基于動態RCS特征相似的直升機靶機旋翼設計
2022-09-05 13:37:24費鐘陽蔣相聞招啟軍
航空學報 2022年7期
費鐘陽,蔣相聞,招啟軍
南京航空航天大學 直升機旋翼動力學國家級重點實驗室,南京 210016
現代戰場上,武裝直升機憑借其優良的低空作戰能力被廣泛使用,成為了戰場上具備強有力威脅的目標。能否實現精準打擊敵方的武裝直升機正逐步成為評價我軍防御系統作戰能力的重要因素,因此,為了精確評估我軍防御系統的作戰性能,需要在實戰演練環境中構建逼真的直升機靶機系統。雷達散射截面(Radar Cross Section, RCS)是衡量武裝直升機隱身性能的重要指標,很大程度上決定了武裝直升機的生存力和戰斗力,因此對雷達散射特性進行模擬是直升機靶機系統的設計重點之一。
武裝直升機種類繁多,它們的RCS特性各不相同。但考慮到工藝和經濟因素,不可能對應于每一款潛在威脅直升機目標均設計出一款靶機來模擬它。通常是基于某一小型直升機靶機,通過加載不同規格的龍伯透鏡或角反射器等無源干擾設備來增大靶機的整體RCS,達到對于不同直升機目標的雷達散射特性相似性設計效果。但這種構建方案主要是考慮了整機靜態的RCS幅值水平,當靶機尺寸較小時,它的旋翼特征與真實直升機目標的旋翼相差較多,旋翼的動態回波信號完全不同,會對雷達識別旋翼類飛行器產生干擾。在飛行過程中不停旋轉的旋翼具有獨特的動態RCS特性:Pouliguen等開展了旋翼的RCS時頻特性分析,獲得了常規狀態下旋翼雷達回波信號明顯的周期性規律;蒙志君等研究了旋翼時域和頻域RCS隨槳葉片數和轉速等因素的變化;陳行勇和蔣相聞等研究了旋翼參數對RCS的影響;Zhou等研究了共軸式旋翼的散射特性;李建周等給出了旋翼轉動時直升機雷達回波信號的時頻域譜,表明機身的微多普勒頻移主要集中于零頻附近,而旋翼旋轉引起的周期性微多普勒頻移較大。因此,為了讓靶機模擬出逼近目標直升機的動態RCS特性,需綜合考慮不同旋翼時域和頻域特征的相似性,但在目前實際的靶機系統構建工作中,對旋翼動態雷達回波信號的提取與分析難度較大,對旋翼的動態散射特征相似性設計的研究也相對較少。
鑒于此,本文首先建立了結合物理光學法和等效電磁流法的RCS高頻預估方法,并聯合短時傅里葉變換,提取出動態旋翼的雷達回波信號。然后研究了旋翼參數對其動態RCS特性的影響,選取出轉速、半徑、槳葉片數和翼型厚度作為設計參數,推導得到不同旋翼雷達最大微多普勒頻移的相似條件,以時間推進的方式計算了不同翼型配置旋翼的動態RCS,找到使靶機旋翼RCS強度能夠與目標旋翼匹配的翼型。最后,綜合對比不同設計方案旋翼的時域和頻域特征,提出擇優方案,完成靶機旋翼到目標旋翼動態RCS的相似性設計。
1 旋翼RCS分析方法
1.1 RCS高頻預估方法
在電磁散射求解的問題中,常使用數值分析和高頻預估方法,隨著研究深入,多種高效高精度混合算法也被提出。但高頻預估方法憑借其求解電大尺寸目標問題速度快、精度足以指導工程實踐等優點,依然得到廣泛應用。本節將聯合使用高頻預估方法中的物理光學法和等效電磁流法,開展對直升機旋翼雷達特性的計算分析。
1.1.1 物理光學法
物理光學法基于Stratton-Chu積分公式,將散射體等效為散射體表面的感應電流,求解出物體表面外任一觀察點的散射電場()為


(1)
式中:表示散射體表面積;和分別表示散射體表面處的總電場和總磁場;為磁導率;為散射體表面的單位法矢;為自由空間格林函數;為角頻率。
對式(1)的積分方程通過近似條件進行簡化,再將目標表面離散成許多曲面微元,把微元的散射場積分疊加即可得到目標表面在遠處任一觀察點的散射電場:

(2)
式中:為波數;為目標到雷達天線的距離;為坐標軸矢量;為入射電場。這樣通過曲面積分疊加,即可求出整個目標表面的散射場。
1.1.2 等效電磁流法
物理光學法未能考慮邊緣繞射,需要引入等效電磁流法進行修正。等效電磁流法假設在目標表面奇異處(如尖劈)的邊緣回路存在線電流和線磁流,對其進行遠場輻射積分求得繞射場:

(3)
式中:d為邊緣微元回路;為波阻抗;為繞射射線傳播方向的單位法矢;為沿邊緣回路方向的單位矢量;為邊緣的位置法矢。
從繞射場公式中剔除物理光學場的貢獻,可以求得后向散射繞射場為


(4)

1.1.3 旋翼總散射場的計算
通過物理光學法計算旋翼面元散射場(),等效電磁流法計算旋翼邊緣繞射場,將二者矢量疊加可求得旋翼的總散射電場:
=()+
(5)
1.1.4 算例驗證
為了驗證本節建立的旋翼RCS高頻近似求解方法的有效性,選用有RCS參考值的NACA0012翼型平直槳葉作為算例。計算條件為:雷達波頻率5 GHz,垂直極化。從圖1可以看出計算值和參考值吻合度較高,說明此高頻方法能有效模擬復雜外形目標的RCS,可以用于旋翼雷達目標特性的計算和分析。
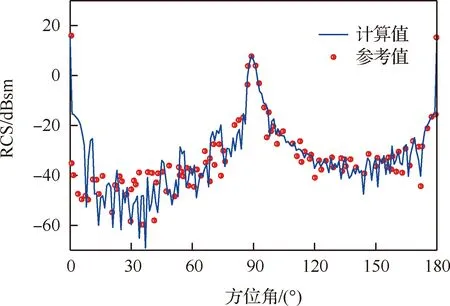
圖1 RCS本文計算值與參考值[25]對比Fig.1 RCS comparisons of present results with reference results[25]
1.2 RCS時頻分析方法
時頻分析方法基于短時傅里葉變換,將連續時間離散后在不同的時間點對高頻預估方法計算得到的回波信號作傅里葉變換得到瞬態頻域分布,再依靠時間窗的滑動得到二維的時間-頻率密度分布,表征出動態旋翼的RCS時頻特性。本文選用Hamming窗開展旋翼RCS的時頻信號提取。針對有時頻信號測試結果的旋翼,半徑0.49 m,包含2片槳葉,在10 GHz、水平極化雷達波照射下,時頻信號曲線的測試結果和計算結果如圖2所示。可以看出計算結果與試驗測試結果基本吻合(雷達最大微多普勒頻移大小及出現的時間相同),驗證了本文建立的旋翼雷達回波信號時頻分析方法的有效性。
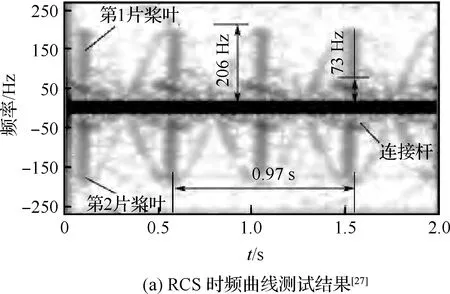

