智能汽車運動控制算法綜述*
2022-09-05 06:11:56楊薪敬
汽車文摘 2022年9期
楊薪敬
(重慶交通大學交通運輸學院,重慶400074)
主題詞:智能汽車 運動控制 控制方法 算法
縮略語
MIMO Multi-Input Multi-Output PSO Particle Swarm Optimization HIL Hardware-In-the-Loop SMC Sliding Mode Control DOB Disturbance OBserver PID Proportional Integral Derivative
1 引言
隨著以人工智能為核心的信息化新技術迅速發展,汽車智能化發展的進程在不斷加快。實現完全智能駕駛是智能汽車未來發展的目標,對傳統汽車行業將產生顛覆性變革。我國高度重視汽車信息化、智能化發展,出臺一系列政策為智能化汽車保駕護航,其中在2020年末提出的《智能網聯汽車技術路線圖2.0》中,明確了3個發展目標時間點(表1)。運動控制是智能汽車實現智能駕駛的核心技術之一,它的表現不僅決定汽車能否安全行駛,還影響汽車的舒適性。按照其控制目標的不同,運動控制問題按照與時間參數的關系可以分為路徑跟蹤和軌跡跟蹤2 類。路徑跟蹤中參考路徑和汽車運動時間參數沒有關系,而后者由時間參數來決定參考軌跡。通常來說,車輛的運動控制同時包括橫向運動控制與縱向運動控制,汽車運動時二者存在耦合關系,相互影響。為了減少研究難度,通常研究人員將二者解耦,分別進行研究,因此汽車運動控制通常又劃分為包括橫向控制、縱向控制和橫縱向協同控制。
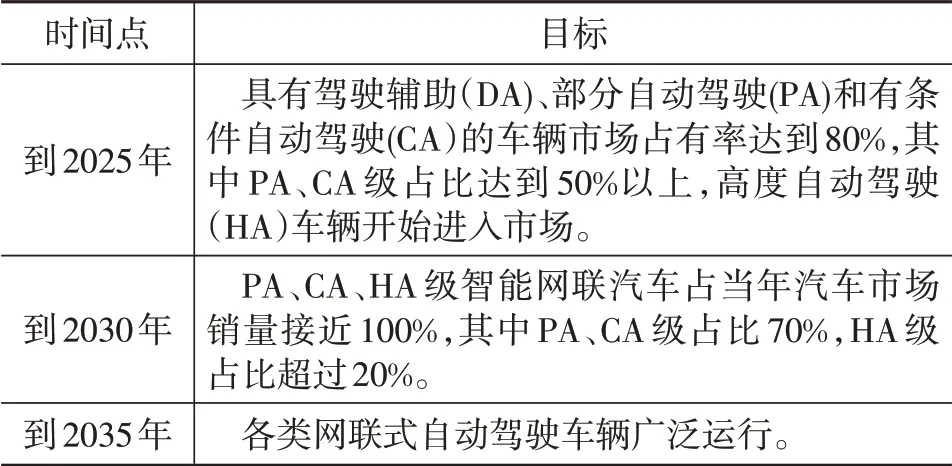
表1 中國智能汽車發展計劃表[1]
本文首先闡述汽車運動控制的3 種分類,同時詳細歸納分析了模糊控制、自適應控制、模型預測控制、神經網絡控制汽車運動控制算法的研究現狀及特點。同時指出當前技術發展的不足和未來潛在的研究方向。
2 運動控制分類
2.1 橫向控制
汽車行駛并非單純僅受汽車驅動力,同時也受到來自地面和空氣傳來的側向力。橫向控制其性能取決于汽車的操縱穩定性,其核心原理是通過控制操縱汽車的轉向系統,包括適當控制調節汽車的橫擺角、前輪偏角和轉向盤轉角參數變量,使汽車沿著接近期望的參考路徑平穩行駛,盡可能地減少誤差,確保控制精度。當前,國內外專家提出了一系列看法,研究集中在路徑跟蹤精度和車身穩定性,結合速度、橫向誤差和增量的變化率參數為標準綜合衡量跟蹤性能。
2.2 縱向控制
