基于公交車載數據的站點停靠精度分析
2022-09-02 02:20:46沈向前余洋吳偉
城市勘測 2022年4期
沈向前,余洋,吳偉
(1.中國有色金屬長沙勘察設計研究院有限公司,湖南 長沙 410117; 2.武漢大學遙感信息工程學院,湖北 武漢 430072;3.湖南省礦山安全智能化監控技術與裝備工程技術研究中心,湖南 長沙 410117)
1 引 言
公交汽車是市民日常外出最常乘坐的交通工具之一,公共交通的快速發展有效緩解了道路擁堵的城市病,在方便市民出行的同時,也有助于減少碳排放[1]。但是在實際運營中,公交汽車行駛超速、不按線路行駛、進站不減速、不靠邊、停靠位置不準確等現象時有發生,甚至有到站不停、有客不載等行為。研究分析公交車到站停靠位置的精度有助于發現公交車停靠不準確發生概率高的站點和車輛,針對性的進行監督和整改,以提高公交車服務的質量,減少公交車事故的發生。
目前,大多數城市的公交車輛都配備有車載GPS和AFC數據,積累了海量的公交軌跡數據和刷卡數據[2,3]。Qin LJ[4]等人基于GPS數據和刷卡數據對公交車服務的可靠性進行了研究,Cortés[5]等人研究了基于GPS數據對商用公交汽車的速度分析,實現了對商業公交汽車速度的監控。Nguyen K等人[6]采用行程時間可靠性、準點性能和旅行時間等多項指標對洛杉磯地鐵GPS數據進行處理分析以及Web可視化。任慧君[7]等利用車載GPS軌跡數據,提取駕駛過程中超速、急加速、急減速、急轉彎等潛在的不安全駕駛行為,對公交車駕駛安全性分析。霍豪[8]等人根據公交運行數據和天氣數據建立了一種公交車站點停靠時間預測模型,提高公交行程時間預測的準確性。劉曉[9]等人采用出行時間鏈識別公交乘客的上、下車站點,通過公交大數據進行了通勤時空分析。楊世軍[10]等人根據人工調查數據,對城市公交車輛駐站時間進行了特征分析和預測。上述研究主要分為兩類:一是利用公交軌跡數據識別公交車的駕駛行為對公交車的運行狀態、行程時間等進行分析和預測,以提高公交車的服務質量;二是利用公交軌跡和刷卡數據預測乘客通勤時間、出行OD(origin destination,OD),對乘客的出行行為進行分析,通過大數據分析來合理調度公交車的運營時間與車次。
