防撞輔助系統對執行器的需求及交互策略
2022-09-06 04:30:40蔣俊
時代汽車 2022年17期
蔣俊
上汽通用五菱汽車股份有限公司 廣西柳州市 545007
1 防撞輔助系統簡介
防撞輔助系統通過雷達、攝像頭等感知技術實時、主動地探測前方車輛及行人或其它障礙物的運動狀況,同時結合本車的行駛情況,根據車況的綜合信息對車輛當前行駛狀態做出分析和判斷,在判斷存在碰撞風險時,會采取聲音、視覺或觸覺等方式向駕駛員發出報警,提示駕駛員注意接管車輛以規避危險。當碰撞危險加劇到一定程度時,判斷駕駛員仍未能做出有效地反應,系統會通過制動系統對汽車進行自動緊急制動,快速減低本車的速度,避免車輛碰撞情況發生或盡最大可能地降低碰撞造成的傷害程度。
防撞輔助系統按照子功能可分為前碰報警、預填充、HBA 閥值調整、點剎報警、AEB(自動緊急制動)。各功能的觸發取決于感知模塊對當前車身行駛環境的分析決策,沒有嚴格的觸發優先級區分。
2 防撞輔助系統架構
目前所有的輔助駕駛系統都可分為環境感知、決策規劃、控制執行三個層面,防撞輔助功能也可在這三個層面來分析系統架構。環境感知主要由毫米波雷達、攝像頭或者二者融合的方案來實現;對于簡單的系統,決策規劃也集成于毫米波雷達或攝像頭內,根據環境感知結果來分析判斷,進一步做出決策。執行端主要包括以汽車電子穩定控制系統(ESC)為基礎的電機柱塞泵主動建壓制動系統解決方案、以汽車電子液壓制動系統為基礎的高壓蓄能器主動建壓制動系統解決方案、以新型汽車電子助力制動系統為基礎的主缸助力電機主動建壓制動系統解決方案。[從整車成本及方案成熟度考慮,中低端車型執行器基本選用ESC 模塊。
