基于GA-PSO的六軸機械臂軌跡規劃方法
2022-09-08 08:21:14石征錦董恩奇白士宇
內燃機與配件 2022年14期
機械臂軌跡規劃較為基礎的方法主要有兩種,其一是關節空間規劃,它在運動時可以防止機械臂出現不穩定性和冗余的問題,因此大部分人都用該方法
;另一種是笛卡爾空間規劃,該方法相對于第一種較為少用。文獻[2]在對機械臂關節空間運動軌跡規劃進行闡述時,對照3次和5次多項式中運行空間規劃后的優缺點,結果顯示3次多項式在運行空間規劃時的效果明顯低于5次多項式。
為了使機械臂在各性能中的某個目標達到最佳,需要嚴謹的謀劃出一條符合機械臂各關節條件限制的運行軌跡,使其運動性能得以充分發揮。在隨機的場景中可對機械臂各個性能進行相應的優化,目前主要優化目標為以下三種:運行時間,關節撞擊以及能量損失。本文主要針對運行時間這一方面進行深刻分析及研究。針對此方面,文獻[1]和文獻[3]對遺傳算法進行改進,進而求解出時間最短的運行軌跡,加快了算法的收斂;文獻[4]則將遺傳算法自適應度提高,從而使其收斂速度變快。文獻[5]使用了傳統粒子群算法獲取到工業機械臂相應時間—脈動的最佳運行軌跡。當今工業機械臂領域中,不同的智能優化算法亦有相應的劣勢。例如傳統遺傳算法主要的缺陷表現在擴展能力不足而且收斂速率相對較慢;粒子群算法的缺點在于容易得到部分最優解。文獻[6]在初速度和加速度以及加加速度的限制條件下獲取了時間最佳3次多項式運行軌跡。時間最短的前提大多數是通過速度的最大化以及加速度的最大化來實現,不過這樣利用極限速度來實現這一指標會使關節的力矩變大,容易導致電機的過流進而嚴重磨損機構。文獻[7]運用改進人工蜂群算法提高收斂速度,但也難以求出實際的全局最優解。文獻[8]運用機器人學中的運動學和軌跡規劃的知識,提出“3-5-3”混合多項式插值函數的方法進行了對過路徑點得起軌跡規劃,但對動力學、控制理論部分的研究并沒有涉及。文獻[9]利用牛頓法搭配埃特金加速法進行優化,得出5次B樣條函數插值運動軌跡規劃,使其在撞擊以及時間方面得到最優解。文獻[10]通過實際應用問題分析機械臂的關節角度和速度來達到穩定運行。文獻[11]研究出一種限制柔性連桿機械臂振動的軌跡規劃方法。文獻[12]提出了4-5-4多項式混合插補算法、PSO優化算法并將兩種算法相結合的軌跡規劃方案,但沒有進一步把機器人動力學等相關變量信息一并考慮。
綜上可知,在不控制情境的前提下,大班幼兒有很多種同伴交往策略。并且不難看出,以上歸類的策略是很多具體交往策略的概括。大班幼兒在進入人際互動時,交往技能還不是很成熟,一些生硬、直接的同伴交往策略的種類還是比較多的,大班幼兒在同伴交往過程中,可能會同時使用幾種策略對同一事件做出反應。如:面對同伴的拉扯,他邊使勁推開同伴,邊大聲指責:“你干嘛,走開”。很明顯,他在面對同伴的拉扯時,采用了個人攻擊、指責和指令策略。