圖2 本文與文獻[27]RCS時頻曲線結果對比Fig.2 Comparison of RCS time-frequency curves of present result with those of Ref.[27] result
2 旋翼參數對RCS時頻特性的影響
旋翼RCS的時頻域譜揭示了在各個時刻不同頻率的旋翼雷達回波信號的能量密度分布。時頻域譜中的微多普勒特征包含了旋翼的轉速、半徑和槳葉片數等信息,灰度的亮暗則與旋翼的動態RCS強度有關,這由旋翼的散射特性決定,因此,時頻域譜能夠充分反映旋翼旋轉過程的動態RCS特性。為此,本節將基于表1中的4副旋翼,開展靶機旋翼參數對RCS時頻特性的影響研究。
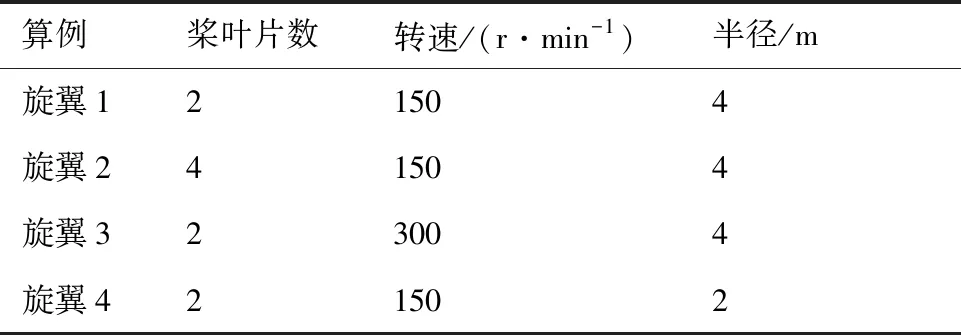
表1 不同參數的旋翼Table 1 Rotors with different parameters
2.1 旋翼RCS時頻域譜特征
由旋翼旋轉引起雷達最大多普勒頻移為
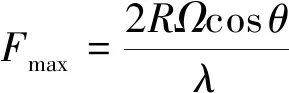
(6)
式中:為旋翼半徑;為旋翼轉速;為雷達波入射方向與槳盤平面夾角;為波長。
圖3展示了旋翼1在雷達波頻率為10 GHz、垂直極化條件下,一個旋轉周期內的RCS時頻域譜,它的雷達最大微多普勒頻移為4 188.79 Hz。
圖3中白色實線線框表示的是雷達最大微多普勒頻移閃爍帶(“雷達最大微多普勒頻移閃爍帶”在后文中均簡稱為“閃爍帶”),閃爍帶對應的橫軸頻率即為雷達最大微多普勒頻移,當槳葉前緣或后緣旋轉至垂直于雷達波的入射方向時會產生較強的散射回波(如圖4所示),時頻域譜上出現閃爍帶,迎著雷達波運動的槳葉產生正頻率的閃爍帶,背對雷達波運動的槳葉產生負頻率的閃爍帶;圖3中黃色虛線框內標識了某些閃爍點的位置,這些閃爍點是當雷達波垂直照射到槳尖端面時產生的強散射源表征,主要集中于零頻附近。

圖3 旋翼1的時頻域譜Fig.3 Time-frequency spectrum of Rotor 1
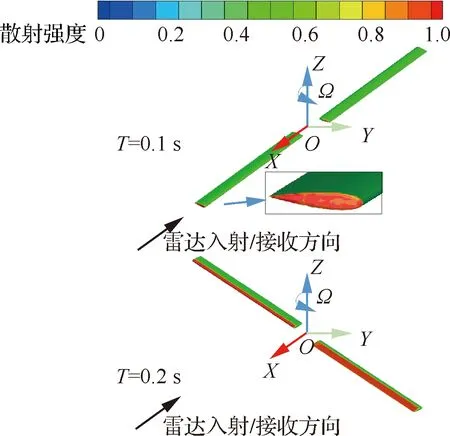
圖4 閃爍帶與閃爍點成因Fig.4 Causes of scintillation bands and scintillation points
2.2 旋翼基本參數的影響
2.2.1 漿葉片數
為了研究槳葉片數對雷達最大微多普勒頻移的影響,通過時頻分析方法得到旋翼2在10 GHz、垂直極化雷達波照射下的RCS時頻域譜,如圖5所示。由圖可以看到,旋翼2的雷達最大微多普勒頻移=4 188.79 Hz,與旋翼1一致,但在一個旋轉周期0.4 s內產生了4次閃爍帶。當只有旋翼槳葉片數發生改變時,槳葉的分布會變得稀疏或緊密,會導致相同時間內出現閃爍帶的次數發生變化,槳葉片數增加則閃爍帶次數增加。
為了研究槳葉片數對旋翼RCS強度的影響,基于轉速和半徑相同的3副平直槳葉旋翼,槳葉片數分別為2、4和6片,在相同條件下計算它們在水平面內的RCS分布,如圖6所示。旋翼的RCS幅值在水平面的大部分角域都維持在較低水平,當雷達波垂直入射到槳葉前緣(即2片槳葉旋翼的×180°方位、4片槳葉旋翼的×90°方位、6片槳葉旋翼的×60°方位,=0,1,2,…)時將產生強烈的散射回波,這些方位角附近會存在RCS極大值,當槳葉為偶數片時,水平面內RCS極大值的個數等于旋翼槳葉片數。

圖5 旋翼2的時頻域譜Fig.5 Time-frequency spectrum of Rotor 2

圖6 不同槳葉片數旋翼RCS分布對比Fig.6 Comparison of RCS distribution of rotors with different blade numbers
2.2.2 旋翼半徑
為了研究旋翼半徑對雷達最大微多普勒頻移的影響,在相同計算條件下得到旋翼4在一個旋轉周期內的時頻域譜(見圖7):旋翼4的雷達最大微多普勒頻移=2 094.40 Hz,出現了2次閃爍帶。當只有旋翼半徑改變時,僅會導致雷達最大微多普勒頻移發生變化,半徑越小,頻移越小。

