分布式混合電推進飛行器技術
2022-09-05 12:25:10朱炳杰楊希祥宗建安鄧小龍
航空學報 2022年7期
朱炳杰,楊希祥,宗建安,鄧小龍
國防科技大學 空天科學學院,長沙 410073
隨著全球航空業的飛速發展,越來越多的航空研發單位和制造商將目光聚焦于航空節能、環保及可持續性,動力系統革新尤為受關注。在眾多創新概念中,分布式混合推進系統技術展現出了明顯的發展潛力。分布式混合電推進系統,是指通過傳統發動機帶動發電機發電,為分布在機翼或機身的多個電機/螺旋槳提供電力,并由電機驅動螺旋槳提供絕大多數或全部推力(發動機可部分提供或不提供推力)的一種新型推進系統概念。
與傳統的動力推進相比,分布式混合電推進系統改善了原有飛機氣動結構、大幅提高等效涵道比、降低油耗及減少噪聲和排放。這不僅是商用飛機的福音,低阻力的氣動外形、高能效的推進系統對于軍用小型無人飛行器或大型運輸機來說更具應用價值,因此吸引了世界各大航空研發機構的重視。
混合電推進系統通過油動和電動組合在一起并發揮能源高效利用的復合動力系統。此系統的設計可以提升飛行器單種動力在寬工況下的效率,因而能夠大大提高飛行器的續航時間,進而滿足實際工作中長航時的需要,具有重要的現實意義。
現有技術條件下,油電混合電推進能量密度優勢明顯,在包含發動機、發電機、儲能電池等系統設計前提下,其能量密度約是純電池的3倍以上,且混合電推進工作時,燃油不斷消耗的情況下,混合電推進系統的綜合能量密度還會進一步的提高,而電池的重量則不會隨著電量的減少而減少。電池能量密度如果可以提升到現有技術的3倍以上,在發動機、發電機效率無提升的情況下,純電動能量密度才有望與混合電推進匹敵。
受限于電池能量密度,純電推進飛行器的航時問題短時間無法實現本質上飛躍。而若能解決混合電推進系統的機械可靠性、穩定性以及優化其能源動態特性,提高其能量利用效率,混合電推進系統較純電池動力系統具有非常可觀的應用優勢,能夠顯著提高飛行器的綜合性能。美、英等國家均將分布式混合電推進系統視為有潛力在2030年后投入使用的、極有前景的航空動力解決方案,并正在組織飛機系統集成機構和動力研發機構積極開展探索和預研。
1 當前電動飛機類型
當前主要有2類飛行器采用電動機驅動,一類是采用電機螺旋槳驅動的固定翼飛機,如圖1所示,為美國安飛電動飛機公司在塞斯納337“天空大師”基礎上,采用電動機取代了機身后部的活塞發動機改裝的輕型固定翼飛機,于2019年6月完成首飛,目標是在2021年完成適航認證;另一類是可實現垂直起降的旋翼飛機,如圖2所示,為法國Aquinea公司和法國國家民用航空學院共同研發的Volta電動直升機,設計最大起飛重量520 kg,最長航時40 min,于2016年12月完成了首飛。

圖1 賽斯納固定翼電動飛機[10]Fig.1 Cessna fixed wing electric aircraft[10]

圖2 Volta電動直升機[10]Fig.2 Volta electric helicopter[10]
這2類電動飛機的用途都極為廣泛,特別是在當前考慮節能環保的通用航空時代。固定翼飛機主要用于滿足起飛重量大、航程遠的需求,直升機主要是用于垂直起降、實現空中懸停,但是起飛重量和飛行速度都不及固定翼飛機。綜合上述2款飛機的優點,設計一款可實現垂直起降的固定翼飛機,可極大促進通用航空技術的發展,發展分布式混合電推進系統技術則是實現這一目標的重要途徑。
2 分布式電推進飛行器的發展
電推進飛行器以發電機結合儲能裝置(蓄電池、燃料電池等)給電動機供電,驅動螺旋槳、涵道風扇或其他裝置產生飛行動力的新型飛行器。與現有飛機主要依靠燃油動力不同,通過對二次能源系統的優化,從飛機綠色環保、高效節能的理念出發,優化整個飛機動力系統的設計,極大地提高了飛機的環保性、舒適性、維修性和經濟性。在現有儲能電池技術發展的瓶頸階段,分布式混合電推進技術代表了先進飛機技術的發展方向。
在分布式電推進飛機的發展方面,小型固定翼飛機取得了一定的進展,以電動滑翔機/超輕型/輕型運動飛機產品為主,如圖3所示,其中有代表性的有2011年鉆石飛行器公司推出的DA36 e-Star、2012年空客公司推出的E-Fan等。
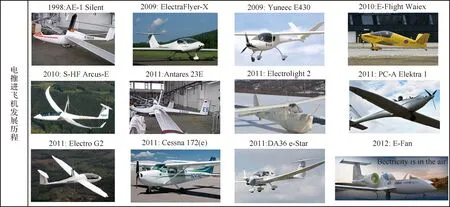
圖3 通用電推進飛機發展歷程[12]Fig.3 Development process of generalelectric propulsion aircraft[12]
近年來,在分布式電推進技術的工程應用方面,美國喬比航空公司已經對其全尺寸eVTOL--2座的S2進行了1年左右的試飛。喬比航空最初在2015年推出的2座級S2飛機采用了12個傾轉/折疊旋翼提供升力(部分旋翼在巡航階段可以折疊以降低阻力),如圖4所示,在機翼和尾翼梢部再增加4個推進槳提供推力。而最新推出的5座級S4采用了6傾轉旋翼。S4能夠單次充電飛行240 km,最大起飛重量為1 815 kg。

圖4 喬比航空公布的S2飛機[13]Fig.4 Joby Aviation S2 aircraft[13]
谷歌聯合創始人拉里·佩奇投資的Kitty Hawk公司開發了2座的Cora空中出租車。如圖5所示,Cora于2018年3月發布,該機采用12旋翼復合推進構型,最大速度約為180 km/h,航程約100 km,飛行高度為150~910 m,飛行時間約20 min。

圖5 Kitty Hawk公司Cora空中出租車[14]Fig.5 Kitty Hawk Cora sky taxi[14]
波音公司旗下極光科學公司開發了2座自主客運飛機(Personal Air Vehicle, PAV)。該公司在其位于弗吉尼亞州馬納薩斯的總部進行了全面的eVTOL測試。如圖6所示,該機由電推進系統提供動力,設計目標是具備從起飛到著該陸的全自主飛行能力,最大起飛重量800 kg,巡航速度180 km/h,航程80 km。2017年4月,完成1/4縮比驗證機首飛;2019年1月,完成全尺寸原型機首飛。其他代表性的機型還有美國NASA的X-57、GL-10、德國Songbird、CS-23等。

