面向自動駕駛的高精度地圖模型研究
2022-09-06 07:45:14馮雪
科技創新導報 2022年12期
馮雪
(北京美大智達科技有限公司 北京 100101)
1 高精度地圖的概念
與傳統導航電子地圖相比,高精度地圖具有兩個十分重要的特點:第一個特點是精度高,也就是地圖的絕對位置精度高;第二個特點是要素全面,也就是說,地圖所包含的信息內容更豐富,刻畫得更細致。
高精度地圖面向高度自動化的自動駕駛,其服務對象是更為廣泛的智能體或者智能機器。地圖的絕對精度優于1m,相對精度為10~20cm。高精度地圖含有非常豐富的地圖信息[1]。比如,增加了詳細的與車道相關的數據(如車道、車道邊界、車道中心線和車道限制信息等)、目標數據(如道路邊緣目標、防護欄、路邊的地標等)及更詳細的行駛導引。除了提供基本的道路導航功能外,高精度地圖可以恢復實際的道路場景,并協助車輛實現車道級別的高精度定位、規劃和決策。
2 面向自動駕駛的高精度地圖面臨的挑戰
面向自動駕駛的高精度地圖面臨的諸多挑戰,具體可以概括為:(1)數據結構復雜,需要在傳統導航電子地圖數據內容基礎上豐富地圖要素;(2)地圖格式缺乏統一的表達,需要整合現有地圖要素樣式進行一致性表達;(3)地圖數據只針對特定的場景,需要修改地圖數據提高適應性表達;(4)缺乏面向自動駕駛商用地圖的編輯器或軟件,需要地圖廠商或者相關機構來補充[2]。圖1中展示的是兩個不同的機構對路段表達的情況,通過對比可以看出,不同的機構對高精度地圖的幾何表達有很多不一致的地方。

圖1 兩個路段表達格式不統一
3 智能精細地圖模型
本文提出了面向自動駕駛的高精度地圖模型,稱之為智能精細地圖模型。本文認為智能精細模型是面向自動駕駛以智能導引為目的,動態關聯道路上各種信息,全面反映位置本身及其與所在道路相關的各種特征、事件或事物的數字精細化地圖模型[3]。
在現有導航電子地圖的基礎上,本文提出了一種智能精細模型,并將智能精細地圖模型分為4層,即道路層、廣義POI 層、動態感知目標層和行駛信息輔助層,如圖2所示。
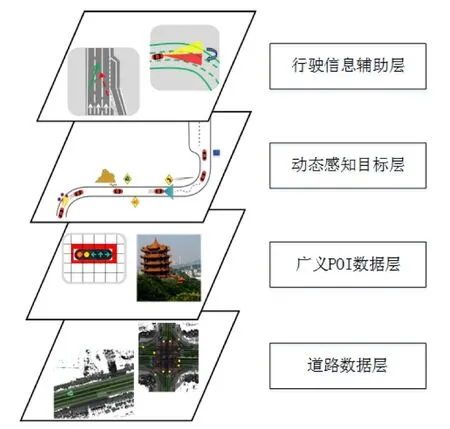
圖2 智能精細模型結構