圖7 旋翼4的時頻曲線Fig.7 Time-frequency spectrum of Rotor 4
為了研究旋翼半徑對RCS強度的影響,在相同條件下,計算3副半徑不同的2片槳葉旋翼的水平面RCS均值,從圖8可以看出,隨著旋翼半徑的減小,槳葉前緣鏡面散射被削弱,RCS均值逐漸降低。
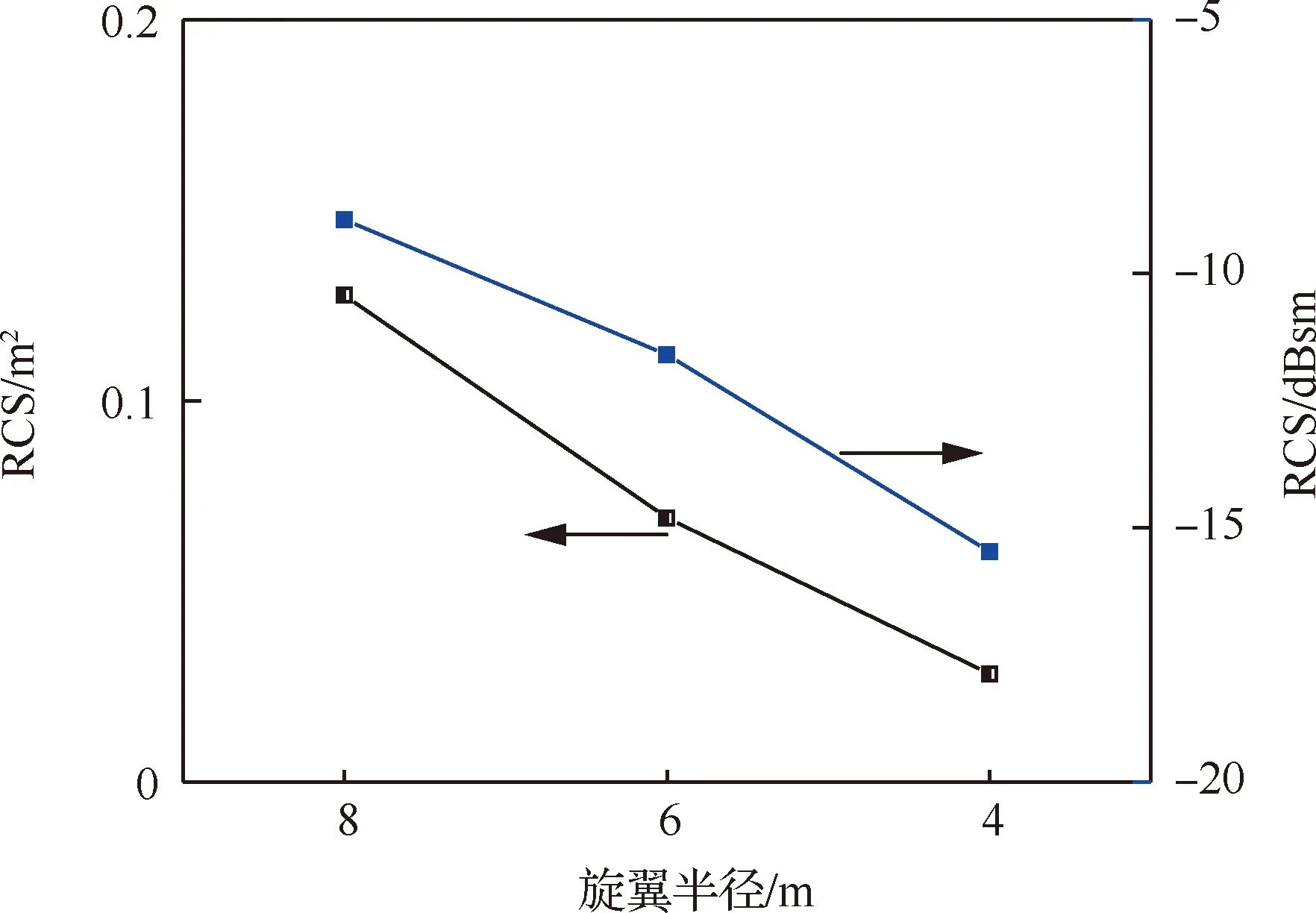
圖8 不同半徑旋翼RCS均值對比Fig.8 Comparison of RCS mean values of rotors with different radius
2.3 旋翼翼型參數的影響
圖9分別給出了旋翼1采用NACA0012、NACA0014、NACA0016、NACA0018和NACA0020這5種不同厚度翼型以及NACA1412、NACA2412、NACA3412、NACA4412和NACA5412這5種不同最大彎度翼型的RCS均值對比。可以看出:隨著翼型厚度的增加,旋翼1的RCS均值不斷增大;翼型彎度的增加會使RCS均值在小范圍內上下波動,但變化幅度遠小于翼型厚度改變帶來的影響。因此,相比于翼型彎度,翼型厚度的改變更能主導旋翼RCS的變化,對靶機旋翼翼型厚度的設計是RCS強度相似性設計中重要的一環。
由于旋翼的微多普勒特征主要由旋翼的基本參數和雷達波入射角度決定,翼型的不同只對RCS強度產生較明顯的影響。因此,進行雷達最大微多普勒頻移相似性設計時不考慮翼型的影響。
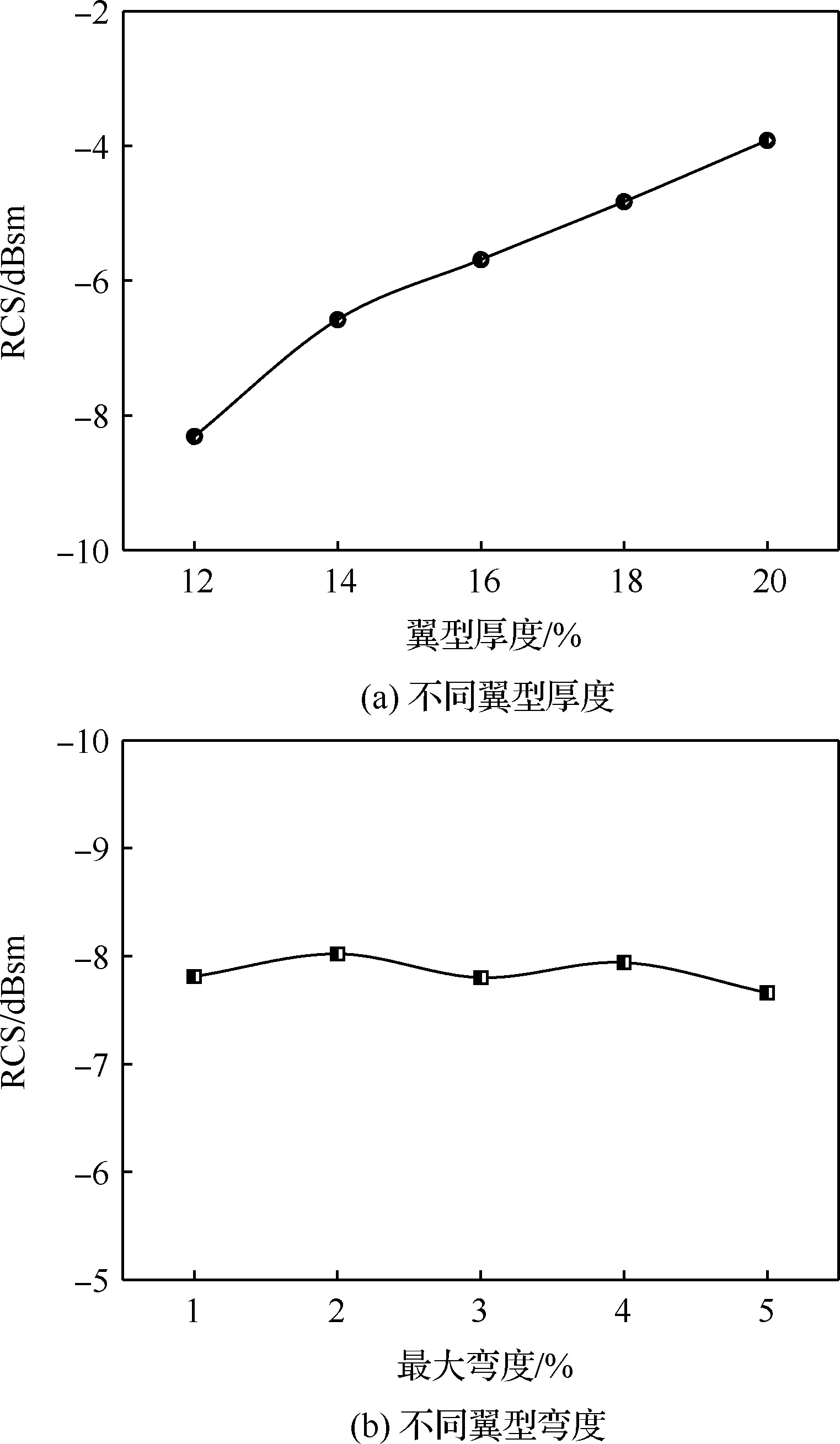
圖9 翼型參數對旋翼1的RCS特性影響Fig.9 Effect of airfoil parameters on RCS characteristics of Rotor 1
2.4 旋翼運動參數的影響
2.4.1 旋翼轉速
為了研究旋翼轉速對雷達最大微多普勒頻移的影響,計算得到旋翼3在0.4 s內的時頻域譜(見圖10):旋翼3的雷達最大微多普勒頻移=8 377.58 Hz,出現了4次閃爍帶。
根據式(6),雷達最大微多普勒頻移與轉速成正相關,當只有旋翼轉速改變時,雷達最大微多普勒頻移會發生變化;同時,旋翼轉速變化會改變槳葉前、后緣在相同時間內垂直于雷達波入射方向的機會,轉速越快,相同時間內出現閃爍帶的次數越多。
為了研究旋翼轉速對RCS強度的影響,在相同條件下,計算同一副2片槳葉旋翼在1、2和3(表示某轉速數值)這3個轉速時的時域RCS,如圖11所示。雷達照射持續時間為(轉速為1旋翼的旋轉周期),RCS采樣間隔時間為/360。可以看出,由于旋翼轉速的提高,在相同時間內某片槳葉前緣垂直于入射波的狀態增加,因此RCS極大值區域依次出現的時間間隔變短,相同時間內轉速越高的旋翼時域RCS極大值區域越多。