圖6 極光自主客運飛機首飛場景[15]Fig.6 Aurora flight sciences PAV first flight[15]
當前,中國在商用分布式電推進飛機研發方面出現了一些成果。深圳億航公司研發的億航184/216單/雙座多旋翼載人無人駕駛飛機也已經開始進行演示飛行,續航能力約半小時,最大載客量約117 kg。2019年7月,中國航空工業國際控股有限公司持有的大陸航空科技聯合美國佛羅里達州的VerdeGoAero Inc公司共同開發混合動力電動航空動力總成,近期計劃推出的IDEP TM混合動力系統,可用于最大起飛重量可達7 500磅(3 400 kg)的垂直起降(VTOL)飛機。
總體上看,中國電推進飛機研發力量相對薄弱、研發項目少、研究的系統性和深度不夠、以我為主的創新性研究較少,基本上還處于跟蹤研究階段。
3 分布式混合電推進飛機關鍵技術研究現狀
分布式混合電推進技術是未來航空發展的主流。綜合來看,需要從整體上處理設計問題,重點在于使全局系統中協同作用最大化,協同作用是一種以跨學科的方式改善和優化運載系統的系統概念。分布式混合電推進系統的協同涵蓋:系統分布式布局技術;電能的產生/存儲,包括與機身的協同作用;電源管理和控制(包括執行和飛行控制系統)的協同集成;實用集成,即飛行工況與能源優化協同集成。基于系統協同的概念,相關研究人員和機構主要開展了以下幾個方面的研究。
3.1 推進系統分布式布局技術
分布式推進主要是為了獲得更高效率的推力系統,同時降低飛機的噪聲,使飛機具備短距離起降甚至垂直起降的能力。總的來說,分布式推進具有以下優勢:
1) 通過將發動機噴流填充到機身形成的尾跡流中,并且發動機能夠吸除較厚的邊界層流動,從而降低了燃料消耗。
2) 通過在大展弦比后緣布置的推力矢量噴管提供動力升力、邊界層控制以及圍繞機翼形成超級環流,從而確保短距離起降能力。
3) 通過給機身遮擋發動機使飛機對周圍的噪聲降低。
4) 通過冗余的推力系統提高安全性能。
5) 通過進氣道/噴管/機翼結構一體化設計,減小飛機推進系統安裝重量。
6) 通過推力矢量和推理差動,實現飛機俯仰、滾轉、偏航力矩,從而減少飛機的控制面。
7) 小而輕的發動機可以實現動力系統更高效的生產與更換。
針對分布式混合電推進系統設計,美國NASA的研究人員Kim等,通過渦輪軸發動機帶動高速發電機發電,為整機提供電能。設計了12臺小型電動馬達,根據機翼、機身的基線布局,采用進氣道/噴管/機翼結構一體化設計,形成分布式布局的推進系統,如圖7所示,該設計能夠有效減輕飛機的重量,降低了飛行噪聲,具備短程起降的能力,并在2014年推出了新的設計機型N3-X,是NASA下一步亞聲速電推進飛機的發展重點。
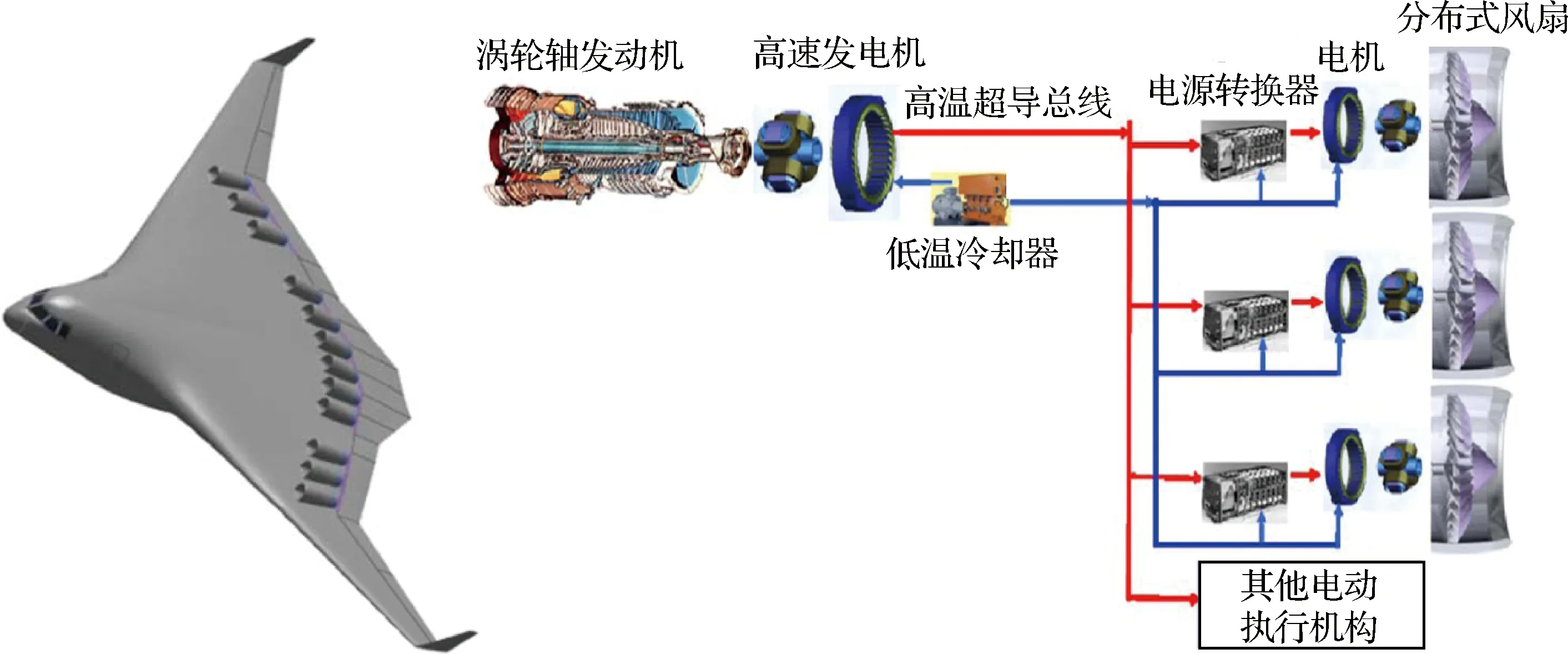
圖7 基于進氣道/噴管/機翼結構一體化設計的分布式混合電推進系統[19]Fig.7 Distributed hybrid electric propulsion system based on integrated design of inlet/nozzle/wing structure[19]
當混合電推進系統應用于分布式推進系統時,飛行器的動力學建模則成了必不可少的環節。2015年,NASA研究中心的Yoon等推出了一種計算大尺度多旋翼氣流的流體計算方法。該計算方法中,分離渦模擬湍流模型與三維非定常Navier-Stokes方程進行結合,用于模擬大尺寸四旋翼飛機,如圖8所示,已成功應用于XV-15等飛機的流場計算。Yoon等的多旋翼流場計算也可應用于固定翼分布式推進系統流場計算。
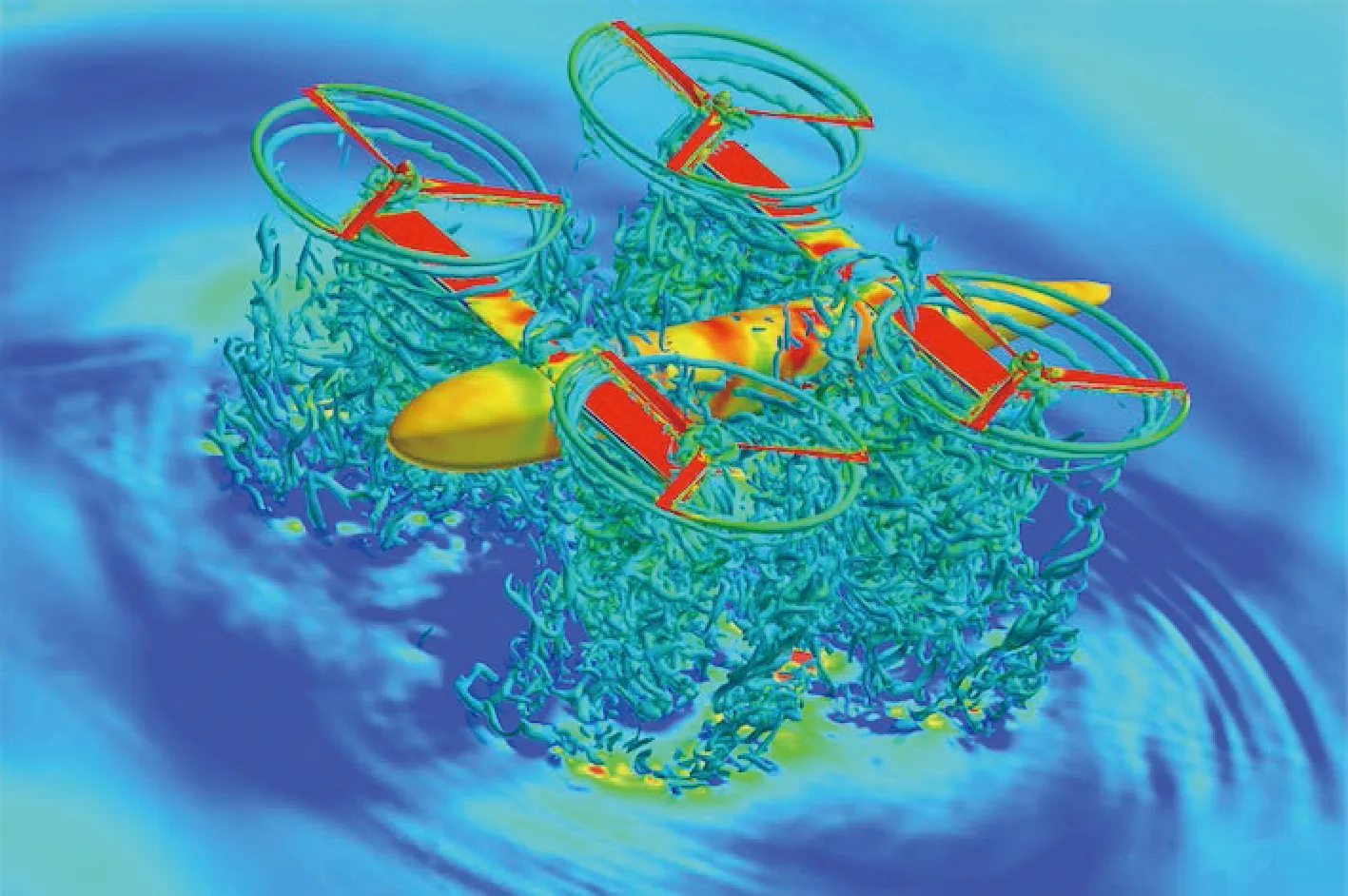
圖8 大尺度四旋翼飛機流場模擬[22]Fig.8 Flow simulation for a generic quad tilt-rotor in hover[22]
針對分布式電力驅動系統,Lei等提出了采用決定型評價的方法對系統設計進行優化,如圖9所示。應用單一優化模型和多級優化模型在永磁電機控制器的設計中,有效提高了系統的優化設計效率,特別是對于混合電推進系統這類高階優化問題,融合了多類離散和連續變量,采用Lei等的方法可獲取理想的優化設計模型。

