一種涵道螺旋槳槳葉高效設(shè)計(jì)方法
2022-09-05 12:25:18郭佳豪周洲李旭
航空學(xué)報(bào) 2022年7期
關(guān)鍵詞:方法設(shè)計(jì)
郭佳豪,周洲,李旭
西北工業(yè)大學(xué) 航空學(xué)院,西安 710072
涵道螺旋槳,即螺旋槳外部包圍涵道的一種動(dòng)力形式,被廣泛應(yīng)用于航空和航海領(lǐng)域,為飛行器、艦船、潛艇等提供動(dòng)力。相比孤立螺旋槳,涵道螺旋槳具有更高的安全性以及氣動(dòng)效率,因此研究高效的涵道螺旋槳設(shè)計(jì)方法具有較高的工程應(yīng)用價(jià)值。
涵道螺旋槳設(shè)計(jì)方法一般基于葉素動(dòng)量理論、升力線及面元法等快速方法,常用于涵道螺旋槳的初始設(shè)計(jì)。國(guó)外方面,Coney采用環(huán)渦與對(duì)稱(chēng)渦模型等效涵道,并基于升力線模型,提出一種涵道螺旋槳設(shè)計(jì)方法。Stubblefield應(yīng)用Kerwin最優(yōu)環(huán)量求解方法螺對(duì)涵道旋槳進(jìn)行了詳細(xì)的設(shè)計(jì)。此外,Epps和Kimball對(duì)螺旋槳升力線設(shè)計(jì)方法進(jìn)行了研究,并提出一種新的螺旋槳尾渦模型,與經(jīng)典尾渦模型的對(duì)比表明其具有較好的精度,并且魯棒性更高。基于以上研究,Epps等開(kāi)發(fā)了OpenProp螺旋槳設(shè)計(jì)軟件,并將涵道螺旋槳設(shè)計(jì)方法集成其中。
國(guó)內(nèi)方面,劉沛清推導(dǎo)了涵道螺旋槳葉素動(dòng)量理論。高永衛(wèi)等提出一種涵道螺旋槳工程設(shè)計(jì)方法,并根據(jù)軸流風(fēng)機(jī)葉素理論進(jìn)行槳葉設(shè)計(jì)。宋長(zhǎng)紅等建立了基于動(dòng)量源方法的涵道尾槳數(shù)值模擬方法,通過(guò)對(duì)比試驗(yàn)結(jié)果驗(yàn)證了方法的可行性。葉坤等通過(guò)動(dòng)量源方法簡(jiǎn)化槳葉,分別采用響應(yīng)面模型和神經(jīng)網(wǎng)絡(luò)模型,對(duì)NASA涵道進(jìn)行優(yōu)化設(shè)計(jì)。姬樂(lè)強(qiáng)等采用動(dòng)量源方法,研究了唇口半徑、涵道擴(kuò)張角、槳尖間隙及槳葉相對(duì)位置等涵道參數(shù)對(duì)整體氣動(dòng)力的影響,并對(duì)涵道外形進(jìn)行了優(yōu)化設(shè)計(jì)。此外,杜思亮等對(duì)一種開(kāi)口壁式涵道螺旋槳進(jìn)行了研究,并提出一種嵌入式涵道螺旋槳,研究表明懸停及小爬升狀態(tài)下相比于同等尺寸的涵道螺旋槳,其拉力及功率載荷更大。
隨著基于Navier-Stokes(N-S)方程的數(shù)值模擬方法的不斷發(fā)展,多重參考系法(Multiple Reference Frame,MRF)、基于滑移網(wǎng)格及嵌套網(wǎng)格的非定常數(shù)值模擬方法等更高精度的CFD(Computational Fluid Dynamics)求解方法被廣泛應(yīng)用于涵道螺旋槳性能計(jì)算中。但由于CFD計(jì)算耗時(shí)久,尤其是非定常計(jì)算。若應(yīng)用CFD計(jì)算進(jìn)行性能求解,進(jìn)行涵道螺旋槳的優(yōu)化設(shè)計(jì),雖然設(shè)計(jì)精度高,但設(shè)計(jì)效率低。而對(duì)于快速設(shè)計(jì)方法,由于設(shè)計(jì)方法本身存在一定簡(jiǎn)化,且需確定葉素的氣動(dòng)力信息,故設(shè)計(jì)性能同真實(shí)性能存在一定偏差。
因此,為提高設(shè)計(jì)的精度并保留設(shè)計(jì)的快速性,本文提出一種耦合CFD修正的涵道螺旋槳槳葉設(shè)計(jì)方法,首先采用快速設(shè)計(jì)方法進(jìn)行設(shè)計(jì),再通過(guò)CFD計(jì)算對(duì)設(shè)計(jì)進(jìn)行修正,兩者迭代,從而在進(jìn)行少量CFD計(jì)算后,得到滿(mǎn)足設(shè)計(jì)要求的結(jié)果。
1 涵道螺旋槳快速設(shè)計(jì)方法
1.1 最小能量損失
涵道螺旋槳葉素受力分析如圖1所示。其中:為來(lái)流速度;為轉(zhuǎn)速;為葉素實(shí)際迎角;為干涉角;為幾何入流角;為實(shí)際入流角;為阻升角;為合速度;為軸向誘導(dǎo)速度;為切向誘導(dǎo)速度;′為幾何誘導(dǎo)速度;為升力;為阻力;為切向力;為拉力。

圖1 葉素受力分析Fig.1 Force analysis of blade element
涵道螺旋槳槳葉設(shè)計(jì)基于最小能量損失原則。若徑向位置處槳葉葉素產(chǎn)生增量擾動(dòng)Δ,使螺旋槳拉力和扭矩分別發(fā)生Δ和Δ增量變化,則螺旋槳有用功與吸收能量對(duì)應(yīng)變化的比值為
(1)
忽略阻力影響時(shí),拉力、扭矩變化為
Δ=Δ(-)d
(2)
Δ=Δ(+)d
(3)
式中:為空氣密度。
根據(jù)圖1幾何關(guān)系式可得

(4)
聯(lián)立式(1)~式(4),可得
(5)
要使螺旋槳效率最高,則需在值大處增加環(huán)量,值小處減小環(huán)量。故最小能量損失要求沿槳葉分布為常數(shù)。又由式(5)可知,此時(shí)′沿槳葉的分布亦為定值。因此涵道螺旋槳槳葉的設(shè)計(jì)便是求解滿(mǎn)足設(shè)計(jì)要求的′,進(jìn)而確定各葉素的狀態(tài)。
1.2 涵道螺旋槳葉素動(dòng)量理論
對(duì)于涵道螺旋槳,槳葉提供一部分拉力外,涵道壁面也提供一部分拉力。假設(shè)槳葉拉力占比為,表示螺旋槳槳葉拉力,則
(6)
設(shè)涵道螺旋槳噴流的軸向誘導(dǎo)速度為,槳葉處的誘導(dǎo)速度為、,由動(dòng)量定理及動(dòng)量矩定理可知
d=2π(+)d
(7)
d=4π(+)d
(8)
d=2π(+)d
(9)
而根據(jù)動(dòng)量理論可知槳葉的拉力:

=2π(+2)d
(10)
式中:為槳盤(pán)面積;Δ為槳盤(pán)前后壓差。由式(9)、式(10)求得軸向誘導(dǎo)速度間的關(guān)系:
=2[+(-1)]
(11)
對(duì)于涵道螺旋槳,根據(jù)圖1所示葉素幾何關(guān)系并結(jié)合式(8)、式(9)可知:

(12)
故槳葉處軸向誘導(dǎo)速度和切向誘導(dǎo)速度的關(guān)系為
=[+(-1)]tan(+)
(13)

(14)
式中:和分別為升力系數(shù)和阻力系數(shù)。
又由式(4)可知:
′=tan+
(15)
聯(lián)立式(13)及式(15),推導(dǎo)可得槳葉誘導(dǎo)速度同′的關(guān)系:

(16)

(17)
1.3 快速設(shè)計(jì)方法
給定設(shè)計(jì)高度、來(lái)流速度及設(shè)計(jì)拉力,并確定涵道外形,在此基礎(chǔ)上進(jìn)行涵道螺旋槳槳葉設(shè)計(jì)。
槳葉拉力占比與涵道外形相關(guān),涵道外形確定則設(shè)計(jì)狀態(tài)下的確定,同時(shí)螺旋槳半徑確定。再選定槳葉翼型,確定設(shè)計(jì)狀態(tài)下的葉素迎角、升力系數(shù)及阻力系數(shù),通過(guò)設(shè)計(jì)得到各葉素的弦長(zhǎng)及扭轉(zhuǎn)角,從而得到涵道螺旋槳的槳葉外形。設(shè)計(jì)過(guò)程為
1) 確定槳葉數(shù)及轉(zhuǎn)速,并將槳葉劃分為個(gè)截面。
2) 根據(jù)設(shè)計(jì)拉力及設(shè)計(jì)狀態(tài)求解′,確定處葉素的弦長(zhǎng)及扭轉(zhuǎn)角。
給定初始′,得到入流角:

(18)
根據(jù)式(16)、式(17),可確定誘導(dǎo)速度,進(jìn)而得到合速度及環(huán)量:

(19)
(20)
葉素升力與當(dāng)?shù)丨h(huán)量關(guān)系為
d=d
(21)
而升力又可表示為
(22)
聯(lián)立式(21)~式(22)可得
(23)
故確定合速度及環(huán)量后,通過(guò)式(23)可求得葉素弦長(zhǎng)。
對(duì)于寬度為d的葉素,其產(chǎn)生的拉力d、扭矩d及總拉力d為

(24)

(25)

