能量受限無人機(jī)與移動(dòng)艦船通信中的軌跡優(yōu)化
2022-09-06 08:42:20張藝嚴(yán)馬巍李彬
中國艦船研究 2022年4期
張藝嚴(yán),馬巍,李彬*
1 四川大學(xué) 空天科學(xué)與工程學(xué)院,四川 成都 610065
2 航天神舟生物科技集團(tuán)有限公司,北京 100086
0 引 言
無人機(jī)(unmanned aerial vehicle,UAV)具有高機(jī)動(dòng)性、強(qiáng)視距(LoS)鏈路等優(yōu)點(diǎn),同時(shí)不受地理環(huán)境限制,在海上通信中擁有極大的性能優(yōu)勢(shì),可以執(zhí)行海上繪測(cè)、資源勘探、海難現(xiàn)場(chǎng)搜救、遠(yuǎn)距離視頻傳輸?shù)热蝿?wù)[1]。然而,由于無人機(jī)攜帶的能量有限,且傳遞的信息具有時(shí)效性,如何在無人機(jī)能量受限的情況下,將信息快速卸載到艦船成為當(dāng)前研究的一大挑戰(zhàn)。
目前采用無人機(jī)進(jìn)行海上輔助通信已經(jīng)得到了廣泛的應(yīng)用[2]。蔣冰等[3]總結(jié)了海上應(yīng)急通信的特點(diǎn),調(diào)研了國內(nèi)外現(xiàn)有海上應(yīng)急通信手段及其發(fā)展歷程,分析了中國在海上應(yīng)急通信方面的不足,分別從衛(wèi)星、無人機(jī)、艦船等方面討論了海上應(yīng)急通信系統(tǒng)的建設(shè)思路。芒戈等[4]提出了5G 場(chǎng)景下以艦船編隊(duì)為中心的無人機(jī)基站群組網(wǎng)的接入方案。隨著無人智能體研究的逐漸深入,無人機(jī)通信中軌跡規(guī)劃研究也成為一大熱點(diǎn)。對(duì)于無人機(jī)通信中的軌跡優(yōu)化,Zeng 等[5]研究了旋翼節(jié)能型無人機(jī)通信,考慮無人機(jī)的總能量消耗最小,為滿足多個(gè)地面用戶的通信吞吐量需求,利用凸優(yōu)化技術(shù)尋求最優(yōu)的懸停位置、持續(xù)時(shí)間、位置之間的訪問順序和速度。Huang 等[6]提出了一種無人機(jī)信息采集與傳輸?shù)能壽E優(yōu)化設(shè)計(jì)方案,在路徑增益、信道容量和小區(qū)覆蓋性能構(gòu)成的指標(biāo)集下使用凸優(yōu)化方法確定最優(yōu)路徑點(diǎn)。隨后根據(jù)生成的最優(yōu)路徑點(diǎn),使用運(yùn)動(dòng)規(guī)劃算法有效縮短了無人機(jī)執(zhí)行不同任務(wù)時(shí)的飛行時(shí)間。Wu 等[7]研究了多UAV 的無線通信系統(tǒng),采用多UAV 空中基站為地面用戶提供服務(wù),通過優(yōu)化多用戶通信的調(diào)度,將無人機(jī)軌跡和功率控制關(guān)聯(lián),最大化所有地面用戶的最小吞吐量。然而上述文獻(xiàn)只考慮了無人機(jī)平飛情況下的通信問題,并沒有對(duì)無人機(jī)的動(dòng)力學(xué)性能進(jìn)行深入分析研究。
近年來學(xué)者們開始關(guān)注艦船與無人機(jī)之間的通信問題。Ji 等[8]分析了艦對(duì)空數(shù)據(jù)鏈路通信模型和無人機(jī)對(duì)空干擾模型,提出了一種基于S-TK仿真軟件的通信對(duì)抗仿真方法,為無人機(jī)指揮員提供通信對(duì)抗決策依據(jù)。Tang 等[9]使用旋翼無人機(jī)進(jìn)行海上覆蓋增強(qiáng),采用非正交多址接入技術(shù),討論了聯(lián)合功率和傳輸持續(xù)時(shí)間分配問題,在考慮了船上通信能量限制的情況下,最大限度地提高船舶吞吐量。
現(xiàn)有文獻(xiàn)中的無人機(jī)通信場(chǎng)景通常采用旋翼無人機(jī),其特點(diǎn)是在固定位置上空懸停,可以進(jìn)行更靈活的軌跡設(shè)計(jì),但能量消耗更多。而固定翼無人機(jī)有更強(qiáng)的負(fù)載能力、更高的速度和更長的續(xù)航時(shí)間,但無法像旋翼無人機(jī)一樣懸停在空中。因此,旋翼無人機(jī)使用更靈活,固定翼無人機(jī)則更適用于長期通信或環(huán)境監(jiān)測(cè)。此外,固定翼無人機(jī)的飛行控制總體上更復(fù)雜,學(xué)者們普遍認(rèn)為固定翼無人機(jī)的軌跡規(guī)劃比旋翼無人機(jī)更具挑戰(zhàn)性[10]。在對(duì)無人機(jī)航跡建模時(shí),通常將無人機(jī)設(shè)定為固定高度,未考慮其完整的動(dòng)力學(xué)性能,在二維平面上進(jìn)行軌跡優(yōu)化,建立通用的位置、速度、加速度運(yùn)動(dòng)學(xué)模型。
針對(duì)無人機(jī)與艦船通信的場(chǎng)景,艦船在海面航行時(shí),受海浪和雷達(dá)等因素影響,艦船位置獲取精度偏低。因此在艦船位置信息存在誤差的條件下對(duì)無人機(jī)軌跡進(jìn)行優(yōu)化更貼合實(shí)際場(chǎng)景。為此,本文將采用固定翼無人機(jī)的三維動(dòng)力學(xué)模型,對(duì)無人機(jī)與存在位置信息誤差的艦船輔助通信過程中的無人機(jī)軌跡進(jìn)行優(yōu)化。將無人機(jī)的實(shí)際操縱力視為無人機(jī)動(dòng)力學(xué)模型的輸入。利用現(xiàn)代控制理論中的狀態(tài)空間模型概念,將無人機(jī)耗時(shí)最小化問題表述為受狀態(tài)約束的最優(yōu)控制問題,同時(shí)受到飛行速度、高度和飛行路徑角的實(shí)際約束。由于優(yōu)化變量和狀態(tài)約束本質(zhì)上都是無限維的,因此將提出基于hp 自適應(yīng)Radau 偽譜法的軌跡優(yōu)化方法,并通過仿真驗(yàn)證該方法的有效性。
1 系統(tǒng)模型
研究場(chǎng)景如圖1 所示,無人機(jī)在目標(biāo)點(diǎn)進(jìn)行數(shù)據(jù)采集后,返回艦船進(jìn)行數(shù)據(jù)卸載。艦船在海面航行時(shí),在海浪、雷達(dá)等因素影響下,其位置信息可能存在誤差。本文主要設(shè)計(jì)目標(biāo)是通過優(yōu)化能量受限無人機(jī)的軌跡來最小化無人機(jī)的任務(wù)時(shí)間,同時(shí)滿足無人機(jī)與艦船卸載的最小信息量,使無人機(jī)在能量消耗殆盡之前以最短時(shí)間前往岸邊充電樁進(jìn)行充電。

