基于圖像軌跡代數運算的車輛監測技術與判定
2022-09-03 10:30:08任冠華
汽車與新動力 2022年4期
任冠華
(江蘇聯合職業技術學院宜興分院,江蘇 宜興 214206)
0 前言
隨著汽車保有量的增加,對我國的交通監管提出了更高的要求,也促進了我國現代城市交通管理水平的提升。道路車輛智能監測記錄系統能夠對肇事汽車、違章汽車、黑名單汽車等進行快速識別和數據采集,為提高智慧交通服務水平,保障城市綜合交通網絡順暢運行,為交通違法、交通事故逃逸、機動汽車盜搶等案件的及時偵破提供了重要的信息和證據。
1 道路汽車監測系統類型
1.1 雷達監測系統
雷達監測系統將雷達波發射到行駛的汽車上,根據反射信號進行技術處理,得到目標車輛的速度參數。在道路路口處安裝雷達,可以運用雷達的發射時間間距和測速波長,推測出車輛某一時間段的行駛速度,判斷車輛是否存在超速行為,達到對車輛監測的目的。雷達監測系統是一種被普遍使用且成本較低的速度監測系統,安裝在路口或者有需要的地方,能實現對車輛的監測和分析。但在有信號干擾的情況下,雷達監測系統不具備良好的成像條件,不能及時和準確地留取車輛詳細信息,無法發揮監測功能,需要有與其匹配的儀器如激光測速儀等,才能使雷達監測系統保持良好的監測功能。激光測速儀的有效測速距離比雷達測速儀遠,測速精度更高,取證能力更強,耗電量更低,因而在全世界范圍內得到了廣泛認可和推廣。
1.2 衛星監測系統
衛星監測系統能夠實現24 h全天候監測,實時收發照片,是目前最先進的智能交通監測技術之一。我國的北斗衛星系統已初具規模,能夠在我國的領空形成密布而有序的監測網絡,全方位提升國家安全能力。衛星監測系統是智能交通監測的重要手段之一,但衛星檢測系統的應用成本較高,能源消耗較大。
1.3 紅外線監測系統
在智能交通中,紅外線監測系統類似于雷達監測系統,通過各道路路口安裝的紅外線儀器,對車輛的行進過程進行監測。紅外線監測系統是檢測紅外線被車輛遮擋的時間來判斷目標車輛的速度,這對儀器的使用和制造提出了較高要求。紅外線監測系統可在夜間進行監測和探查,且不受外在因素影響。由于紅外線監測系統極易損壞,所以需要及時修理和更換,避免對儀器設備的正常使用造成不便。