下圖1 為某車型的防撞輔助系統的架構簡圖,以毫米波雷達作為感知及決策模塊,ESC 作為主執行器進行制動控制。各控制模塊通過CAN 現場總線進行信號的通訊,駕駛員可通過車機對防撞輔助系統進行開啟關閉設置及其它參數設置。除ESC 作為執行器對車身進行控制外,儀表通過文字或指示燈顯示、聲音提示等方式來提醒駕駛員。在AEB 激活的情況下,危險警示燈點亮用以警示其它車輛。
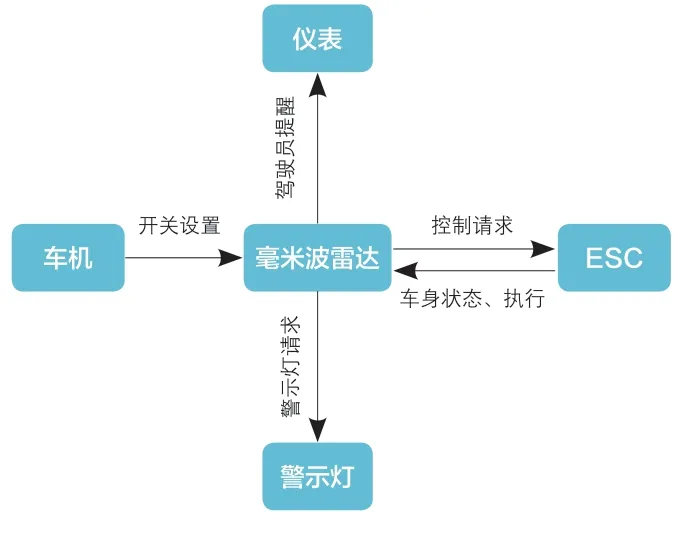
圖1 防撞輔助系統架構圖
3 交互信號
3.1 雷達發送信號
3.2 ESC 發送信號
表1 和表2 中列出了防撞輔助系統中雷達與ESC 的主要的交互信號,這些信號通過報文方式周期性的發送,報文周期需嚴格控制在20ms 及以下。雷達接收從ESC 發送來的車身運動狀態信息,如車速、制動主缸壓力、子功能可用狀態等,結合自身感知的行駛環境做出相應的決策請求。ESC 模塊在接收到雷達的預建壓請求、AEB 請求等請求信號后,執行相應的動作,執行后ESC 會反饋激活的信號給雷達。
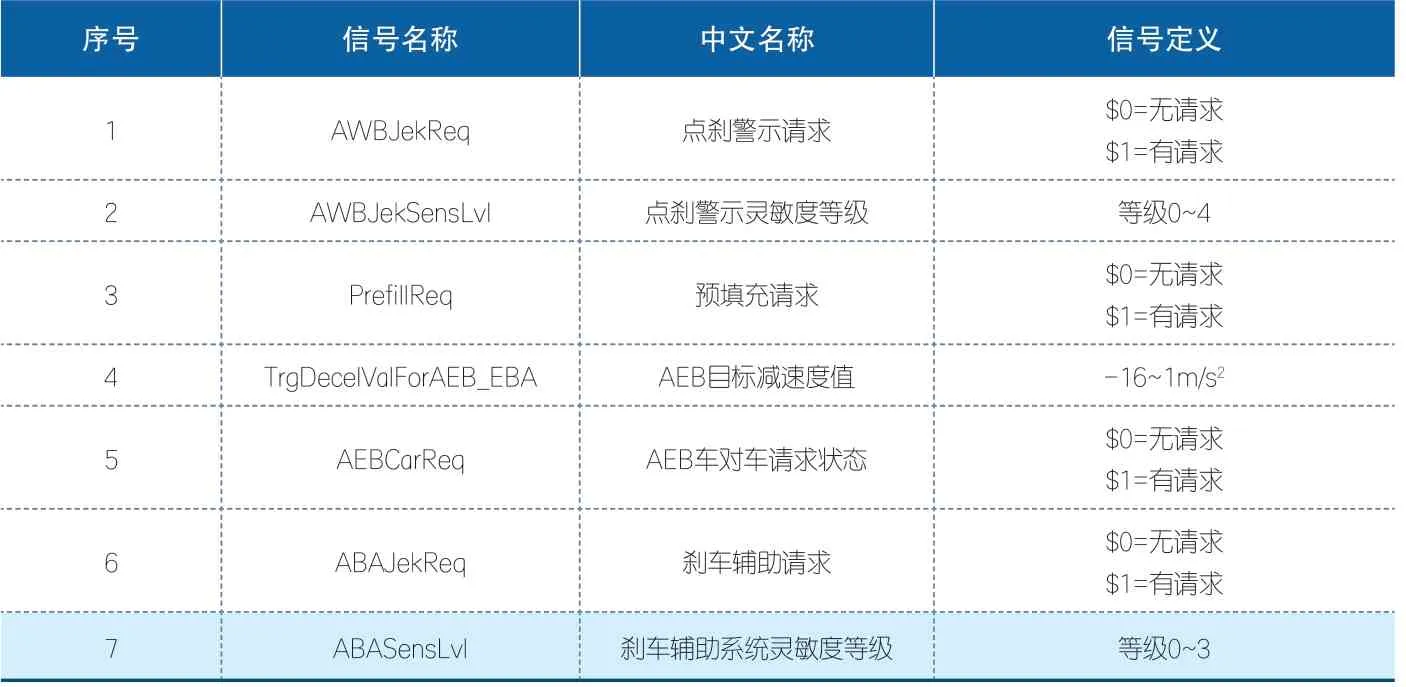
表1 雷達發送給ESC的信號
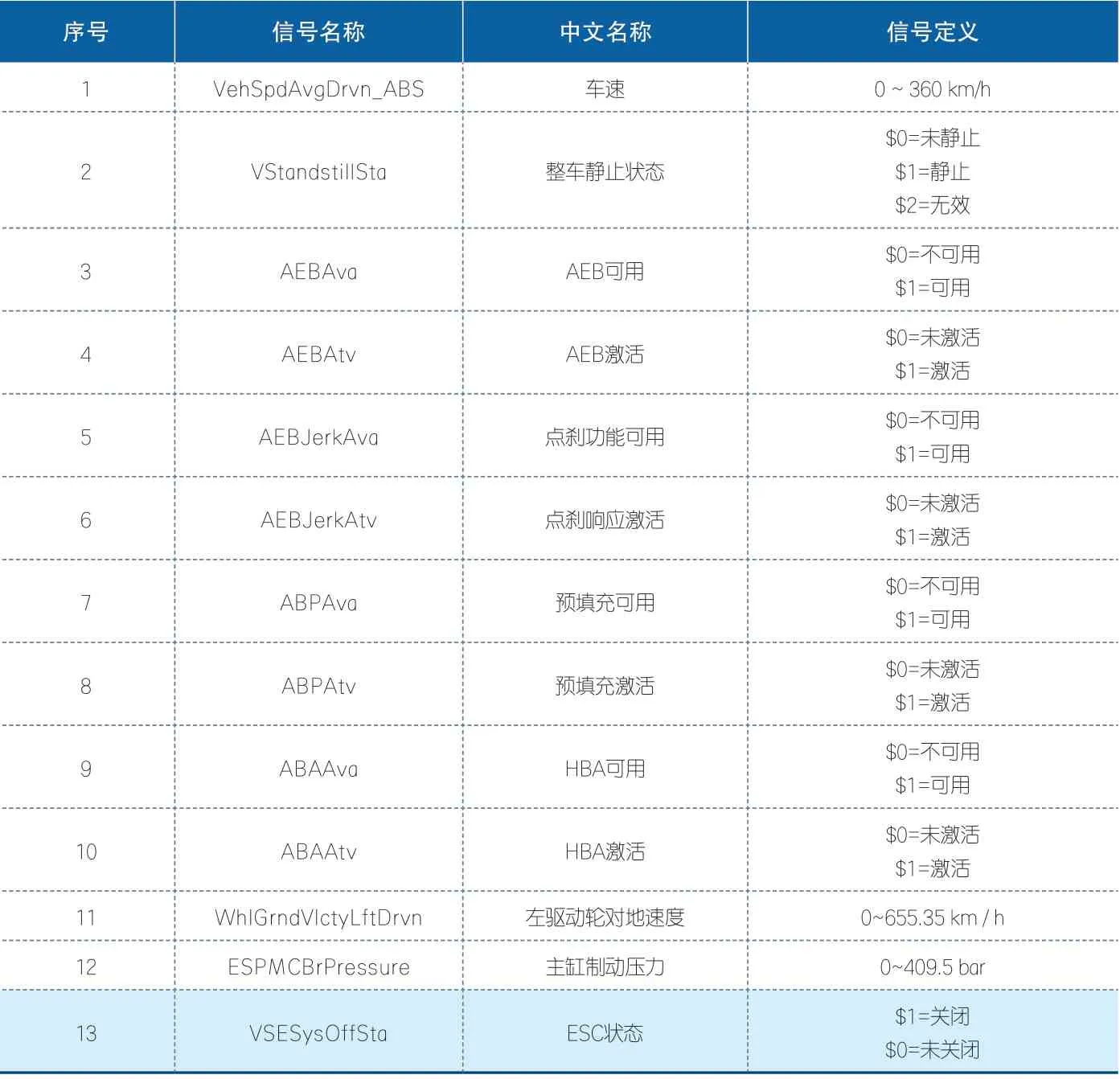
表2 ESC發送給雷達的信號
4 系統交互策略
4.1 預填充策略
預填充是通過ESC 在輪缸內建立一個小的輪缸壓力,以消除制動片與制動盤二者間間隙,從而達到制動系統可以在駕駛員制動時作出更快響應的目的。
在ESC 無故障的情況下,會一直反饋“預填充可用”為$1=可用。當雷達感知到行車的環境符合預填充的條件時,雷達發送“預填充請求”為$1=有請求,請求ESC 進行預填充。ESC接收到信號后,建立一個約5bar(可標定)的制動壓力,同時反饋“預填充激活”為$1=激活表示已完成建壓,完成握手交互。
