基于信息融合的前方車輛檢測技術
2022-09-08 13:06:06賀沅瑋余有糧喻煜烽
內燃機與配件 2022年14期
隨著人們的生活水平不斷提高,使車輛保有量得到增加,人們也越來越重視交通安全問題。世界各國開始研究車輛輔助加濕系統,使安全行車目的得到實現。通過車輛輔助駕駛系統能夠對車輛行駛方向周圍車輛、行人等進行實時檢測,使駕駛人利用針對性措施避免危險。前方車輛檢測能夠避免由于安全車距不足導致車輛追尾,提高車輛駕駛中的安全性。所以,本文結合多信息融合實現前方車輛檢測,避免單個特征檢測缺點,使車輛檢測效率與精準率得到提高。
——共建共享,融合發展。整合資源,部門聯動,統籌推進,加快鄉村旅游與農業、教育、科技、體育、健康、養老、文化創意、文物保護等領域深度融合,培育鄉村旅游新產品新業態新模式,推進農村一二三產業融合發展,實現農業增效、農民增收、農村增美。
1 車輛陰影檢測
車輛陰影是指光照在車輛中的圖像,陰影灰度值接近車輛顏色部分灰度值,對車輛陰影進行檢測能夠識別車輛問題。陰影主要包括暗影和半影,半影會影響車輛的識別,所以就要消除半影。車輛對比路面背景,淺色車身的灰度值比較大,從大到小灰度值分別為淺色車身、背景、半影、黑色車身和車底暗影。根據上述灰度分布,無論是淺色或者深色的車輛,車輛和半影有一定的差別,所以利用閾值分割圖像消除半影,應用公式為:
本題是培養學生轉化能力的極佳素材,雖然條件一讀就懂、圖形一看就明,但一做卻又難以入手.不過,借助“知識溯源式目標分析法”卻可巧妙地讓解題思維轉化路線圖水落石出.

公式1
公式中的
與
指的是路面灰度均值與均方差,
=20、
=20對車輛陰影檢測,通過路面分離。在選擇閾值比較低的時候,提取車輛目標存在大面積半影,車輛面積比較大;在選擇閾值比較高的時候,和背景灰度接近的淺色車身識別比較困難。
本文使用多門限分割方法使車輛陰影分割準確性得到提高,解決目標與背景具備不同層次的問題。假設經過一次二維最大類間方差分割,求圖像
(
,
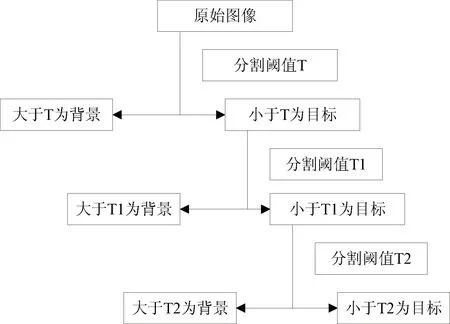
)在灰度級[0,L-1]的全局門限值(s*,T*),原本灰度級為[0,S-1]的區域被劃分成為背景C0。為了實現多級分割,使目標與背景區域連續遞歸的分割。在整個分割過程中,遞歸實現原圖像的灰度級分割,直到沒有新區域被分割。為了避免分割門限比較多,使目標區域劃分成為不同的區域。本文充分考慮車輛陰影或者底部暗區域灰度值比較低,將路面分割半影消除實現三次分割,分割之后的圖像包括五個灰度級,最低灰度級為分割出車輛陰影區域或者車輛底部暗影部分,圖1為多門限分割算法流程。