圖1 無人機(jī)與艦船通信場(chǎng)景Fig. 1 Communication scene between UAV and ship
1.1 固定翼無人機(jī)數(shù)學(xué)模型
忽略迎角、發(fā)動(dòng)機(jī)安裝角以及側(cè)滑力,將無人機(jī)速度、角速度和各外力的投影式通過坐標(biāo)系轉(zhuǎn)換,得到航跡坐標(biāo)系下的動(dòng)力學(xué)方程組[11]:
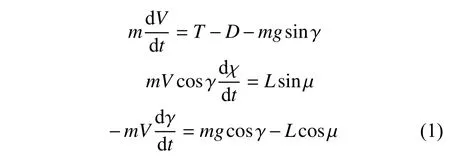
式中:V為無人機(jī)飛行速度; χ,γ分別為無人機(jī)飛行的偏航角和爬升角;T,D分別為無人機(jī)的推力與阻力;L為無人機(jī)升力; μ為滾轉(zhuǎn)角;m為無人機(jī)質(zhì)量;g為重力加速度常數(shù)。根據(jù)無人機(jī)空氣動(dòng)力學(xué)[10],考慮無人機(jī)低速飛行,阻力D=ρV2SCD0,其中 ρ為空氣密度,S為機(jī)翼面積,CD0為無人機(jī)零升阻力系數(shù)。
將飛行速度投影到地面坐標(biāo)系,通過坐標(biāo)系轉(zhuǎn)換,得到無人機(jī)空間位置隨時(shí)間的變換規(guī)律:
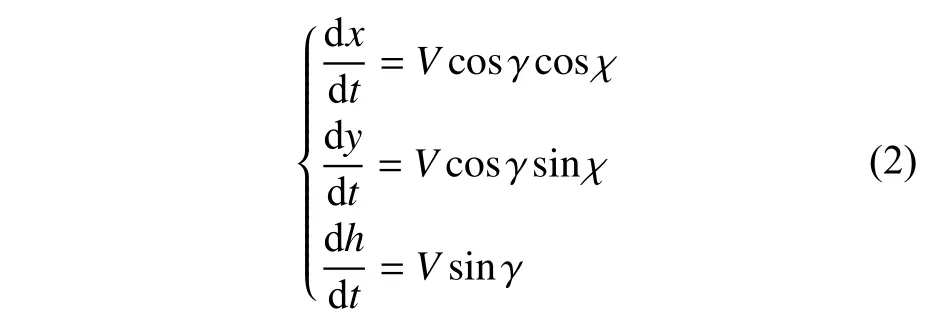
式中:q=[x,y]T,為無人機(jī)水平坐標(biāo);h為無人機(jī)飛行高度。
根據(jù)式(1)和式(2),建立如式(3)所示的固定翼無人機(jī)三維模型[12]。
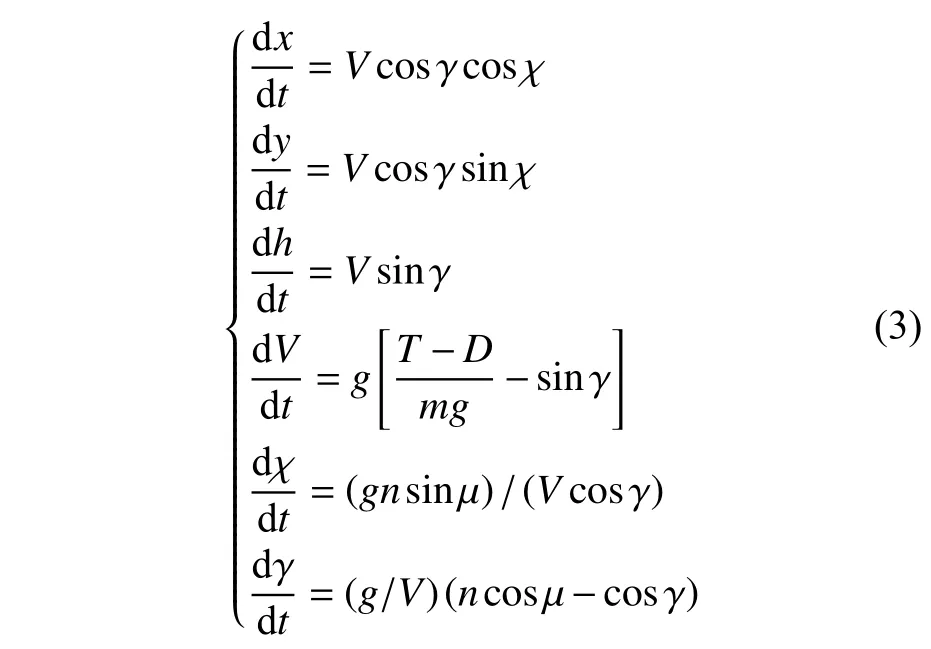
式中,n=L/mg,為無人機(jī)過載系數(shù)。
通過式(3)可以看出,固定翼無人機(jī)模型中存在很多分式,這使得其在求解問題中難以處理,為此做如下轉(zhuǎn)換,令


式中,u1,u2,u3分別為飛行加速度、偏航角變化率和爬升角變化率。這樣,系統(tǒng)實(shí)際控制量可以由u=[u1,u2,u3]T反推得到
通過式(3)和式(4),無人機(jī)飛行狀態(tài)和虛擬控制量x=[x,y,h,V,χ,γ]T,u=[u1,u2,u3]T,得到無人機(jī)的狀態(tài)空間表達(dá)式為