圖10 旋翼3的時頻域譜Fig.10 Time-frequency spectrum of Rotor 3


圖11 不同轉速旋翼時域RCS分布對比Fig.11 Comparison of RCS distribution in time domain of rotors at different rotational speed
2.4.2 槳葉揮舞運動
揮舞運動是旋翼動態運動中重要的組成部分,本節將研究揮舞運動對旋翼動態散射特性的影響。
槳葉的揮舞角主要由錐度角、后倒角和側倒角共同決定,通常情況下這3個角度分量均比較小。圖12給出了旋翼1在不同的錐度角、后倒角和側倒角狀態下的RCS均值對比。可以看出,側倒角從3°變到6°再至9°,RCS均值幾乎不變,錐度角和后倒角的增加使RCS的均值呈下降趨勢,但引起的變化量在-18 dB以內。因此,相較于其他的旋翼參數,揮舞角分量對RCS強度的影響較小。

圖12 揮舞角分量對RCS均值的影響Fig.12 Effect of flap angle components on RCS mean value
圖13是錐度角、后倒角和側倒角均分別為9°時的RCS時頻域譜,雷達波從旋翼頭向入射。從圖中可以看出3種情況下的雷達最大微多普勒頻率基本一致,但存在細微差別,具體的頻率數值為:錐度角或后倒角為9°時=4 13722 Hz,側倒角為9°時=4 18879 Hz,頻率差在1%左右。這是由于揮舞角分量在多數情況下較小,只能對雷達波至旋翼的入射方向產生較弱的影響。
以上研究了揮舞角分量對旋翼散射特性的影響,再分別計算在頭向固定方位的雷達波照射下,旋翼1以3種揮舞角分布狀態旋轉一周的動態RCS,得到它們的RCS均值如表2所示,其中為槳葉方位角。
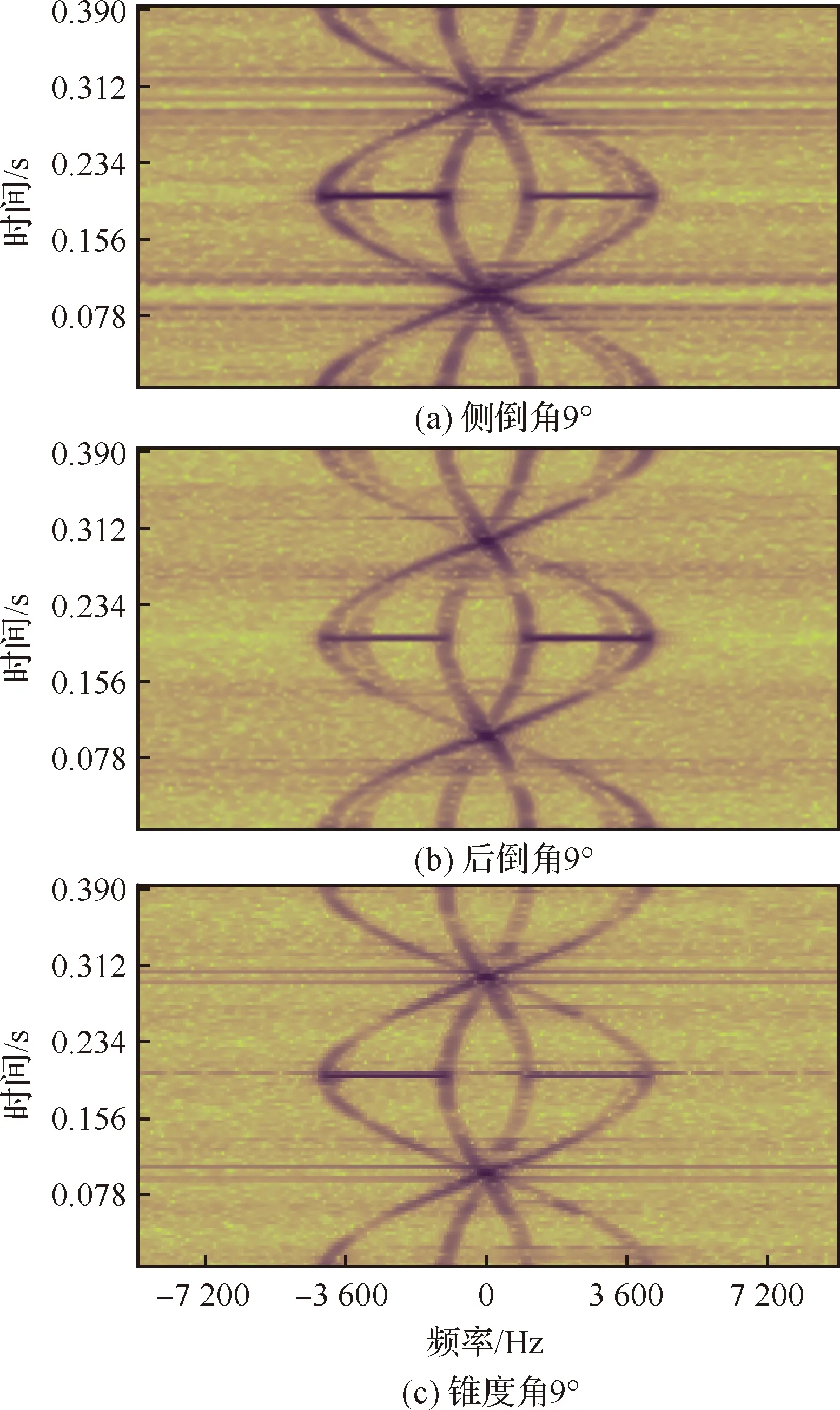
圖13 揮舞角分量對RCS時頻域譜的影響Fig.13 Effect of flap angle components on RCS time-frequency domain spectrum