(26)
則總拉力為

(27)
式中:和分別為槳葉的最大和最小半徑。
采用Newton迭代求解上式,可得到滿(mǎn)足設(shè)計(jì)拉力要求的′,從而確定各個(gè)截面的受力幾何關(guān)系。最終得到該截面的設(shè)計(jì)弦長(zhǎng),及對(duì)應(yīng)的扭轉(zhuǎn)角:
=+
(28)
3) 重復(fù)求解,得到所有設(shè)計(jì)截面的弦長(zhǎng)及扭轉(zhuǎn)角。
2 涵道螺旋槳數(shù)值模擬方法
采用求解雷諾平均N-S方程的“多重參考系法”對(duì)涵道螺旋槳的性能進(jìn)行計(jì)算,湍流模型采用SA湍流模型,并采用結(jié)構(gòu)網(wǎng)格進(jìn)行網(wǎng)格生成。
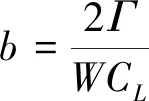
為驗(yàn)證數(shù)值模擬方法的可行性,對(duì)文獻(xiàn)[20] 中的NASA涵道螺旋槳模型進(jìn)行計(jì)算,幾何模型如圖2所示。該模型有3片槳葉,槳盤(pán)直徑0.381 0 m,槳轂直徑0.109 2 m,槳轂長(zhǎng)0.392 7 m,涵道外壁最大直徑0.464 3 m,涵道長(zhǎng)0.261 9 m,具體尺寸詳見(jiàn)文獻(xiàn)[20]。
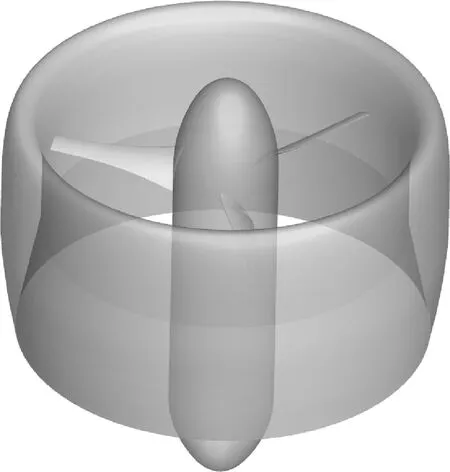
圖2 NASA涵道螺旋槳幾何模型Fig.2 Geometry model of NASA ducted propeller
對(duì)其進(jìn)行網(wǎng)格劃分,將計(jì)算區(qū)域分為 “旋轉(zhuǎn)域”與其外的“外流域”,如圖3所示,“旋轉(zhuǎn)域”包含部分內(nèi)壁、部分槳轂及槳葉,槳間間隙完全包含在旋轉(zhuǎn)域內(nèi),兩域流場(chǎng)交界面處采用通量的計(jì)算傳遞信息。生成341萬(wàn)及458萬(wàn)總網(wǎng)格數(shù)量的兩套網(wǎng)格,以驗(yàn)證網(wǎng)格無(wú)關(guān)性。341萬(wàn)總網(wǎng)格數(shù)量對(duì)應(yīng)的局部網(wǎng)格如圖4所示,槳葉第1層網(wǎng)格對(duì)應(yīng)的取1。
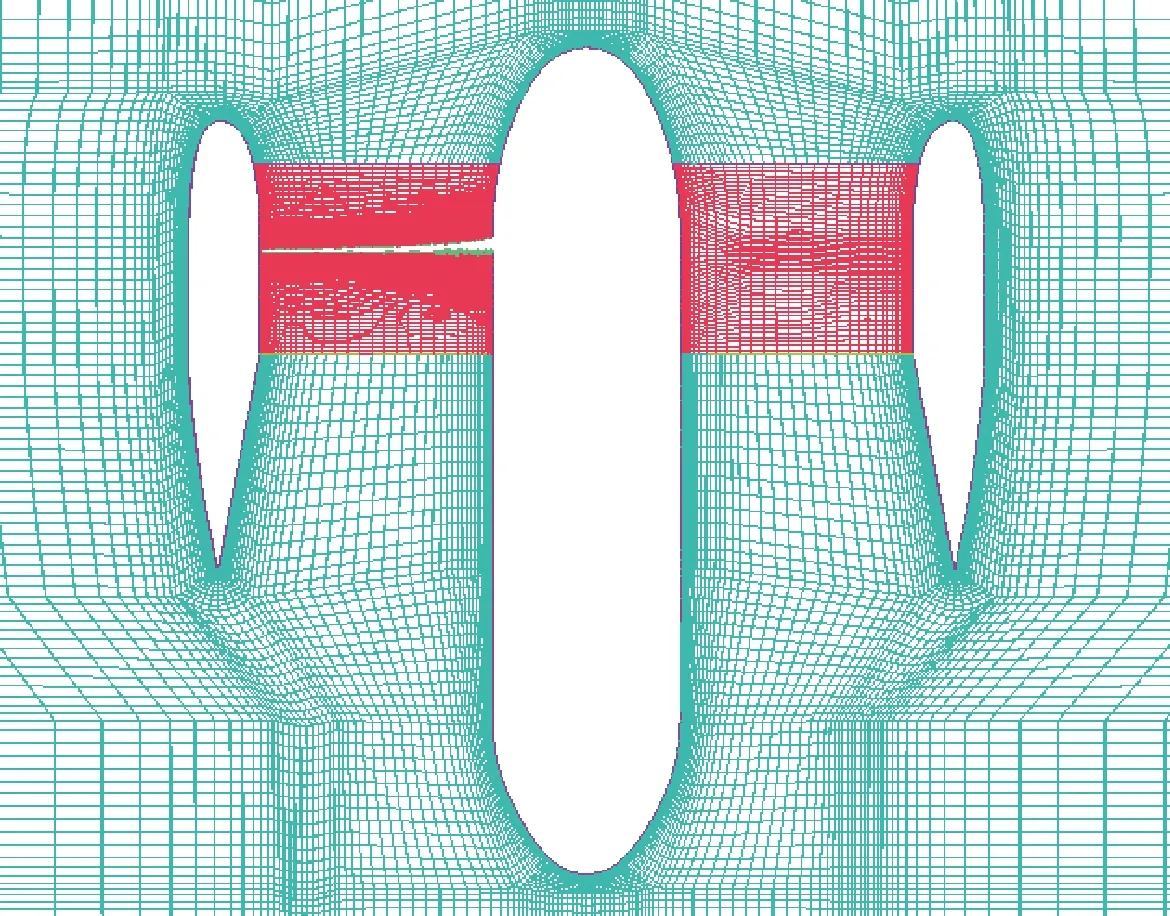
圖3 不同流域網(wǎng)格示意圖Fig.3 Grid sketch of different flow fields
采用上述方法對(duì)NASA涵道螺旋槳進(jìn)行計(jì)算,計(jì)算為懸停狀態(tài),轉(zhuǎn)速8 000 r/min,結(jié)果如表1 所示。
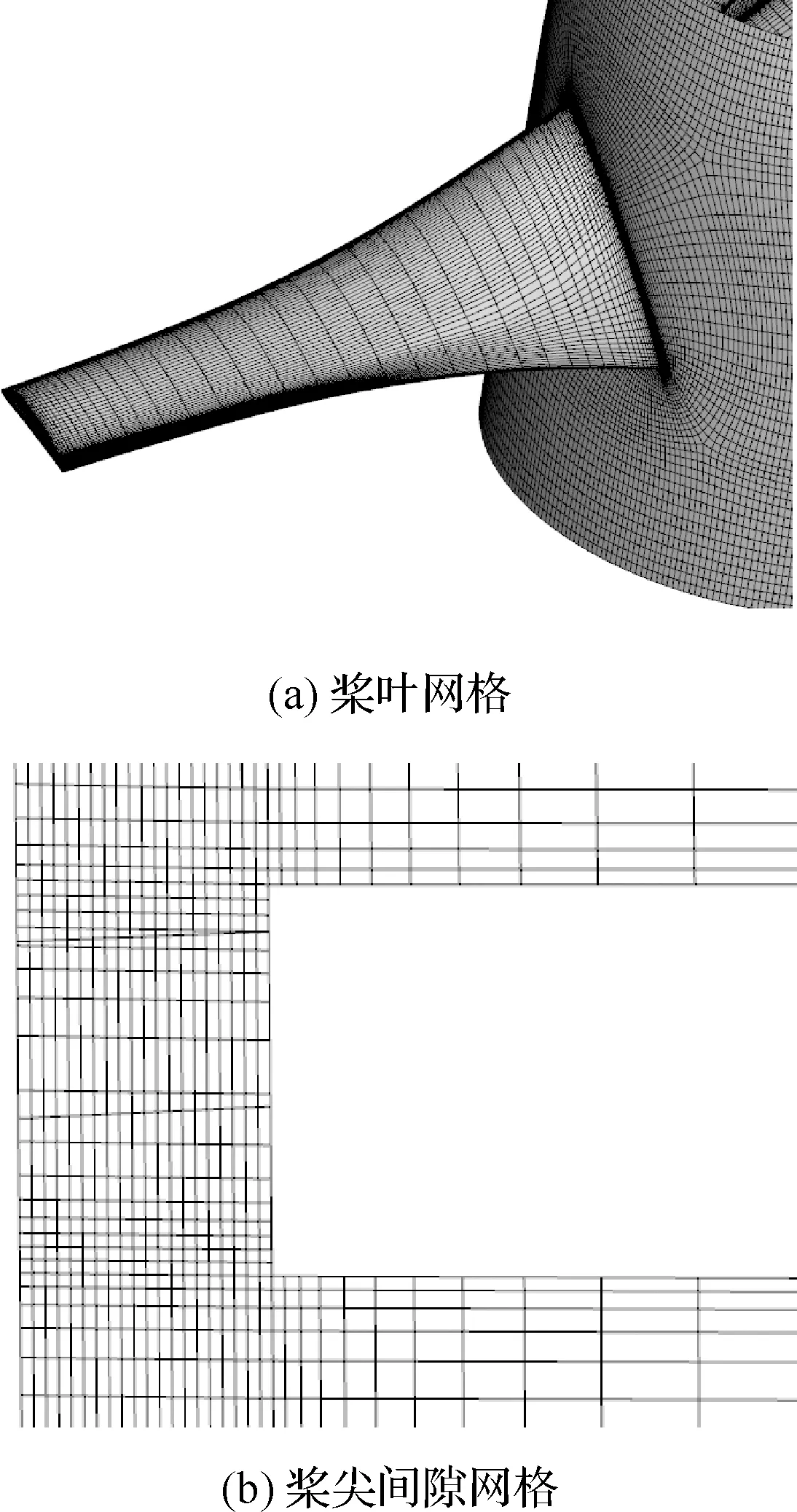
圖4 局部網(wǎng)格示意圖Fig.4 Schematic diagram of local mesh
兩種網(wǎng)格的計(jì)算結(jié)果相差不大,“341萬(wàn)網(wǎng)格總量”的計(jì)算結(jié)果相比實(shí)驗(yàn)值偏小,槳葉拉力誤差9.21%,扭矩誤差7.05%,涵道拉力誤差9.88%,所有誤差均在10%以?xún)?nèi),基本驗(yàn)證了所用數(shù)值模擬方法求解的可行性。下文進(jìn)行相關(guān)數(shù)值模擬時(shí)保持網(wǎng)格拓?fù)浣Y(jié)構(gòu)相同,網(wǎng)格總量不少于341萬(wàn)。
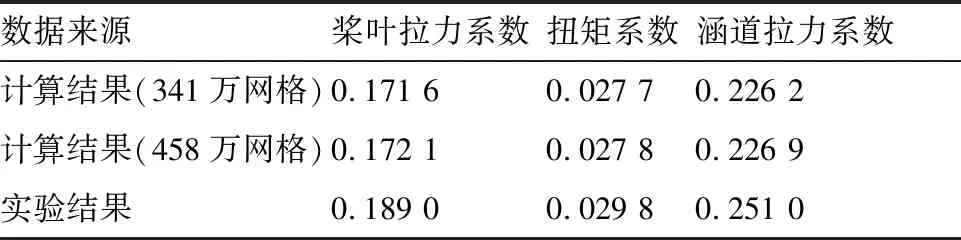
表1 氣動(dòng)力計(jì)算和實(shí)驗(yàn)結(jié)果對(duì)比
3 設(shè)計(jì)目標(biāo)及結(jié)果
3.1 設(shè)計(jì)目標(biāo)
采用快速設(shè)計(jì)方法進(jìn)行涵道螺旋槳槳葉設(shè)計(jì)。設(shè)計(jì)高度=0 km,來(lái)流速度=0 m/s,總拉力=300 N。涵道外形采用上述“NASA涵道”,取槳葉拉力占比=0.430。槳盤(pán)半徑=0.190 5 m,槳轂半徑=0.054 61 m,槳尖間隙001。螺旋槳轉(zhuǎn)速=8 000 r/min,槳葉數(shù)=8。
槳葉翼型采用圖5所示翼型族,翼型彎度保持不變,厚度由槳根至槳尖線性減小。由于翼型的彎度一致,且厚度變化較小,故認(rèn)為各翼型相同迎角下的氣動(dòng)力一致。給定設(shè)計(jì)迎角=2°,升力系數(shù)=0600,阻力系數(shù)=0023。

