無人機傾斜攝影技術在大比例尺地形圖測繪中的應用探討
2022-09-01 15:43:18雷宇宏
科技創新與應用 2022年24期
關鍵詞:生產
雷宇宏,俞 倩
(三和數碼測繪地理信息技術有限公司,甘肅 天水 741000)
隨著無人機技術的發展和航空攝影測量技術的出現,采用航空攝影進行影像數據獲取,利用影像進行空三加密,然后基于虛擬立體像對采集地形圖成為了大比例尺地形圖測繪的主要方法[1]。但是通過實際作業發現,采用垂直攝影,基于立體像對采集的地形圖,其精度很難滿足1∶500 地形圖規范要求,因此不能作為1∶500 地形圖生產的方案[2]。為了解決這一問題,筆者在分析了傾斜攝影測量技術后,提出利用傾斜攝影測量技術進行1∶500 地形圖生產的作業方案。并通過外業實地采集的特征檢測點對本文方案生產的地形圖精度進行了檢測,結果表明:按照本文方案生產的地形圖,其精度可以滿足1∶500 地形圖精度要求,可以作為1∶500 地形圖生產的方案進行推廣,希望可以解決大比例尺地形圖生產的痛點,為1∶500 地形圖生產帶來借鑒。
1 傾斜攝影技術概述
傾斜攝影是近幾年來發展起來的一項測繪新技術,其是指在飛行器上搭載多鏡頭航攝儀,從空中對地面進行全方位、多角度影像數據獲取的技術。首先利用無人機搭載多鏡頭非量測數碼相機進行影像數據采集,然后利用專業的數據解算軟件進行空三加密的解算和實景三維模型的生產,然后基于實景三維模型進行多類型測繪產品的制作。利用無人機傾斜攝影技術進行大比例尺地形圖生產的作業流程如圖1 所示。
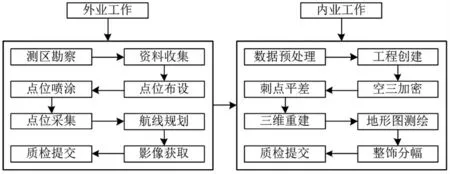
圖1 基于無人機傾斜攝影生產大比例尺地形圖流程圖
2 案例分析
本次案例來源于實際生產項目,為了減少外業工作量,縮短工作周期,在分析傾斜攝影技術后,提出采用傾斜攝影進行1∶500 地形圖的生產。工作主要分為外業和內業兩部分,具體的工作內容如下。
2.1 外業工作
外業工作主要包括測區勘察與已有資料收集、像控點噴涂與采集、航線規劃和航空攝影4 部分。
2.1.1 測區勘察與已有資料收集
本次任務位于甘肅省天水市城區,需要對城區某一區域進行1∶500 地形圖全要素測繪。測區位于繁華地段,車輛行人多,路況復雜,測區內最高建筑約為50 m,地勢較為平坦。測區內有D 級控制點1 個,2020年0.2 m 分辨率正射影像成果。
2.1.2 像控點噴涂與采集
首先將0.2 m 正射影像和范圍線導入到ArcGIS中,然后按照300 m 的間距,在正射影像上均勻布設像控點點位,在范圍線拐角處和邊緣需布設像控點,從而確保邊緣成果的精度。布設完成后,將其導出為工作底圖,用于外業進行像控點點位的快速查找。為了提高像控點內業轉刺的精度,本次像控點點位全部采用紅色油漆進行“L”形噴涂,噴涂的拐角要非常垂直,這樣有利于內業進行準確轉刺。利用GPS-RTK 進行像控點點位采集,首先對任務區內的D 級控制點進行采集,并和已有的點位進行對比,對儀器進行檢核,確保參數輸入誤差,采集點位成果準確可用。在采集的時候,采集“L”的內拐角,并對每個點位進行3 次有效采集,有效采集是要求彼此之間交叉均小于1 cm,最后取平均值作為最終的采集成果。在采集完像控點成果后,在測區精度薄弱區域,隨機均勻采集23 個平高特征檢測點,用于后期對地形圖成果精度進行檢測。
2.1.3 航線規劃
結合50 m 的高差,本次航線規劃,按照東西方向,航向、旁向重疊均為85%,地面采樣分辨率為3 cm,相對航高為120 m,共布設飛行架次21 個。本次測試選取其中1 個具有代表性的架次進行。具體的航線規劃參數如圖2 所示。

圖2 航線參數規劃
2.1.4 航空攝影
在無人機進行航空攝影作業前,先要進行航飛前各項指標檢查,主要查看飛機各部件是否固定牢靠,相機是否可以正常曝光,POS 是否可以正常記錄,內存卡讀寫是否正常,電池電量是否可以滿足航飛要求等。在確保符合航飛要求前提下,進行無人機升空采集影像數據。在采集影像的過程中,要時刻關注地面站上飛機的飛行狀況,確保飛行是可控的。如果發現無人機偏離航線,需采取必要措施,對無人機進行返航,確保不會發生安全事故。在無人機完成影像數據的采集后,按照規劃好的航線進行降落,并第一時間對內存卡中的影像和POS 數據進行導出并保存。
2.2 內業工作
內業工作主要是對外業提供的成果進行預處理,并選擇專業的建模軟件進行工程的創建和數據的導入完善,然后進行空三加密和實景三維模型的重建,最后基于實景模型進行地形圖的測繪。
2.2.1 數據預處理
數據預處理主要是對POS 數據進行解算,對影像質量進行提升。