圖9 復合模型優化框架[23]Fig.9 Optimization framework of compoundmodel[23]
德國宇航中心Diekmann和Hahn結合飛行器氣動數據和六自由度動力學仿真模型,如圖10所示,對推進系統分布式布置的飛行器短距離著陸過程的穩定性進行了仿真,當存在有某個推進器失效時,分布式布局的動力系統仍可實現穩定可靠飛行。
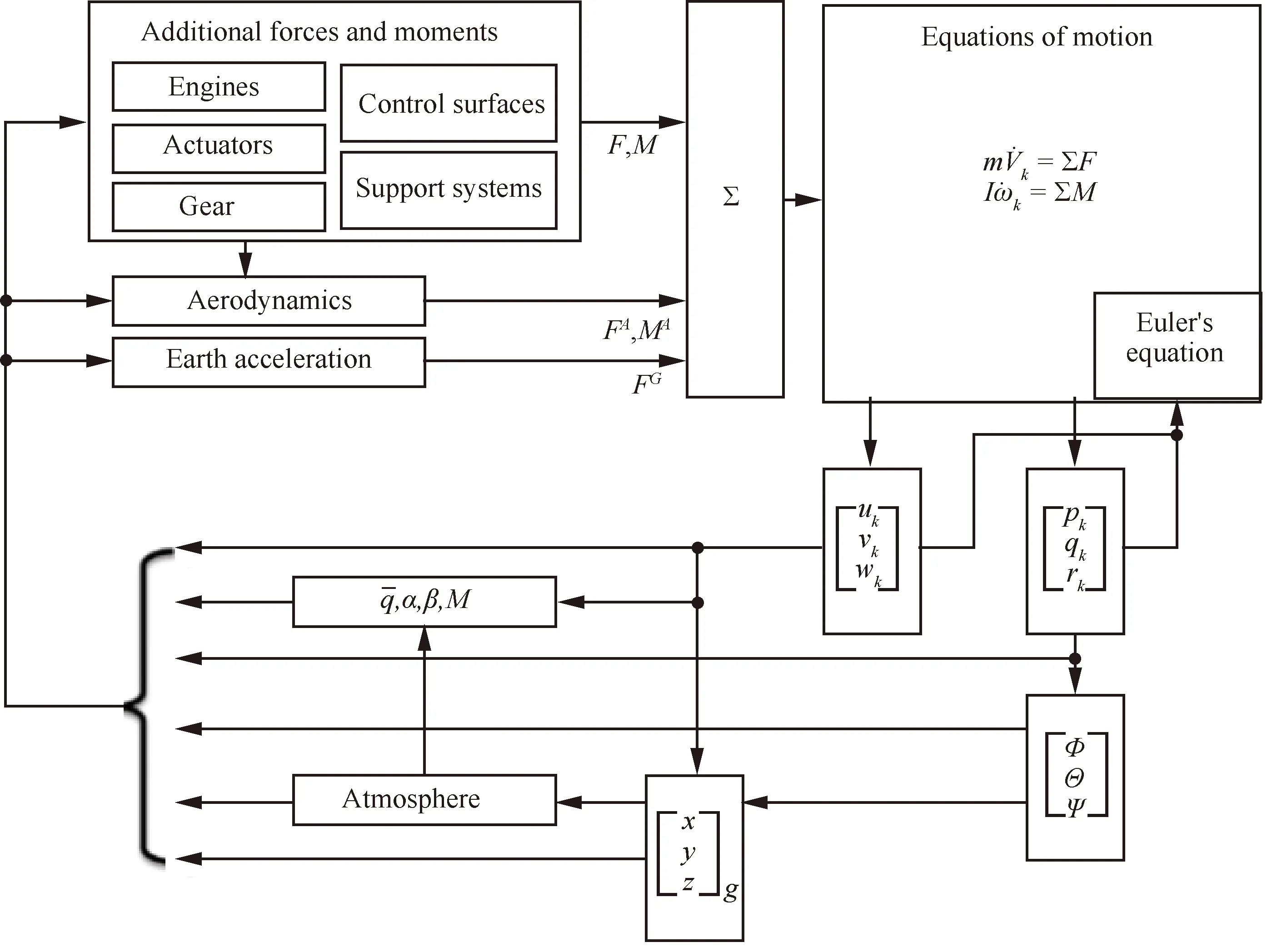
圖10 分布式推進動力學仿真模塊[24]Fig.10 Dynamic simulation module of distributed propulsion[24]
在混合電推進系統應用于通用飛機方面,國內毛鞠盛等在某型通用飛機的基礎上設計了一個油電混合電推進系統,使用MATLAB軟件編程分別對原型機和該混合電推進系統飛機的起飛距離、陸上行駛能量消耗、陸上行駛路程等性能進行模擬分析。結果表明,使用該動力系統的油電混合電推進飛機,在上述各項性能中均優于原型機,如圖11所示,混合電推進系統具有較好的節能性能。
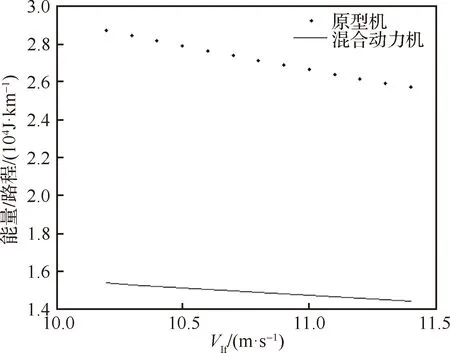
圖11 不同速度下能量消耗與路程的關系[25]Fig.11 Relationship between energy consumption and trajectory under different speeds[25]
3.2 混合電推進系統的選型設計
現有混合電推進系統技術按照動力聯接方式可分為2類:串聯式和并聯式,各聯接方式的原理如圖12所示。
2種聯接方式的主要區別是發動機是否與推進系統聯接。串聯式混合動力系統:發動機只為發電機提供機械能,為動力電池充電。電機驅動螺旋槳提供動力并控制飛行。利用油轉電的方式,能量的運行和管理較為靈活,適用于推進電機的分布式布局。
對于并聯式混合動力系統而言,發動機驅動主螺旋槳提供動力,電池輔助飛行,主要為機載用電設備供電。根據設計需求,系統可設計發電機將發動機一部分的機械能轉化為電能為電池充電,也可通過外接電源為電池充電。能源管理系統涉及燃油發動機和電池的雙重管理,系統設計復雜,能量利用效率較低。
根據不同的飛行器設計要求,可以選擇相應的混合電推進系統方案。混合電推進系統的選型方案涉及混合度比例的大小。
“混合電推進”本質上是指將電力與至少一個其他電源(通常為燃料動力電源)進行組合使用。假定以內燃機與儲能電池作為的動力電源組合,第1步是確定它們是串聯還是并聯組合。這種區別主要與分系統組成之間功率傳遞的性質有關:在串聯混合電推進裝置中,功率是用電傳遞,而在并聯混合電推進裝置中,它是機械傳遞。
