大眾ID.4車電氣聯網系統技術淺析
2022-09-06 03:36:42江蘇聯合職業技術學院無錫汽車工程分院
汽車維護與修理 2022年5期
江蘇聯合職業技術學院無錫汽車工程分院 譚 婷
1 E3架構總線簡介
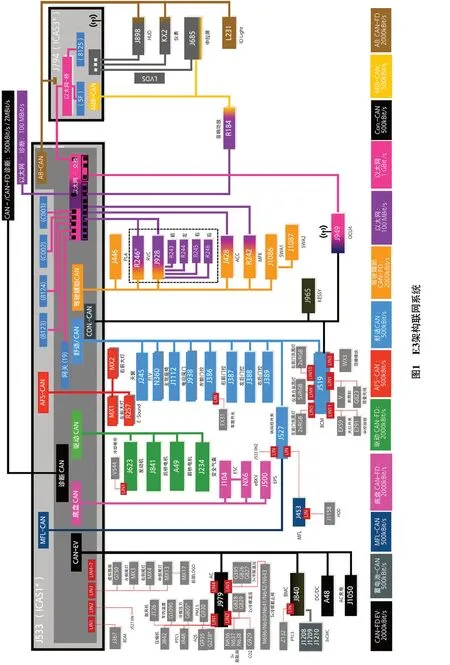
大眾ID.4車是大眾品牌首款基于MEB平臺(模塊化電驅動平臺,用于純電動汽車的制造平臺,能夠兼容不同級別車型,并根據需求調校出差異化的續航里程)打造而來的全球首款純電動SUV車型,其電氣化邁入全新的E3架構(圖1)階段,總線通信速率提升,控制域更清晰;E3架構屬于三域電子架構聯網系統,即3個中央控制單元:ICAS1(J533車輛控制器)、ICAS3(J794信息娛樂控制器)、ICAS2(智能駕駛控制器,目前還未采用,為L4級別車輛配備的);目前使用的是1.1版本,采用集中控制方式,控制單元集成化,通信速度更快,數量更少,算力更高。
2 中央控制單元ICAS
ICAS(車載應用程序服務器)是中央控制單元/服務器,它結合了大量的基本服務和車輛功能并控制其他車輛系統。客戶功能集中在服務/服務器層級,從而與外圍設備(傳感器和執行器)的功能分開。這意味著,不必由連接有傳感器的控制單元提供計算能力,而是由 ICAS 提供。因此,這類中央控制單元可以在多個診斷地址下作出響應,從而在將來減少了控制單元的數量。ICAS按照“分布式功能”原理,采用幾個控制單元負責一個功能。ICAS技術是實現自動駕駛和用于客戶車輛中軟件更新(計算機層級的車載測試儀和客戶功能)的前提條件,因此無需到訪維修站或不再需要汽車故障診斷儀。
2.1 ICAS1車輛控制器(J533)
ICAS1車輛控制器(J533)是位于數據總線診斷接口地址19下的微控制器(診斷),通常主要負責最多8個不同CAN消息的實現/鏡像。此外,中央控制單元還集成了負責大量其他功能的高性能微處理器(性能處理器),包括防盜鎖止系統、組件保護、防盜報警裝置、Kessy自適應/中央門鎖、調光、疲勞識別系統、歷史數據、駕駛模式選擇、續航里程計算、標準車外照明燈、離車方案、顯示協調器、時間周期、駐車協調器、低電壓電源管理系統、高電壓電源管理系統、高電壓充電管理、接線端控制、可訂購的功能主控制器等主控制器。