表2 不同揮舞角旋翼的RCS均值對比
由表2可以看出,旋翼在具有揮舞角的狀態下,揮舞角變化引起的RCS均值變化幅度較小。并且在實際飛行中,槳葉的揮舞角與當地氣動環境以及飛行狀態相關,目標旋翼和靶機旋翼各自的揮舞角難以被實時跟蹤。因此,旋翼的揮舞角及其分量不作為本文相似性設計的參數之一。
3 靶機旋翼動態RCS相似性設計
3.1 雷達最大微多普勒頻移相似性設計
雷達最大微多普勒頻移作為旋翼RCS時頻域譜中最重要的特征,是雷達對靶機旋翼進行識別的主要依據。
分析:對比兩位譯者的譯文可以發現,譯者男女性別身份的不同,對驚嘆語的表達方式也是不一樣的。文中旨在探討為什么詹金斯一家每日入不敷出,卻仍過得十分瀟灑,其中就提到是不是因為詹金斯的老婆是有錢人家,那么文中用了一個驚嘆語“Pooh”旨在表現出詹金斯的老婆根本沒錢,加強語氣。因此,對比楊譯的“呸”與榮譯的“瞎掰”,可以看出,榮譯發揮了自己男性地位要高于女性的特征,男性更傾向于說一些語氣強硬的驚嘆語,而女性,如楊譯的“呸”,就顯得略弱些。
第2節研究了旋翼參數對RCS特性的影響,其中,槳葉片數、轉速和半徑3個基本參數中任意一個發生變化,雷達最大微多普勒頻移特征都會發生顯著改變。與此同時,由于直升機靶機型號有限,旋翼半徑大體上被限制在某一范圍內,所以與半徑差別較大的目標旋翼相比,雷達最大微多普勒頻移通常差別較大。若能實現半徑不同的旋翼之間的雷達最大微多普勒頻移相似,則直升機靶機模擬不同目標RCS的真實性和適用性將得到提升。本節將開展靶機旋翼雷達最大微多普勒頻移特征相似性設計研究。
假設目標旋翼有片槳葉,轉速為,半徑為;靶機旋翼對應的是槳葉片數,轉速和半徑。根據式(6),兩副旋翼的雷達最大多普勒頻移、分別為

(7)

(8)
雷達波入射角和波長不變,要使旋翼的最大微多普勒頻移相同,即=成立,只需要=,即

(9)
式(9)對靶機旋翼與目標旋翼的半徑和轉速間的關系作了規定。當兩副旋翼的半徑不同、轉速不同時,若它們的槳葉片數相同,那么在相同時間內閃爍帶出現的次數不同,因此需要對槳葉片數做出調整。秒內,目標旋翼和靶機旋翼出現的正(負)閃爍帶次數、分別為

(10)
(11)
要使=,兩副旋翼需要滿足條件=,即

(12)
綜合式(9)、式(12),若要使半徑、轉速和槳葉片數均不同的靶機旋翼與目標旋翼雷達最大微多普勒頻移具有相似性,滿足如下相似性條件即可:

(13)
同時,偶數片槳葉旋翼在結構上具有對稱性,總會出現一片槳葉前緣垂直于入射波的同時另一片槳葉的后緣垂直于入射波,因此正、負閃爍帶總是同時出現;而奇數片槳葉旋翼在結構上非對稱,正、負閃爍帶交替出現。槳葉片數的奇偶性決定了旋翼時頻域譜中的閃爍帶是否對稱,所以進行雷達最大微多普勒頻移相似性設計還要加上一個前提條件:靶機旋翼與目標旋翼的槳葉片數奇偶性需保持一致。
為了驗證上述推導的雷達最大微多普勒頻移相似性條件的可行性,并考慮到常規旋翼通常有2~8片槳葉,建立如表3所示的一組偶數片槳葉的不同旋翼模型,計算出它們在垂直極化、10 GHz雷達波照射下的時頻域譜。
從圖14中可以看到4副旋翼的時頻域譜中雷達最大微多普勒頻移特征基本一致:雷達最大微多普勒頻移均為8 377.58 Hz;每兩次正閃爍帶或負閃爍帶出現的時間間隔相同,均為0.05 s,在同一時間內出現相同次數的閃爍帶。
為了驗證本節方法能否應用于奇數片槳葉旋翼的設計,建立如表4所示的兩副旋翼模型,并提取它們在0~0.4 s內的雷達回波信號得到時頻域譜,如圖15所示。

表3 偶數片槳葉旋翼參數Table 3 Parameters of rotors with even blades
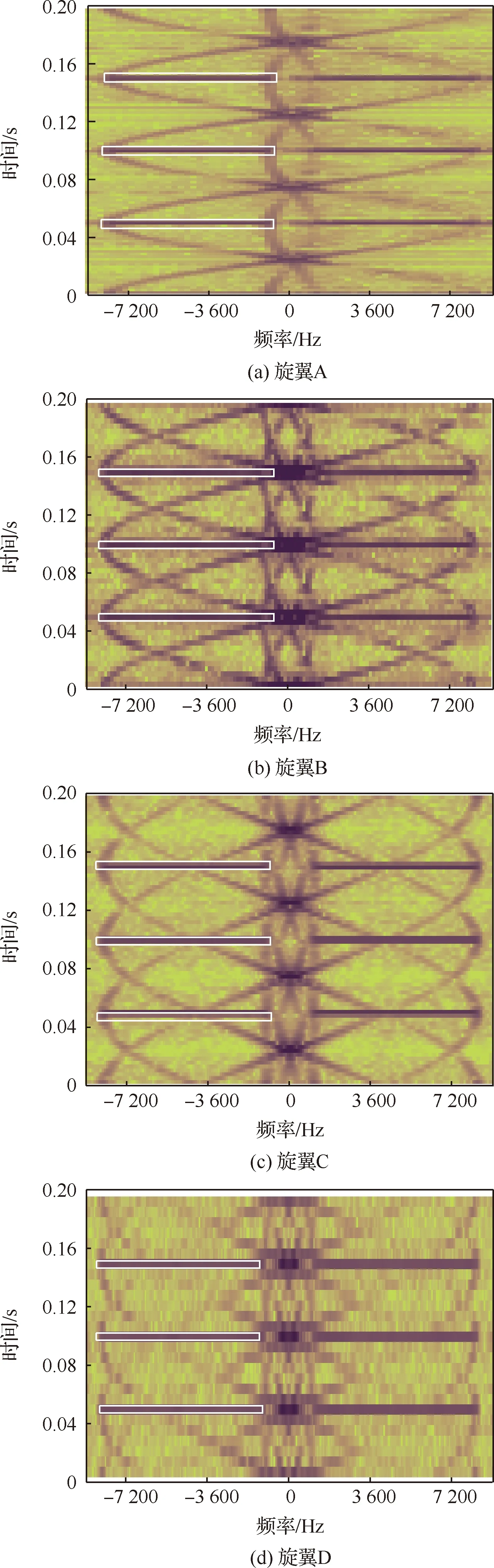
圖14 偶數片槳葉旋翼時頻域譜Fig.14 Time-frequency spectrums of rotors with even blades
從圖15中可以看到,兩副旋翼的雷達最大微多普勒頻移帶寬相同,且兩次閃爍帶出現的時間間隔一致,驗證了相似性條件同樣適用于靶機旋翼對奇數片槳葉目標旋翼的雷達最大微多普勒頻移特征相似性設計。上述結果表明了通過已知的目標旋翼基本參數,基于本節給定的相似性條件構造靶機旋翼,能夠使它們具備相似的雷達最大微多普勒頻移特征。