在這樣一個復雜系統中,德國科學家Lorenz等采用功率混合度和能量混合度描述混合電推進系統組成。
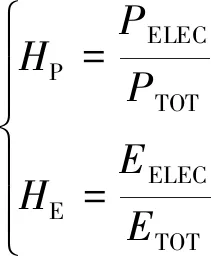
(1)
式中:對于混合電推進系統方案,為設計的最大(或有用)電功率;為系統的設計總功率;為存儲的總電能;為整個系統的總存儲能量。因此,根據動力系統組成,可以把現有動力系統分為:① 常規的基于燃油動力的燃氣輪機,=0、=0;② 純串聯混合電推進體系結構,依靠發動機提供電能供給推進裝置,多余電量僅用于過渡性存儲,=1、=0;③ 通 用純電動飛機,其能量存儲僅基于電池,=1、=1。
德國科學家Isikveren等在描述功率混合度和能量混合度時,通過建立基礎代數模型,將轉換為與供電功率比(表示能量載體的可用功率與總功率之比)相關的函數,則是與和活化率(表示動力系統的功率對隨時間的變化率)的函數,為并形成了Ragone曲線圖,如圖13所示,通過圖中所示可以看出混合電推進系統各功率單元對系統整體性能的影響。
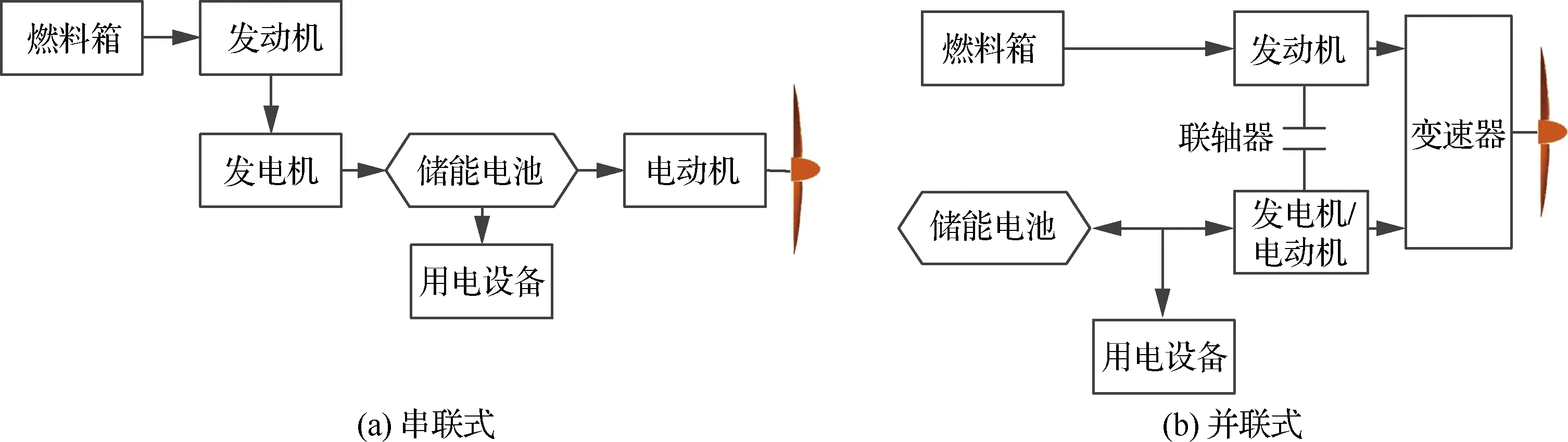
圖12 混合電推進系統2種模式Fig.12 Two modes of hybrid electric propulsion
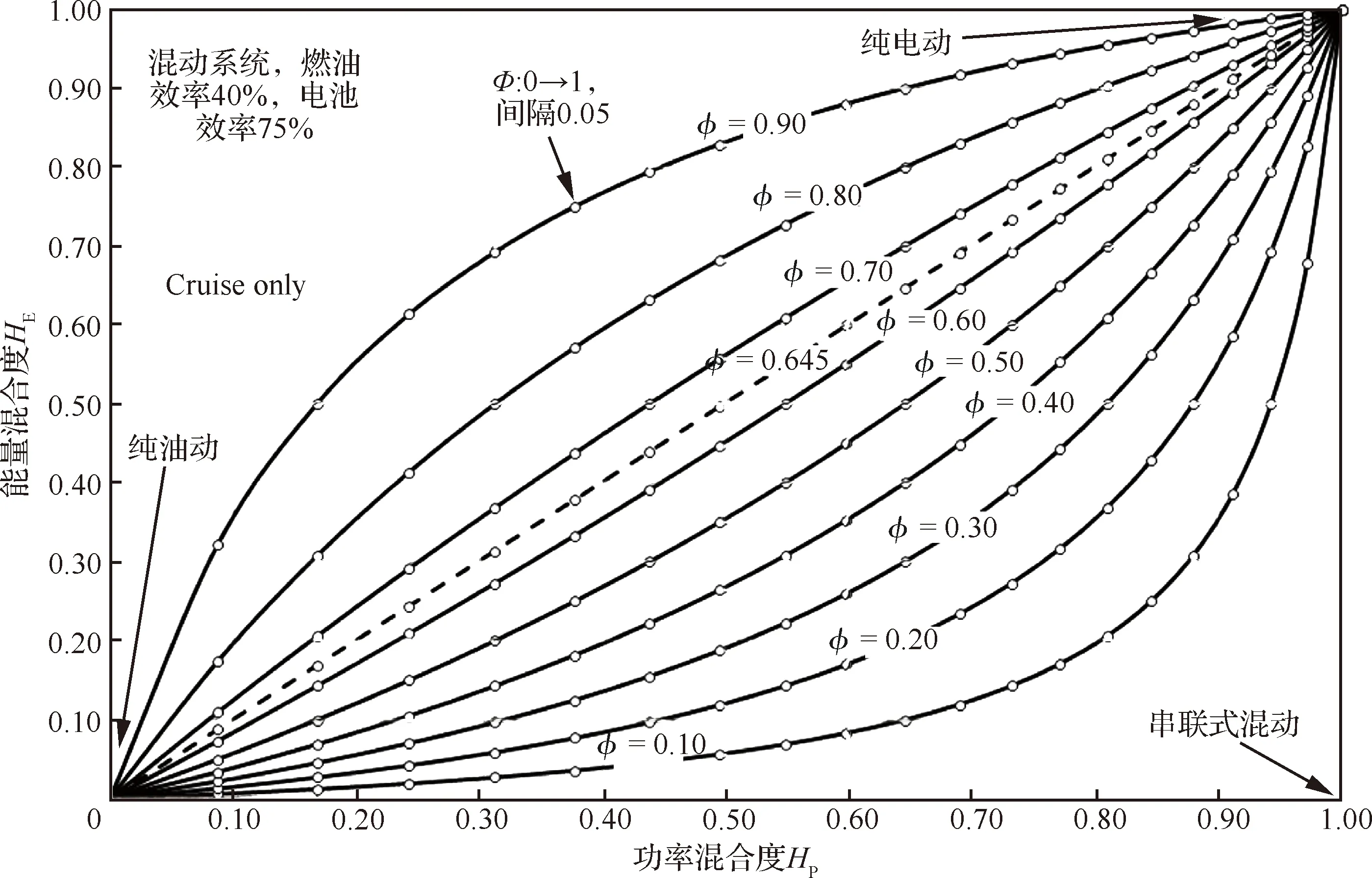
圖13 混動系統概念設計的Ragone曲線圖[28]Fig.13 Presentation of hybrid electric system conceptual design Ragone diagrams[28]
2015年,英國劍橋大學Friedrich和Robertson針對不同的起飛重量的飛機,包括20 kg~50 t級別的飛機,提出了混合電推進系統的拓撲設計方法,如圖14所示,以建模和仿真的手段,對飛機的混合電推進拓撲架構及尺寸進行了分析。結合4種不同拓撲架構的動力系統,對飛行器的航程與載荷重量關系進行了對比分析,如圖15所示。在4種拓撲架構中,純發動機為動力推進的航程最短;將發動機的機械能轉化為電能后,通過能量的優化調配,可延長航時;發動機和電機混合推進設計,對能量的利用效率則更高;發動機帶動發電機、結合儲能電池為的航程最長。在混合電推進系統的建模研究中,這類研究方法很有啟發作用。
2017年,荷蘭埃因霍芬理工大學的Silvas等提出了系統級的混合電推進設計與優化方法。針對串聯和并聯混合電推進系統設計,建立了對應的非線性優化分析模型,結合燃油的最優化利用模型,通過拓撲選擇、組件參數定型、控制器設計3個步驟,以系統拓撲分析的方法對混合電推進系統進行優化設計。其中拓撲設計的思路對混合電推進系統設計具有很好的參考作用。