本文提出了一種人工智能算法來對軌跡優化,它的基本流程是先將笛卡爾空間規劃予以的相應路徑點轉化成關節空間運行軌跡的各個點,這種方式可按照關節空間運動規劃的流程,運用5次多項式來執行相對應的運動軌跡規劃;然后連合GA-PSO混合優化算法進行關節空間中位置和時間優化,獲得精確的最優解。
法國分蔥代表休伯特·列南(Hubert LENAN)先生在接受本刊記者采訪時介紹到,目前分蔥主要在法國布列塔尼區和盧瓦爾河地兩個大區進行種植,占了法國大部分分蔥的產量。法國的分蔥主要是在海洋氣候下生長,這個地區特有的利摩爾土壤,使得種出來的分蔥營養價值更高。首先,分蔥完全手工種植,種植深度要求在20厘米-25厘米左右;其次,完全手工采摘;再次,在分蔥收獲之后要將其在太陽下曝曬兩到三周,通過日曬讓分蔥的營養變得非常集聚、緊實,更有利于保存;最后,用機器對它進行分解、風干,再進入到儲存或銷售的環節。
1 機械臂的建模
(2)生成原始種群并開始進行適應度值的計算。然后輸出目前種群的最優位置和全局的最優位置;
遵循任務的需求準則,機械臂終端須要途經的點Pi(i=1,2,3…N)利用機器人逆運動學得出關節空間規劃中相應關節的關節角度
,
則視為第
個關節(
=1,2,3,4,5,6)。設置各個關節的時間序次為
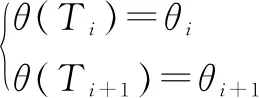
,全部軌跡的初始點和結束點的速率還有加速度的值均為0。本文利用5次多項式的方法對關節角度進行描述。從目標點
到
+1,兩個起點位置的限制條件為:
由此得出5次多項式相應插值下路徑
、速度
以及加速度
如下:
推薦理由:這是來自暢銷書系列《圖書館老鼠》的獲獎作者丹尼爾·柯克的一本非虛構的傳記繪本。本書引發了人們對于野生動物保護和對世界瀕危動物的關注,促進了人們對于動物救助和福利的進一步了解。這個迷人的故事,有助于孩子們對于人類與動物之間關系的了解。
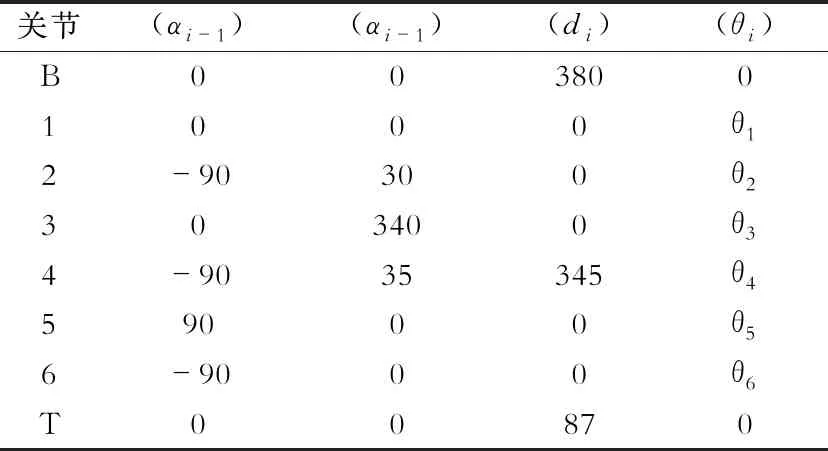
此D-H參數表的
視為關節轉角,
視為連桿偏距,
-1
視為連桿長度,
-1
視為連桿轉角。由該四個參數即可確立相鄰軸間坐標系的轉換關系。
2 軌跡規劃論述
李達是中共一大的發起者、籌備者、召集者和組織者,他和夫人王會悟也是同時參加黨的一大的唯一一對夫妻。在中國共產黨早期領導人中,“還很少有像李達同志這樣勤奮、這樣有豐富的卓越的成就,這樣在任何困難危險的環境下生命不息、戰斗不止的馬克思主義宣傳家、教育家,這樣堅定勇敢而不斷追求進步,力求達到當代的最高水平的馬克思主義理論戰士”。他為中國共產黨的創立,為馬克思主義在中國的傳播,為豐富毛澤東哲學思想作出了重要貢獻。
(3)通過與約束條件進行對比,對當前迭代中的粒子的速度與位置持續進行更新;
(1)
