基于貝葉斯網絡的自動駕駛感知系統預期功能安全的分析研究
2022-09-06 04:30:42姜建滿范賢根崔玉順
時代汽車 2022年17期
姜建滿 范賢根 崔玉順
1.安徽職業技術學院 安徽省合肥市 230000 2.安徽江淮汽車集團股份有限公司 安徽省合肥市 230000
1 引言
特斯拉感知算法未檢測出白色卡車車廂的致死事故;Uber 決策系統失誤,碰撞違規穿越馬路行人的交通事故等,一度將自動駕駛車輛的安全問題推向行業的研究熱點。與傳統車輛的不同,自動駕駛車輛會發生在電子電器系統沒有發生故障的情況下,出現非預期的行為,即預期功能安全的問題。自動駕駛車輛在極端天氣(雨、雪、霧、風等)、光照條件等多種因素均會導致感知系統感知能力不足,如惡劣的環境會造成數據造成增大、傳感器視野受限等。ISO21448 道路車輛——預期功能安全標準中將觸發條件定義為導致自動駕駛系統后續出現危害行為的特定場景條件。
然而,現有關于自動駕駛預期功能安全的研究分析多為定性分析某一系統或者某一功能的低級別自動駕駛車輛;關于觸發條件的分析是基于整車級的危害映射到感知-決策-執行的性能缺陷,從性能缺陷再映射到觸發條件,缺乏正向地系統地對導致自動駕駛車輛出現非預期行為的觸發條件進行建模和計算。本文提出一種自動駕駛感知系統預期功能安全觸發條件的建模方法,通過對自動駕駛感知系統觸發事件鏈貝葉斯網絡的計算,預測自動駕駛非預期功能安全是否發生。
2 自動駕駛感知系統功能不足和性能局限性分析
首先,根據可能引起自動駕駛預期功能安全的感知系統功能不足和性能局限,構建雨、雪、霧;光線不足和視覺盲區觸發事件鏈的貝葉斯網絡。
根據系統工程理論,將引起自動駕駛感知系統預期功能安全的觸發條件看作一個各種要素相互聯系作用形成的系統,與觸發條件相關的各要素可以劃分為:輸入要素、狀態要素和輸出要素。輸入要素指影響自動駕駛感知系統預期功能安全的外部因素的集合,主要道路結構、交通設施、臨時事件、參與者、環境信息和自車狀態。狀態要素用于描述觸發條件在演化過程中的性質和特征,包括以上六層模型的屬性及屬性之間的關聯關系。輸出要素表示觸發條件引發的后果,包括感知過程方面如原始數據的失真、缺失以及噪聲等;認知過程方面如未識別出目標物、目標物分類錯誤及參數誤差等。