圖14 Friedrich和Robertson提出的混合電推進系統的拓撲設計結構[29]Fig.14 Hybrid electric system topology design architecture proposed by Friedrich and Robertson[29]

圖15 不同拓撲結構動力系統的航程與載荷重量關系[29]Fig.15 Relationship between range and loading weight under different dynamic system topology architectures[29]
為更好地明確混合度對飛行性能和品質的影響,德國慕尼黑工業大學Pornet等將混合電推進飛行器與傳統動力飛行器進行了對比研究。通過設置飛行器爬升巡航過程的環境條件、飛行速度、飛行距離等,進行建模仿真,對比分析了混合電推進系統不同功率混合度與傳統動力系統的效能,如圖16所示,混合電推進系統的效能遠高于傳統動力系統。
這些研究成果對油電混合電推進系統聯接設計、電力功率配比研究有很好的參考作用。

圖16 混合電推進與傳統動力效能對比[30]Fig.16 Effectiveness analysis contrast between hybrid electric propulsion and traditional propulsion[30]
3.3 混合電推進系統建模與能源管理
在油電混合電推進系統建模研究方面,德國亞琛應用技術大學Finger等研究了串聯和并聯混電系統在傳統固定翼無人機西銳SR-22設計過程中的應用,認為與傳統動力系統相比,混合電推進系統下可應用于更高的功重比、更大的翼載荷的飛機。荷蘭代爾夫特大學的de Vrise等研究了不同的混電系統對于分布式推進固定翼飛機參數選擇的影響。英國劍橋大學Friedrich和Robertson則在不同指標體系下對混電系統在固定翼無人機上的應用效果進行了綜合評價,如圖17所示,其中P-IOL為發動機工作在理想狀態下的并聯式油電混動系統,S-SOC為串聯式油電混動系統電池供能比。
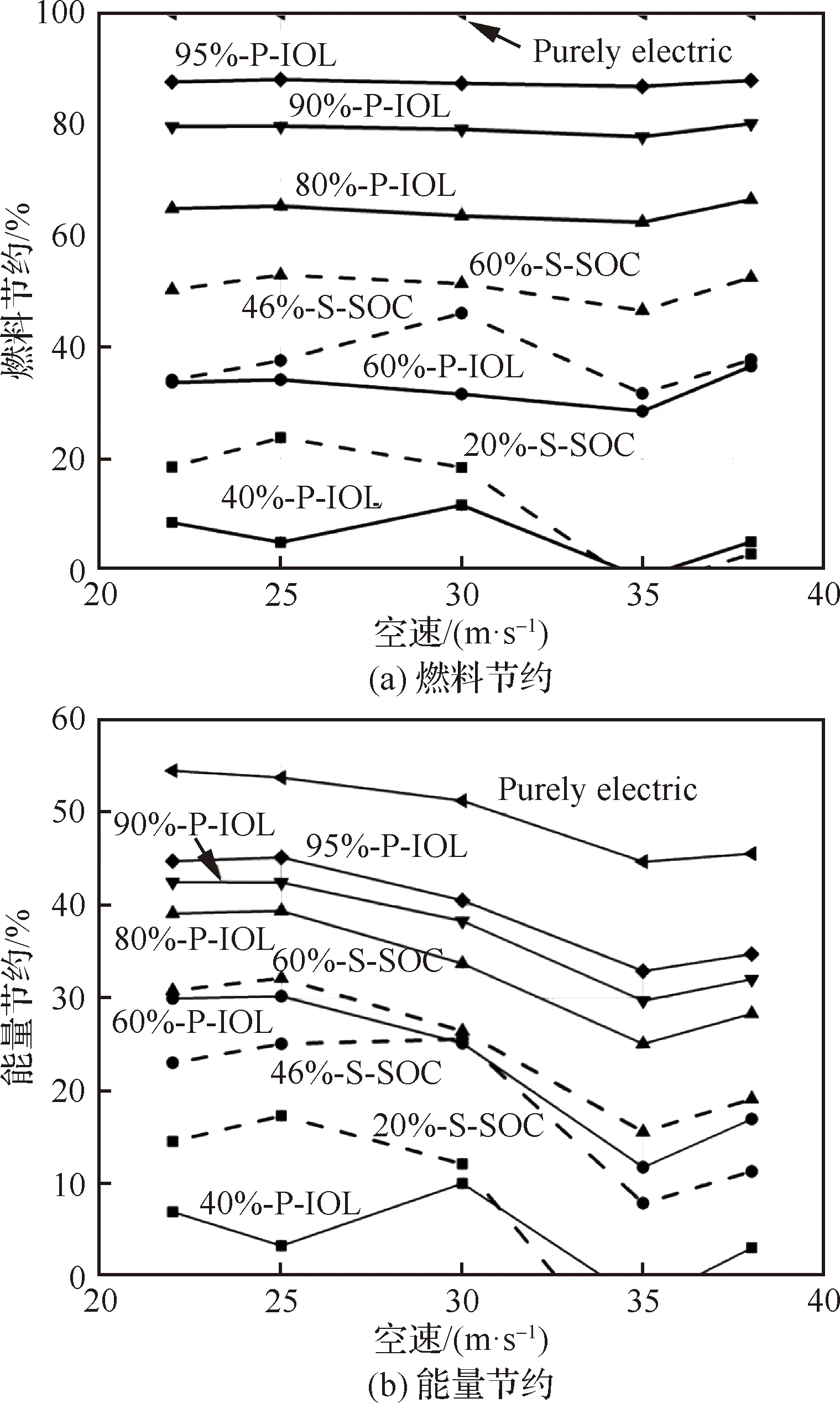
圖17 不同油電比例下的混合電推進系統效能對比[1]Fig.17 Hybrid electric propulsion effectiveness analysis contrast under different hybridizations[1]
結合混合電推進系統的動力學建模與控制,能源管理研究也取得了較多的研究成果。針對典型任務剖面,綜合考慮多能源供電系統,北京理工大學劉莉等提出了一種考慮全機重量能量耦合關系的總體設計方法和任務剖面驅動的能源管理策略,建立了能源系統模型,可根據不同任務剖面,合理配置多種能源系統的供電功率。其他類似的研究還有多能源系統模糊邏輯控制等。此類研究思路,可為本項目能源管理優化提供研究依據。
此外,澳大利亞悉尼大學Verstraete等以小型無人機為應用背景,采用燃料電池與鋰電池作為聯合供電系統。結合無人機在飛行過程中的動力學變化特征,通過建模仿真發現,鋰電池的充放電性能在混合電推進系統中起著關鍵作用,同時獲取了滿足需求的鋰電池充放電倍率及比功率等。類似的研究還有日本JAXA研究人員Nishizawa等的研究成果,也充分說明了儲能電池管理在混合電推進系統中的關鍵作用,如圖18所示,燃料電池與儲能電池組成的混合電推進系統可滿足大功率與大電流供能需求。
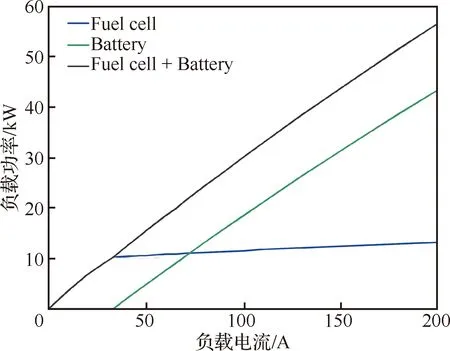
圖18 單能源系統與混合能源系統的供電特性[36]Fig.18 Power supply characteristics of simple and hybrid power systems[36]
混合電推進系統中,儲能電池起系統功率調節與補充的作用。電池的性能指標主要體現在能量密度和重量上。在德國慕尼黑工業大學Pornet等的研究中,基于2035窄體運輸機的研究計劃,分別設定燃料電池能量密度為0.75 kWh/kg、1.0 kWh/kg、1.5 kWh/kg,分析了飛行器在巡航過程中3種能量密度對燃料電池相對變化、飛機起飛重量的影響,如圖19所示(1海里=1.852 km),能量密度越高,飛機的性能越優越。

圖19 混合電推進系統中燃料電池對推進系統效率影響[30]Fig.19 Relative changes in block fuel and propulsion system[30]
總的來說,分布式混合電推進系統設計與能源管理研究取得了很大的成就,無論是系統設計、建模仿真,還是在工程實踐應用方面,都取得了很大的研究進展,對促進飛行器電氣化發展具有積極作用。然而,分布式混合電推進系統設計不僅需要實現當前飛行器電氣化的發展,更重要是為了實現全局系統中協同作用最大化,改善和優化運載系統的效率和能力。在總結當前科研人員的工作成果時,還有以下幾個重難點問題需求研究和解決。
首先,針對混合電推進能源系統能源變化特征,研究系統能源管理策略,結合當前多能源系統先進的控制策略,制定基于復雜系統優化控制的能源管理策略;在已建立的能源管理策略上,對混合電推進系統發動機最佳工作點及工作區間進行明確;然后,結合現有飛行工況數據,建立基于大數據驅動的最優能量分配預測模型,為混合電推進系統實現最優工況提供依據;最后,在現有能源系統與飛行器設計的基礎上,研制分布式混合電推進系統樣機,對所獲得的研究結論進行實驗驗證。
上述研究可為分布式混合電推進飛行器能源系統設計提供基本的設計思路和分析方法,同時,為分布式混合電推進飛行器能源系統優化管理提供理論支撐,對促進通用航空電動飛行器的發展將具有十分重要的意義。
4 分布式混合電推進飛機重難點問題及應對方法
分布式混合電推進系統的能源管理是一個由電子部件和機械部件組成的復雜系統,其中包含了多學科的交叉、先進的控制技術與控制方法等。分布式混合電推進的總體目標是實現飛行器垂直起降轉快速平飛、提高航程、減小排放量。為實現這些目標,必須對分布式混合電推進系統進行優化管理,包括系統主要的能量流、能量功率的可用性、發動機和發電機的動力學特性等,采用燃油發電-儲能電池能耗協同優化控制、多模式適應型實時功率優化控制、分布式混合電推進供電系統優化控制、大數據建模等技術,研制先進能源管理系統,為分布式混合電推進飛行器能源與動力提供技術支撐。
4.1 基于復雜系統優化控制的能源管理策略
能源管理技術是分布式混合電推進系統發展的關鍵因素。由于混合電推進系統的復雜性,采用準確的數學模型的傳統設計方法難以獲得預期的效果。模糊邏輯控制是基于模糊邏輯,模仿人類控制經驗和知識的一種智能控制,模糊集合的模型控制理論在當前工業領域十分活躍,運用模糊邏輯方法來設計混合電推進系統能源管理策略是可行并且有優勢的。
設定模糊邏輯的基本規則為:飛行過程中任意時刻的動力功率都可滿足;人為控制的動力輸入都可實現;儲能電池的荷電狀態始終維持在預設的區間;飛行過程中整個混合電推進系統效率最大化。
以油電混動系統的功率混合度(DOH)為模糊集合:

(2)
式中:為儲能電池功率變化(取值為正值時表示放電,取值為負時表示充電);為發動機提供的功率。當DOH取值為0時,則是只有單一能源供電;當DOH取值為1時,2種能源同時供電;當DOH取值小于0時,儲能電池處于充電狀態。能源管理的要求是使混和動力系統的DOH根據實際需求進行最優取值,可以設計智能模糊邏輯的管理策略進行系統的能源管理。在系統功率混合度的基礎上,設定分布式混合推進系統能源管理的模糊集合,如圖20所示,圖中、、、分別表示模糊集合,取值為0或1。
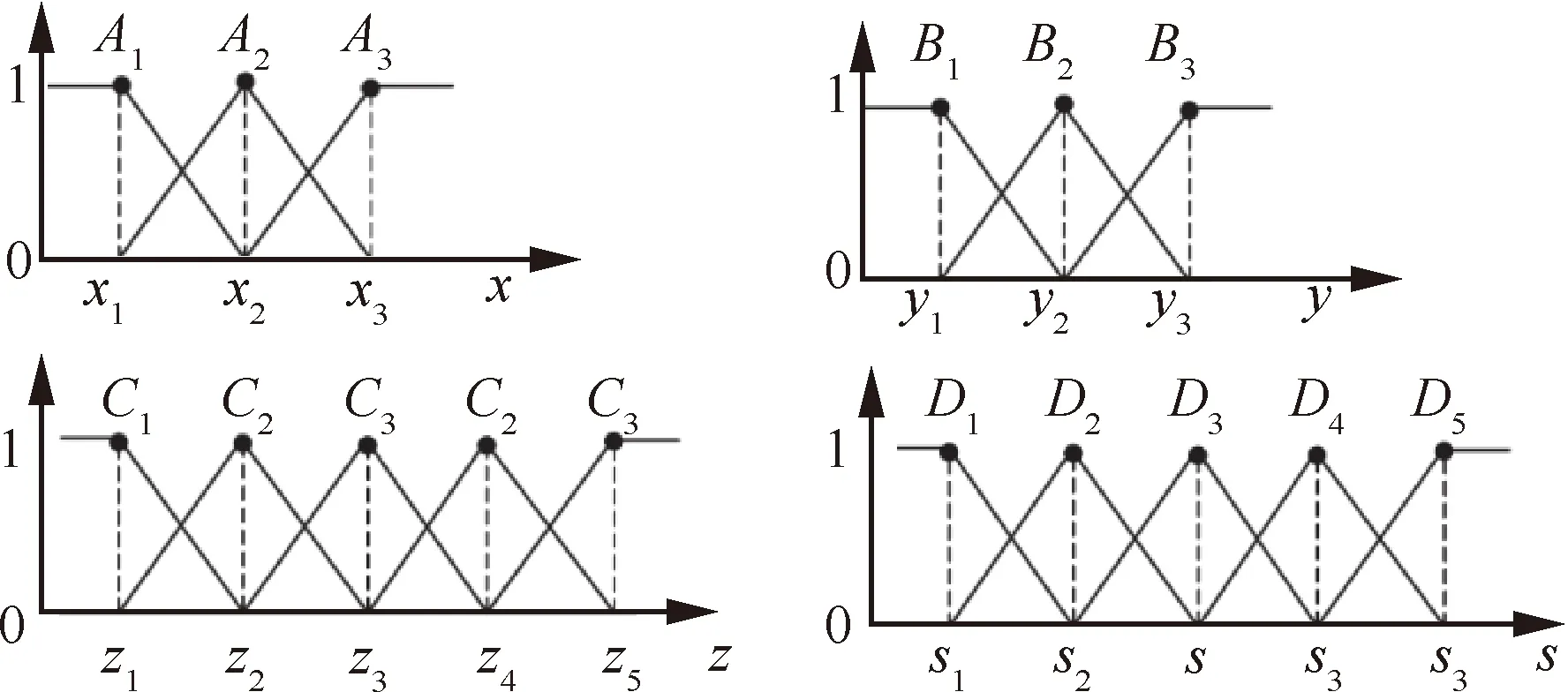
圖20 混合電推進系統能源管理的模糊集合Fig.20 Fuzzy sets of hybrid electric propulsion’s energy management
圖20中模糊邏輯計算公式為
(,,,)=()∧()∧
()∧()
(3)
式中:、、、為隸屬度函數;是荷電狀態;是飛行器速度;是飛行器需求功率;是電動機功率;,=1,2,3;,=1,2,3,4,5。
通過研究分布式混合電推進系統電網架構技術、電力電子技術、供配電系統故障檢測與識別技術、供電系統保護控制技術、復雜電路系統深度學習技術等,形成能源管理系統框架,如圖21所示,飛控系統對能源管理系統提出功率需求,通過模糊邏輯控制系統,對發動機、儲能電池的功率變化進行優化匹配,輸出最優功率混合度(DOH),滿足分布式混合電推進系統能源高效管理需求。

圖21 混動系統模糊控制原理Fig.21 Fuzzy control principle of hybrid electric system
基于模糊邏輯控制的混合電推進系統能源管理策略整體示意圖如圖22所示。首先運用模糊邏輯運算,根據飛行器的速度、需求功率以及儲能電池的荷電狀態,計算電動機的需求功率;然后,根據計算出的功率、發動機最優功率點、電池的荷電狀態,確定電動機和發動機分別需要的輸出功率;最終決定模塊通過模糊邏輯調整電池的輸出功率使發動機在預定的工作點運轉。
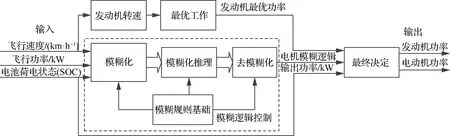
圖22 基于模糊邏輯的混合電推進系統能源管理控制策略[37]Fig.22 Hybrid electric propulsion’s energy management strategy based on fuzzy-logic[37]
發動機的工作狀態直接影響到混合電推進系統的燃油經濟性和飛行器的航程,因此,確定發動機的最佳工作點是十分有必要的。通過對發動機工況建模和實際功率需求,可以確定混合電推進系統的最佳工作點。
首先,將發動機最佳工作點的設置轉化為燃油消耗的優化問題。優化問題的模型表示為
OP∈{possible OP}
(4)
式中:OP對應發動機最優工作點,OP表示發動機工作點。
其次,設置2個目標函數、,分別定義如下:
=·fuel+·NO+·CO+·HC+
·PM
(5)
=·1+·2+…+·
(6)
式中:~是對應于燃油經濟性和排放相關重要性的權重系數;fuel是消耗的燃油;NO是氮氧化物;CO是一氧化碳;HC是碳氫化合物;PM是顆粒物;~是權重系數,對應于實際工況條件下發動機不同的功率等級;1是發動機工作在零功率輸出狀態下時目標函數的值,是發動機工作在級功率輸出時目標函數的值。
最后,明確最佳工作點的優化步驟,如圖23所示。先用局部優化算法尋找發動機每個特定工作功率級別下局部最優工作點,使目標函數最小;然后采用動態規劃方法使目標函數在實際工作約束條件下取值最小,即為全局最優工作點。
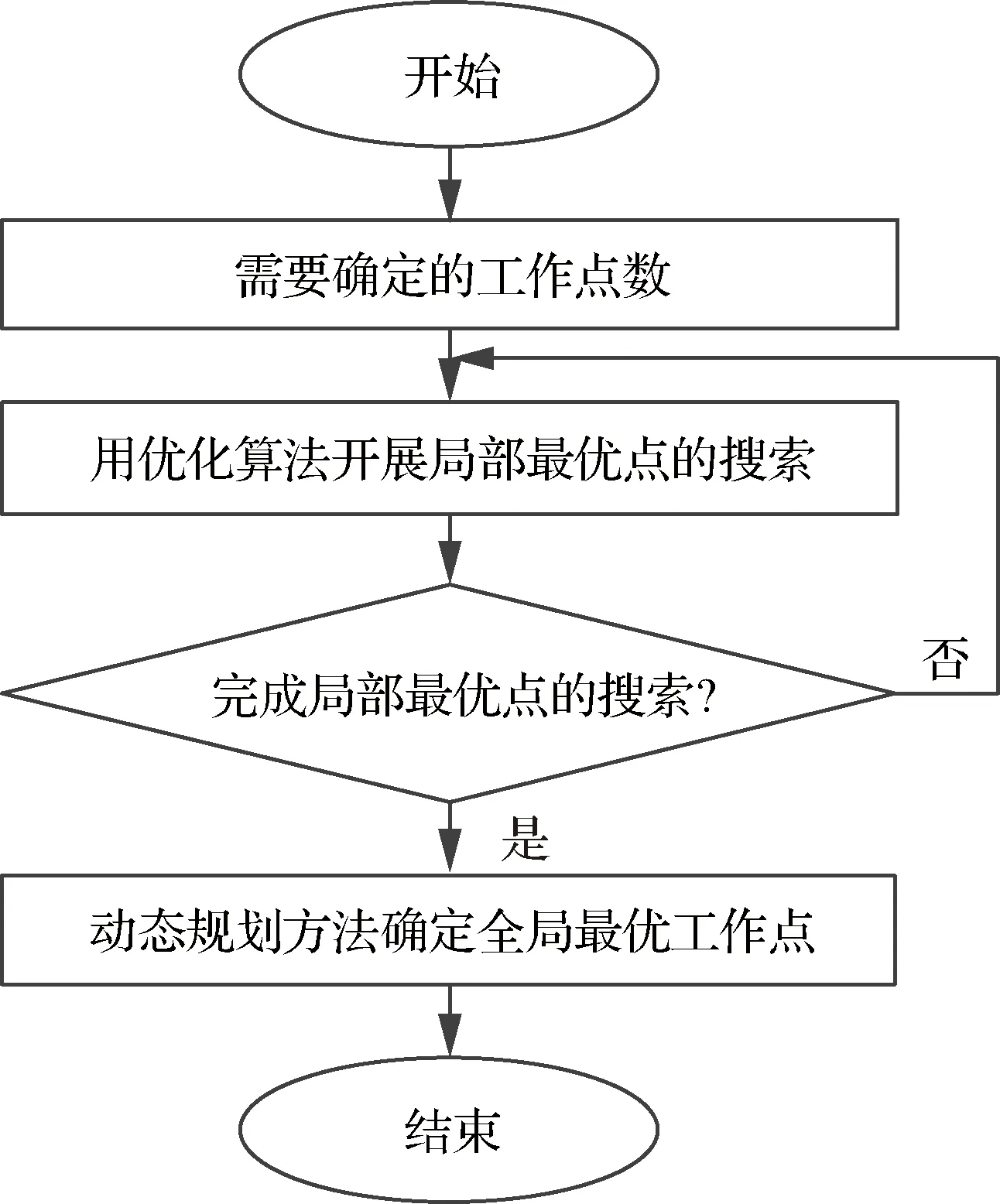
圖23 混合電推進系統發動機最優工作點搜索算法Fig.23 Optimization point searching algorithm for hybrid electric propulsion’s engine
4.2 基于歷史大數據驅動的最優能量分配預測
基于飛行歷史大數據的最優能量分配,首先需要對歷史大數據進行采集和優化。數據采集包括飛行過程中起飛、循環、降落過程中的動力系統的功率、能量變化情況,結合飛行環境數據、任務規劃、姿態變化、航跡等信息,對不同典型工況和背景,進行大量的運行數據的采集。通過對不同飛行工況條件下的飛行指令信號進行統計分析,計算各工況條件下的分布式動力的利用率;將各電動機的電流、電壓等信號值進行統計分析,將其轉換成功率分流值,作為后續動力系統參數優化的變量,用于動力系統的匹配建模。
引入在提高算法的局部與全局搜索能力與適應能力上具有良好的收斂性的模型自適應控制算法及帶精英策略的非支配排序遺傳算法對動力性、經濟性、約束目標等多目標函數進行優化求解。整個優化求解框架如圖24所示。
動力系統參數的多目標函數優化設計的目標是保證各分布式布局的動力系統功率供給的前提下提升燃油的經濟性。相應的數學模型為