本文使用BDD100K數據集與實驗室自建數據集,開發內容多樣化,包括不同場景、天氣和時間等。本文自建數據集指的是車載行車記錄儀在某道路中車輛行駛中得到的,包括不同場景中的實時道路視頻和圖像。
2 基于融合的車輛檢測
2.1 車輛篩選
為了對油澤、積水、橋梁等陰影干擾進行排除,壓縮檢測對象。使連通區域中上下垂直間隔五個像素距離,對陰影線位置坐標最大值進行選擇。根據透視投影原理約束長度。圖像陰影長度
與車輛寬度
能夠滿足比例關系,陰影線長度假設為
,陰影約束條件為:
公式2
對象通過閾值處理作為塊狀區域,包括車尾和背景。車輛分割后的陰影和車尾能夠使矩形特點得到滿足,定義矩形度為陰影面積
與外接矩形面積
的比,排除矩形度小于0
6的區域,對陰影區域進行初步篩選:

公式3
車道檢測在車輛行為識別中尤為重要,檢測結果對車輛行為識別精準性具有直接影響。目前車道檢測方法包括Hough變換改進算法、貝塞爾曲線模型檢測算法、Haar特性圖像匹配算法等,所以選擇以上文獻方法和本文算法進行評估,選擇數據集中的白天、夜晚、傍晚、下雨天四種情景中的600幀圖像,表1為車道檢測算法評估結果。
完整車輛候選區域利用先驗知識表示:在陰影線的左右延伸像素,根據車輛的高寬比陰影線的行動方向確定車輛感興趣區域。車輛邊界結構具有明顯的邊緣特征,近似為矩形區域。車輛垂直兩邊界長度大于內部垂直邊緣,確定同理水平方向。利用
算法對測量感興趣區域的邊緣檢測,計算邊緣圖像水平和垂直方向的投影積分量。車輛最外邊的矩形框指的是利用先驗知識得到初步車輛感興趣區,粗線標記矩陣是指邊緣確定邊界對車輛候選區進行提取。
美國對伊朗的制裁主要分為“初級制裁”和“次級制裁”。美國對伊制裁始于“初級制裁”且未曾間斷,在加入《伊朗核協議》后絕大多數“次級制裁”曾被取消,但目前“次級制裁”已再次啟動并得到了強化。“初級制裁”和“次級制裁”區別的關鍵在于相關行為是否同美國存在連接點(Nexus)。
2.2 信息融合的車輛檢測
其一,使非車輛年目標(
)誤判成為真車(
);
=2
(
)tan(
2)-
公式4
公式中的
指的是圖像中車輛的長度,
指的是圖像最大水平寬度,
指的是激光器距離前方車輛的垂直距離。
基于最小風險貝葉斯決策分類器實現先驗概率與類條件概率,先驗概率
(
)(
=1,2)指的是通過單一視覺圖像對車輛目標識別的概率,可以劃分為真車
與誤判條件下
的概率。通過實驗驗證,
(
)=87%,
(
)=13%。類條件概率密度
(
|
)(
=1,2)劃分成為真車與誤判條件下車輛驗證函數
值的概率密度分布
(
|
)與
(
|
),
(
|
)指的是正態分布,
(
|
)指的是均勻分布,因為車輛寬度為1.5~2.5m,所以:
公式5
公式6