道路層又分成兩種,路段層、車道層及這兩層之間的拓撲關系。分段的依據是行駛車道的變更,而不是通行方向上的物理分割。在本文提出的模型中,為了降低模型的復雜性,本文不再對動態的實時交通信息單獨劃分層,而是把實時交通信息作為屬性添加到地圖的道路層中。路段層包含的內容除了靜態的物理屬性信息外,還有動態的交通信息屬性。車道層繼承了路段的部分屬性,也有自己特殊的屬性[4]。
廣義POI層從內容上不僅包括現有的導航電子地圖中的9個大類POI數據,還新增輔助自動駕駛的地理位置標簽的類型,同時,屬性上增加地理位置標簽的特征信息。動態感知目標層包括無人車動態感知目標和預測目標。
行駛信息輔助層是指考慮了道路層信息、廣義的POI 信息、動態感知目標信息等為無人車提供了行駛導引信息,包括強制行駛行為、建議行駛行為、行駛的方向和從道路層中調度行駛的路徑等內容。由于該層數據內容過于復雜,且涉及自動駕駛中的決策和規劃內容,對此本文不做深入探討。
4 智能精細地圖的車道級路網模型
智能精細地圖支持車道級的路徑規劃和定位導航,智能精細地圖的路網數據模型應準確反映道路環境[5]。以下將闡述智能精細地圖中車道級路網的要求。
4.1 具有完整的結構層級關系
根據自動駕駛不同功能對路網數據內容及尺度的不同要求,從垂直方向上進行分層抽象,將路網模型劃分為道路網絡層、車道網絡層。道路網絡層的最小建模單元為路段,車道網絡層的最小建模單元是車道[6]。圖3為將真實世界按照不同尺度進行道路網絡層與車道網絡層的幾何數據抽象的示意圖。
道路區間指的是連接兩個路口或道路交叉口之間的完整路段,而在傳統基于道路的拓撲網中,與道路區間對應的是兩個Node(節點)之間的Link(連線)(見圖3b)。在高精度導航地圖中,道路區間包含1個或者多個車道(見圖3c),成為一個區間,所以不能由一條線來表示。在傳統導航地圖中,路口一般簡化為Node 表示,而在高精度導航地圖中,路口是非常重要的研究對象,將具體描述與道路區間之間的車道接續關系及中心點位置等。每一條道路區間最多對應兩個路口區域,而每一個路口區域可以對應多個道路區間。以道路區間和路口區域為基本管理單元,是對道路環境的真實描述,可以表達車道間的拓撲關系。
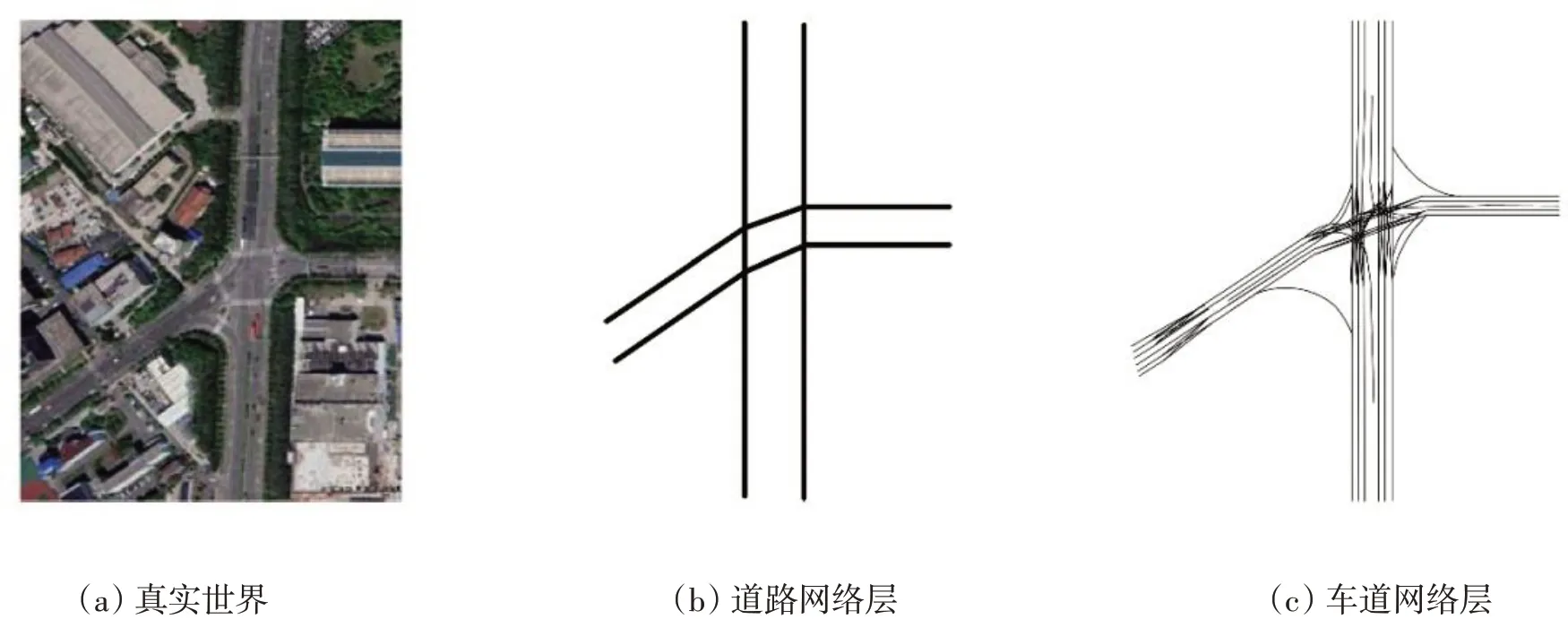
圖3 真實世界的道路網絡層與車道網絡層的抽象
4.2 完善的層與層之間的對應關系