從輸入、狀態和輸出三個層面描述可能導致自動駕駛預期功能安全的觸發變量,作為貝葉斯網絡變量,并建立貝葉斯網絡,然后按照三者之間的關聯關系將三個貝葉斯網絡進行合并,形成雨、雪、霧;光線不足和視覺盲區事件鏈貝葉斯網絡。雨、雪、霧;光線不足和視覺盲區三個子事件貝葉斯網絡的變量描述見下表1 所示,其中黑體字體表示子事件的共有事件關聯變量,斜體字表示共有損失輸出變量。
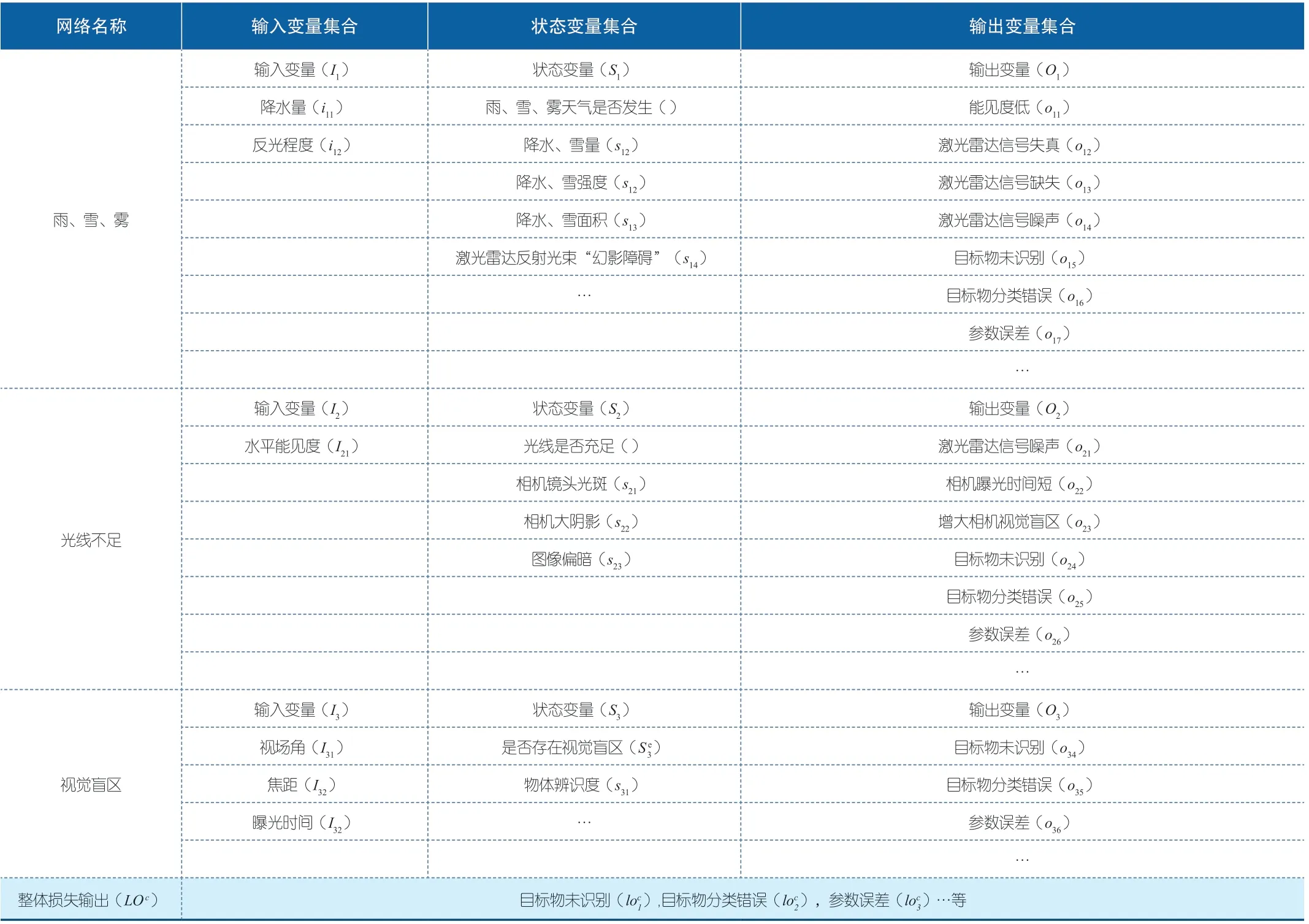
表1 自動駕駛感知系統貝葉斯網絡中的變量
上表可以看出,雨、雪、霧和光線不足的共有事件關聯變量為={},共有損失輸出變量集合為={、、、},光線不足貝葉斯網絡和視覺盲區貝葉斯網絡的共有事件關聯變量為={},共有損失變量合集為={、、},將指派給雨、雪、霧貝葉斯網絡,指派給光線不足網絡,以與為連接點將雨、雪、霧;光線不足和視覺盲區三個貝葉斯網絡關聯;以和為連接點合并雨、雪、霧;光線不足和視覺盲區事件損失輸出后,整體損失輸出為LO={lo、lo、lo}形成雨、雪、霧;光線不足和視覺盲區事件鏈的貝葉斯網絡。
3 自動駕駛感知系統觸發條件的貝葉斯網絡構建
分析自動駕駛感知系統外部環境條件雨、雪、霧;光線不足和視覺盲區事件鏈貝葉斯網絡的條件概率。
(1)輸入對狀態的影響。子事件雨、雪、霧關聯子事件光線不足,對于的任一狀態變量S∈S,若直接與輸入變量相連接,則發生概率如下:
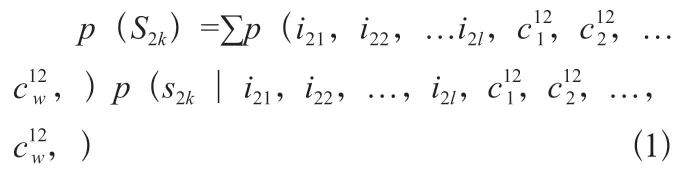
(2)狀態對狀態的影響。對于子事件中任一狀態變量S∈S,若不受輸入變量影響,則發生概率如下:

(3)狀態對輸出的影響。,,,…S,為有關聯關系的影響自動駕駛感知系統預期功能安全觸發事件,,,…EN的狀態變量集合,O為觸發事件EN的輸出變量集合,則對任一事件EN中任一輸出變量O∈O,有下列概率關系:

EN的輸出變量集合O包含兩部分,一部分成為其他事件的輸入變量,另一部分為子事件EN的損失輸出變量,若同時又是其他事件的共有損失輸出變量,則可以作為觸發事件鏈貝葉斯網絡的整體損失輸出變量集合LO中的變量。