1.2 艦船運(yùn)動(dòng)模型和信道模型
實(shí)際情況下,艦船受到海浪等因素影響,難以得到艦船的準(zhǔn)確位置信息。為此,需要建立帶有坐標(biāo)估計(jì)誤差的信道模型。
為簡化處理,將艦船視為質(zhì)點(diǎn),通過運(yùn)動(dòng)學(xué)方程得到如式(7)所示的艦船運(yùn)動(dòng)模型[13]。
其中, ηp為誤差容限。這樣,可以得到

式中, ?為所有可能的G的集合,即半徑為 ηp的圓域。
式中:B為信道帶寬;S為平均信號(hào)功率;N為平均噪聲功率;S/N為信噪比(SNR),通常以分貝表示,分貝數(shù)轉(zhuǎn)換為1 0lg(S/N) dB。
假設(shè)時(shí)變信道遵循自由空間路徑損耗模型,無人機(jī)與艦船信道系數(shù)可以表示為

式中, β0為 參考距離d0=1 m處的信道功率。假設(shè)Pmax為無人機(jī)的最大傳輸功率,可得
結(jié)合無人機(jī)坐標(biāo)誤差,可以將無人機(jī)飛行過程中與艦船之間最差情況的總通信量表示為

式中,tf為無人機(jī)執(zhí)行任務(wù)的總時(shí)間。
1.3 能量模型
在與艦船進(jìn)行通信過程中,無人機(jī)應(yīng)在能量消耗殆盡前以最短時(shí)間前往岸上充電樁充電,因此需要建立無人機(jī)能量模型,確定無人機(jī)所能攜帶的最大能量。
無人機(jī)在飛行過程中主要受到4 個(gè)力的影響,即無人機(jī)發(fā)動(dòng)機(jī)所產(chǎn)生的推力T,受到空氣動(dòng)力與力矩影響產(chǎn)生的升力L與 阻力D,以及無人機(jī)包括機(jī)身以及所有負(fù)載在內(nèi)的重力mg。
由于固定翼無人機(jī)發(fā)動(dòng)機(jī)能耗遠(yuǎn)遠(yuǎn)大于通信所損失能量,因此,可以將能量模型表示為[15]

式中:x4為 無人機(jī)速度;x6為無人機(jī)爬升角。
2 問題建立
根據(jù)建立的固定翼無人機(jī)動(dòng)力學(xué)模型、信道模型、能量模型,進(jìn)一步考慮無人機(jī)的實(shí)際性能等約束條件,將無人機(jī)與移動(dòng)艦船通信中的軌跡優(yōu)化問題建模為一個(gè)帶有狀態(tài)約束的最優(yōu)控制問題。
2.1 問題約束
2.1.1 等式約束
考慮到無人機(jī)能量受限,需要前往岸邊充電樁進(jìn)行充電,因此為無人機(jī)添加如下終端等式約束:

式中: (xt f,yt f,ht f)為岸邊充電樁位置上空坐標(biāo),即
x(tf)y(tf)z(tf)無人機(jī)任務(wù)終點(diǎn); , , 為位置信息終端項(xiàng)。
2.1.2 不等式約束
考慮到無人機(jī)自身的性能問題以及安全問題,需要添加如式(16)所示的不等式約束。
根據(jù)無人機(jī)自身機(jī)動(dòng)性能的影響,需滿足最小速度Vmin以及最大速度Vmax,為保證無人機(jī)的安全,設(shè)置無人機(jī)最低安全高度為hmin, γmin和 γmax分別為無人機(jī)的最小爬升角和最大爬升角。無人機(jī)需要滿足的總通信量約束和自身最大可消耗能量約束可以寫為

為方便后續(xù)問題的建立,將式(16)和式(17)不等式約束統(tǒng)一表示為

2.1.3 控制量約束
對(duì)于無人機(jī)模型中的控制量,即無人機(jī)的加速度、偏航角變化率以及爬升角變化率,設(shè)置如式(19)所示的約束。

式中, [u1min,u2min,u3min]和 [u1max,u2max,u3max]分別為在飛行過程中無人機(jī)的加速度、偏航角變化率以及爬升角變化率的最小值和最大值。
2.2 問題描述
海域面積遼闊,無人機(jī)與艦船通信時(shí)需要對(duì)能量、時(shí)間等指標(biāo)進(jìn)行優(yōu)化,本文將能量作為約束,以最小化通信任務(wù)時(shí)間為目標(biāo),提出軌跡優(yōu)化方法。根據(jù)推導(dǎo)的無人機(jī)動(dòng)力學(xué)模型式(6)、信道模型式(13)、能量模型式(14)和2.1 節(jié)建立的約束,將所要解決的時(shí)間最小化軌跡規(guī)劃問題轉(zhuǎn)換為一個(gè)帶有等式約束和不等式約束的最優(yōu)控制問題P1。