傳統導航電子地圖是根據物理間隔進行路段或者車道的抽象和編號,這個規則不滿足高度自動化的自動行駛。路段或者車道中的屬性引起變化對汽車的控制尤其對橫向控制帶來直接影響,橫向控制決定了無人車的行駛性能。圖4顯示幾種路段屬性變化導致無人車的控制行為需要發生變化的情況,圖中線條為車道邊界線,箭頭線表示道路的通行方向,方框為屬性變化點,其中:(a)為自動駕駛必須換道點;(b)為自動駕駛可換道點;(c)為自動駕駛路徑轉彎半徑變化點。在對車道進行抽象時,需要考慮交通規則或者駕駛行為對無人車的影響。因此,本文選擇路段上屬性變化的位置作為車道分段抽象的依據,而且屬性變化的位置不是一個具體的固定不變的點值,是連續變化的區間。
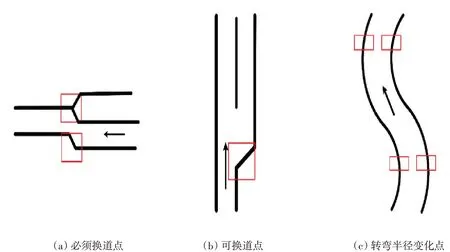
圖4 路段屬性變化點對自動駕駛的影響的例子
5 基于移動測量車的高精度地圖數據采集及制作
基于采集車的高精度地圖的生成流程可以分為3個步驟。首先,利用GNSS/INS 數據進行融合,獲取地圖采集車的高精度位置坐標及高精度的航向信息,同時,獲取地圖采集車行駛的軌跡點、車載傳感器的位置坐標。其次,利用車載相機拍攝道路圖像數據,利用機器學習算法對圖像數據進行分類,獲取圖像上的道路、車道線、道路標志等語義信息;同時,利用車載激光雷達獲取地面目標的激光點云信息,從激光點云信息中提取目標的語義和相對坐標信息。最后,將圖像或者點云提出來的信息與位置數據進行融合,獲取道路要素的位置、幾何、語義信息,從而創建車道級高精度地圖。其流程如圖5所示。

圖5 高精度地圖采集流程圖
6 結語
隨著人工智能技術和測繪遙感技術的快速發展,自動駕駛已成為當前智能交通和自動駕駛產業發展的熱門方向。測繪遙感學科與車輛自動化控制、計算機視覺等學科的交叉融合,推動了自動駕駛的發展,提高了無人車的安全性和穩定性。面向自動駕駛的高精度地圖模型和地圖的快速生產,是實現自動駕駛的核心基礎問題。本文研究了面向自動駕駛的高精度地圖模型,為自動駕駛建立面向機器、精細化、現勢性強的高精度地圖提供技術支持。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中華手工(2017年2期)2017-06-06 23:00:31
光學精密工程(2016年6期)2016-11-07 09:07:19
中外會展(2014年4期)2014-11-27 07:46:46