為避免ESC 長期建壓,通常情況下,預填充最長請求時長為5s。超過5s 后,即便依舊有請求信號的情況下,ESC 將會泄壓,不再執行。此時“預填充激活”為$0=未激活,“預填充可用”為$1=可用。同時,ESC 需判斷兩次需要判斷兩次請求的時間間隔,若小于20s(上一次響應到下一次需求),則ESC 模塊不執行第二次預填充請求。
4.2 HBA 閥值調整策略
HBA(液壓制動輔助系統)功能是ESC本身的功能,能通過監測制動壓力信號,HBA 可以發覺到駕駛員進行緊急制動的意愿,從而自動補上緊急制動時不足的制動力。HBA 閥值調整為防撞輔助系統的功能,雷達能根據探測到的緊急情況,降低HBA 觸發的閥值,使駕駛員制動時,更容易觸發HBA 功能,達到減小制動距離的效果。
在ESC 無故障的情況下,“ABA 可用”為$1=可用。滿足潛在碰撞危險條件時,雷達會將“剎車輔助請求”置為$1=有請求,同時“剎車輔助系統靈敏度等級”由0 調整至響應的等級;ESC 接收到信號后將降低觸發HBA 功能的閾值,并準備好觸發HBA 功能(等待駕駛員踩制動踏板)。
4.3 點剎報警策略
點剎報警為防撞輔助系統在危險情形下對駕駛員提醒的一種方式,在前碰報警后駕駛員依舊未接管且車輛危險程度變高或突發危險的情況下,通過短促而有力的制動來提醒駕駛員接管車輛。
在ESC無故障的情況下,“點剎功能可用”一直為$1=可用。當雷達感知到車輛危險情況滿足點剎功能觸發的條件時,“點剎警示請求”為$1=有請求,“點剎警示靈敏度等級”由等級0 調整至相應的等級。ESC 會根據接收到的不同敏感度等級建立不同的制動壓力。點剎功能觸發中,ESC 會反饋建壓激活狀態信號“點剎響應激活”為$1=激活給雷達。