(1)POS 數據解算。在傾斜攝影中,通常記錄的是下視鏡頭的POS,然后用下視鏡頭的POS 代替側視鏡頭的POS 進行數據解算,這樣由于側視鏡頭POS 精度不高,無法準確還原采集影像時的位置和姿態,容易導致解算失敗。通過對航攝儀中安置的相機進行分析,結合平臺安置參數,利用Matlab 軟件進行編程,然后以下視鏡頭POS 為基準,對4 個側視鏡頭POS 進行解算,使得影像和POS 可以一一對應。
(2)影像質量提升。5 個鏡頭獲取的影像名字是相同的,因此首先需要對影像進行重命名。利用拖把更名器,對5 個鏡頭影像進行重命名,使得影像名和POS 名可以對應上,且是唯一的,不存在重名的。通過人機交互的方式對影像進行查看,影像質量整體較差,對比度不明顯。為了后續成果的質量有保障,首先利用Photoshop 軟件對其中1 幅影像進行勻光勻色和調整亮度處理,然后利用軟件中的批處理功能,對所有影像按照同樣的處理步驟進行勻光勻色和亮度調整的處理。
2.2.2 工程創建
工程創建主要的目的就是建立新工程,然后把POS 數據、影像和相機參數進行導入。首先通過文件夾的形式,對5 個鏡頭影像進行加載,然后將POS 數據進行導入,將檢校的相機參數進行填寫完善。在實際作業中,由于傾斜鏡頭檢校成本高,因此多數情況下利用軟件自檢校完成,本次在作業時也利用自檢校方式對相機參數進行優化。
2.2.3 空三加密與刺點平差
傾斜攝影數據解算中,空三解算通過率是很低的,主要原因是相機參數不夠精確。為了解決這一問題,需要進行相機參數優化。首先選取連續的100 張影像,5個鏡頭共500 張影像,對這些影像進行空三加密解算,通過平差得到優化后的相機參數,然后將得到的參數導出,并引入到所有影像解算的工程中,這樣有利于提高空三的解算成功率。本次參與運算的影像共15 435張,解算后未入網影像13 張,解算成果未分層,未彎曲,空三成果質量較好。將采集的像控點導入空三中,并對所有的像控點進行轉刺。對于位于影像邊緣部分的點位,本次不進行轉刺,轉刺完成后進行平差調整。平差完成后,查看平差報告,本次所有像控點的平面中誤差為0.011 m,高程中誤差為0.013 m,加密點重投影中誤差為0.351 個像素,小于規范的2/3 個像素,平差精度符合要求,成果可用。
2.2.4 三維重建
結合集群電腦的配置,在建模時,采用規格格網平面劃分的方式對瓦片進行劃分,大小設置為100 m×100 m,這樣內存約為15 G,小于集群電腦最低配置32 G 的1/2,這樣可以確保在建模過程中,電腦內存不會溢出,保證建模順利完成。在輸出參數設置中,貼圖質量選擇100%,瓦片輸出格式選擇OSGB,輸出坐標系統選擇和像控點一致,其余參數默認,提交建模任務,開啟所有集群電腦的引擎,快速完成三維模型的重建。
2.2.5 地形圖測繪
本次地形圖采集選用北京清華山維的EPS 軟件,新建工程,選擇1∶500 地形圖數據庫。首先對OSGB 格式的模型和元數據xml 進行加載,然后生成索引文件DSM,并將其加載到軟件中,然后選擇不同的圖層命令,進行地形圖的采集。在采集等高線時,利用高程點和水面淹沒的方式,對等高線進行生成和采集。
3 精度統計與分析
將23 個特征檢測點導入EPS 軟件中,對地形圖成果精度進行檢測,檢測結果見表1。表1 中單位均為m,DX代表X方向較差,DY代表Y方向較差,DZ代表高程較差,DS代表點位平面較差。
按照同精度中誤差[3]計算公式,對23 個檢測點的平面位置中誤差進行計算,得到平面位置點位中誤差為±0.122 m,以算數平均值作為高程中誤差,得到高程位置點位中誤差為0.160 m,成果精度滿足1∶500 地形圖精度要求。
4 結束語
本文以實際生產項目為例,對傾斜攝影技術在大比例尺地形圖生產中的應用進行深入分析,并采用特征檢測點對生產的成果精度進行了檢測。檢測結果表明,采用本文方案生產的地形圖,精度可以滿足1∶500 地形圖精度需求,可以為大比例尺地形圖的生產帶來借鑒。
猜你喜歡
江蘇安全生產(2022年9期)2022-11-02 07:01:24
中國化肥信息(2022年7期)2022-08-31 01:28:54
山東冶金(2022年2期)2022-08-08 01:50:42
小學科學(學生版)(2020年10期)2020-10-28 07:52:12
中國化肥信息(2020年7期)2020-03-19 01:54:02
中國軍轉民(2017年6期)2018-01-31 02:22:28
消費導刊(2017年24期)2018-01-31 01:29:23
中國制筆(2017年2期)2017-07-18 10:53:09
現代企業(2015年4期)2015-02-28 18:48:06
汽車零部件(2014年11期)2014-09-18 11:57:16