公交停靠站點的準確與否也是影響公交服務質量的因素,本文在前人對公交車大數據研究的基礎上,展開對公交車到站停靠位置的分析。原理上公交車到站停靠位置可以通過刷卡數據與GPS軌跡進行時間匹配來推算,但在公交實際運營中,時常會出現行駛期間刷卡,尤其在早晚高峰時間段出現的頻率最高,會增加公交到站停靠位置的估計誤差,從而影響分析結果。本文提出利用加速度和刷卡時間語義特征識別公交車輛的到站停靠點,來減少時間匹配方法的誤差。其次使用DBSCAN聚類算法對公交線路的到站停靠點進行聚類,降低GPS定位誤差對停靠點識別的影響,以獲取更加精確的公交到站停靠點和停靠區域。
2 數據來源
為了分析公交車在公交站點停靠的精準程度,首先需要根據公交車GPS和AFC刷卡數據計算公交車在各個站點的停車坐標,然后將計算出來的停車坐標與公交站點坐標進行匹配分析,以公交車在車站停車坐標點的空間分布情況來評價公交車在各個站點的停靠精度。
本研究使用的數據來自深圳大學空間信息智能感知與服務深圳市重點實驗室組織的“ISPRS Scientific Initiative——Open Data challenge”大賽項目。數據共有3個表,分別為:AFC刷卡數據、GPS軌跡數據和公交線路數據,上述數據的數據結構及關聯關系如圖1所示:

圖1 數據表結構及關聯關系
其中AFC刷卡數據、GPS軌跡數據中的日期跨度為7天,時間精確至秒。GPS軌跡數據的坐標為WGS84地心坐標系下的經緯度,精確至小數點后6位,運行方向為0或1,分別代表公交車上行和下行。公交線路數據中只有線路編號和公交車編號的對應關系,沒有公交站點坐標信息,本文通過將GPS軌跡數據與百度地圖疊加顯示的方式進行展示和相關的分析。
3 公交車停靠精度分析
3.1 到站停靠點識別
AFC刷卡數據有刷卡時間和公交車編號,可以在GPS軌跡數據中查詢對應公交車編號的定位數據,通過設定時間差半徑△T,可以計算落在刷卡時間TAFC緩沖區內,即滿足式(1)的GPS定位點數據,其中時間差最小的GPS定位點通常認定為公交車到站的停靠點[11,12]。
TAFCm-△T≤TGPSi≤TAFCm+△T
(1)
式(1)中TAFCm表示m次刷卡數據的時刻,TGPSi表示第i個GPS點的定位時刻,△T為時間緩存區半徑。
但是公交車日常運營中,經常會出現同一個公交站有多名乘客刷卡乘車的情況。此外,在早晚高峰時段公交車內乘客擁擠,部門乘客會選擇從后門上車,在公交車離站后一段時間才進行刷卡,因此部分刷卡數據的時間與公交到站的時間不能完全匹配。
通過觀察分析公交車進站前后的過程,可以發現公交車到站前后有3個步驟:減速進站、停靠上下客、加速出站。在此過程中,公交車輛一直保持低速行駛,且公交車輛行駛速度由大變小,又從小變大,即公交車輛行駛的加速度a由“負值”變為“正值”。由于同一公交線路的所有公交車輛都會在相同的公交站臺停靠,因此提取滿足式(2)和式(3)的GPS軌跡點,也可以被識別為公交車到站的停靠點。