2 圖像軌跡代數運算
在圖像處理技術中,只要滿足兩幀圖像的矩陣大小和維數相同,就可對圖像對應的像元進行加、減、乘、除等代數運算。基于圖像的接觸網異物檢測主要是檢測出異物的大小和形狀,并在檢測過程中將采集圖像與模板圖像進行比對,找尋兩幀圖像的差異性。采用代數運算法對圖像進行減法運算,可以判別出兩張圖像的差異性。
若經過運算處理后的兩幀圖像存在差異性,并不能確定接觸網間存在異物,還應對存在差異的圖像進行處理。采用上述方法,對差異圖像進行直方圖均衡化運算及濾波、閥值分割、邊緣檢測等處理,才能得到真正的異物圖像。
3 汽車軌跡級聯預測道路狀況
汽車軌跡級聯預測方法是利用汽車攝像頭采集到的道路圖像信息,通過軟件分析車輛當前所處位置并提供相應的處理方法。路徑識別處理方式包括常規道路識別處理、交通燈識別處理、停車標志識別處理和障礙物識別處理等。其中,常規道路識別處理又包括單車道、雙車道、十字路口及有行駛方向標識的路口等。道路交通流運行方向控制采用“比例-積分-微分”(PID)控制算法。圖像采集模塊是計算機硬件部分最重要的組成部分,系統所需的大多數信息均來自視覺信號如道路標識、交通圖案、交通信號等。計算機軟件部分則主要包括道路識別與方向控制模塊、脈沖寬度調制(PWM)輸出模塊及串口通信模塊。
3.1 常規道路識別處理
將常規道路圖像信息像素調整成為高度160像素、寬度120像素,由于事先已對采集到的樣本圖像進行了分析,因此不必再對整幅圖像進行處理。道路圖像的有效部分的圖像區域為36行至50行,以及最后20行的區域,可以認定該區域是交通燈箭頭所在的區域。由事先采集的樣本圖像可知,當從道路圖像的中心位置分別向左右遍歷圖像所有像素值時,會有明顯的黑白分界線,像素值從255突變為成0。這被認定為圖像的邊界值,可利用此特征尋找道路的邊線。
若圖像的邊界值一直保持遞增或遞減的變化趨勢,說明此時汽車處于直道上,圖像的中心像素值等于兩邊界像素值之和的平均值;若圖像邊界像素值突然從連續增加變為連續減小或從連續減小變為連續增加時,說明汽車即將到達十字路口,在圖像上邊界像素值發生相反變化的第1個像素點即為折點,且圖像在折點后的其他行的中心像素值等于上一行的中心像素值。