(7)
式中:=(,, …,)表示維空間內的優化變量;()、()分別表示動力性目標及經濟性目標;()>0表示設計需求的、不犧牲系統動力性能的約束條件。
將大數據分析的結果代入動力功率損失函數和動力推進的匹配模型中,獲取評價動力性能與經濟性能的客觀條件,再以飛行器正常運行的最低需求、儲能電池和發動機可調功率范圍為主要約束條件,利用多目標函數優化算法進行優化設計,獲取Pareto解集,并從解集中獲取動力性能最優、燃油經濟性最低的解作為優化計算的最終解。針對多耦合參數和多沖突目標,選取系統關鍵參數作為設計變量,利用模型分析結果進行設計優化。
混合電推進系統能源管理策略不僅是對當前飛行條件下的功率最優分配,還應該是基于環境感知和任務規劃的能力最優分配。根據飛行器當前的飛行速度、動力需求、當前電池系統供配電條件、飛行環境和基于歷史大數據模型匹配輸出的未來飛行功率概況,運用模型參考自適應控制方法及帶精英策略的非支配排序遺傳算法等,對發動機和儲能電池進行最優功率分配,保證系統動力性能的前提下,使燃油經濟性最優。基于大數據驅動的模型自適應控制步驟如圖25所示。

圖24 考慮飛行歷史大數據模型匹配多目標優化模型圖Fig.24 Multi-objective optimization based on historical big data model matching

圖25 自適應控制流程Fig.25 Process of adaptive control
自適應控制過程中,參數自調整是基于模型輸出與實際輸出之間的誤差最小化,控制作用() 的范圍有邊界,通常它是模型輸出()、參考輸入()和系統輸出()的線性組合。參數模型中,利用歷史實飛大數據,提取特征參數,形成優化參照方案,結合混合電推進系統參數,在參數自調整過程中形成功率的最優分配控制指令。
在自適應控制過程中,運用帶精英策略的非支配排序遺傳算法對最優分配功率進行求解。其主要步驟為:首先,隨機產生規模為的初始種群,非支配排序后通過遺傳算法的選擇、交叉、變異3個基本操作得到第1代子代種群;其次,從第2代開始,將父代種群與子代種群合并,進行快速非支配排序,同時對每個非支配層中的個體進行擁擠度計算,根據非支配關系以及個體的擁擠度選取合適的個體組成新的父代種群;最后,通過遺傳算法的基本操作產生新的子代種群,依此類推,直到滿足程序結束的條件。
優化求解時,分別設定種群規模、最大迭代數、交叉概率、變異概率,同時設定基于精英策略模型的適應度函數,適度函數的微分方程組各個自變量在采樣過程中,參考值與計算值保持最小偏差。經過優化迭代計算后,獲取Pareto解集。根據目標需求,在保證系統動力性能的前提下,在儲能電池和發動機的可調功率范圍內,尋求燃油經濟性最優解值。
4.3 混合電推進分布式推進系統樣機設計
本文主要是論述基于混合電推進的垂直起降固定翼無人飛行器。為實現固定翼無人機的垂直起降,分布式推進系統設計中包含螺旋槳和旋翼,多槳翼布局決定了采用電機驅動的優越性。在目前鋰電池能量密度的水平下,對于起飛重量達噸級的較大無人機而言,在起飛過程中就會消耗掉儲能電池大部分的存電量,在后續的巡航飛行過程中,則會出現電量不足的現象。采用油轉電混合動力系統設計,即可滿足推進系統分布式布局的要求,也可使該類飛行器具有敏捷、航時長、節能、負載能力強等特點。對于十噸級以上的大型飛機而言,采用油電混合設計則可有效提升發動機的熱效率,對燃料的利用更加充分,同時也可滿足推進系統分布式布局的要求,但是目前應用于大飛機的兆瓦級電動機以及電子設備技術還處于研發階段,相關設計方案也還處于論證階段,后續需要加大技術力量投入。
針對混合電推進分布式推進飛行器,采用發電機和鋰電池串聯式混合電推進結構對飛行器供電的模式(見圖26)。系統主要包括:動力模塊(發動機、發電機、儲能鋰電池組),電子整流及電源管理一體化模塊。由發動機直接帶動發電機進行發電,發出來的電輸送給電動機或電池,然后由電動機通過傳動機構進行動力輸出。分布式推進系統設計中包含螺旋槳和旋翼,主要適用于固定翼無人機的垂直起降。