點剎功能主要目的是提醒駕駛員接管車輛,而非進行持續制動。所以點剎對ESC 有以下需求:車輛減速度在0.1g-0.3g 之間,作用時間為0.2s-0.4s,點剎時速度降最大不超過5km/h。
4.4 自動緊急制動策略
自動緊急制動功能是雷達感知車輛處于極其危險情形且駕駛員未做出有效的接管的情況下,通過與制動系統協作控制車身減速,達到避免碰撞或者減小碰撞程度的效果。
在ESC 無故障的情況下“AEB 可用”一直為$1=可用。雷達感知到行車的環境符合自動緊急制動觸發的條件時,“AEB 車對車請求狀態”為$1=有請求,同時通過“AEB目標減速度值”發送計算減速度值給ESC。ESC 接收到信號后,對輪缸制動壓力進行精準加壓,以達到雷達請求的減速度值。同時將“AEB 激活”置$1=激活進行反饋。
AEB 觸發時ESC 需短時間內建立一個比較大的制動壓力,這對ESC 的壽命性能均有一定的影響。所以ESC 自身對其做了限制:在響應AEB 功能時,最長執行時間為5s;同時ESC 會判斷兩次AEB 觸發的時間間隔,若小于10s 時,ESC 不會執行第二次的請求。雖然這類執行器本身的要求制約了AEB 的功能退出或者無法激活,但ESC 依舊會發出“AEB 可用”一直為$1=可用。
5 執行器(ESC)性能需求及測試
表3 列出了防撞輔助駕駛系統對ESC 的性能需求,主要集中在自動緊急制動部分。對于 ESC 的響應性能,一般使用 CANoe 軟件中的 capl 編程語言來進行測試。如圖2所示,用capl 設置一個階躍的減速度來查看ESC 的響應情況:黃色曲線代表雷達的請求減速度,綠色曲線代表ESC 響應的減速度。
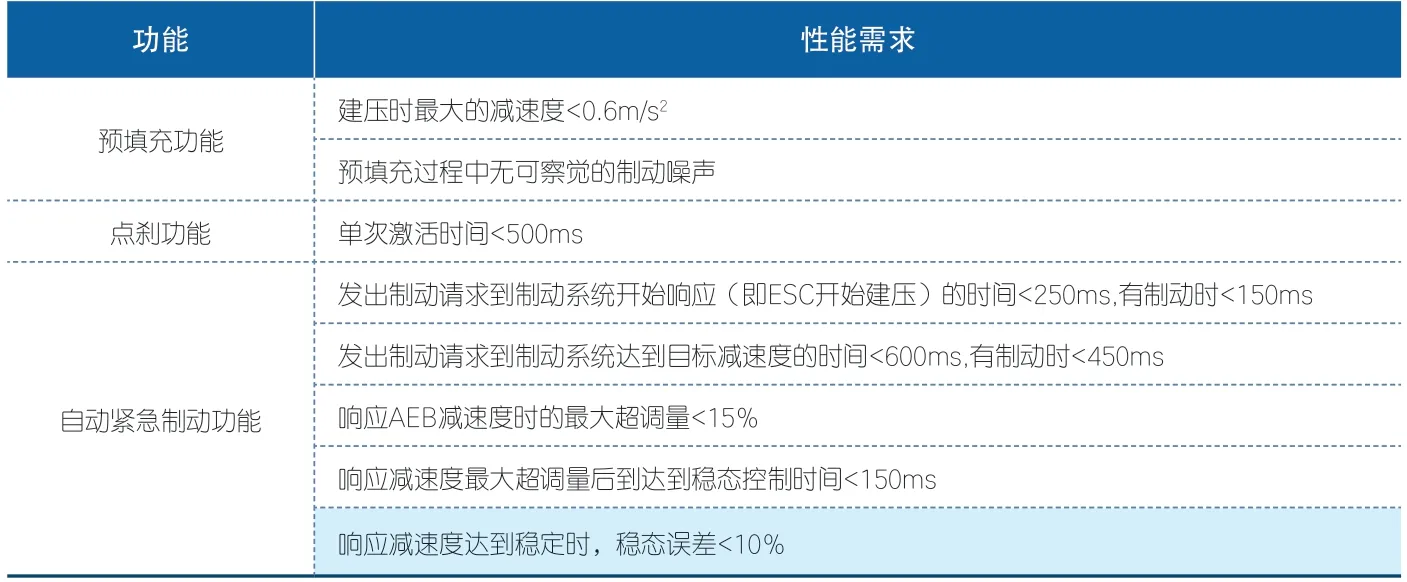