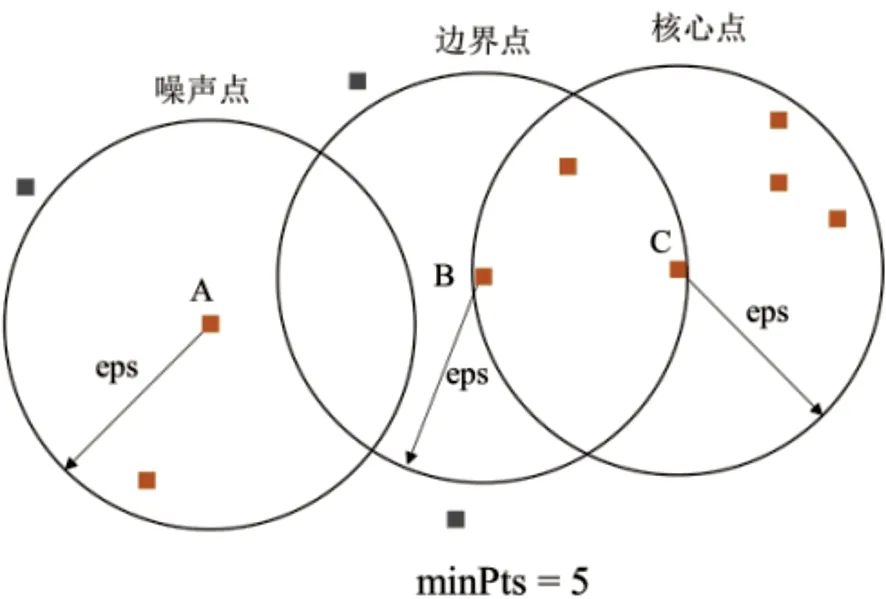
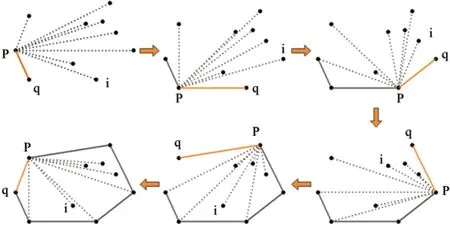
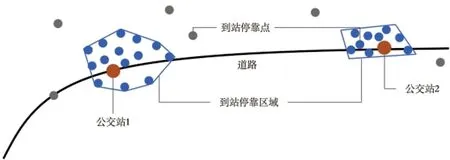
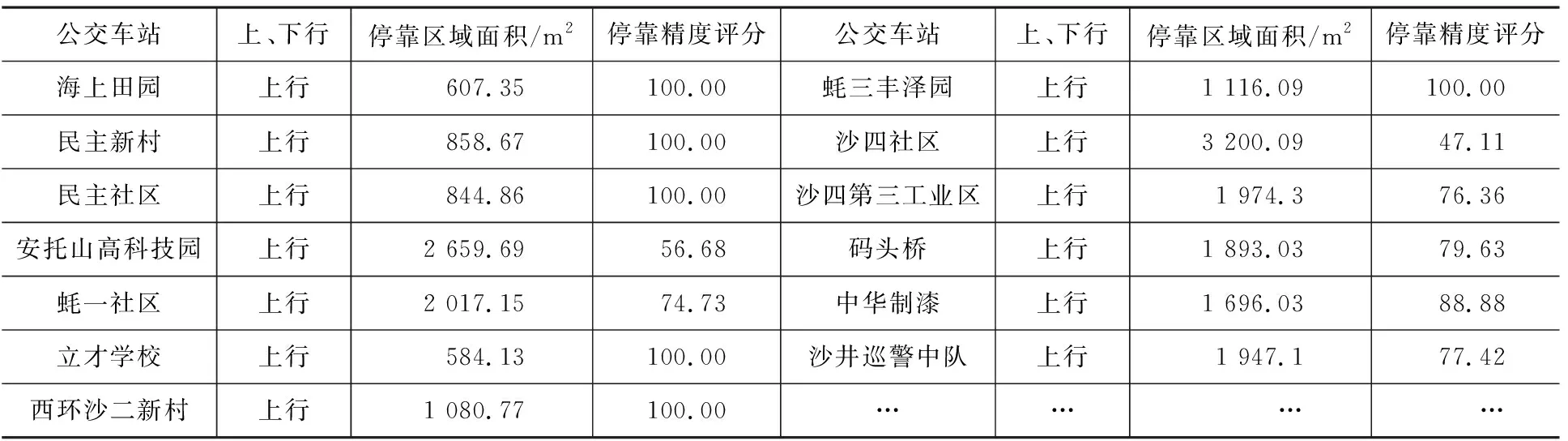
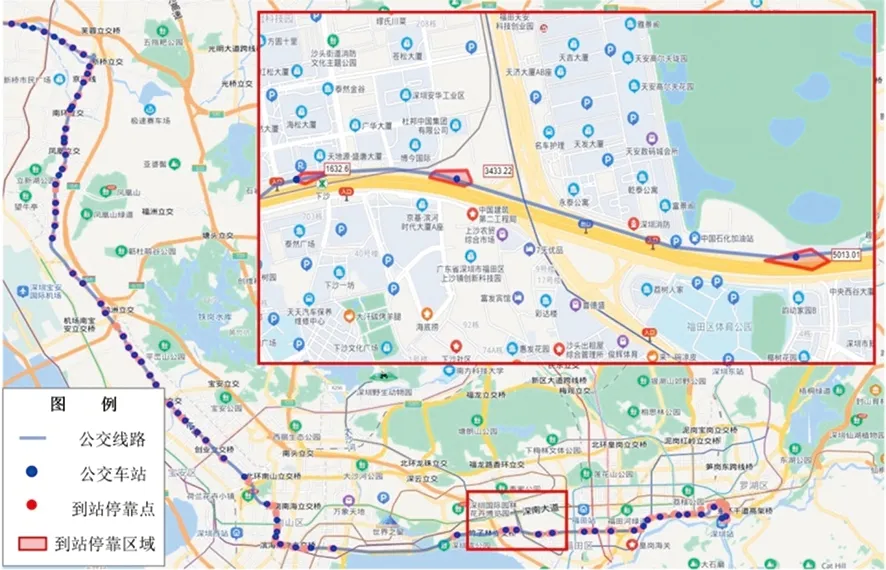
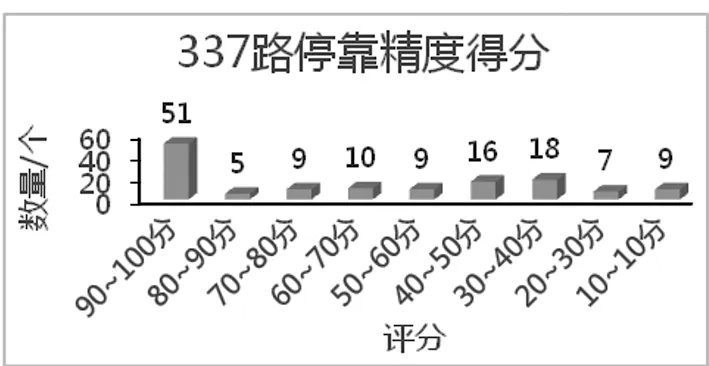
VGPSi (2) aGPSi<0∧aGPSi+1>0 (3) 式(2)中VGPSi表示公交車在第i個GPS點位置的速度,V0表示公交車的速度閾值。式(3)中aGPSi、aGPSi+1分別表示公交車在第i個GPS點位置和第i+1個GPS點位置的加速度。 如圖2所示,AFC刷卡數據在時間上呈現聚集性,同一公交車站可能會有多次刷卡記錄,在道路擁堵等情況下,公交車在公交站附近可能會有多次停靠、也會出現在公交站外停車的情況,其行駛加速度也會表現由“負值”變為“正值”的特征。為了提高公交車到站停靠點識別的準確率,本文同時使用公交車加速度和AFC刷卡時間兩種語義特征來識別公交車到站停靠點,GPS軌跡點i同時滿足式(1)、式(2)和式(3)時,將被標記為公交車到站的停靠點。 圖2 到站停靠點識別示例到站停靠區域識別 公交車在城市環境中運行時,受多路徑效應影響,其車載GPS定位有所下降[13],其定位精度在±15m左右,車載GPS系統和自動售票刷卡系統記錄的時間也存在基準差異,導致通過公交車加速度和AFC刷卡時間兩種語義特征識別的公交車到站停靠點,仍然有一定的噪聲。因此,對單輛公交車一次的停靠點進行精度評價意義不大。為了更加精準、科學的分析評價公交車到站停靠的精度,本文對公交線路多天到站停靠點進行密度聚類[14],并通過求取聚類各個簇的最小外包凸多邊形表示公交車到站停靠區域。 DBSCAN是一種有代表性、有效的基于密度的聚類算法,與其他基于密度的聚類方法相比,DBSCAN有以下優點[15]:①能夠對帶噪聲的數據進行聚類分析;②不需要對數據分布做預先的假設,即不需要預先設定分類(簇)的個數;③能夠發現不同形狀的聚類簇,如:線狀簇、類圓形簇、凹形簇等。DBSCAN計算時需要輸入3個參數:點數據(PtList)、掃描半徑(eps)和最小包含點數(minPts)。