圖5 翼型示意圖Fig.5 Schematic diagram of airfoil
3.2 設(shè)計(jì)結(jié)果
槳葉弦長(zhǎng)及扭轉(zhuǎn)角設(shè)計(jì)結(jié)果如圖6所示。采用第2節(jié)數(shù)值模擬方法進(jìn)行涵道螺旋槳性能計(jì)算。
設(shè)計(jì)結(jié)果與計(jì)算結(jié)果如表2所示。可以看出,基于MRF的CFD計(jì)算得到的拉力、扭矩及功率載荷均小于設(shè)計(jì)結(jié)果,這說(shuō)明上述快速設(shè)計(jì)方法存在一定缺陷。可能的原因有兩方面:一方面,設(shè)計(jì)時(shí)給定的葉素氣動(dòng)力不能保證與實(shí)際相同,兩者存在一定誤差;另一方面,葉素的誘導(dǎo)速度不準(zhǔn)確,設(shè)計(jì)時(shí)采用的入流角偏小,使得槳葉的扭轉(zhuǎn)角偏小。
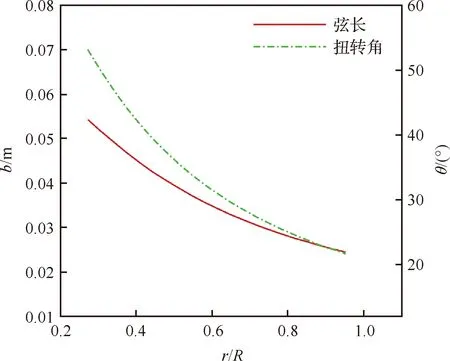
圖6 弦長(zhǎng)與扭轉(zhuǎn)角設(shè)計(jì)結(jié)果Fig.6 Design results of chord length and twist angle
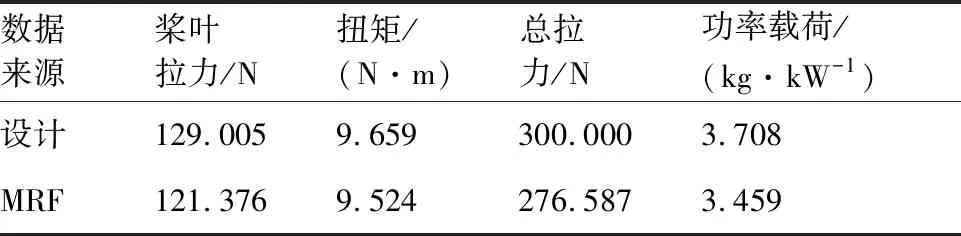
表2 涵道螺旋槳性能對(duì)比Table 2 Comparison of performance of ducted propeller
4 耦合CFD求解的高效設(shè)計(jì)方法
4.1 入流角修正
基于3.2節(jié)的分析,對(duì)文中的快速設(shè)計(jì)方法進(jìn)行完善。
對(duì)于給定的′,首先按1.3節(jié)中式(18)~式(23) 計(jì)算得到弦長(zhǎng)。但在計(jì)算槳葉氣動(dòng)力前,通過(guò)修正系數(shù),對(duì)′進(jìn)行修正:

(29)
再使用新的′根據(jù)式(16)~式(19)計(jì)算修正后的誘導(dǎo)速度、入流角及合速度,最后計(jì)算修正后的葉素氣動(dòng)力。
對(duì)′進(jìn)行修正是為了保證最小能量損失原則在修正后同樣滿(mǎn)足,以避免修正導(dǎo)致效率降低。
采用修正的快速設(shè)計(jì)方法對(duì)涵道螺旋槳槳葉進(jìn)行設(shè)計(jì),不同修正系數(shù)對(duì)應(yīng)的CFD計(jì)算結(jié)果如表3所示。可以看出,當(dāng)=105時(shí),CFD計(jì)算結(jié)果與設(shè)計(jì)值接近,說(shuō)明通過(guò)合理的修正,能夠提高設(shè)計(jì)的精度。
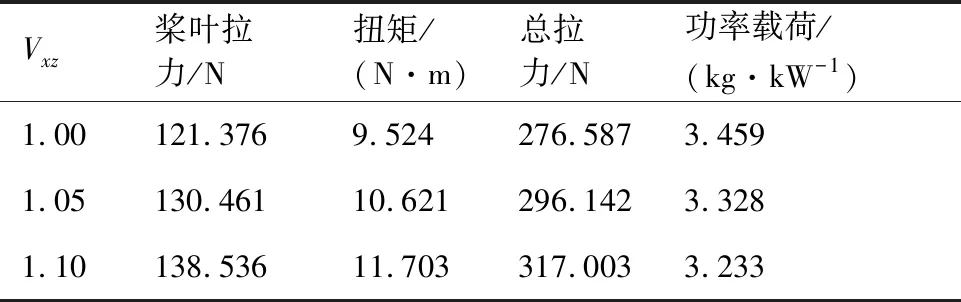
表3 不同修正系數(shù)下的涵道螺旋槳性能對(duì)比
4.2 氣動(dòng)力修正
葉素真實(shí)狀態(tài)下的迎角及升阻力系數(shù)與設(shè)計(jì)給定的值存在一定偏差,若忽略阻力的影響,可認(rèn)為氣動(dòng)力的偏差為迎角與升力系數(shù)的不匹配。因此,這里不改變升阻力系數(shù),通過(guò)修正迎角進(jìn)行氣動(dòng)力的修正。
4.3 拉力占比修正
實(shí)際設(shè)計(jì)時(shí),涵道外形根據(jù)設(shè)計(jì)而定,也是一個(gè)未知的變量,設(shè)計(jì)前往往不能確定設(shè)計(jì)狀態(tài)下拉力占比的準(zhǔn)確值。因此,設(shè)計(jì)前可首先給出的初值,在設(shè)計(jì)迭代中,根據(jù)CFD計(jì)算結(jié)果更新,從而使設(shè)計(jì)結(jié)果更準(zhǔn)確,也使設(shè)計(jì)方法適用于不同涵道外形的涵道螺旋槳。
4.4 修正參數(shù)求解
引入′修正對(duì)設(shè)計(jì)方法進(jìn)行改善,取得了較好的效果,但其前提是得到合理的。而不同設(shè)計(jì)狀態(tài)下可能不同,若通過(guò)試錯(cuò)來(lái)選取,可能需大量的CFD計(jì)算驗(yàn)證,使得設(shè)計(jì)效率降低。實(shí)際上,CFD計(jì)算結(jié)果可作為一種重要的參考,為的選取提供參考。因此這里提出一種通過(guò)CFD計(jì)算結(jié)果反解修正參數(shù)的方法。
該方法的思想是:通過(guò)構(gòu)造滿(mǎn)足CFD結(jié)果的葉素狀態(tài),求解真實(shí)狀態(tài)下的入流角,確定修正系數(shù);并對(duì)給定的葉素氣動(dòng)力進(jìn)行修正,修正設(shè)計(jì)給定的迎角;最后更新槳葉的拉力占比。具體步驟如下:
給定初始,以CFD求解得到槳葉的拉力為設(shè)計(jì)目標(biāo),采用修正的快速設(shè)計(jì)方法進(jìn)行槳葉設(shè)計(jì),得到設(shè)計(jì)的拉力及扭矩。
由于葉素阻力較小,且入流角一般較大,因此忽略阻力影響時(shí),由式(24)、式(25)可知:
(30)
槳葉拉力及扭矩實(shí)際反映了真實(shí)的入流角。故通過(guò)迭代求解,最終得到與CFD所得相同的設(shè)計(jì)結(jié)果,此時(shí)的即為入流角修正系數(shù)。
獲得的同時(shí)得到修正后的入流角,已知涵道螺旋槳的扭轉(zhuǎn)角,進(jìn)而根據(jù)式(28) 求得各葉素的迎角,求其均值得到修正迎角:

(31)
最后根據(jù)CFD計(jì)算得到的總拉力及槳葉拉力,由式(6)求得真實(shí)的拉力占比。
4.5 耦合CFD求解的涵道螺旋槳槳葉設(shè)計(jì)
基于以上方法及分析,提出耦合CFD修正的涵道螺旋槳槳葉高效設(shè)計(jì)方法,步驟如下:
根據(jù)1.3節(jié)快速設(shè)計(jì)方法,設(shè)計(jì)得到初始槳葉(弦長(zhǎng)及扭轉(zhuǎn)角分布)。
通過(guò)CFD計(jì)算獲得槳葉拉力及扭矩。
根據(jù)CFD計(jì)算結(jié)果求解修正系數(shù)及修正迎角,并更新槳葉拉力占比。
根據(jù)求得的修正參數(shù)采用修正的快速設(shè)計(jì)方法進(jìn)行再設(shè)計(jì)。
重復(fù)步驟2~步驟4,得到滿(mǎn)足設(shè)計(jì)要求的結(jié)果。
設(shè)計(jì)流程如圖7所示。
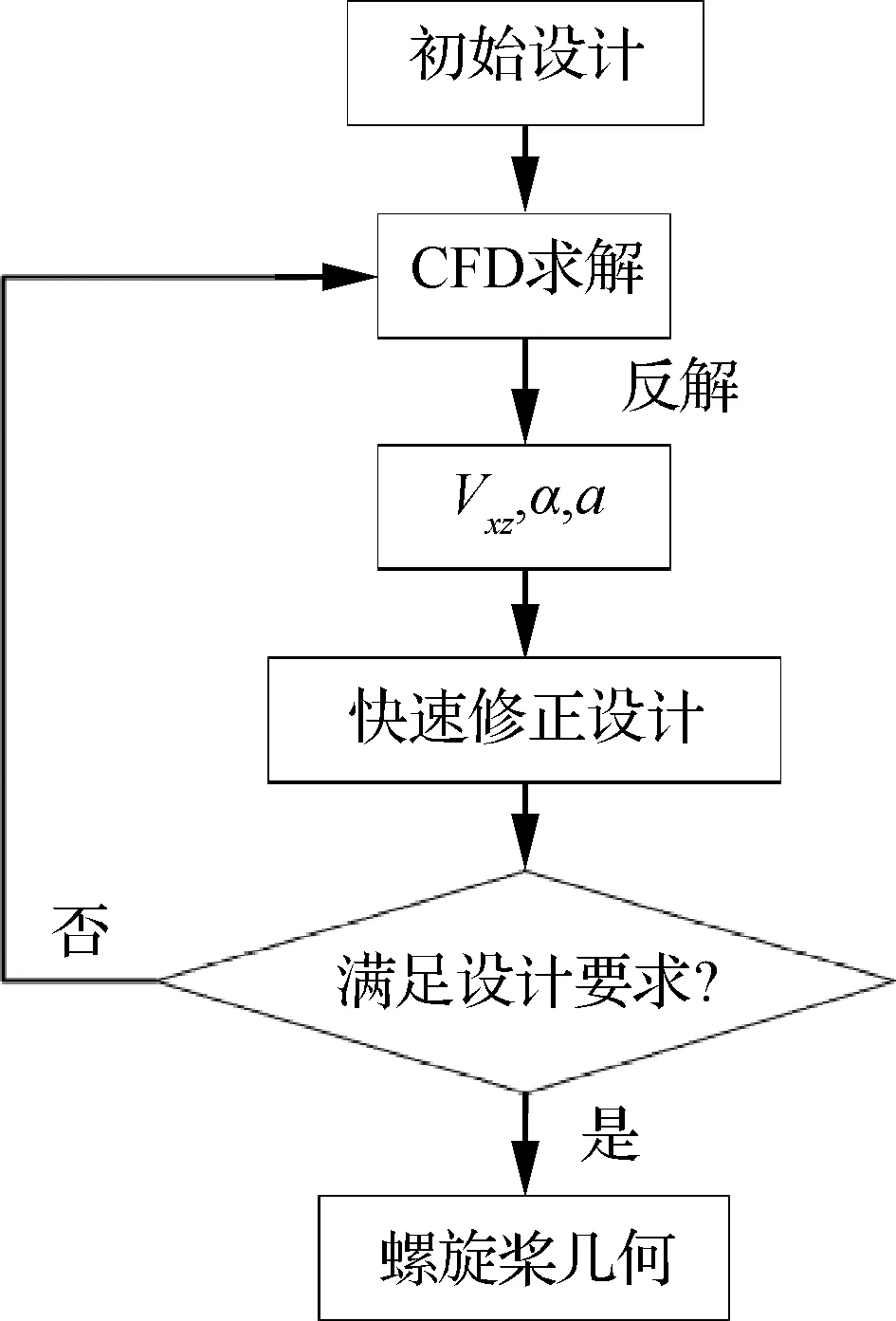
圖7 耦合CFD求解的涵道螺旋槳槳葉設(shè)計(jì)流程Fig.7 Design process of ducted propeller blade coupled with CFD correction
5 結(jié)果與分析
5.1 修正結(jié)果對(duì)比
采用修正設(shè)計(jì)方法對(duì)表2的初始結(jié)果進(jìn)行修正,以此再設(shè)計(jì),結(jié)果如表4所示。修正2次后的CFD結(jié)果已經(jīng)十分接近設(shè)計(jì)結(jié)果,對(duì)應(yīng)=1094,=1215°,=0438。設(shè)計(jì)得到的涵道螺旋槳幾何如圖8所示。
為證明方法的可行性,對(duì)表3中=110的初始設(shè)計(jì)進(jìn)行修正及再設(shè)計(jì),結(jié)果如表5所示。同樣,修正2次后,CFD結(jié)果基本與設(shè)計(jì)結(jié)果相同,滿(mǎn)足設(shè)計(jì)要求。一方面,說(shuō)明文中的設(shè)計(jì)方法具備快速收斂的特點(diǎn);另一方面,設(shè)計(jì)結(jié)果與CFD計(jì)算結(jié)果間的差距隨著設(shè)計(jì)迭代次數(shù)的增加而逐漸減小,最終趨于一致。

