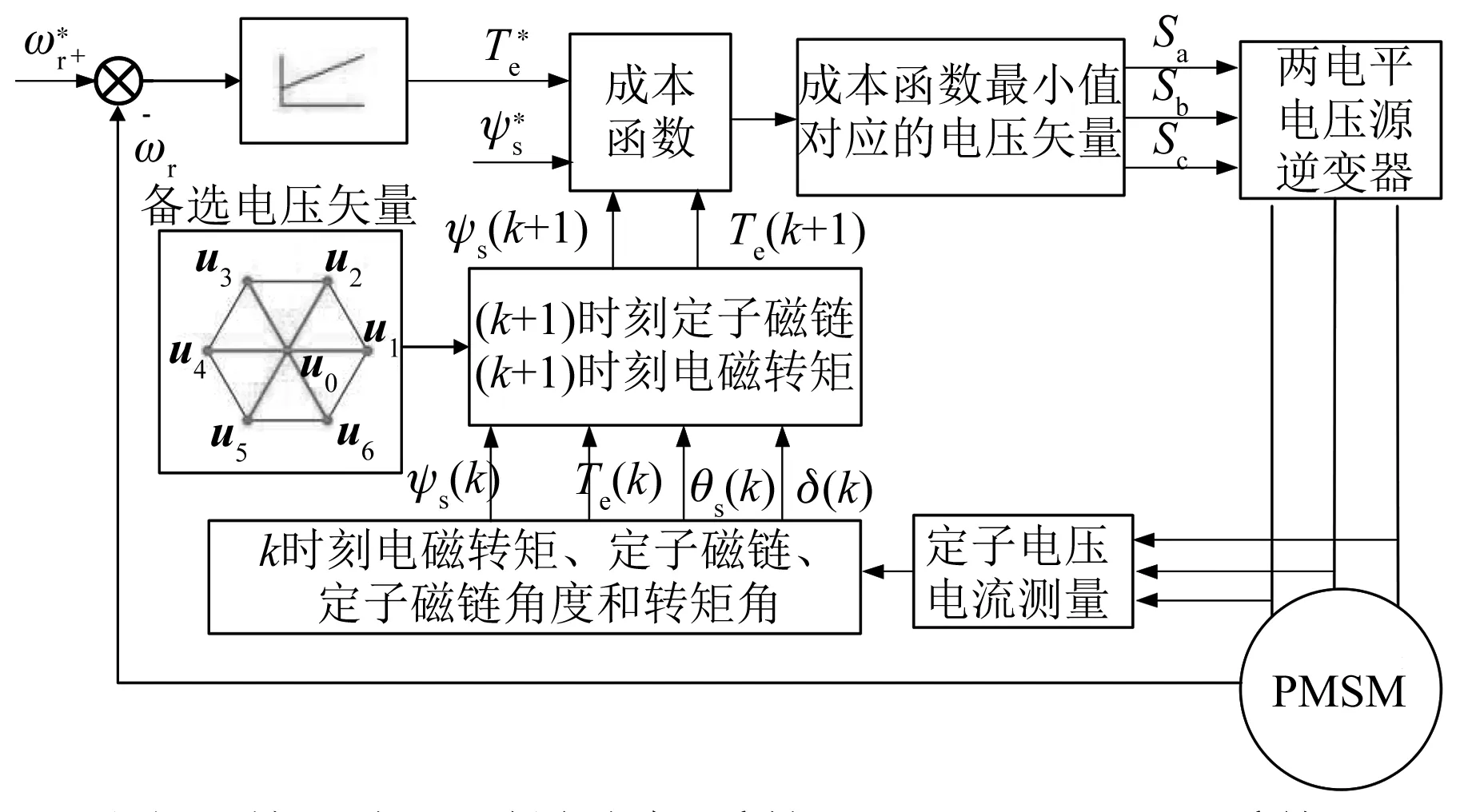
圖6 基于定子磁鏈坐標系的SPMSM MPTC系統
相同備選電壓集合、成本函數及仿真條件下,基于定子磁鏈坐標系的SPMSM MPTC系統仿真結果如圖7~圖9所示。
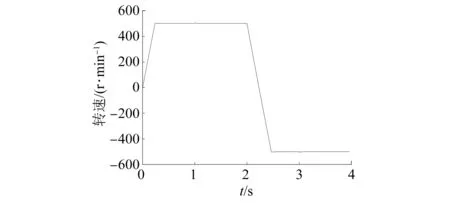
圖7 基于定子磁鏈坐標系的SPMSMMPTC電機轉速