在控制器本身層級上,此處理器還配備了2個用于MFL和AFS CAN的CAN收發器。為此,ICAS1車輛控制器(J533)再次在內部劃分為4個分區,每個分區都可以通過單獨的診斷地址(8123、8124、C002、C003)進行尋址。這些分區具有下述與車輛或客戶功能有關的任務。
(1)Adaptive系統1的應用程序服務器1(8123)。它為ICAS3的3個顯示器的服務器/CAN準備顯示數據、車輛定位(用于遠程服務和功能的位置)、控制充電管理服務器(用于充電程序、充電計時器、充電配置文件)和在線服務的消息存儲器。
(2)Java系統2的應用程序服務器1(8124)。它為車載測試儀(目前在此協調控制單元的升級程序)、診斷服務和車輛狀態數據服務器,控制車輛充電或溫度調節的遠程服務。
(3)嵌入式軟件集群1(C002)。它負責個性化管理、復雜車燈系統、動態車燈輔助系統、矩陣前照燈控制,具有為 ICAS3準備備份記錄和存儲功能的里程計數器。
(4)軟件集群內務1(C003)。它是性能處理器的“管家”,控制基礎設施和IP路由。
2.2 ICAS3信息娛樂控制器(J794)
ICAS3信息娛樂控制器(J794)主要側重于信息娛樂系統、車輛設置、診斷及導航服務,側重于互動體驗,通過不同的顏色、動態燈光信號給駕乘者提供操控狀態反饋。處理器分為 2個分區——5F、8125。
(1)信息娛樂系統電子裝置1(安全分區5F)是主要聯系人,并且在原則上包含應在啟動時盡快提供給客戶的所有功能:針對中央顯示屏、組合儀表(iID)和平視顯示器(HUD)的顯示控制系統(包括安全帶未系警示消息、電量表、保養周期顯示、消耗量),控制顯示語言,倒車攝像頭的視頻解碼,控制ID Light,控制音頻驅動程序(例如儀表板警告音、外置聲音放大器),車輛狀態和統計數據(行程計算機),診斷服務的服務器。