表4 奇數片槳葉旋翼參數Table 4 Parameters of rotors with odd blades
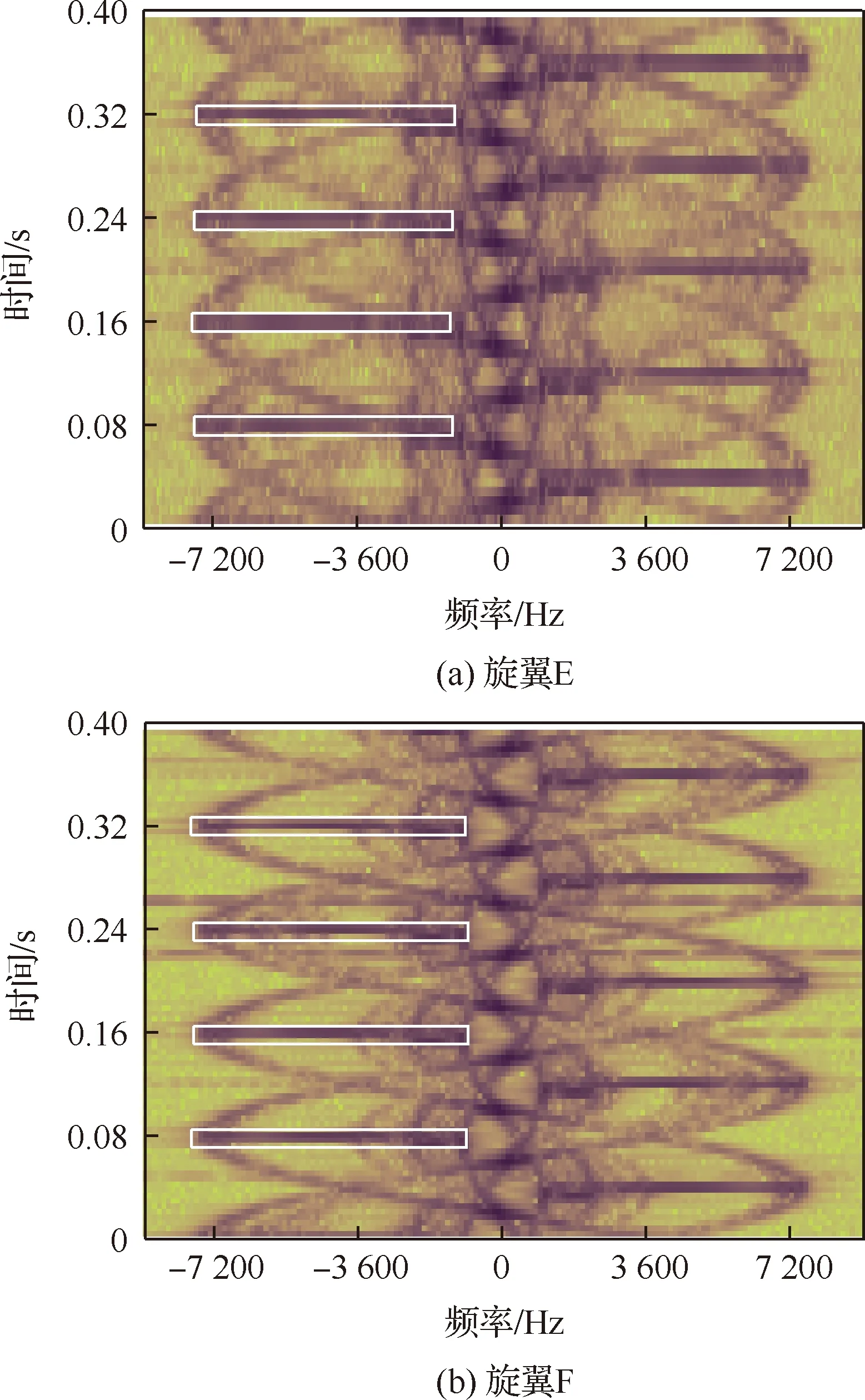
圖15 奇數片槳葉旋翼時頻域譜Fig.15 Time-frequency spectrums of rotors with odd blades
3.2 RCS強度相似性設計
3.1節研究了通過調整槳葉片數、轉速和半徑等基本參數,能夠進行靶機旋翼的最大微多普勒頻移特征相似性的設計,同時旋翼的動態RCS時頻域譜中還展現了另一種重要的特征,即旋翼動態RCS強度。RCS強度由時頻域譜的灰度亮暗程度和分布共同體現。
在進行雷達最大微多普勒頻移相似性設計時,靶機旋翼與目標旋翼的槳葉片數、轉速和半徑區別較大,而上述3個參數的任意一個發生變化都會造成旋翼RCS強度在時域上的特征差距明顯,進而導致時頻域譜亮暗分布不同。鑒于此,本節將在靶機旋翼已經完成雷達最大微多普勒頻移相似性設計的基礎上,開展如何進一步完成動態RCS強度的相似性設計研究。
選取表3中旋翼B、C、D(3副旋翼的雷達最大微多普勒頻移特征一致),假設3副旋翼采用相同弦長的NACA0010翼型,在10 GHz、垂直極化雷達波條件下計算它們的水平面RCS均值:旋翼D為-3.598 dBsm,旋翼C為-5.759 dBsm,旋翼B為-8.539 dBsm,可以明顯看到隨著槳葉片數和半徑的減小,RCS強度逐漸降低。
在弦長一定的條件下,采用相對厚度小的翼型能夠降低RCS的強度。以旋翼D作為目標旋翼,采用NACA0010翼型;選擇旋翼C和旋翼B作為靶機旋翼類型,控制旋翼實度不變,都分別采用NACA0010、NACA0012、NACA0014、NACA0016、NACA0018和NACA0020這6種翼型。得到它們在水平面的RCS均值隨翼型變化如圖16 所示。
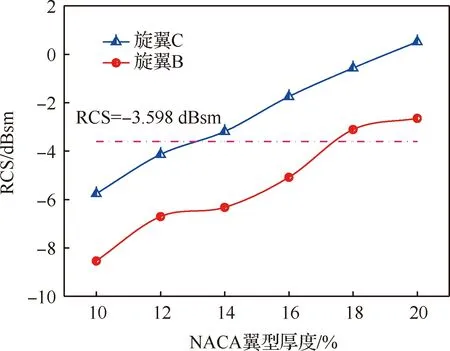
圖16 RCS均值隨翼型厚度變化規律(偶數片)Fig.16 Mean RCS varying with airfoil thickness (even blades)
圖16中橫線代表的是目標旋翼D的RCS均值(-3.598 dBsm)。不同的旋翼RCS均值都隨著翼型厚度的增加而增加,在相同翼型厚度下旋翼C的RCS大于旋翼B。當3副旋翼均采用NACA0010翼型時,目標旋翼D的RCS大于旋翼C和旋翼B,隨著翼型厚度的增加,旋翼C和B的RCS逐漸超過目標旋翼。總體來看,目標旋翼D的RCS與采用NACA0014翼型的旋翼C和采用NACA0018翼型的旋翼B最為接近,二者分別是-3.190 dBsm和-3.109 dBsm。以上是對旋翼的RCS均值進行分析,為了研究旋翼動態RCS在時域上的分布狀況,規定收發雷達位置和旋翼中心位置不變(見圖17),采用時間推進的方式對這3副旋翼在不同時間點的RCS進行采樣。旋翼D、C、B的旋轉周期分別為0.4 s、0.3 s和0.2 s,在相同計算條件下得到它們以各自轉速旋轉0~0.4 s的RCS分布,如圖18所示。
從圖18可以看出目標旋翼與靶機旋翼在相同時刻出現RCS極大值區域,幅值較為接近,RCS隨時間的分布規律基本一致。表明了對于雷達最大微多普勒頻移特征相似,但基本參數完全不同的靶機旋翼與目標旋翼,能夠通過改變翼型厚度使它們進一步具有相似的RCS均值和時域RCS動態分布,達到靶機旋翼動態RCS強度相似性設計的目標。