縱向控制主要涉及到汽車的動力性和制動性。通過協調汽車驅動機構和制動執行器(主要執行機構為節氣門踏板和制動踏板),根據行駛中出現的不同情況改變其縱向行駛的速度和加速度,達到期望的安全行駛距離,實現自主穩定行駛。國內外學者對縱向控制系統主要采用直接式控制方案(圖1)和分層控制方案(圖2)。其中直接式方案通過控制器直接控制車輛的節氣門開度和制動壓力,實現對車輛運動的控制。而在分層控制方案中,上層控制器基于前車與本車的行車信息(包括相對速度、相對距離、前后車加速度和行車工況),綜合考慮經濟型、安全性和舒適性因素計算得到期望的加速度和扭矩,下層控制器根據上層控制器求取期望命令,協調驅動系統和制動系統,實現本車的行車速度/加速度控制。由于發動機是非線性時變系統,直接控制節氣門開度具有不確定性,所以直接式控制往往很難達到令人滿意的效果,因此大多研究采用分層式控制。

圖1 直接式縱向控制
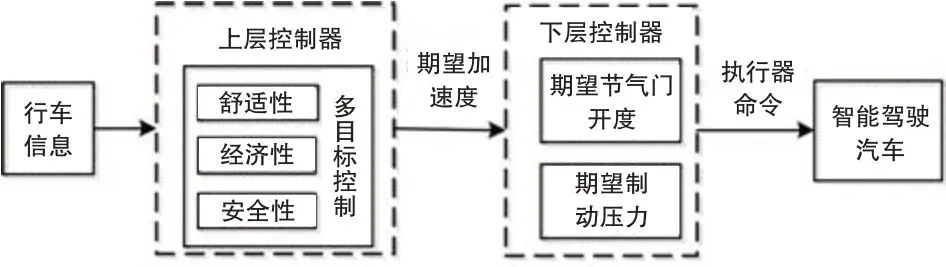
圖2 分層式縱向控制
2.3 橫縱向協同控制
橫縱向協同控制就是同時控制橫向運動與縱向運動。汽車在實際行駛時,通常情況下會受到來自多個方向的作用力。但是汽車行駛工況復雜,汽車橫向運動與縱向運動之間存在著復雜的強耦合關系,因此可看作為一個高度非線性的運動約束系統,存在車輛參數不確定性的問題,這使得實際條件下橫縱向協調控制比較困難。橫縱向協同控制一般由2層控制器組成,上層控制器的作用是通過控制汽車運動時轉向盤的轉角,縮小橫向與航向之間的偏差,實現汽車對期望路徑跟蹤的準確性。下層控制器的作用是控制執行器,求取汽車節氣門開度和制動力矩,達到合理控制行車速度的目的。橫縱向協同控制的效果關乎能否實現對路徑規劃中期望路徑的準確跟蹤,而且對汽車行駛的穩定性、舒適性和安全性也有較大提升。
汽車運動控制分類特點和參考文獻見表2。
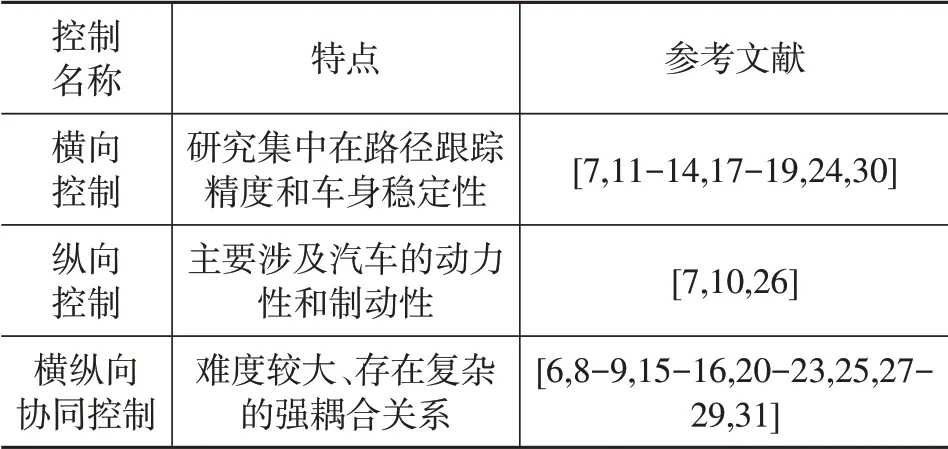
表2 汽車運動控制分類
3 汽車運動控制算法分類
汽車運動控制算法有多種,國內外學術屆和汽車行業研究人員也一直在進行研究與改進。對于控制算法有如下評價維度:
(1)實時性;
(2)魯棒性;
(3)精準性;
(4)適應性;
(5)抗擾動性。
各種控制算法各有優勢,主要有模糊控制、神經網絡控制、模型預測控制(Model Predictive Control,MPC)、自適應控制和滑膜控制(表3),其它控制算法中PID控制是經典的算法。
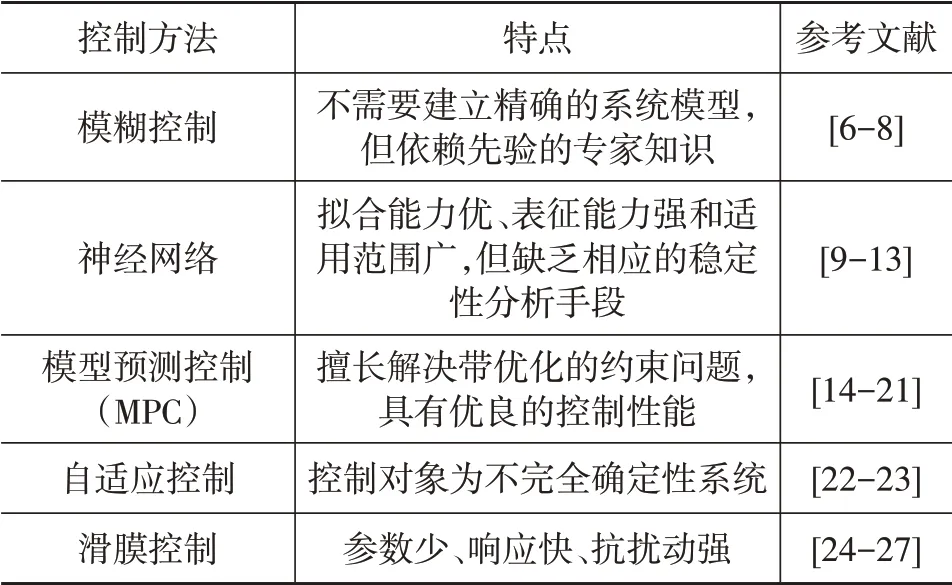
表3 控制算法分類
3.1 模糊控制
模糊控制是一種基于模糊數學思想的智能控制方法,主要包括模糊集合化、模糊邏輯推理和模糊語言變量。該控制理論優勢在于不需要建立精確的系統模型,但依賴先驗的專家知識,需要進行大量的試驗標定,缺點在于自身學習能力較差。近年來,針對其研究較少,且通常為與其它控制方法結合使用。例如,合肥工業大學張炳力等通過利用神經網絡較強自學能力的優勢,結合模糊控制理論設計軌跡跟蹤控制器,在直道或彎道較低速度的限制行駛場景下,該方法具有良好的控制效果,精度較高、穩定好。但在其它行駛條件下,控制效果一般。