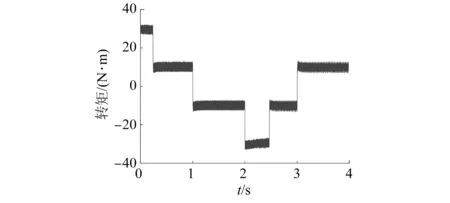
圖8 基于定子磁鏈坐標系的SPMSM MPTC電機轉矩
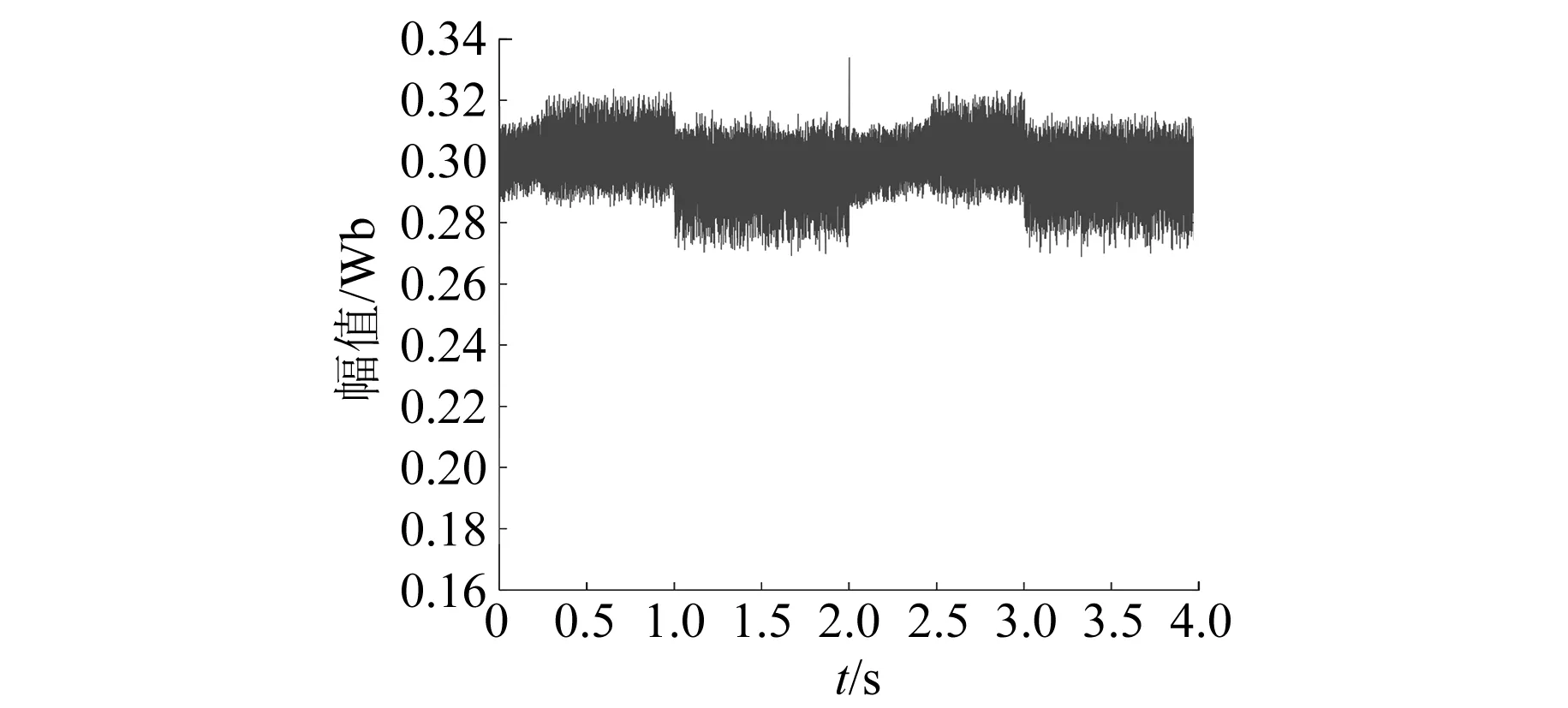
圖9 基于定子磁鏈坐標系的SPMSM MPTC定子磁鏈幅值
基于定子磁鏈坐標系的SPMSM MPTC系統控制性能如表3所示。