此外,當圖像中某一行找到的邊界像素值突然距離圖像的中心像素值很近,并且在該行后幾行的邊界像素值又回歸到30左右的正常水平,說明汽車已到達道路地面上有行駛方向標識的路口,需要通過判斷指示箭頭的朝向來確定箭頭所在行的中心像素值。若箭頭朝向為向左,則程序設定這幾行的中心像素值會逐漸減小,反之亦然。
在討論圖像某行中心值時,應首先判別汽車所處的道路是直行道還是彎道。彎道圖像中每一行的邊界像素值變化都較大,而直行道圖像中每一行的邊界只相差1個像素值。彎道圖像的中心像素值由上一行的中心像素值和該行及邊界的趨勢決定,直行道圖像則需要根據找到的邊界像素值預估出尚未找到邊界的那些行的邊界像素值,然后使每一行的中心像素值等于左右邊界像素值之和的平均值。
當無法找到左右邊界時,應采用手動調整,使每一行的中心像素值等于上一行的中心像素值。在處理每幅圖像時,首先要找第1行的邊界,并將其作為標定行。因此,針對左右邊界都無法找到的圖像,其每一行的中心像素值都是相同的,且都等于第1行的中心像素值。
3.2 交通燈識別處理
在設計交通燈識別算法時,采用霍夫圓檢測方法來檢測交通燈。在前期試驗階段,使用微軟公司開發的Visual Studio 2010軟件結合OpenCV軟件模擬真實道路交通燈的仿真檢測,如圖1 所示。由圖1可見,3個交通燈圖像都能被找到,檢測效果較好。由于這是在靜態圖像上進行處理,因此圖像效果較好,并未受到太多干擾。但將該段代碼移植到指令地址寄存器(IAR)的開發環境下進行測試時,效果并不理想,其邊緣檢測Canny算子的閾值、圓半徑的設置、類間距離及其他霍夫變換的參數均難以調整到理想的狀態。因此,可根據實際情況,將霍夫圓檢測方法轉化為識別算法。
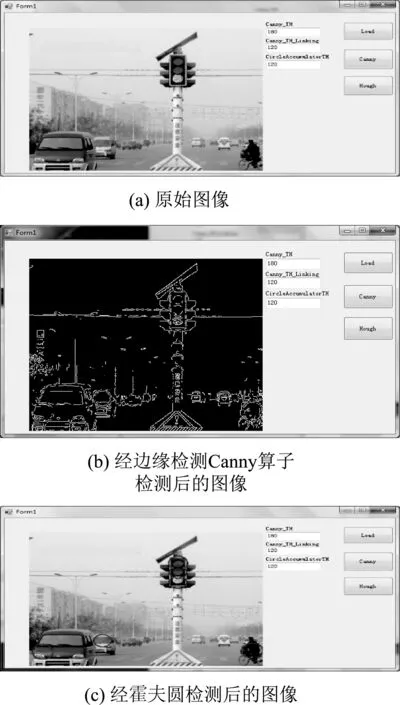
圖1 交通燈的仿真檢測
將指示燈設置為左、中、右3個方向,本文重點介紹左轉向指示燈的識別,其他2種情況可依此類推。交通燈檢測流程如圖2所示。
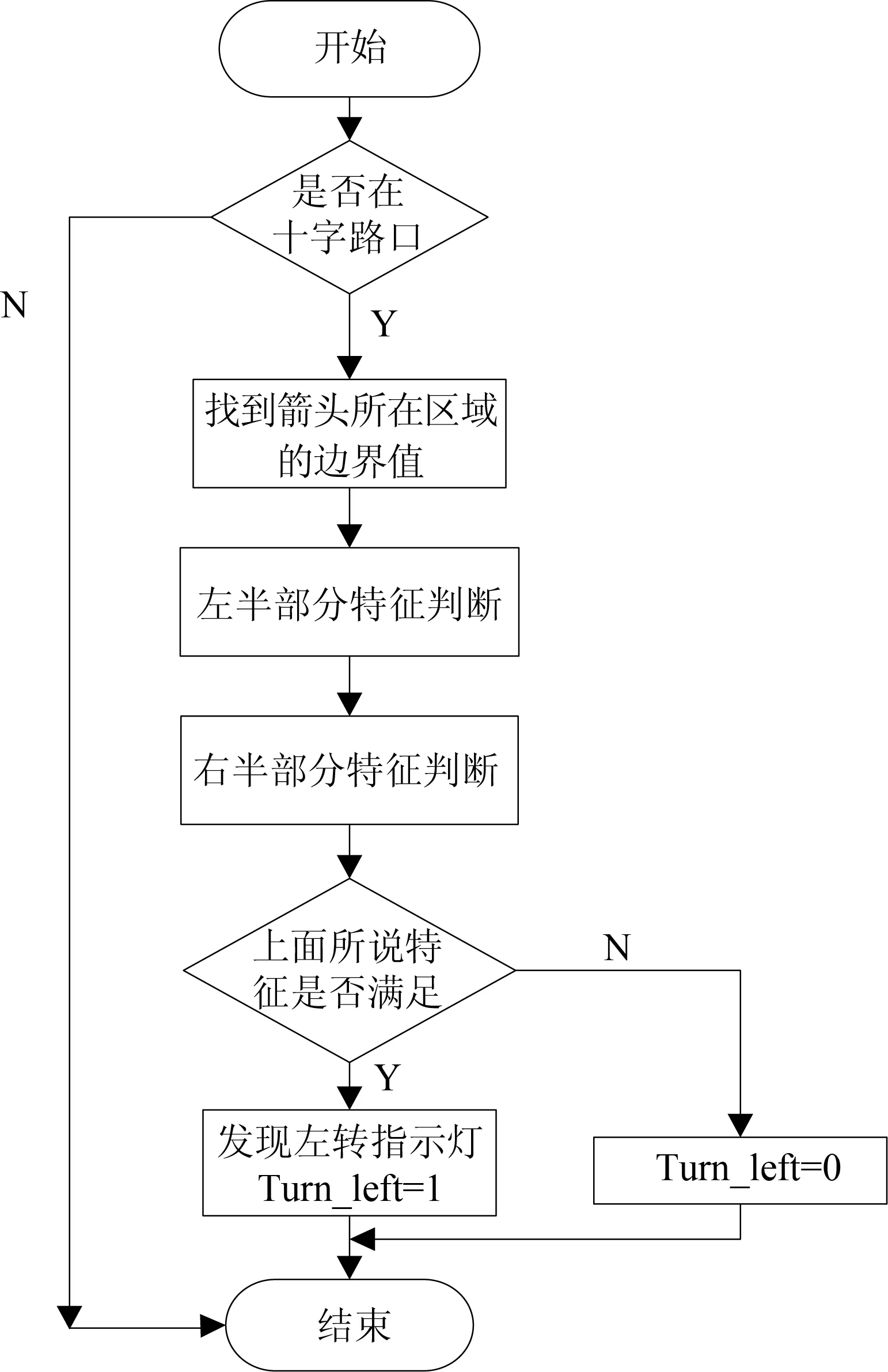
圖2 交通燈檢測流程