重慶交通大學的雷敏分別利用模糊控制結合PI控制算法設計了縱向控制器,基于模糊預瞄PD 控制算法設計了橫向控制器,所設計控制器能夠消除橫縱向運動的影響。文獻[8]考慮到車輛行駛過程中車輛質量和縱向速度變化的影響以及路面附著系數的影響,設計了一種具有加性范數有界不確定性(Additive Norm-Bounded Uncertainties)的T-S模糊模型,在模糊Lyapunov函數框架下設計一種基于模糊觀測器的車輛動力學輸出反饋轉向控制方法。試驗證明基于T-S 模糊觀測器的輸出反饋控制器相對于CarSim中嵌入的驅動器模型具有一定優勢。
3.2 基于神經網絡的汽車運動控制
神經網絡作為人工智能的重要發展方向,在智能汽車環境感知、運動控制、行為決策領域具有廣泛應用的前景。深度學習具有擬合能力優、表征能力強和適用范圍廣的特點。與傳統的控制方法不同,基于神經網絡的汽車運動控制研究尚且處于起步階段。
北京工業大學的張吉研究了在復雜場景下的智能化運動控制模型和方法,提出“元動作決策-車輛控制”二分層智能汽車智能運動控制模型。在此基礎上,使用深度學習算法對車輛控制系統進行優化,提出了基于深度確定性策略梯度的車輛控制方法。文獻[10]設計了一種基于深度強化學習的新型自動制動系統,并通過試驗研究表明,在不同的不確定環境下該系統均能表現出理想的控制行為,并且避免了碰撞,也不會發生任何錯誤。文獻[11]針對車輛在極限行駛條件下,提出了一種新的橫向運動控制方法,控制方案由一個魯棒轉向控制器和一個自適應神經網絡(Adaptive Neural Network,ANN)近似器組成。該方法可以在保持自主車輛橫擺穩定性,以及在行駛條件限制下最小化橫向路徑跟蹤誤差。同時將車輛的橫擺穩定性保持在或接近輪胎摩擦的物理極限。文獻[12]針對自主車輛的路徑跟蹤任務,提出了一種雙隱層輸出反饋神經網絡、快速非奇異終端滑模控制策略,并通過李雅普諾夫方程驗證了控制系統的穩定性。與常規滑模控制器和非奇異終端滑模控制器相比,所設計的控制算法具有更高的跟蹤精度、更快的收斂速度和更強的魯棒性。文獻[13]為了提高車輛的橫向運動控制能力,提出了一種基于改進RBF 神經網絡的滑模控制策略。用RBF 神經網絡代替滑模結構的切換控制。在滑模控制的基礎上,采用改進的粒子群優化方法對RBF 網絡進行了優化,使得滑模控制速度更快,抖振抑制效率更高。
基于神經網絡的控制系統,具有不依賴于車輛動力學模型的優勢,但是目前研究較少,主要問題在于缺乏相應的穩定性分析手段。同時由于汽車行駛要求代碼具有較高的安全性和可解釋性,因此嚴重限制了神經網絡技術在實車上的應用。
3.3 模型預測控制(MPC)