LO={lo|1 ≤≤}為觸發事件鏈貝葉斯網絡的整體損失輸出,LO O且滿足下列概率關系:

其中,lo表示觸發事件鏈對外部環境的第類損失的整體損失輸出,表示關聯合并的子事件貝葉斯網絡的個數。
4 感知系統預期功能安全觸發事件鏈的貝葉斯網絡推理
最后,進行自動駕駛感知系統預期功能安全觸發事件鏈的貝葉斯網絡推理,預測觸發條件事件鏈模型下自動駕駛非預期功能安全是否發生。
設觸發事件鏈貝葉斯網絡中輸入變量集I和狀態變量集S中部分狀態變量為證據變量,S中其余的狀態變量和輸出變量O為目標變量,根據證據變量的取值,可以計算目標變量各種取值的后驗概率。
根據證據變量的取值信息計算其他目標變量的取值概率。
依據公式(1)、(2)與(S|,,…)判斷該觸發事件是否發生,若發生則繼續計算其他狀態變量的取值概率,并根據公式(3)計算輸出變量的取值概率,否則停止計算,從而得到觸發事件鏈貝葉斯網絡中各目標變量的后驗概率。
匯總各觸發事件的狀態與輸出
根據上述步驟得到的后驗概率,將狀態變量S取值為1 的概率大于取值為0 的概率的各子事件的狀態變量集合,,…S,及其損失變量輸出變量,,…LO,中的變量進行匯總。
觸發事件鏈的狀態是其鏈上各子事件狀態變量的集合,其概率分布為:


根據可能引起自動駕駛感知系統預期功能安全的觸發條件事件鏈的狀態變量集合,整體損失輸出變量集合的取值概率,可預測與初始觸發條件相關聯的其他觸發條件的關鍵狀態及觸發條件事件鏈給自動駕駛車輛帶來的非預期功能安全。
5 結語
文中提出一種自動駕駛感知系統預期功能安全觸發條件的建模方法,通過對自動駕駛感知系統觸發事件鏈貝葉斯網絡的計算,預測自動駕駛非預期功能安全是否發生。首先,統一抽象自動駕駛感知系統預期功能安全觸發事件鏈模型,根據預期功能安全觸發條件內部各要素間關聯關系建立輸入、狀態和輸出三層結構;其次,構建觸發條件事件鏈貝葉斯網絡,確定網絡中各變量的先驗概率和條件概率集合;最后,明確觸發條件事件鏈間的關聯模式,形成自動駕駛感知系統觸發事件鏈貝葉斯網絡結構,對觸發條件引發的可能導致自動駕駛非預期功能安全的連鎖反應過程進行預測和分析。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20