在對目標車輛驗證函數
值計算過程中,得到先驗概率
(
)與類條件概率密度
(
|
)之后,使用貝葉斯決策實現初始別車輛目標的分類,可能會存在以下錯誤判斷:
基于視覺傳感器檢測,使用激光掃描數據庫創建車輛驗證函數,并且實現最小風險的貝葉斯決策的激光掃描和視覺圖像的信息融合。使用車輛驗證函數所描述目標車輛特征,實現識別結果的決策和分類,使系統決策精度得到提高。目標車輛高度和寬度通過車輛在圖像中的攝像機參數、寬度和激光測量目標距離,利用車輛高度驗證結構計算,創建車輛驗證函數:
其二,使真車(
)誤判成為非車輛目標(
)并剔除。
后者比較危險,但是最終判決要求基于最小錯誤代價,所以定義
指的是真實情況下
(
=1,2),判決為
(
=1,2)時候的判決代價,設置
11=
22=0,
12=5,
21=1。以貝葉斯公式與判決代價對后驗概率
(
|
)與判決風險
(
|
)計算為:

公式7

公式8
假如
(
|
)<
(
|
),說明目標判決為真車風險比較小,所以判決目標為真車;
(
|
)>
(
|
),目標判決為非車輛風險比較小,所以判決目標為非車輛,剔除目標。
3 實驗結果和分析
3.1 數據集與實驗平臺
根據目前我國既有地鐵標準站的改造情況來看,大部分改造工程的改造量較小,對既有站運營影響亦較小。通常兩線車站采用通道換乘模式,該模式下兩線車站結構完全脫離,采用通道或樓梯將兩個車站間接連接起來供乘客換乘。現階段我國地鐵車站在未預留換乘條件的情況下,多采用站廳通道連接的換乘形式,在對既有運營線路影響不大的前提下,這是比較現實可行的方案。典型的工程案例如北京的磁器口站和車公莊站,以及廣州的員村站等。
3.2 車道檢測結果分析
公式中的
指的是安裝攝像機高度,
指的是圖像中陰影的行。
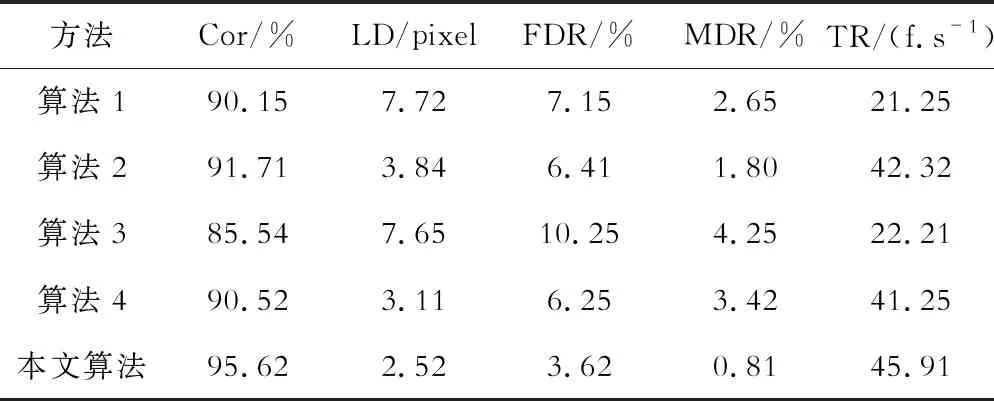
通過表1可以看出來,算法1利用Haar特征對車道信息精準識別,但是算法計算復雜度降低傳輸速率;算法2使用貝塞爾曲線模型,通過車道連續性特征搜索,使檢測實時性與效率得到提高;算法3利用改進Hough變換實現車道檢測,和算法2對比的檢測精度和效率比較高,降低了算法漏檢率與誤檢率;本文算法在檢測車道過程中,利用改進算法創建插值公式,和以上算法對比處理數據量比較少,速度更快,使算法運行效率得到提高,在復雜環境中能夠避免車道檢測中的精準率。本文算法在白天、雨天、晚上、傍晚環境下的車道檢測精準度得到提高,為后續車道行為識別打下基礎。
3.3 車道行為識別結果
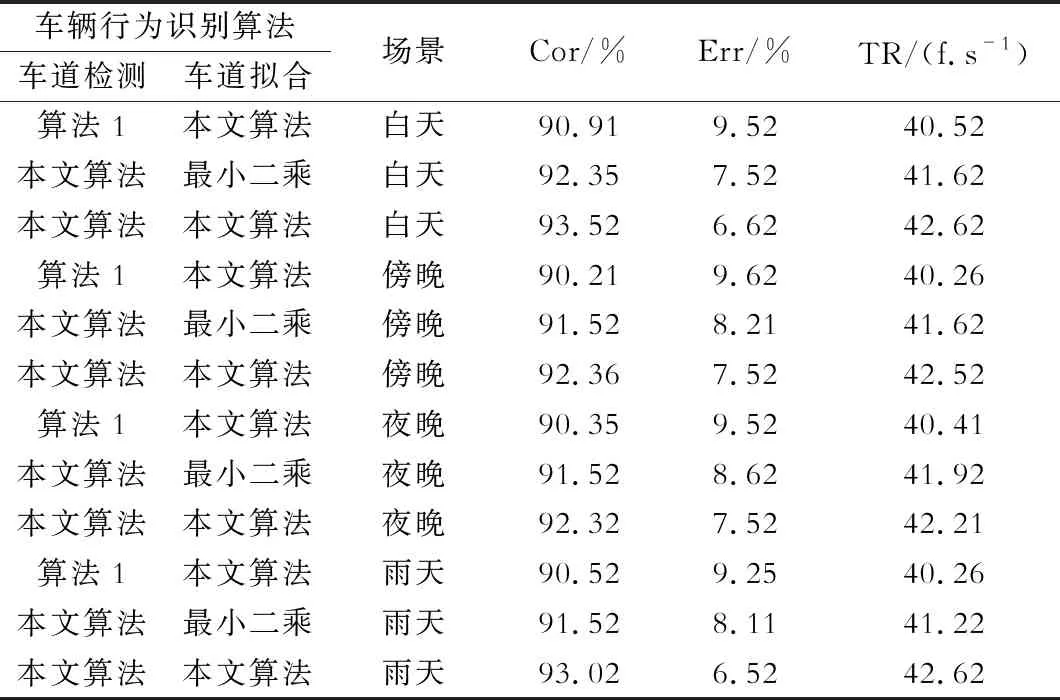