模型預測控制(Model Predictive Control,MPC)擅長解決帶優化的約束問題,具有優良的控制性能,廣泛應用于汽車的橫向控制研究中。對于模型預測控制,重慶交通大學相關團隊開展了一系列研究。邵毅明教授等人為解決在車速較高時汽車跟蹤效果的問題,綜合考慮輪胎側偏角對于車輛行駛穩定性的影響,設計一種線性時變模型預測控制器。該方案即使在車速較高時的行駛工況下控制器依然能實現對參考軌跡的準確跟蹤。路宏廣等為解決在復雜工況中傳統模型跟蹤控制精度不高、魯棒性差等一系列問題,設計一種魯棒模型預測軌跡跟蹤控制策略。在不同行駛工況下,該控制器能夠在保證智能駕駛車輛跟蹤精度的前提下,提高車輛行駛的穩定性,同時具有較強的魯棒性。陳亞偉等設計了一種基于多輸入、多輸出模型預測控制(MIMO-MPC)方法的自主應急轉向系統,該系統的優點在于比傳統單輸入、單輸出模型預測控制效果更好。
長安大學高奇提出在已知車輛行駛軌跡的情況下,通過純跟蹤算法計算橫向偏差,結合模型預測控制算法的車輛橫向控制策略,并通過仿真驗證。吉林大學的鐘思琪研究了在不同場景下的跟蹤控制方法,為解決曲線型目標路徑的跟蹤問題,提出了基于近似跟蹤誤差的MPC路徑跟蹤橫向控制方法,針對非線性MPC復雜程度高的問題,進一步提出了分段線性近似誤差的線性時變路徑跟蹤控制方法,并且通過實車驗證了有效性。張冰博士研究了全線控電動汽車在不同行駛模式下的軌跡跟蹤控制方法,得到了更高效的智能駕駛體驗。Taghavifar 等研究了基于多約束非線性預測控制模式的自主地面車輛路徑跟蹤控制器設計方法,該方法提高了車輛的瞬態性能,并考慮了防側翻準則。
3.4 自適應控制
自適應控制方法的控制對象為不完全確定性系統,符合汽車行駛過程,該算法優點在于可以依據數據信息實時調節控制系統的自適應率。蘇樹華等提出了一種機器人駕駛車輛橫向自適應反演切換控制方法,從而實現不同速度工況下的車輛穩定轉向和路徑跟蹤。文獻[23]提出了一種自適應軌跡跟蹤策略的半實物仿真研究,該策略由一種基于知識的自適應機制組成,能夠自動引導裝甲車沿預定路徑前進。針對建立的汽車模型,利用粒子群算法(PSO)建立知識庫,根據不同的車速和航向誤差組合對控制器參數進行優化。同時,開發了自適應機構實現自動調整控制器參數。該自適應控制器能夠成功地引導裝甲車沿HIL道路行駛,橫向誤差降低了87%。
3.5 滑模控制
滑動模式控制(簡稱滑模控制)具有參數少、響應快和對外抗擾度能力強的特點。Tagne 等設計和驗證了基于自主高階車輛滑模控制的車輛橫向控制器,根據多個試驗方案表明該方法具有良好的魯棒性。中南大學自動化學院余伶俐等提出一種分布式橫縱向有限時間滑模控制策略,用于實現車輛隊列橫縱向控制。Norouzi 等人設計了一種用于智能駕駛車輛的自動變道控制器。采用了自適應滑模控制。在自適應滑模控制中,為了避免抖振,引入了模糊邊界層。對基于滑動的開關增益采用自適應控制律,該自適應控制律避免了計算系統不確定性上界的問題。Akermi 等提出了一種新型滑模控制(SMC)的自動車輛路徑跟蹤控制策略。模型包括滑模控制、徑向基函數神經網絡(RBFNN)和干擾觀測器(DOB)算法,其中由模糊系統提供SMC 增益的自動調整,以補償系統參數的變化。DOB 用于估計失配干擾,RB?FNN 用于評估不確定性。將該控制器應用于高速極限行駛條件下和不同路面附著條件下的自主車輛路徑跟蹤問題。