如果一個點的掃描半徑內包含(相互之間距離小于eps)點個數超過minPts,則此點為核心點,落在此掃描半徑的點為邊界點;任意兩個距離小于eps的核心點將放在同一簇中;同樣,任何與核心點距離小于eps的邊界點也要放到與核心點相同的簇中;如果一個點既不是核心點也不是邊界點,則是噪聲點。DBSCAN聚類的效果如圖3所示。 圖3 DBSCAN核心點、邊界的和噪聲點 在DBSCAN聚類后通過Jarvis March算法求取各個簇的最小凸包,以最小外包凸多邊形表示公交車到站停靠區域。Jarvis March算法的原理是從最左邊的點(X坐標值最小的點)開始,并沿逆時針方向不斷包裹點,具體算法如下:(1)初始化p為最左側的點。(2)循環執行下面的操作,直到再次到達起點。①將當前點p添加至結果中;②搜索點q,使得p,q對于任意點i的方向(p,q,i)都是逆時針方向,令p=q。Jarvis March算法的執行過程如圖4所示。 圖4 Jarvis March算法執行過程停靠精度評價 本文通過DBSCAN對同一公交線路多天到站停靠點進行聚類分析,刪除噪聲點后,通過計算凸包的算法精確識別公交車到站停靠區域,識別的到站停靠區域與對應公交站相匹配后,可以直觀的對比公交車在不同公交站到站停靠的精準情況,識別效果如圖5所示。 圖5 到站停靠區域識別示意圖 為了對公交車到站停靠精度進行量化評價,首先將公交到站停靠區域疊加至百度地圖,與對應公交線路的站點進行匹配,然后計算公交車站標準停車位面積與對應的公交到站停靠區域面積的比值,以其比值評價公交車在此站停靠的精度,計算方法見式(4)。通過現場調查,一般公交車站標準停車位長約 15 m、寬約 3.5 m,同時考慮到公交車車載GPS的定位精度不高(市區定位精度在 15 m左右),本文計算標準停車位面積時按照長 45 m、寬 33.5 m計算,面積為 1 507.5 m2。 (4) 式(4)中areastation表示公交車站標準停車位面積,areastop表示公交到站停靠區域面積,score表示公交車在此公交站點的停靠精度評分。 以深圳市337路公交7天共92萬條GPS數據和13萬條AFC刷卡數據為例,根據公交車停靠精度分析模型計算337路公交7天上行、下行公交車到站停靠點和停靠區域。由于公交GPS軌跡數據的坐標系和百度地圖的坐標系不一致,首先需要將公交GPS軌跡數據從WGS84坐標系轉換至bd09ll坐標系。然后根據轉換后的GPS點和AFC刷卡數據依次求取每條公交線路的到站停靠點和到站停靠區域。圖6展示了識別出來的337路公交車下行到站停靠點和停靠區域。