為了對本文車輛行為識別算法性能進行評估,在公開數據集與實驗室創建的數據集中測試。以車道檢測結果選擇車道檢測精準率比較高的算法和本文三次樣條車道擬合算法組合,并且使用最小二乘車道擬合算法實現車輛行為識別,和本文算法對比,表2為準確率(Cor)、傳輸速率(TR)、錯誤率(Err)的測試結果。

通過表2可以看出來,因為車道檢測過程中檢測精準率的差異,在車輛行為識別過程中的結果各有不同,本文算法對比其他算法的檢測精度不斷提高,能夠使實時性需求得到滿足。在方法4車道擬合方法選擇最小二乘法,本文車輛行為識別結果精準率比較高。
研究一的主要目的是初步驗證假設H1,即同異步溝通對心流體驗的差異影響。本文選擇某網絡視頻網站中的網絡用戶作為樣本,共69名被試參與了實驗,其中男性39名,女性30名。
目前,我國跨境電子商務行業人才現狀難以滿足跨境電商發展的需要。從事跨境電商的人員很多,但真正能讓跨境電商企業滿意的人才不多。
針對不同場景的車輛行為識別結果,對數據結合選擇精準率比較高的方法對車輛行為識別算法進行評估,不同場景選擇800幀視頻圖像,表3為不同場景的車輛識別結果。根據表3中的結果表示,在不同場景下的本文算法都具有較高的識別精準率與傳輸速率。
4 結束語
本文提出了基于信息融合的前方車輛檢測算法,通過實驗結果表示,此算法能夠對大部分環境下車輛進行檢測,具備較強可靠性與魯棒性,能夠實現多閾值分割消除半影影響的方法精準定位車輛。
[1]陳學文, 陳華清, 裴月瑩. 基于多特征融合的汽車先進輔助駕駛系統前方車輛檢測方法[J]. 計算機應用, 2020, 40(S01):4.
[2]宋士奇, 樸燕, 王健. 基于車道信息融合的車輛行為識別[J]. 液晶與顯示, 2020, 35(1):11.
[3]李航, 張琦, 殷守林,等. 一種基于改進Faster RCNN的校園車輛檢測方法[J]. 沈陽師范大學學報:自然科學版, 2020, 38(1):8.
[4]胡延平, 劉菲, 魏振亞,等. 毫米波雷達與視覺傳感器信息融合的車輛跟蹤[J]. 中國機械工程, 2021, 32(18):8.
[5]代曉康, 殷君君, 楊健. 基于Wishart距離和超像素的極化SAR圖像車輛檢測[J]. 系統工程與電子技術, 2021, 43(10):9.
[6]宋其杰, 劉峰, 干宗良,等. 基于多維特征和語境信息融合的車牌檢測方法[J]. 計算機技術與發展, 2021, 31(9):6.
[7]涂超, 趙波, 王喜龍. 基于多源信息融合的交通要素識別方法研究[J]. 農業裝備與車輛工程, 2020, 58(2):6.
[8]劉志強, 張光林, 鄭曰文,等. 基于檢測無跡信息融合算法的多傳感融合方法[J]. 汽車工程, 2020, 42(7):6.