3.6 其它控制方法
江蘇大學臧勇考慮到汽車行駛全局環境具有時變性,單一控制方法無法解決全局狀態的差異性需要,采取可拓控制方法,完成多區域切換控制,全局的跟蹤控制精度得到提高。文獻[29]針對智能駕駛汽車橫向和縱向動力學的耦合控制問題,采用雙耦合控制器:其中第1個控制器采用李雅普諾夫控制技術,而第2 個控制器采用帶滑模的沉浸不變方法,從而確保對參考軌跡的魯棒跟蹤,并且重點考慮到車輛橫向和縱向動力學之間的強耦合的影響。
PID控制是經典的控制算法之一,其結構簡單,可靠性強,應用成熟,是工程應用中使用最廣的控制器,在學術研究中多用于汽車縱向控制。Wang 等基于PID 控制,設計了一種PID 反饋控制的智能車輛路徑跟蹤控制策略。該控制策略能夠保證智能汽車在不同速度下的路徑跟蹤,具有良好的跟蹤精度、實時性和車輛行駛穩定性。作為最為成熟的控制器,將PID算法與其它控制算法結合,亦是研究中常用的思路,例如文獻[31],提出一種基于MPC與PI控制器結合的路徑跟蹤協調控制方法。
4 總結
當前,針對智能駕駛汽車的橫縱向控制研究已經取得豐碩的研究成果,但依然存在一些不足,未來研究應專注以下5方面的改進。
(1)理論研究應加強實踐考驗。一些控制理論僅提出理論,或者在仿真軟件中進行驗證,并未在實車環境中驗證。
(2)汽車在實際行駛中面臨的實際工況復雜度遠大于實驗仿真設定的復雜度。在學術上研究多集中在側向加速度較小的工況下,對于極限工況的研究應該深入。有研究表明智能汽車在中高速下,道路曲率的變化對軌跡跟蹤控制精度影響較大。同時道路環境復雜,尤其山區道路曲折坎坷,需要充分考慮山區道路曲率不連續、路面突變、氣候變化、隧道和下坡路段多、地面附著系數變化大的復雜工況,才能解決智能汽車行駛中的安全性、穩定性和舒適性,推進智能駕駛汽車的大規模應用。
(3)為了簡化研究難度,對于汽車控制研究多采用車輛二自由度模型。但當行駛工況復雜時,二自由度模型并不能準確反映車輛動力學特性。輪胎也會出現不同的程度的非線性特征。因此,未來研究中需要建立更高自由度的動力學模型,當然這會增加控制的難度。
(4)多考慮復雜工況下的橫縱向協同控制問題。一些研究對于橫縱向控制進行解耦,雖然降低了難度,但是汽車行駛工況復雜,在實際工況中橫縱向協同控制不可避免,建議多進行汽車橫縱向協同控制研究。
(5)單一算法缺點明顯,多算法融合發展成為趨勢。越來越多的算法互相融合,相互協同控制,彌補互相的不足,逐步成為智能汽車運動控制的研究趨勢。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37