圖17 收發雷達與旋翼位置關系Fig.17 Position relationship between transceiver radar and rotor

圖18 不同旋翼時域動態RCS分布圖(偶數片)Fig.18 Dynamic RCS profile of different rotors in time domain (even blades)
至此,在10 GHz、垂直極化雷達波條件下,對于NACA0010翼型的目標旋翼D,由NACA0014翼型的靶機旋翼C和NACA0018翼型的靶機旋翼B能夠較好地模擬出相似的雷達最大微多普勒頻移特征和RCS強度特征,但這兩個特征是針對頻域和時域分開進行模擬,仍需要對于三副旋翼的動態RCS時頻域特性進行綜合分析,確定最適合的靶機旋翼相似性設計方案。
分別提取出3副旋翼時頻域譜的零頻處時域曲線和=0.1 s時的頻域曲線,如圖19所示。可以看到,靶機旋翼C的時域曲線變化與目標旋翼D更為接近,旋翼B時域曲線震蕩較為劇烈,但它們總體變化趨勢一致;在頻域曲線上,旋翼D和旋翼B在零頻附近的分量幅值均高于其他頻率分量的幅值,在零頻附近出現了閃爍點,但旋翼C的零頻分量幅值是極小值,與目標旋翼D的頻域特征相差較大。綜上所述,雖然6片槳葉的旋翼C和4片槳葉的旋翼B均能模擬出8片槳葉的旋翼D的頻域雷達最大微多普勒頻移特征和時域動態RCS強度特征,但將時域、頻域聯合進行分析時,旋翼B的RCS時頻閃爍點特征顯然更接近于旋翼D,可以更好地模擬目標旋翼的雷達散射特性,且RCS強度相似誤差在0.408 dB以內。
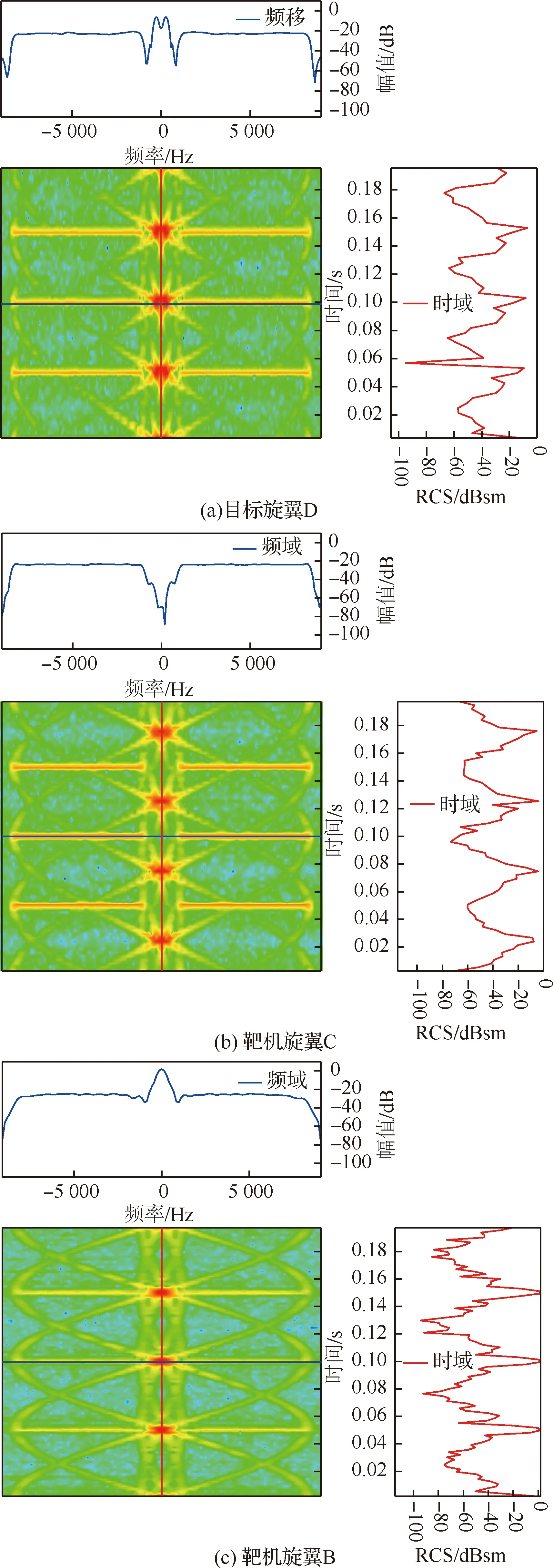
圖19 不同旋翼的時域/頻域展開曲線(偶數片)Fig.19 Time/frequency domain curves of different rotors (even blades)
為了驗證本節方法能否應用于奇數片槳葉旋翼的RCS強度相似性設計,以表4中旋翼E(采用NACA0010翼型)作為目標旋翼,建立分別采用NACA0010、NACA0012、NACA0014、NACA0016、NACA0018和NACA0020這6種翼型的旋翼F,計算它們在10 GHz、垂直極化雷達波照射下的水平面RCS均值對比如圖20所示。
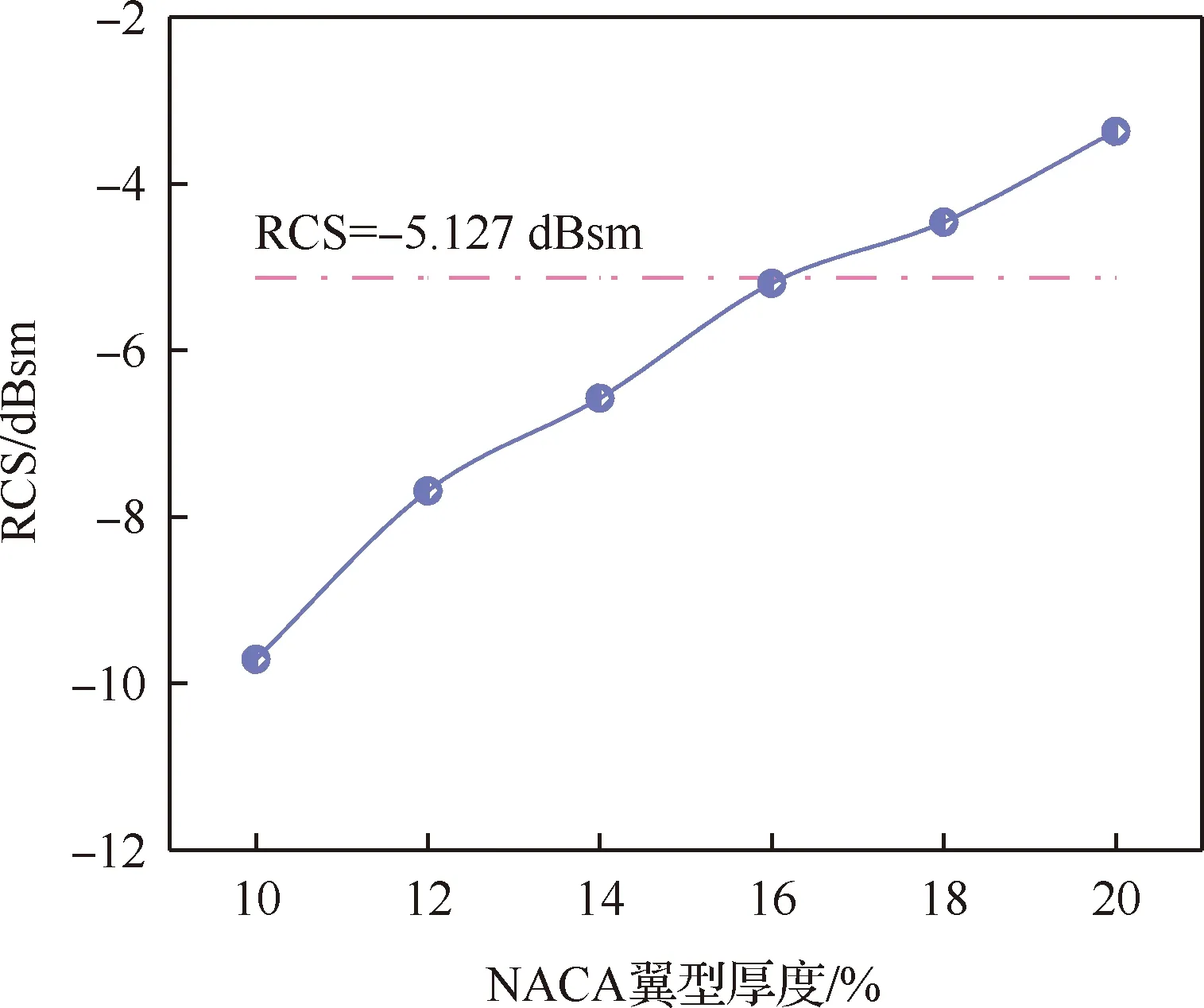
圖20 RCS均值隨翼型厚度變化規律(奇數片)Fig.20 Mean RCS varying with airfoil thickness(odd blades)
圖20中橫線代表的是目標旋翼E的RCS均值(-5.127 dBsm),旋翼F的RCS均值隨著翼型厚度的增加而增加,當旋翼F采用NACA0016翼型時,RCS均值為-5.196 dBsm,與目標旋翼最接近。鑒于此,作出目標旋翼E和NACA0016翼型的靶機旋翼F的時域動態RCS分布如圖21所示。
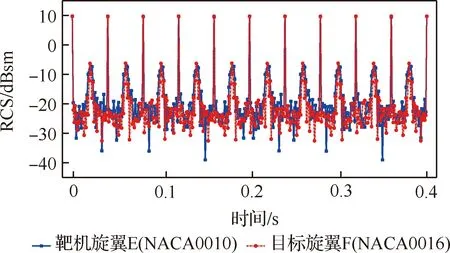
圖21 不同旋翼時域動態RCS分布圖(奇數片)Fig.21 Dynamic RCS profile of different rotors in time domain(odd blades)
由圖21可以看出,靶機旋翼與目標旋翼的時域動態RCS幅值基本一致,RCS強度隨時間的變化規律相吻合。再進一步綜合分析兩副旋翼的RCS時頻域特征,分別提取出它們時頻域譜的零頻處時域曲線和=0.2 s時的頻域曲線,如圖22所示。
從圖22中可以看出,旋翼E和旋翼F頻域的雷達微多普勒特征和時域的RCS強度均吻合較好,因此針對5片NACA0010翼型槳葉的目標旋翼E,選取3片NACA0016翼型槳葉的靶機旋翼F,能夠模擬出相似的動態RCS特征,且RCS強度相似誤差在0.069 dB以內。