表3 基于定子磁鏈坐標系的電機系統控制性能
3 基于靜止坐標系的SPMSM MPTC
SPMSM定子電壓矢量和定子磁鏈矢量方程[26]如式(21)、式(22)所示:
(21)
ψs=Lsis+ψf
(22)
將式(21)代入至式(22)可得:
(23)
由于采樣頻率較高,同樣采用一階歐拉前向離散公式將式(23)離散化,可得下一時刻定子電流矢量預測模型如式(24)所示:
(24)
由上文可知,下一時刻的定子磁鏈矢量預測模型如式(25)所示:
ψs(k+1)=ψs(k)+Tsus(k)-TsRsis(k)
(25)
基于下一時刻定子電流矢量和定子磁鏈矢量預測模型,SPMSM下一時刻轉矩預測模型如式(26)所示:

(26)
由此可得,基于靜止坐標系的SPMSM MPTC系統如圖10所示。

圖10 基于靜止坐標系的SPMSM MPTC系統
相同備選電壓集合、成本函數及仿真條件下,基于靜止坐標系的SPMSM MPTC系統仿真結果如圖11~圖13所示。

圖11 基于靜止坐標系的SPMSM MPTC電機轉速
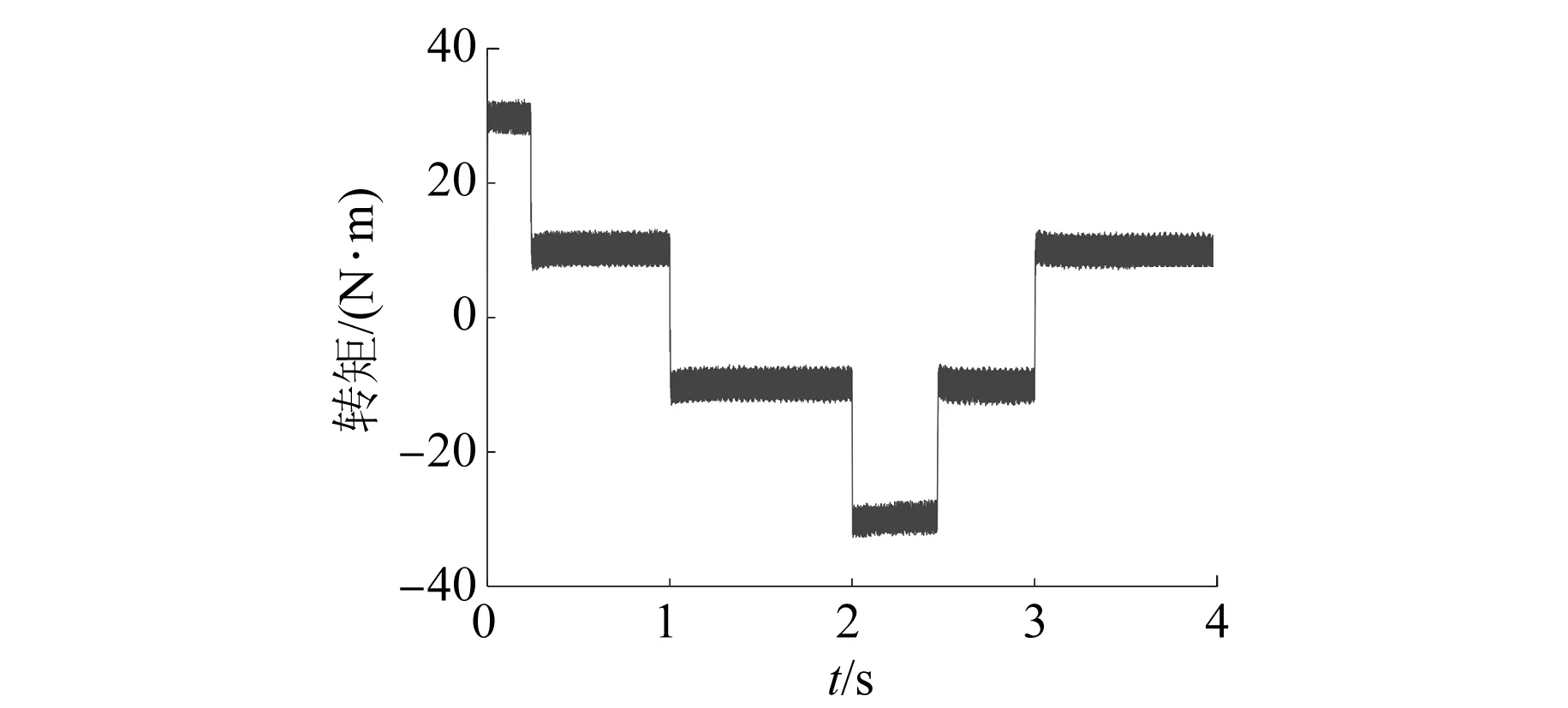
圖12 基于靜止坐標系的SPMSM MPTC電機轉矩
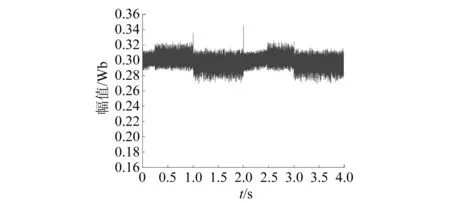
圖13 基于靜止坐標系的SPMSM MPTC定子磁鏈幅值
基于靜止坐標系的SPMSM MPTC系統控制性能如表4所示。

表4 基于靜止坐標系的電機系統控制性能
4 結 語
(1) 基于轉子磁鏈坐標系、基于定子磁鏈坐標系和基于靜止坐標系的SPMSM MPTC可行,電機系統可實現四象限運行。
(2) 不同磁鏈和轉矩預測模型對磁鏈和轉矩的計算有所差異,導致SPMSM MPTC系統控制性能不同。基于轉子磁鏈坐標系的SPMSM MPTC性能較優,但平均開關頻率較高。基于定子磁鏈坐標系和靜止坐標系的SPMSM MPTC性能基本相當,轉矩脈動較大,但平均開關頻率較低。
(3) 基于轉子磁鏈坐標系的SPMSM MPTC需要轉子實時位置和旋轉坐標變換以獲得電機定子d、q軸電流分量。基于定子磁鏈坐標系和基于靜止坐標系的SPMSM MPTC可不依賴轉子位置實現,從而減小對轉子實時位置信息的依賴。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