式中:(x0,y0,h0) 為無人機(jī)的初始位置坐標(biāo);v0, χ0,γ0為無人機(jī)速度、航向角、爬升角的初始值。
3 hp 自適應(yīng)Radau 偽譜法
根據(jù)離散變量的不同,可以將直接求解最優(yōu)控制問題的方法分為3 類。第1 類方法只對(duì)控制量進(jìn)行離散,而狀態(tài)是連續(xù)的,將每步求得的控制變量對(duì)動(dòng)力學(xué)系統(tǒng)進(jìn)行積分來更新狀態(tài)和約束,如同控制參數(shù)化的方法一樣[13]。第2 類方法則同時(shí)離散狀態(tài)變量和控制變量,如配點(diǎn)法,將動(dòng)力學(xué)約束在一系列配點(diǎn)上進(jìn)行配置,用代數(shù)約束取代微分約束[16]。第3 類方法是只離散狀態(tài)變量的微分包含法,通過求解部分狀態(tài)方程消除控制變量,并將剩余的狀態(tài)方程進(jìn)行離散,優(yōu)化變量則只剩下狀態(tài)變量序列。偽譜法是配點(diǎn)法中的一種,通過使用數(shù)值微分來近似導(dǎo)數(shù)項(xiàng),并基于Lagrange 插值全局近似或者局部近似[17];而普通配點(diǎn)法采用數(shù)值積分或有限差分法得到微分方程。本文采用基于hp 自適應(yīng)Radau 偽譜法的求解方法,該方法具有收斂域?qū)挕⑶蠼馑俣瓤欤也粫?huì)對(duì)初值估計(jì)過度依賴等優(yōu)點(diǎn)[18]。
3.1 Radau 偽譜法
Radau 偽譜法是一種正交配置方法,與Gauss偽譜法或Lobatto 偽譜法相比,其在區(qū)間切換點(diǎn)的狀態(tài)變量連續(xù)性條件x()=x()的實(shí)現(xiàn)上更具優(yōu)勢(shì)[19]。Radau 偽譜法在Legendre-Gauss-Radau(LGR)配置點(diǎn)上的每個(gè)網(wǎng)格區(qū)間中離散狀態(tài)和控制變量,從而將動(dòng)態(tài)方程轉(zhuǎn)換為代數(shù)約束,將原始問題轉(zhuǎn)化為非線性規(guī)劃問題(NLP)。具體步驟如下:
1)時(shí)間區(qū)間轉(zhuǎn)換。通過將無人機(jī)飛行任務(wù)中所需要的通信時(shí)間t∈[t0,tf],分為N份網(wǎng)格區(qū)間 [tn-1,tn),n=1,2,···,N,其中tN=tf。那么,在每個(gè)網(wǎng)格區(qū)間內(nèi),時(shí)間都可以由 ζ ∈[-1,1)表示:

2) LGR 配點(diǎn)選擇。在每個(gè)網(wǎng)格區(qū)間內(nèi)選,通過求解下列Kn階勒讓德方程得到配點(diǎn)

其中,

3) 狀態(tài)和控制變量離散化。額外增加ζ=1的配點(diǎn),代表每個(gè)網(wǎng)格區(qū)間的狀態(tài)終端值。通過Lagrange 多項(xiàng)式對(duì)連續(xù)的狀態(tài)和控制量進(jìn)行插值近似離散化,可得
式中:xn(ζ),un(ζ)為 連續(xù)的狀態(tài)和控制量;Xn(ζ)和Un(ζ)為 離散后的狀態(tài)和控制量;Li(ζ)為Lagrange多項(xiàng)式基式。
4) 動(dòng)態(tài)方程轉(zhuǎn)換。由式(24),狀態(tài)變量對(duì) ζ的導(dǎo)數(shù)為

進(jìn)而,式(6)的狀態(tài)空間表達(dá)式可以轉(zhuǎn)化為如式(26)所示的代數(shù)約束。
5) 約束近似化。首先將問題P1中的等式約束W以及不等式約束ga表示為

代入近似后的狀態(tài)以及控制量,約束可以近似為
經(jīng)過上述步驟,將無人機(jī)執(zhí)行任務(wù)時(shí)間最小化的軌跡優(yōu)化問題轉(zhuǎn)化為一個(gè)非線性規(guī)劃問題,從而可以通過基于梯度的非線性規(guī)劃求解器來提高計(jì)算效率。
3.2 hp 網(wǎng)絡(luò)更新策略
基于上述步驟,對(duì)連續(xù)時(shí)間變量進(jìn)行插值離散近似,還需評(píng)估離散化后的誤差。在第n個(gè)時(shí)間區(qū)間內(nèi)選取每2 個(gè)配點(diǎn)的中心位置,即
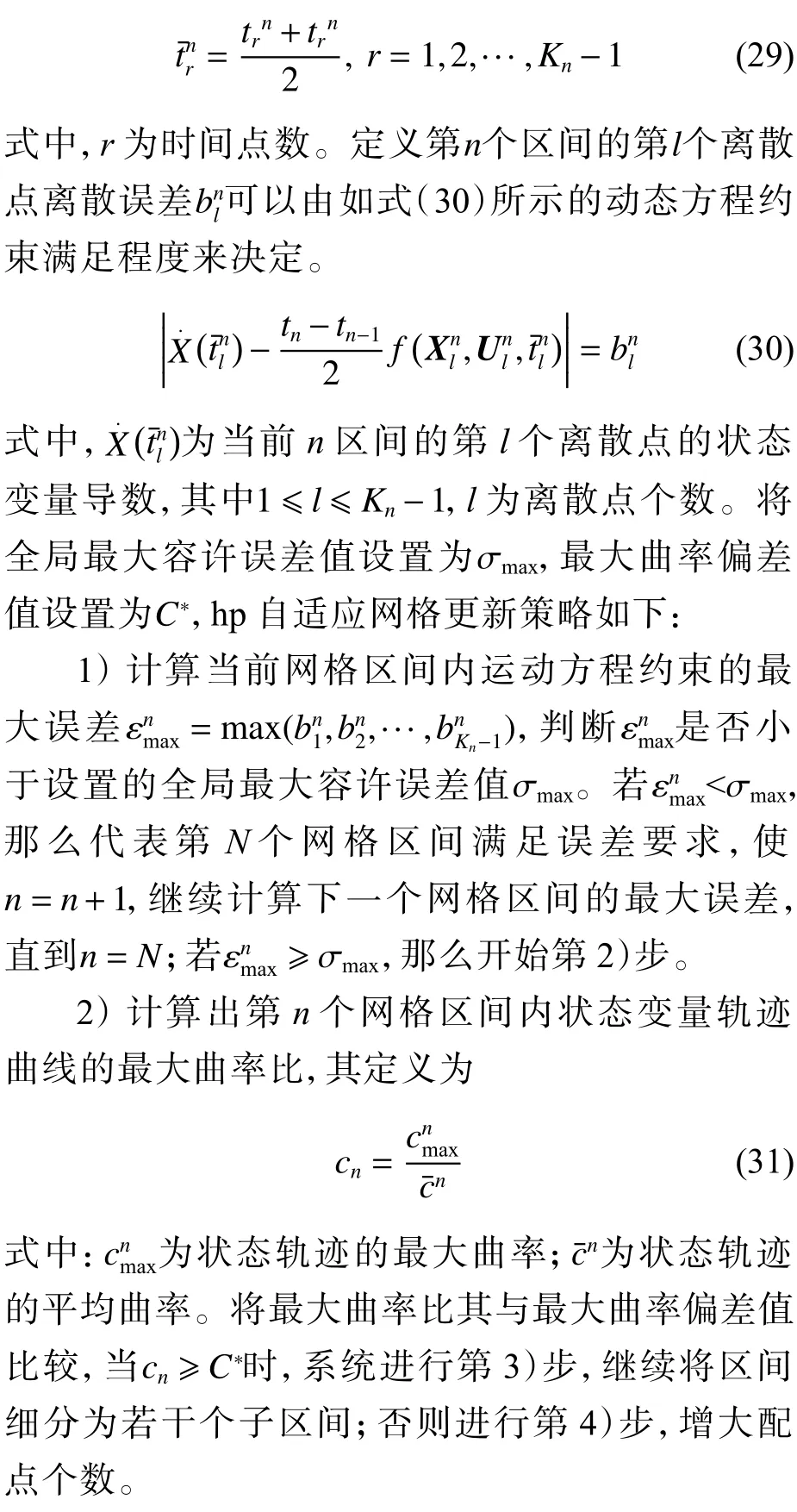
3) 繼續(xù)細(xì)分網(wǎng)格區(qū)間,其子區(qū)間個(gè)數(shù)為Ir:

式中:ceil(α)為 在 α增 大的方向取整; τ為定義的誤差閾值。令r=r+1,返回第1)步。
4) 增大網(wǎng)格區(qū)間內(nèi)的配點(diǎn)個(gè)數(shù)Kn,新的配點(diǎn)個(gè)數(shù)為

令n=n+1,返回第1)步。
將基于hp 自適應(yīng)Radau 偽譜法的算法流程總結(jié)如下:
步驟1) 初始化配點(diǎn)個(gè)數(shù)及網(wǎng)格區(qū)間數(shù)為K0。
步驟2) 應(yīng)用SQP 算法求解Radau 偽譜法轉(zhuǎn)化后的非線性規(guī)劃問題。
步驟3) 計(jì)算每個(gè)網(wǎng)格區(qū)間的誤差矩陣 ε,判斷其是否超過閾值 σmax, 如果超過 σmax,則轉(zhuǎn)至步驟 4);如果每個(gè)網(wǎng)格區(qū)間誤差 ε都小于閾值,則結(jié)束求解,輸出最優(yōu)解,算法流程結(jié)束。
步驟4) 計(jì)算當(dāng)前網(wǎng)格區(qū)間平均曲率cˉn,與最大曲率偏差值比較,若cn≥C*,則根據(jù)式(32) 繼續(xù)細(xì)分該網(wǎng)格,否則按照式(33) 增加該區(qū)間配點(diǎn)數(shù);所有網(wǎng)格更新后返回步驟2)。
4 數(shù)值仿真
本文采用的是固定翼無人機(jī),其相關(guān)參數(shù)如表1 所示[20]。
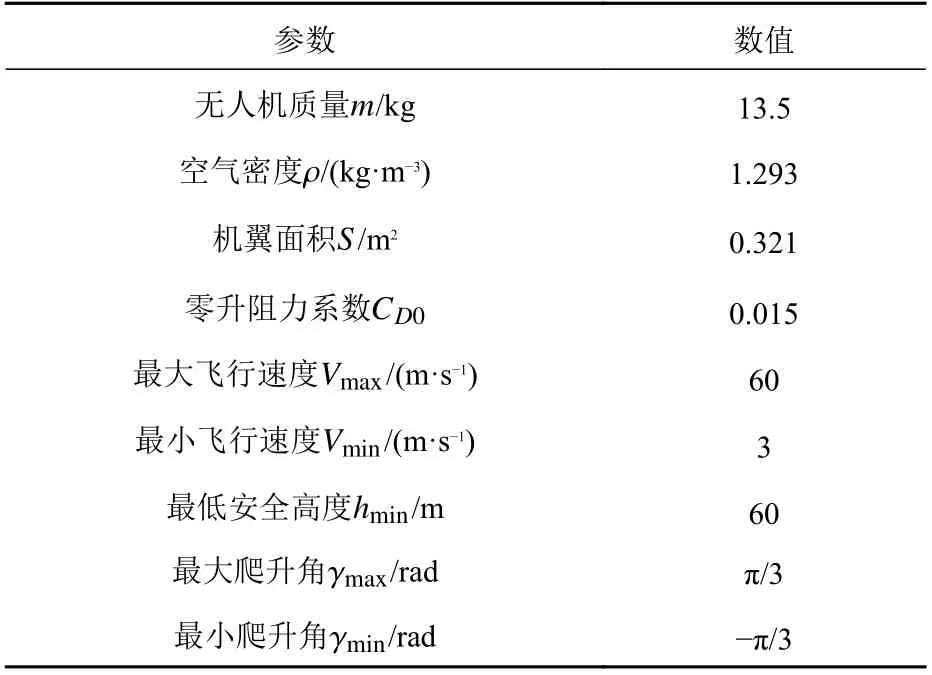
表1 固定翼無人機(jī)參數(shù)Table 1 Parameters of fixed-wing UAV
設(shè)置通信帶寬B=1 MHz,對(duì)應(yīng)的噪聲功率σ2=N0B=-110 dBm,假設(shè)無人機(jī)的傳輸功率P=10 dBm, 并且參考信道功率 β0=-50 dB,因此可以得到無人機(jī)信噪比 為30 dB,假設(shè)坐標(biāo)誤差為η=40。
假設(shè)無人機(jī)初始位置為(0 m,0 m,100 m),終點(diǎn)岸上充電樁位置為(1 000 m,1 000 m,100 m)。艦船初始位置為(0 m,1 000 m,0 m),速度Vp=6 m/s, 航向角 θ=0,即考慮其勻速直線運(yùn)動(dòng)。本文考慮5 個(gè)場(chǎng)景:無能量約束的時(shí)間最小化場(chǎng)景(圖2),帶能量約束的時(shí)間最小化場(chǎng)景(圖3),考慮更多通信吞吐量的帶能量約束時(shí)間最小化場(chǎng)景(圖4~圖6),二維與三維優(yōu)化對(duì)比場(chǎng)景(圖7 和表2),hp 自適應(yīng)Radau 偽譜法與p 偽譜法效果對(duì)比場(chǎng)景(表3)。
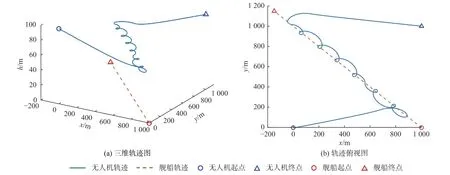
圖2 場(chǎng)景1:無能量約束最小吞吐量800 Mbit 時(shí)無人機(jī)與艦船軌跡Fig. 2 Scene one: UAV and ship trajectory with a minimum throughput of 800 Mbit without energy constraints