表3 對ESC的性能要求
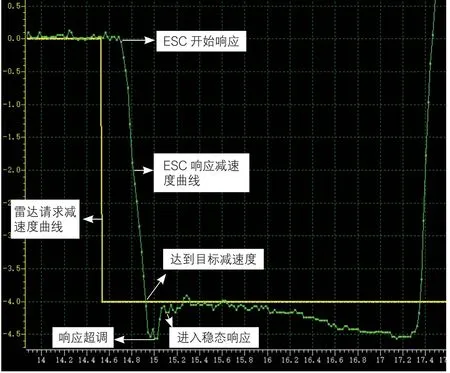
圖2 ESC響應曲線
(1)雷達在t=14.52s 時,開始有減速度請求,請求的減速度為-4m/s。在
t=14.70s 時ESC 開始建壓,反應時間為 182ms,滿足需求;
(2)在t=14.92s 時,建壓滿足目標減速度,則響應時間為403ms,滿足需求;
(3)ESC 建壓時,超調量為-4.56m/s,超調量為14%,滿足需求;
(4)在t=15.12s 時,ESC 建壓穩定,進入穩態響應狀態,穩態控制時間為100ms,滿足需求;
(5)進入穩態后,最大的穩態誤差在t=17.14s,為-4.56m/s,超調精度為14%,不符合<10%的要求。
以上為階躍型的減速度測試案例,實際還有例如梯度型減速度測試案例等。通過不同測試案例的多次測試結果來綜合評定 ESC 是否符合要求。
6 結語
防撞輔助功能是一個系統工程,既取決于感知及決策模塊的正確規劃,也需要執行端的快速響應。目前汽車智能化正快速的推進,隨著成本的下降及用戶對安全要求的提高,防撞輔助系統會逐步成為汽車的標配。深入了解決策端與執行端的交互策略、分析執行器的性能,可以完善優化目前系統存在的一些問題,也能為后續汽車開發提供更安全可靠的防撞輔助功能。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
中國科技論壇(2017年7期)2017-07-25 08:49:53
公民與法治(2016年4期)2016-05-17 04:09:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55