表4 修正前后涵道螺旋槳性能
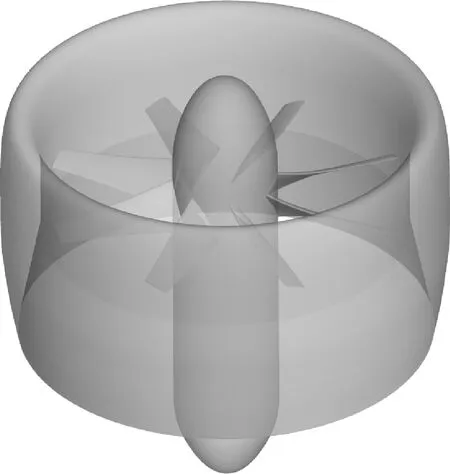
圖8 涵道螺旋槳幾何Fig.8 Geometry of ducted propeller
經(jīng)2次修正設(shè)計(jì)后,各修正系數(shù)分別為:=1095,=1187°,=0435,與上述修正參數(shù)結(jié)果基本相同。進(jìn)一步對(duì)比弦長(zhǎng)及扭轉(zhuǎn)角設(shè)計(jì)結(jié)果,如圖9所示,兩者幾何也基本一致,說(shuō)明不同初始位置最終收斂至同一結(jié)果。表明文中采用的設(shè)計(jì)方法是收斂的,同時(shí)具備較好的魯棒性。
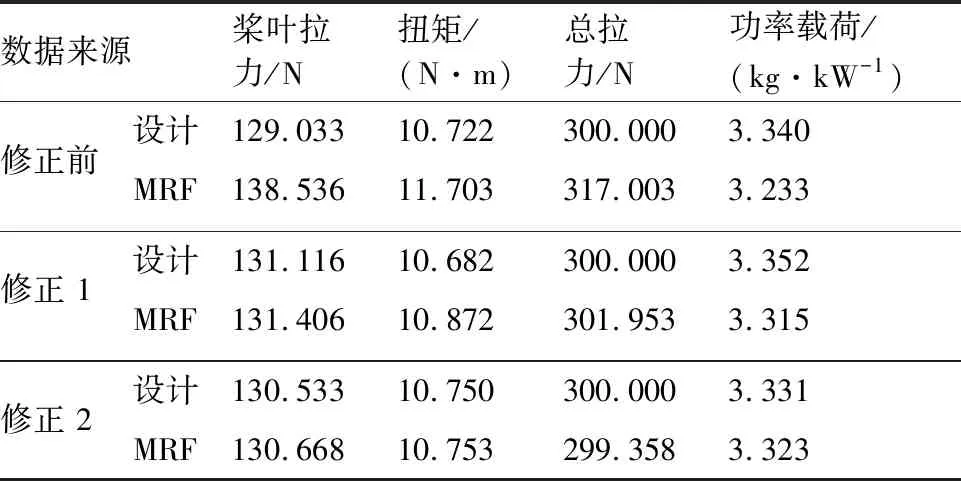
表5 修正前后涵道螺旋槳性能(Vxz=1.1)
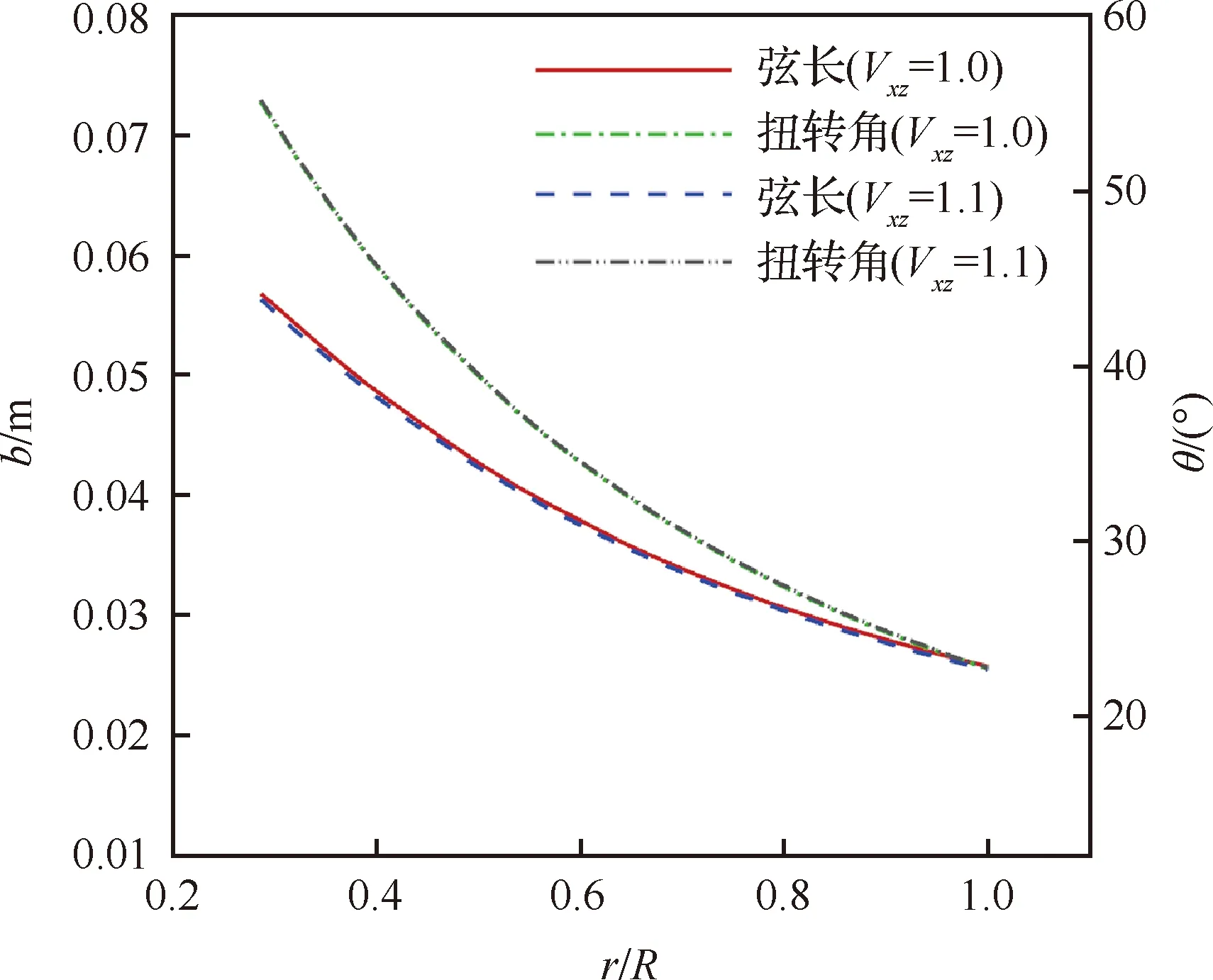
圖9 不同初始修正系數(shù)設(shè)計(jì)得到的弦長(zhǎng)與扭轉(zhuǎn)角設(shè)計(jì)對(duì)比Fig.9 Comparison of chord length and twist angle obtained by design of different initial correction factors
5.2 不同涵道外形設(shè)計(jì)驗(yàn)證
為進(jìn)一步驗(yàn)證設(shè)計(jì)方法,設(shè)計(jì)一種小型涵道螺旋槳。并采用圖10所示的無(wú)擴(kuò)張及收縮出口的簡(jiǎn)易涵道外形,以檢驗(yàn)設(shè)計(jì)方法在不同涵道外形下的可行性。
圖10 簡(jiǎn)易涵道外形示意圖Fig.10 Schematic diagram of a simple shape of duct
取設(shè)計(jì)高度=0 km,來(lái)流速度=0 m/s,總拉力=15 N,槳盤(pán)半徑=0.050 m,槳轂半徑=0.020 m,槳尖間隙001。取螺旋槳轉(zhuǎn)速=20 000 r/min,槳葉數(shù)N=8,初始槳葉拉力占比初值=0500。同樣采用圖2所示翼型族,給定葉素設(shè)計(jì)迎角=2°,升力系數(shù)=0600,阻力系數(shù)=0023。
初始設(shè)計(jì)取=1000,小型涵道螺旋槳的設(shè)計(jì)結(jié)果如圖11及圖12所示,修正前后的性能見(jiàn)表6。可以看出,設(shè)計(jì)結(jié)果與計(jì)算結(jié)果趨于收斂,經(jīng)過(guò)2次修正設(shè)計(jì),基本滿(mǎn)足設(shè)計(jì)要求,對(duì)應(yīng)=1060,=0574°,=0581。