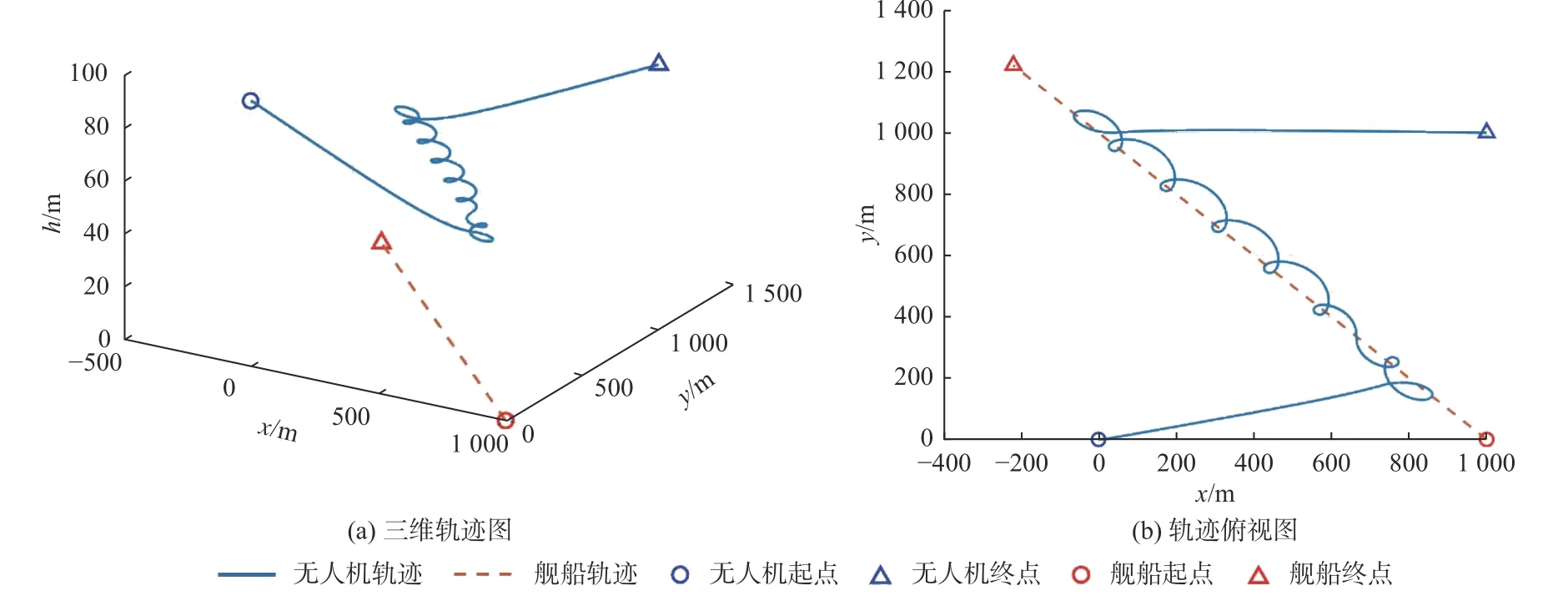
圖3 場(chǎng)景2:帶能量約束最小吞吐量800 Mbit 時(shí)無人機(jī)與艦船軌跡Fig. 3 Scene two: UAV and ship trajectory with a minimum throughput of 800 Mbit and energy constraints
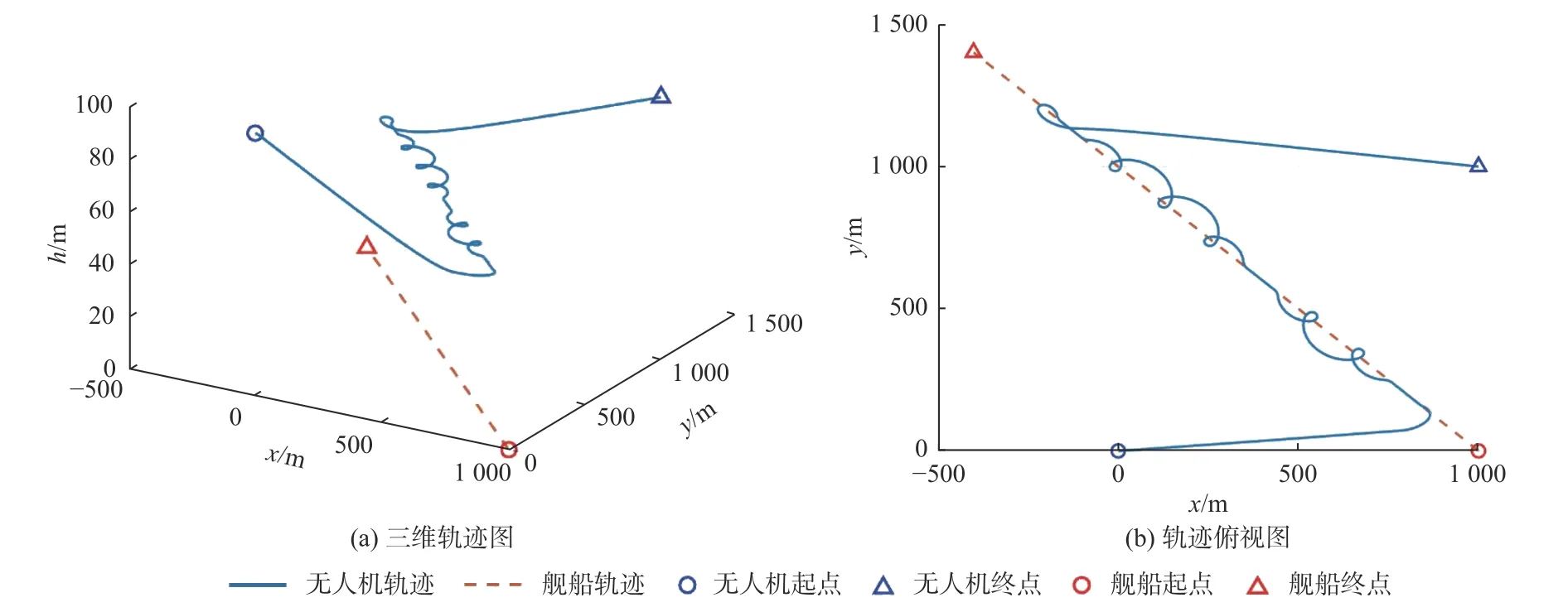
圖4 場(chǎng)景3:帶能量約束最小吞吐量1 000 Mbit 時(shí)無人機(jī)與艦船軌跡Fig. 4 Scene three: UAV and ship trajectory with a minimum throughput of 1 000 Mbit and energy constraints
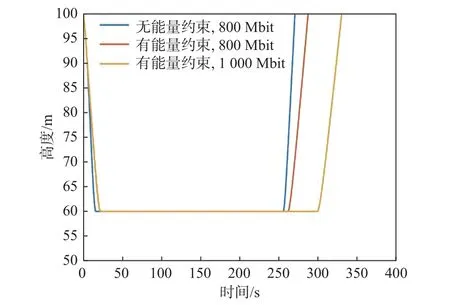
圖5 無人機(jī)飛行高度變化曲線Fig. 5 Flying height variation curve of UAV
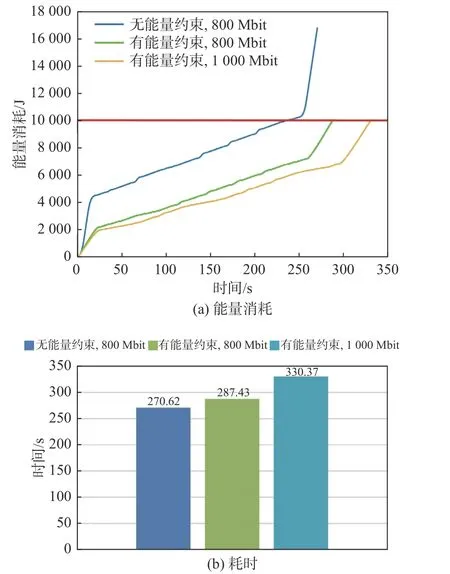
圖6 無人機(jī)與艦船通信的能量消耗與耗時(shí)Fig. 6 Energy and time consumption for communication between UAV and ship
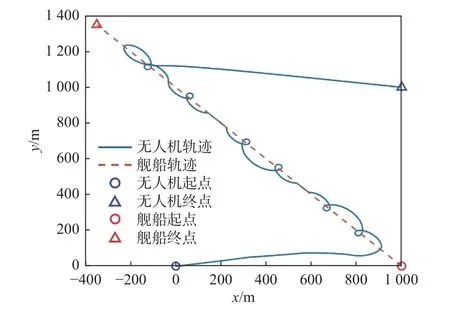
圖7 場(chǎng)景4:帶能量約束最小吞吐量800 Mbit 無人機(jī)二維飛行與艦船軌跡Fig. 7 Scene four: UAV 2D flight and ship trajectory with a minimum throughput of 800 Mbit and energy constraints
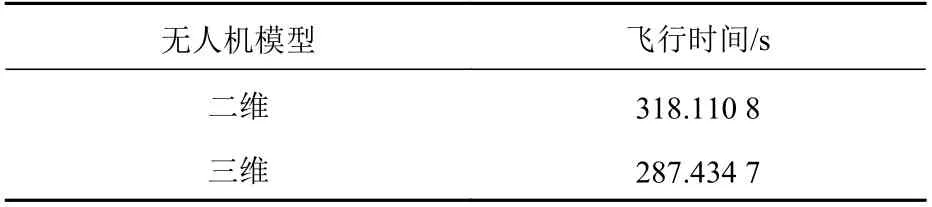
表2 無人機(jī)二維飛行與三維飛行時(shí)間對(duì)比Table 2 Comparison of 2D and 3D flight time of UAV
場(chǎng)景1:不考慮無人機(jī)的能量限制,假設(shè)無人機(jī)與艦船之間的最小總吞吐量為800 Mbit,無人機(jī)與艦船軌跡如圖2 所示。無人機(jī)可以從起點(diǎn)飛往終點(diǎn),在通信過程中可以很好地跟隨移動(dòng)艦船的軌跡進(jìn)行通信。不難看出,為了在優(yōu)化的同時(shí)滿足與艦船之間的最小通信吞吐量,無人機(jī)從起點(diǎn)出發(fā),首先快速接近目標(biāo)點(diǎn),隨后沿著艦船行駛軌跡進(jìn)行通信。由于無人機(jī)速度比艦船速度快,無人機(jī)會(huì)在移動(dòng)艦船的上空進(jìn)行盤旋通信,在完成通信任務(wù)量的同時(shí)快速前往岸上充電樁。通過無人機(jī)信道模型式(13)可以發(fā)現(xiàn),無人機(jī)與艦船之間的距離越近,通信速率越大。與旋翼無人機(jī)不同,固定翼無人機(jī)無法懸停,所以采用盤旋方式與艦船進(jìn)行通信。