(2)信息娛樂系統的系統1應用程序服務器3(8215)是所謂的IVI或“車載信息娛樂系統”,它包括內存和計算密集型功能:導航系統,收音機/媒體、音頻管理、智能手機集成,觸摸操作、語音操作,互聯網、WLAN、USB接口,應用程序等。相比之下,它們需要更多的啟動運行時間。
除了CAN收發器之外,ICAS3還具有一個圖形處理器(GPU),該圖形處理器作為LVDS總線參與者的網關和處理器。
3 網線總線架構
傳統架構中主要以CAN協議傳輸數據,其中500 kbit/s的速率限制了MEB平臺車輛的發展。新的網絡總線架構,采用了“CAN+車載以太網”雙主干網線總線架構。9組CAN網絡,5組CAN FD(FD為可變的數據速率),通信速率最高可達2 Mbit/s,其余4組CAN網絡通信速率為500 kbit/s。以太網可配置不同的通信速率,在單對非屏蔽雙絞線上可實現從100 Mbit/s到最大1 Gbit/s的高速傳輸。
3.1 CAN FD總線
CAN FD總線是進一步開發的標準CAN協議。使用CAN FD的前提是在相應控制單元中安裝了新的 CAN FD收發器。與使用數據傳輸階段相比,在仲裁和確認階段采用了不同的數據速率。也就是說,它們必須在一條和同一條消息中將仲裁階段的“低”數據速率(500 kbit/s)在使用數據傳輸期間無縫切換到2 000 kbit/s的高速率。相反,這在過渡到確認階段時也是必要的。
通過在仲裁和確認期間保持500 kbit/s的數據速率,CAN總線的物理特性在很大程度上保持不變,例如信號電平、線路反射或終端電阻。與經典版CAN一樣,隱性電平保持在2.5 V,顯性電平保持在3.5 V(高)和1.5 V(低);在500 kbit/s的速度時,一個比特位的傳輸時間為 2 μs,在 2 Mbit/s時為500 ns(圖2)。
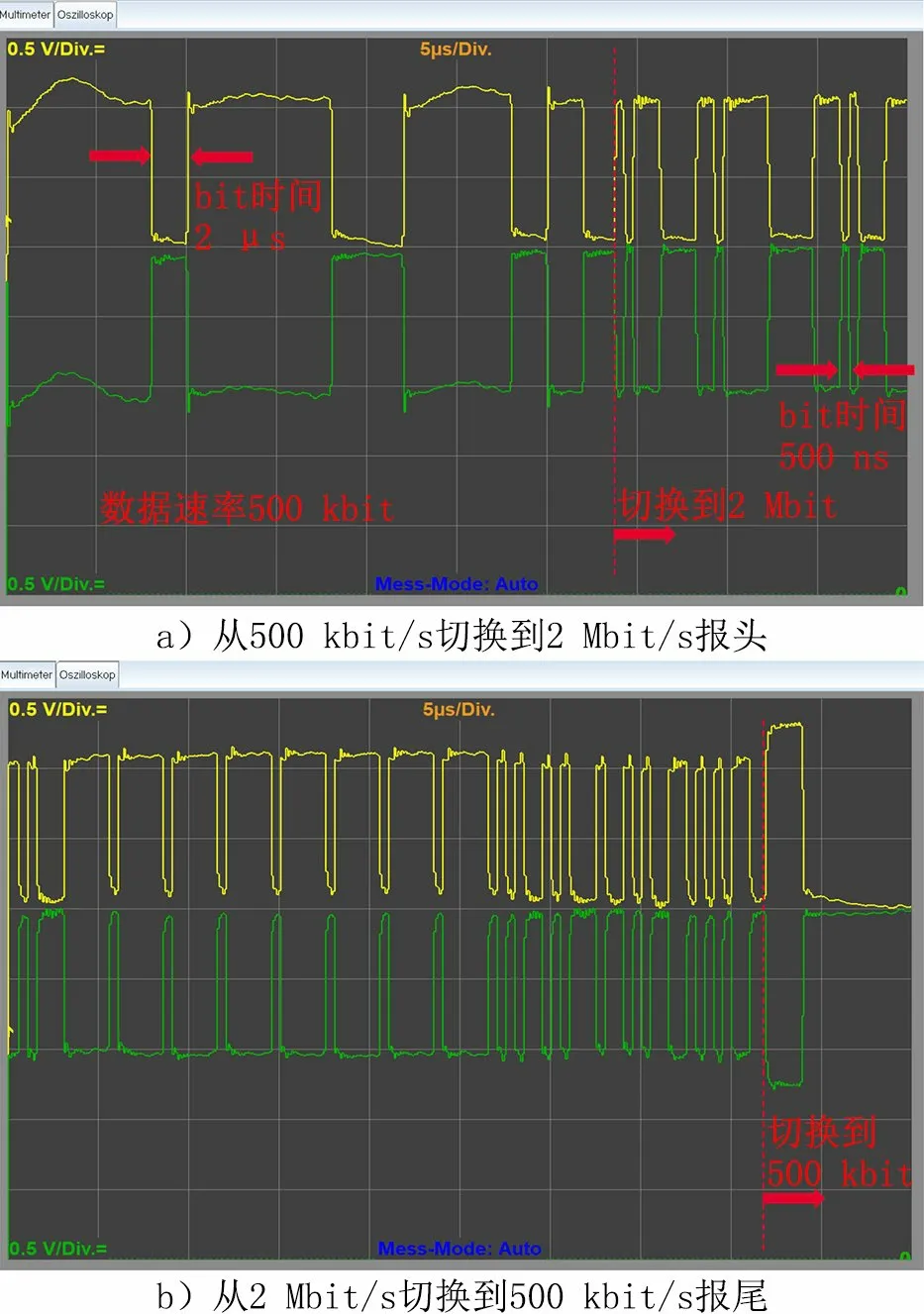
圖2 CAN FD總線波形物理特性(截屏)