通過與百度地圖的公交線路疊加顯示,可以看到識別出來的公交停靠區域和公交車站的位置吻合程度很高,而且不同站點的停靠區域面積差異也比較大。在到站停靠點、停靠區域識別完成后,使用緩沖區分析的方法將公交車站和對應的停靠區域進行匹配,如果公交車站的緩沖區內有多個停靠區域時,保留停靠點個數最多的停靠區域。最后,依次計算公交車在每個站點的停靠位置精度。表1列出了337路公交車7天上行、下行的到站停靠位置精度的部分統計結果。 表1 337路公交車7天上行、下行的到站停靠位置精度的部分統計 圖6 337路公交車下行到站停靠點、停靠區域識別 337路上行經停公交站74站、下行經停公交站79站,合計153站,識別并匹配成功的上行到站停靠區域72個、下行到站停靠區域62個,合計134個,識別成功率達87.58%,對337路公交車識別出來的134個到站停靠區域進行精度評分,停靠精度得分如圖7所示。 圖7 337路公交車到站停靠精度得分分布圖 通過分析337路的停靠精度評分情況,可以發現停靠規范(100分)的共有45站、占比33.58%,停靠基本規范(60分以上)的共有75站、占比55.97%,停靠不規范的共有59站、占比44.03%。評價數據表明公交車到站停靠不規范的現象發生的頻率仍然很高,公交運營公司可以對停靠精度評分靠后的公交站點進行現場檢測,分析公交車停靠不準的具體原因,由于公交車司機駕駛習慣不好造成停靠不準的應該進行監督和處罰,由于站點設置不合理造成停靠不準的應該進行改造,以提高公交車服務的質量。 采用公交GPS和AFC刷卡數據能獲取公交車到站停靠的位置坐標,為分析評價公交車到站停靠位置精度提供精準數據。基于加速度特征篩選GPS軌跡點能明顯提高DBSCAN聚類的速度,同時使用加速度和刷卡時間雙重語義特征的公交車到站停靠點提取算法精度更高,可準確篩選出來公交車到站停靠點,識別成功率超過85%。通過對公交車停靠精度進行評價能夠發生不規范停靠現象多發的公交站點,可根據評價結果對停靠精度較差的站點進行針對性的現場檢測,為公交車進站規范評價和檢查整改提供了新思路。 由于本文使用的公交GPS和AFC數據是歷史存檔數據,時效性不夠強,因此無法反映當前公交車到站停靠的規范程度,有條件的可以結合當前的數據進行實驗,并可對比分析不同時段、不同地域的公交車到站停靠精度情況。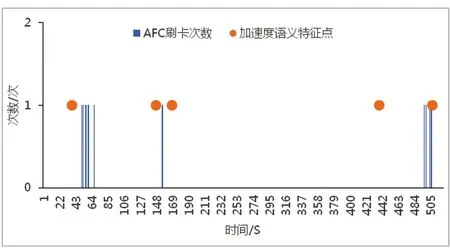
4 案例分析
5 結 語
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06