場(chǎng)景2:考慮無人機(jī)的能量限制,假設(shè)無人機(jī)所能攜帶的最大能量為10 000 J,無人機(jī)與艦船之間的最小總吞吐量仍為800 Mbit,無人機(jī)與艦船軌跡如圖3 所示。無人機(jī)仍舊可以從起點(diǎn)飛往終點(diǎn),但為了節(jié)省能量消耗,軌跡與場(chǎng)景1 有所不同。通過對(duì)比圖2(b)與圖3(b)可以發(fā)現(xiàn),當(dāng)限制無人機(jī)的能量消耗后,無人機(jī)的軌跡盤旋曲線更加平穩(wěn),不會(huì)出現(xiàn)急轉(zhuǎn)彎的情況,角度也不會(huì)短時(shí)間內(nèi)發(fā)生劇烈變化,這樣的飛行方式使無人機(jī)在與艦船通信的過程中更加節(jié)省能量。
場(chǎng)景3:無人機(jī)與艦船之間通信的最小吞吐量增加至1 000 Mbit,兩者的通信軌跡如圖4 所示。無人機(jī)仍可以從起點(diǎn)飛往終點(diǎn),但是其軌跡與場(chǎng)景1 和場(chǎng)景2 有顯著不同。可以看到,無人機(jī)與艦船的軌跡有一段重合。這是因?yàn)殡m然相比場(chǎng)景2 僅僅增加了最小吞吐量,但是無人機(jī)最大能耗沒有改變;為了保證無人機(jī)自身的能量消耗,其會(huì)以一個(gè)較低的速度跟隨艦船通信,并減少盤旋所帶來的能量消耗;與場(chǎng)景2 相比,其代價(jià)是增加了與艦船通信任務(wù)的耗時(shí)。
場(chǎng)景1~場(chǎng)景3 的無人機(jī)在與艦船通信過程中的高度變化如圖5 所示,可以發(fā)現(xiàn),無人機(jī)在任務(wù)開始時(shí)都會(huì)快速下降到最低高度。這與所建立的信道模型相符,因?yàn)榕灤挥诤C妫叨仍降停嚯x艦船越近,通信效率也會(huì)越高,可以大幅度減少通信耗時(shí)。
圖6 為場(chǎng)景1~場(chǎng)景3 的無人機(jī)與艦船通信過程中的能耗與時(shí)間對(duì)比圖,圖中紅色橫線為設(shè)置的約束條件。在無能量約束情況下,無人機(jī)的能耗最高,但耗時(shí)最短。在增加能量約束后,隨著與艦船之間最小吞吐量的增加,無人機(jī)與艦船通信的耗時(shí)會(huì)隨之增多,這是因?yàn)闊o人機(jī)需要耗費(fèi)更多時(shí)間在艦船上方進(jìn)行通信。而在增大最小吞吐量后,為同時(shí)考慮能量限制,任務(wù)耗時(shí)會(huì)明顯增加。通過上述3 個(gè)場(chǎng)景的研究,本文方法為有能量限制的無人機(jī)與艦船通信任務(wù)時(shí)間最小化軌跡優(yōu)化問題提供了一個(gè)有效的解決方案。
場(chǎng)景4:研究無人機(jī)的三維運(yùn)動(dòng)軌跡,將無人機(jī)二維模型與三維模型的飛行軌跡進(jìn)行對(duì)比。圖7 所示為無人機(jī)高度固定在100 m 與海上移動(dòng)艦船通信時(shí)的飛行軌跡,表2 給出了在最小通信總吞吐量800 Mbit,能量限制為10 000 J 情況下無人機(jī)通信任務(wù)的耗時(shí)。可以看到,無人機(jī)三維飛行耗時(shí)更短。這一實(shí)驗(yàn)結(jié)果表明,固定翼無人機(jī)的時(shí)間最小化軌跡通常是三維的。