圖11 小型涵道螺旋槳弦長(zhǎng)與扭轉(zhuǎn)角設(shè)計(jì)結(jié)果Fig.11 Design results of chord length and twist angle of small ducted propeller
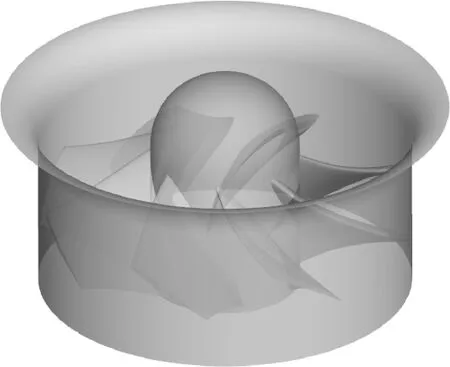
圖12 小型涵道螺旋槳幾何Fig.12 Geometry of small ducted propeller
涵道外形對(duì)設(shè)計(jì)的影響體現(xiàn)在槳葉拉力占比之上。對(duì)于該簡(jiǎn)易涵道,可認(rèn)為噴流無(wú)擴(kuò)張和收縮,而槳轂的存在使得噴流存在一定的收縮,因此設(shè)計(jì)結(jié)果>0500,符合動(dòng)量理論的結(jié)論。同時(shí)也驗(yàn)證了本文所采用的設(shè)計(jì)方法適用于不同涵道形式。
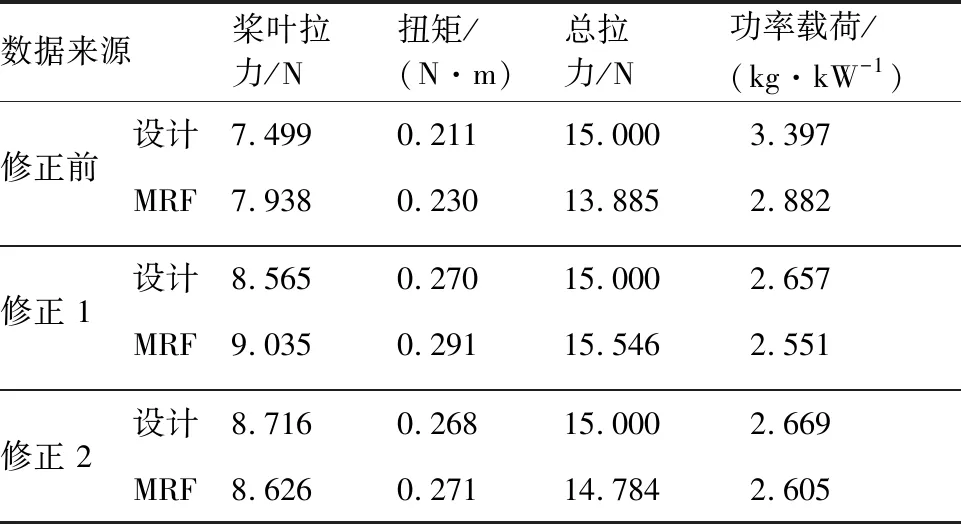
表6 修正前后小型涵道螺旋槳性能
5.3 有來(lái)流狀態(tài)設(shè)計(jì)驗(yàn)證
以上設(shè)計(jì)均在無(wú)來(lái)流狀態(tài)下進(jìn)行設(shè)計(jì),為驗(yàn)證設(shè)計(jì)方法在有來(lái)流狀態(tài)下的可行性,在3.1節(jié)設(shè)計(jì)狀態(tài)的基礎(chǔ)上,改變來(lái)流速度為=20 m/s,同時(shí)改變槳葉拉力占比初值=06,以此進(jìn)行設(shè)計(jì)。
有來(lái)流狀態(tài)涵道螺旋槳的設(shè)計(jì)結(jié)果如圖13及圖14所示,設(shè)計(jì)前后的性能見(jiàn)表7, 最終修正參數(shù)=1078,=1056°,=0577。可以看出,經(jīng)過(guò)2次修正設(shè)計(jì)后,設(shè)計(jì)與計(jì)算間的拉力誤差基本控制在2%以?xún)?nèi),驗(yàn)證了文中涵道螺旋槳槳葉設(shè)計(jì)方法在有來(lái)流狀態(tài)下設(shè)計(jì)的可行性。
以上設(shè)計(jì)驗(yàn)證均表明,文中的設(shè)計(jì)結(jié)果收斂于CFD計(jì)算結(jié)果。因此,只需保證CFD計(jì)算的準(zhǔn)確性,則能保證文中設(shè)計(jì)方法設(shè)計(jì)的準(zhǔn)確性。

圖13 有來(lái)流狀態(tài)涵道螺旋槳弦長(zhǎng)與扭轉(zhuǎn)角設(shè)計(jì)結(jié)果Fig.13 Design result of chord length and twist angle of ducted propeller in incoming flow state

圖14 有來(lái)流狀態(tài)涵道螺旋槳幾何Fig.14 Geometry of ducted propeller in incoming flow state

表7 有來(lái)流狀態(tài)修正前后涵道螺旋槳性能
6 結(jié) 論
本文建立了基于葉素動(dòng)量理論的涵道螺旋槳快速設(shè)計(jì)方法,并通過(guò)耦合CFD計(jì)算對(duì)葉素入流角及迎角進(jìn)行修正,提出了一種涵道螺旋槳槳葉高效設(shè)計(jì)方法,并通過(guò)對(duì)不同狀態(tài)的涵道螺旋槳進(jìn)行設(shè)計(jì)及計(jì)算,驗(yàn)證了方法的可行性。得到的結(jié)論如下:
1) 基于葉素動(dòng)量理論的快速設(shè)計(jì)方法,設(shè)計(jì)前不能準(zhǔn)確地給出葉素氣動(dòng)力及槳葉拉力占比,導(dǎo)致設(shè)計(jì)的入流角與實(shí)際結(jié)果存在一定差距,因此造成設(shè)計(jì)結(jié)果與CFD計(jì)算結(jié)果間的偏差。
2) 涵道外形對(duì)設(shè)計(jì)的影響體現(xiàn)在槳葉拉力占比之上,而槳葉拉力、扭矩的比例反映了葉素入流角信息。通過(guò)對(duì)CFD計(jì)算結(jié)果進(jìn)行反解,可得到真實(shí)的葉素入流角,進(jìn)而求得真實(shí)的葉素迎角,同時(shí)求得真實(shí)的槳葉拉力占比。
3) 通過(guò)求解入流角修正系數(shù)、修正迎角及真實(shí)槳葉拉力占比,并以此進(jìn)行涵道螺旋槳槳葉的再設(shè)計(jì),可得到趨于設(shè)計(jì)要求的結(jié)果。不同初始結(jié)果、不同涵道外形及不同設(shè)計(jì)狀態(tài)的設(shè)計(jì)驗(yàn)證表明,文中設(shè)計(jì)方法基本進(jìn)行2次CFD計(jì)算修正與再設(shè)計(jì)便能滿(mǎn)足設(shè)計(jì)要求,設(shè)計(jì)高效。
4) 本文設(shè)計(jì)方法的設(shè)計(jì)結(jié)果與CFD計(jì)算結(jié)果間的差距隨著設(shè)計(jì)迭代次數(shù)的增加而逐漸減小,設(shè)計(jì)結(jié)果最終收斂于CFD計(jì)算結(jié)果。因此,確保CFD計(jì)算的準(zhǔn)確性,則能夠確保設(shè)計(jì)方法的準(zhǔn)確性。
猜你喜歡
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