當指示燈亮起時,經過圖像二值化處理后,圖像中指示燈所在范圍呈現為白色,其背景為黑色。在二維圖像中左轉向箭頭具有以下特征:① 箭頭的左半部分呈階梯狀,箭頭最左端會有尖點;② 箭頭的右半部分呈矩形狀,在尖點所在行可找到箭頭的右邊界,將該右邊界的上下行進行對比,觀察邊界像素值的變化是否趨弱或者呈近似于直線狀。當在某段區域中檢測到符合上述特征的圖像時,就可判定為找到了左轉向箭頭。
3.3 障礙物識別處理
在障礙物的識別檢測過程中,障礙物采用1個長15 cm、寬8 cm的矩形物體。該矩形物體表面用黑色膠帶裹住,放至跑道偏左的位置。對于障礙物的識別,在算法上主要以圖像邊界像素值的連續性和完整性作為判別方式。
障礙物識別流程如圖3所示。若圖像中一邊的邊界像素值和上下兩行的邊界像素值相差為20時,可初步判斷發生了突變,并判定為障礙物。為避免障礙物與路口出現的轉向指示標志混淆,需要系統程序對障礙物圖像特征進行判斷。將找到的邊界像素值發生突變的點作為起點,系統程序分別向左、向右、向上統計黑白點出現的數目,如果向左和向上統計到的黑點數目都大于7個像素值,向右統計到的白點數目大于20個像素值,則可初步判斷為找到障礙物,然后再根據圖像特征繼續進行判斷。從突變點開始,判斷此后的連續若干行是否與每行僅相差1個像素值或者與邊界像素值相等。如果符合上述結論,則可判斷為已找到了障礙物。為使擬合出的中心線較為平滑,系統程序需要重新計算圖像每一行的中心像素值。
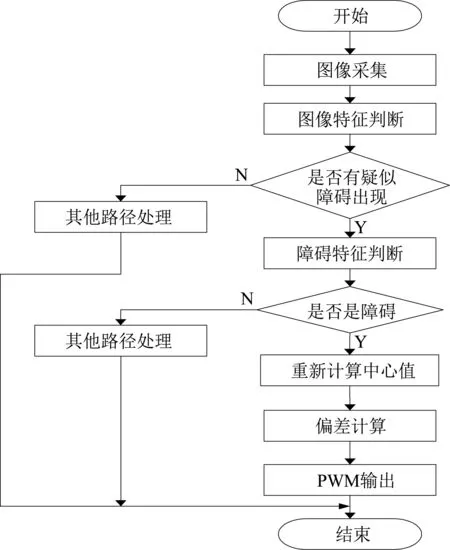
圖3 障礙物識別流程
4 結語
基于視頻的汽車監測與追蹤系統其應用環境是動態且復雜的,待監測目標種類多樣,環境中的建筑物、廣告牌、標識、樹木等都會使背景圖像更為復雜,而天氣、光線突變等因素也會對目標監測造成一定影響,因此對目標監測與追蹤算法提出了更高的要求。
本文構建了適用于真實交通復雜環境的視頻汽車監測與追蹤系統,測試驗證了多個場景下的目標監測與追蹤效果,并提供了相關的試驗數據,具有較強的實用性。對圖像軌跡進行代數運算,有助于增強圖像的清晰度,方便車輛行駛軌跡的監測與判定,可有效提升城市交通管理體系的智能化水平。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