場(chǎng)景5:采用hp 自適應(yīng)Radau 偽譜法進(jìn)行求解,并與p 偽譜法結(jié)果對(duì)比。相比于本文方法的更新策略,p 偽譜法不會(huì)根據(jù)每次求得的狀態(tài)變量軌跡曲線的最大曲率比選擇不同策略,而是在每次誤差不滿足要求時(shí),直接選擇細(xì)分網(wǎng)格區(qū)間,通過不斷增加區(qū)間個(gè)數(shù),將問題最終收斂到一個(gè)局部最優(yōu)解。假設(shè)無人機(jī)與艦船之間的最小總吞吐量為800 Mbit,且最大攜帶能量為10 000 J,表3 給出了2 種方法優(yōu)化得到的飛行時(shí)間和迭代次數(shù)。可以發(fā)現(xiàn),本文方法得到的飛行時(shí)間僅略高于p 偽譜法幾秒,但在迭代次數(shù)上遠(yuǎn)遠(yuǎn)小于p 偽譜法,大大節(jié)省了求解時(shí)間。
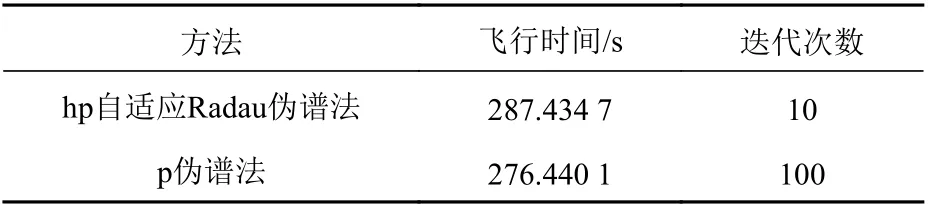
表3 不同方法飛行時(shí)間與迭代次數(shù)對(duì)比Table 3 Comparison of flight time and iteration times of different methods
5 結(jié) 語
本文研究了具有能量限制的固定翼無人機(jī)與艦船三維通信場(chǎng)景,考慮到海面眾多因素導(dǎo)致艦船坐標(biāo)的不確定性,討論了無人機(jī)與存在坐標(biāo)估計(jì)誤差的移動(dòng)艦船的通信問題,并選取無人機(jī)通信任務(wù)時(shí)間作為優(yōu)化目標(biāo),優(yōu)化無人機(jī)與移動(dòng)艦船通信中的三維軌跡。與大多數(shù)現(xiàn)有設(shè)計(jì)不同之處在于,由于引入了無人機(jī)的動(dòng)力學(xué)性能,本文方法同時(shí)優(yōu)化了無人機(jī)的軌跡和控制輸入。因此,采用本文方法優(yōu)化的軌跡在實(shí)際應(yīng)用中更易跟蹤。但要解決該最優(yōu)控制問題,仍存在許多挑戰(zhàn),為此采用hp 自適應(yīng)偽譜法將無人機(jī)通信中的軌跡優(yōu)化問題轉(zhuǎn)換為非線性規(guī)劃問題。通過仿真實(shí)驗(yàn)驗(yàn)證,無人機(jī)在滿足自身能量約束與飛行性能約束的情況下,可以滿足海上移動(dòng)艦船與無人機(jī)之間的最小通信總吞吐量,說明本文方法可以有效解決有能量限制的無人機(jī)與艦船通信任務(wù)時(shí)間最小化軌跡優(yōu)化問題,為海上通信系統(tǒng)提供有效的解決方案。
現(xiàn)有固定翼無人機(jī)動(dòng)力學(xué)數(shù)學(xué)模型的研究主要集中在三自由度質(zhì)點(diǎn)模型方面,這對(duì)于實(shí)際無人機(jī)來說不夠精確。在后續(xù)研究中,可以對(duì)六自由度剛體模型進(jìn)行深入研究。此外,本文考慮的場(chǎng)景為單無人機(jī)與單艦通信場(chǎng)景,未來可以對(duì)多無人機(jī)群或艦隊(duì)通信場(chǎng)景作進(jìn)一步研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03