因此當CAN FD總線系統導線短路、斷路或網關中出現故障,一樣可以結合CAN的物理特性進行故障診斷。出現不同故障時波形是不一樣的,可以通過測量波形進行故障診斷。當CAN-H和CAN-L波形重疊且為0 V時,說明2根線處于休眠狀態,無故障;當CAN-H和CAN-L波形重疊且為2.5 V左右時,診斷為線路互短故障(圖3);當其中一個波形采集出靠近0 V變化,另一個波形為0 V時,診斷為0 V總線對搭鐵短路(圖4和圖5);當其中一個波形采集出靠近蓄電池電壓變化,另一個波形為蓄電池電壓時,診斷為蓄電池電壓的波形對蓄電池電壓短路(圖6和圖7)。對于總線斷路故障,可以直接使用萬用表通過電阻法判斷導線通斷即可。
圖3 CAN-H和CAN-L互短(截屏)
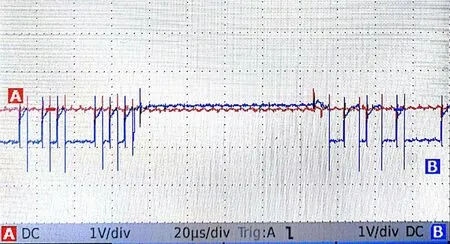
圖4 CAN-H對搭鐵短路(截屏)
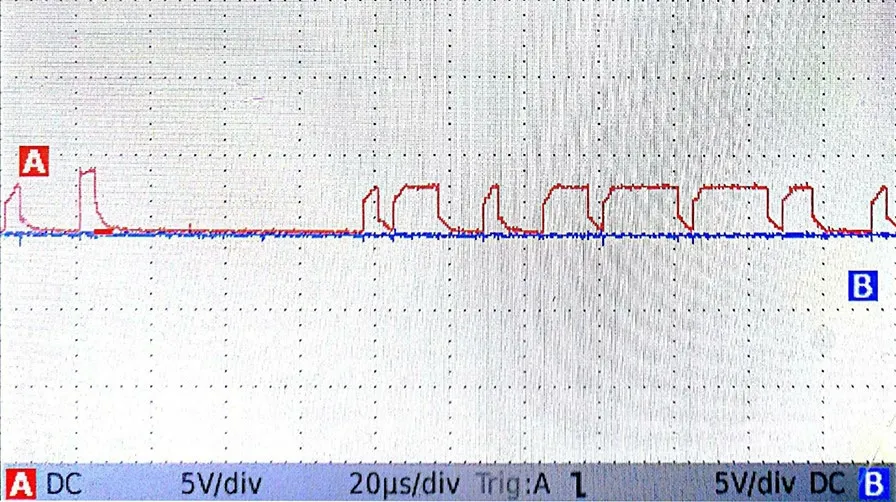
圖5 CAN-L對搭鐵短路(截屏)
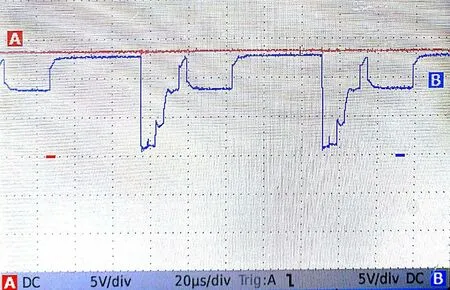
圖6 CAN-H對電源短路(截屏)
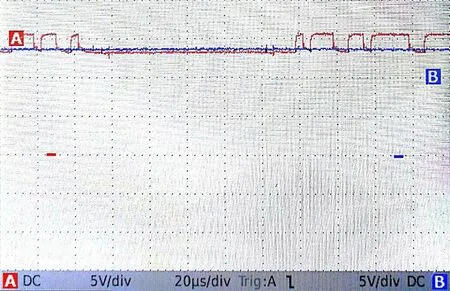
圖7 CAN-L對電源短路(截屏)
3.2 以太網
以太網是一項使用電纜連接的網絡技術,ICAS1中集成了以太網的主控單元,可實現從100 Mbit/s到最大1 Gbit/s的高速傳輸。針對以太網通信,OBD診斷接口重新分配了插針3、8、11、12 和13。如圖8所示,本車型采用了3種以太網連接類型。ICAS1與診斷接口之間通過2個沒有附加屏蔽層的雙絞線連接,可以實現同步雙向通信。ICAS1與ICAS3之間的導線帶有屏蔽層,具有啟用導線功能。
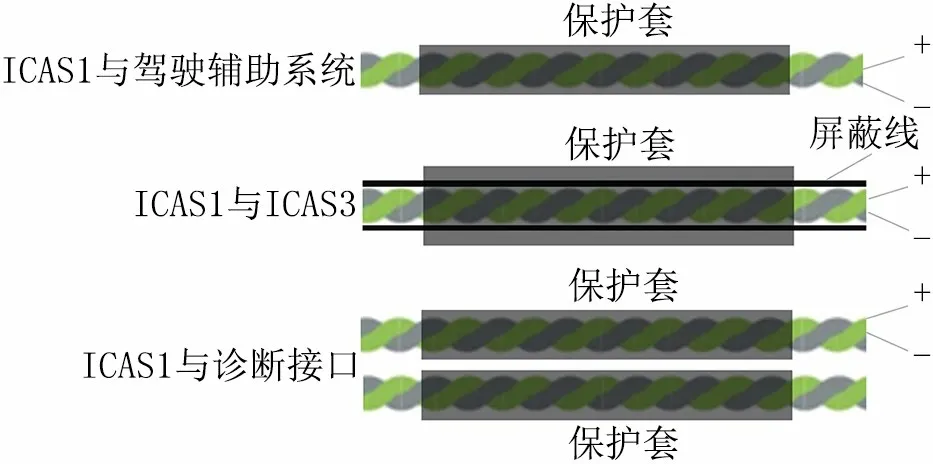
圖8 以太網連接類型
綜上所述,在厘清了大眾ID.4電氣聯網系統后,結合電路圖分析具體針腳定義就能進行車輛相關故障診斷與排除。當出現電氣故障時,可以通過多個控制單元無法通信來判斷是否為總控共性故障;再通過采集總線波形可進一步判斷是總線故障還是總供電或總搭鐵故障;再進一步通過萬用表測量電壓、電阻等方法進行線路判斷。如以上線路都沒問題,則更換控制單元或電氣組件。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20