圖26 混合電推進系統功率傳遞路徑Fig.26 Power transfer path of hybrid electric propulsion system
對于分布式混合電推進飛行器設計而言,采用發動機與電池的功率混合度和能量混合度描述系統組成。結合Finger等的研究,主要是確定功重比()、翼載荷()等核心參數,在此基礎上,對動力系統的功率混合度進行明確,飛行器設計流程如圖27所示。輸入參數為初始最大起飛重量(MTOM)、其他頂層飛機設計要求,結合任務指標,通過優化、迭代,確定發動機功率、電池功率、推力大小等,最后在最大起飛重量的設計域內對飛機進行定型。
結合圖27中分布式混合電推進飛行器的設計細則和典型飛行器設計匹配原則,以飛行器的功重比()、翼載荷()為設計輸入,以巡航速度、爬升速度、起飛距離為調控變量,分析各點對應的功率。在串聯式油電混合系統設計中,選定任意功率點,結合功率混合度和能量混合度計算模型,可分析出發動機系統和電池系統各供能的比率,如圖28所示,作為系統設計的依據。
對并聯式混合電推進,也可采用類似的設計方法,通過調節發動機和電池輸出功率,獲取最佳能量輸出方案。并聯式混合電推進系統在機械連接上較為復雜,在應用于分布式動力推進布局時優勢不明顯。串聯式混合電推進系統綜合利用發動機的高能量密度和儲能電池的高功率密度,實現了飛行器的在復雜工況下的靈活應用。
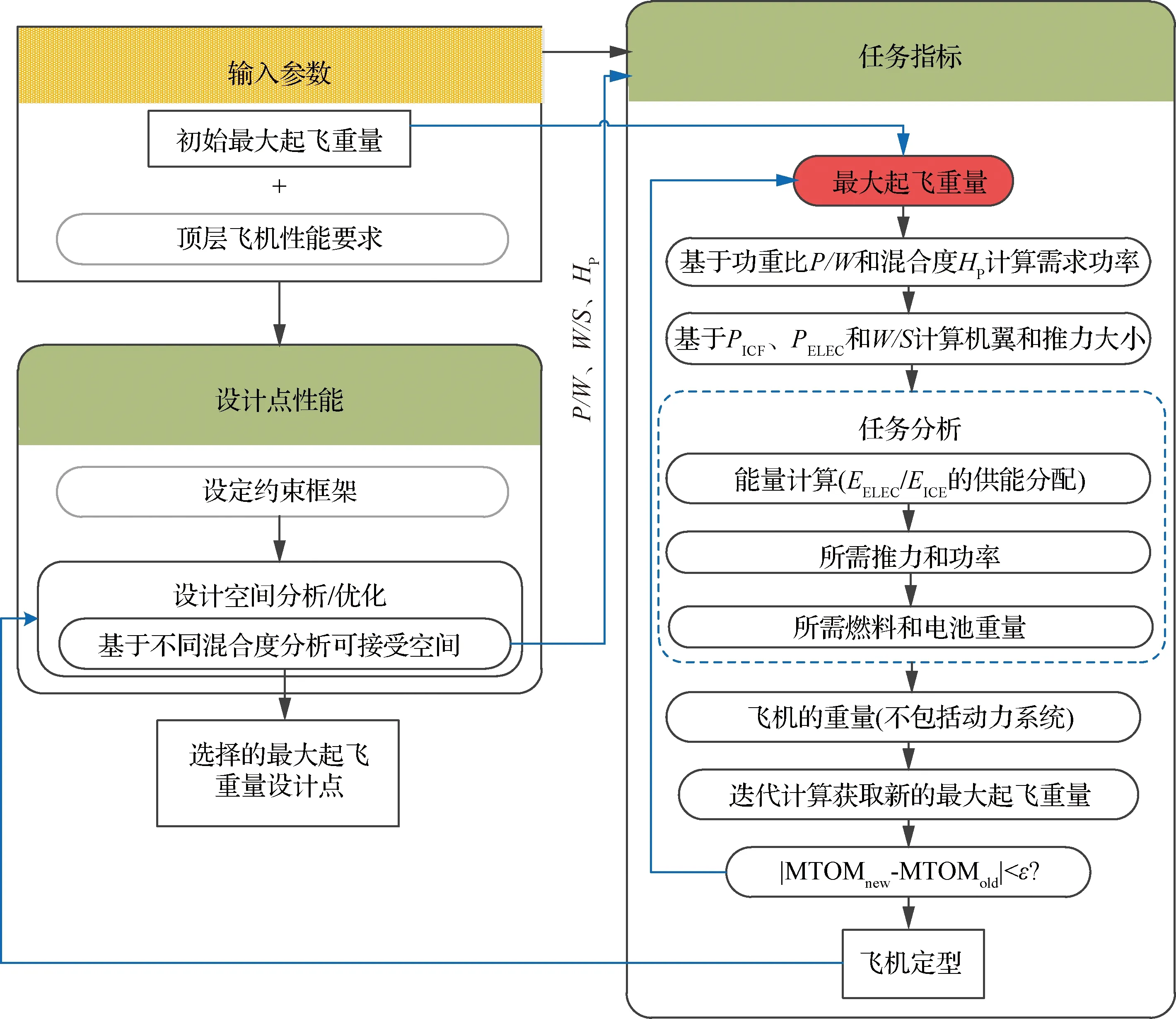
圖27 分布式混合電推進飛行器設計流程[31]Fig.27 Design flow of distributed hybrid electric propulsion aircraft[31]
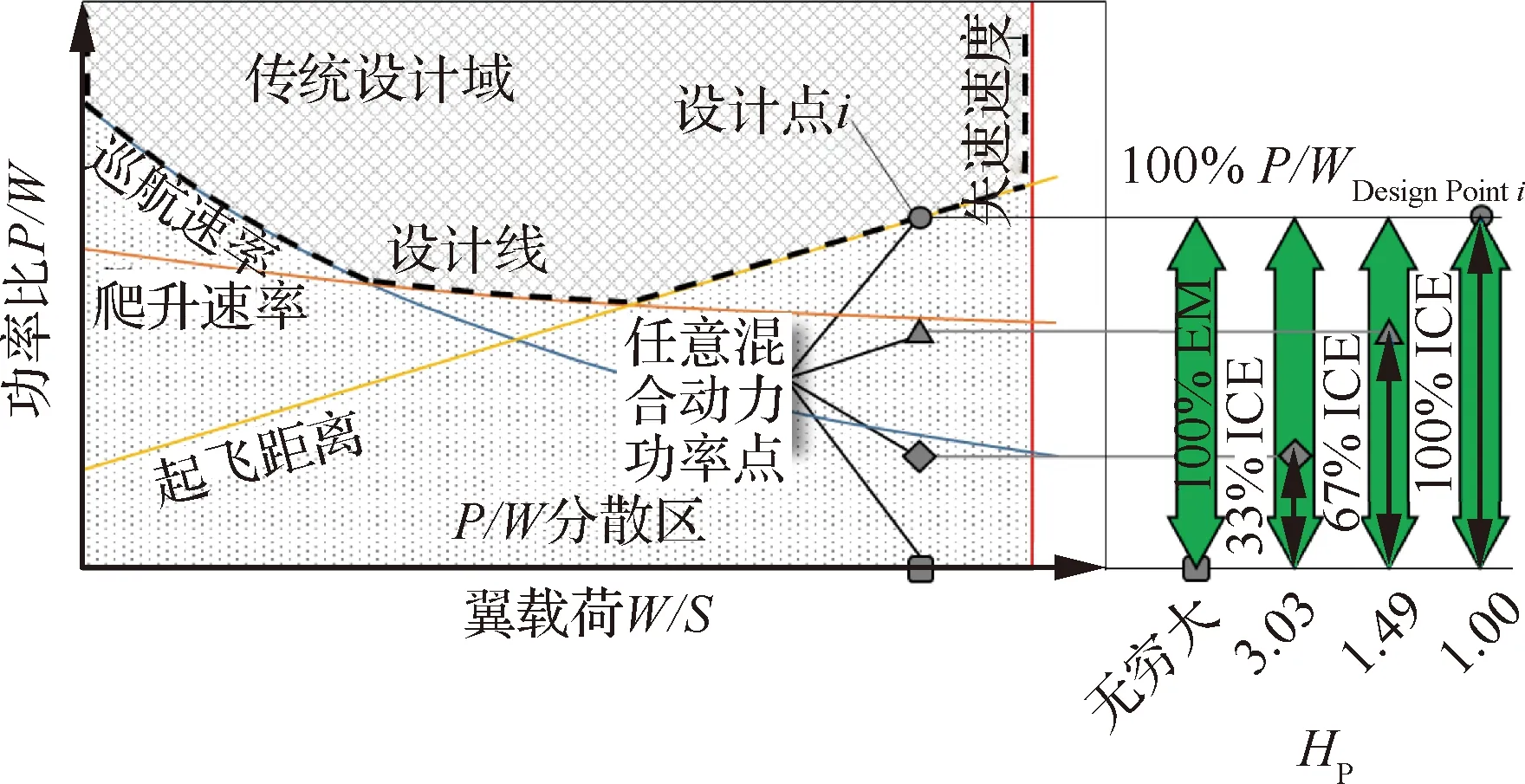
圖28 串聯式油電混合飛行器功率匹配設計圖[31]Fig.28 Power match design space of serial-hybrid aircraft[31]
5 結 論
當前分布式動力推進飛行器大多以純電池提供能量,受當前較低的電池能量密度限制,這類飛行器的續航能力往往非常有限。混合電推進技術通過對二次能源系統的優化,在提高能源的利用效率的基礎上,還可以滿足推進系統分布式布局的要求。利用油轉電的混合動力系統設計,分布式混合電推進飛行器融合了旋翼和固定翼的優勢,使該類飛行器具有較高的巡航效率、較快的飛行速度,以及非常敏捷的起降能力,從而可以應付較為復雜的應用場景,是近年來飛行器領域的研究熱點之一。
與純電動力系統相比,串聯式混電系統新增加了一個由發動機、發電機、能量管理系統組成的主動力單元,而電池僅作為輔助動力單元在高功率需求狀態下進行輔助供電。受益于燃油較高的儲能密度,串聯式混動系統的引入,大幅提升分布式動力推進飛行器的續航能力,而且不會引起起飛總重大幅度增加,但與此同時,其自身所引入的重量和能耗也可能對飛機設計產生較大影響。因此,必須對系統組成和能源管理進行優化設計。
在總結當前國內外分布式電推進飛行器研究現狀的基礎上,本文針對分布式混合電推進飛行器,開展了動力系統能量運行機理與動態規劃方法等方面的分析。結合所在團隊研究,分析了混電系統能源管理策略,主要是基于復雜系統優化控制的能源管理策略研究,主要是運用模糊邏輯方法來設計混合電推進系統能源管理策略;在前期獲取的飛行器飛行試驗工況數據的基礎上,建立基于飛行試驗大數據驅動的最優能量分配預測模型,分析混合電推進系統最優工況區間;在現有飛行器與能源系統設計的基礎上,采用發動機與電池的功率混合度和能量混合度描述系統組成,結合混合動力系統設置的工作模式,分析各模式下的功率需求,從而明確分布式混合電推進系統樣機設計域。相關研究內容重點是實現分布式混合電推進系統能源的高效、智能管理,為分布式混合電推進飛行器能源系統優化管理提供理論參考。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
環球時報(2022-05-30)2022-05-30 15:16:57
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
當代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
汽車與新動力(2015年1期)2015-02-27 12:11:01