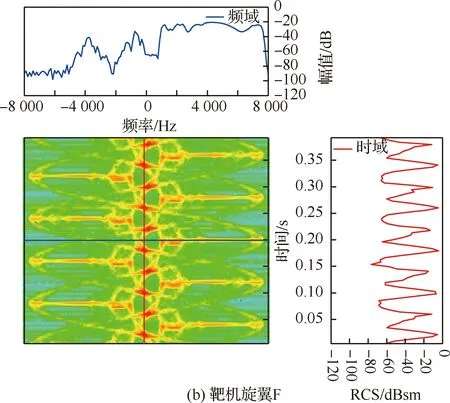
圖22 不同旋翼的時域/頻域展開曲線(奇數片)Fig.22 Time/frequency domain curves of different rotors(odd blades)
因此,靶機旋翼與目標旋翼的相似性設計是一個綜合對比不同設計方案下旋翼動態RCS時頻特征的擇優過程。
本文在進行靶機旋翼的相似性設計時,兼顧旋翼氣動性能,主要對動態RCS特性進行模擬,具體設計流程如圖23所示。
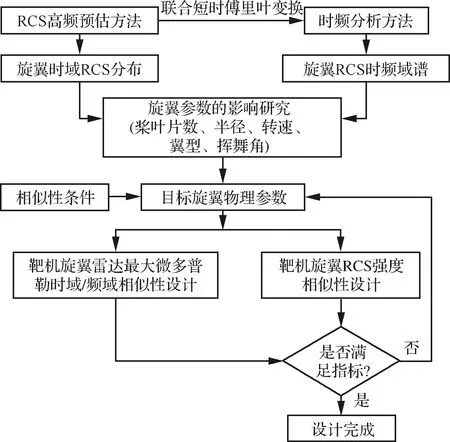
圖23 基于動態RCS特征相似的靶機旋翼設計流程Fig.23 Design process of target rotor based on similar dynamic RCS characteristics
4 結 論
本文建立了基于動態RCS時頻域特征相似的靶機旋翼設計方法,得出以下結論:
1) 旋翼雷達回波信號時頻特性中的雷達最大微多普勒頻移特征以及動態RCS強度特征與旋翼參數緊密相關:槳葉片數、半徑和轉速任意一個參數的改變都將引起兩個特征的顯著變化;翼型厚度的改變會影響RCS強度,但對微多普勒特征影響甚微;翼型彎度和揮舞角的改變對旋翼散射特性影響較弱,在相似性設計中可以不考慮這兩個參數。
2) 推導了不同旋翼雷達最大微多普勒頻移特征的相似性條件,驗證了基于目標旋翼的已知參數,可以通過構造靶機旋翼的基本參數,實現雷達最大微多普勒頻移的相似性設計。
3) 以時間推進的方式,在雷達最大微多普勒頻移相似性設計完成的基礎上,改變靶機旋翼翼型厚度可以實現對目標旋翼的動態RCS強度相似性模擬,再綜合對比它們的RCS頻域、時域特征,能夠進一步提出模擬目標旋翼雷達散射特性的擇優方案,并達到了最大微多普勒頻移相同、RCS強度相似性誤差小于0.408 dB的設計效果。
通過本文建立的相似性設計方法,能夠實現直升機靶機旋翼對目標旋翼動態RCS特征的模擬,提高靶機模擬真實目標的逼真程度,有利于精確評估防御武器的作戰性能。但由于靶機旋翼的設計是一項需要綜合考慮氣動、電磁等多方面特性的任務,而本文提出改變靶機旋翼轉速和槳葉厚度,在使用過程中可能會增加對動力系統的要求,并導致阻力激增,所以,若要將本文的方法應用于實際中,仍需對目標旋翼、靶機旋翼的真實性能進行測試驗證。