機械臂關節速度的限制條件為:
(2)
ti變量作為此次需要被優化的對象,表示每一節的運動時間,公式(6)作為此次目標函數,公式(7)作為限制的條件,
作為關節
最高速度,
作為最高加速度,
為力矩最高值。利用公式(6)可計算得出在任一時間中機械臂關節運行速度、關節角度以及其加速度,利用公式(1)可計算出關節在任意時刻的力矩,得出的結果放到公式(7)算出機械臂相應運動的約束方程。
(3)
將限制條件(1)~(3)聯立可計算出關節中運動函數里各系數為:
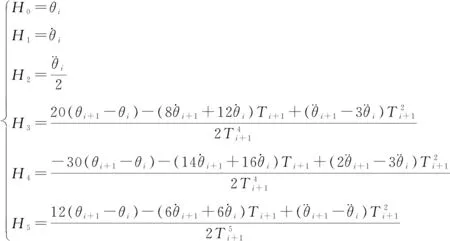
(4)
運用機器人學的逆運動學,利用末端位姿來進行逆運動學求解,從而得到關節空間中的各個關節角度;通過各個軸的角度值進行計算來獲得終點位置的方法叫做正運動學。ROKAE機械臂中XB7的D-H參數表如表1所示。

(5)
在提升效率同時還要考慮機械臂的運動學和動力學兩個約束問題:
(6)

(7)
機械臂關節加速度的限制條件為:
運用5次多項式的規劃方法來闡述機械臂關節角的前提條件是要獲取相應軌跡運行所得時間,由于其在已有時間條件下無法進行最優求解,因此使用智能算法進行相應的求解。本文采取GA-PSO混合算法來求解,算法主要流程如下:
(1)設計一個三維搜索空間,生成N個粒子種群,對各粒子的位置與速度進行初始化操作;
本文使用ROKAE的六軸工業機械臂,通過D-H參數法來獲取運動學的建模。如圖1所示。
確定渠道策略后勢必進行經銷商隊伍的整合與調整,要求新合作伙伴必須具備終端網絡資源和操作經驗。百雀羚積極與知名KA終端談判合作,先后進駐了沃爾瑪、華潤萬家、易初蓮花、世紀華聯、中百倉儲等KA類賣場,并進行了終端形象包裝。百雀羚的渠道變革很快得到了回報,結果百雀羚推出的草本精粹護膚商超系列,深受消費者的喜愛,銷售額高速增長,這都證明了百雀羚渠道選擇的正確性。
圖書館工作人員隊伍的復雜化導致了圖書館館員在學歷上 參差不齊。雖然不少館員通過不同的途徑加以學習提升了自己的學歷,但整體素質依然不高;非專業館員選擇了這份職業后都面臨一個角色轉換的過程,往往需要經歷一個長時間的學習過程,在積累了一定的工作經驗后才可以熟悉圖書館的館藏資源,運用學科知識為師生提供針對性、專業化、深層次的服務。為了更好的滿足讀者對信息資源的多元化需求,尤其需要專業技術人員對資源的整合集群和協同管理。因此學科館員在圖書館未來的發展中必定屬于中間力量。
(4)輸出全局最優解。
3 實驗與仿真
通過MATLAB進行仿真,如圖2所示為單獨使用PSO算法的迭代圖,圖3為單獨的GA算法迭代圖,圖4為GA-PSO混合算法迭代圖。
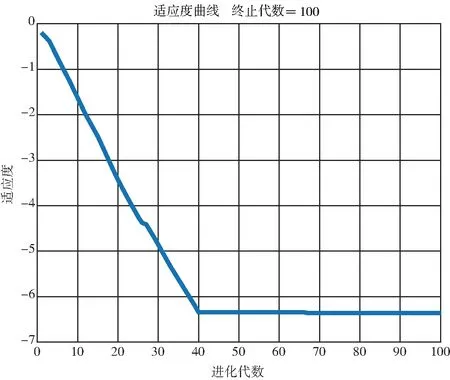
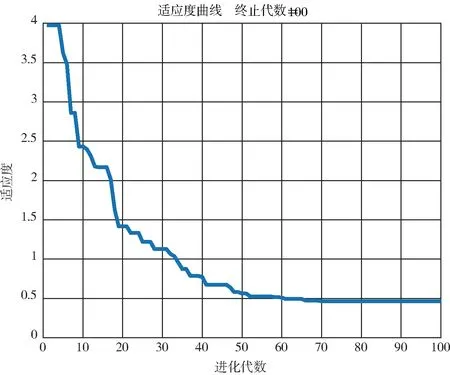
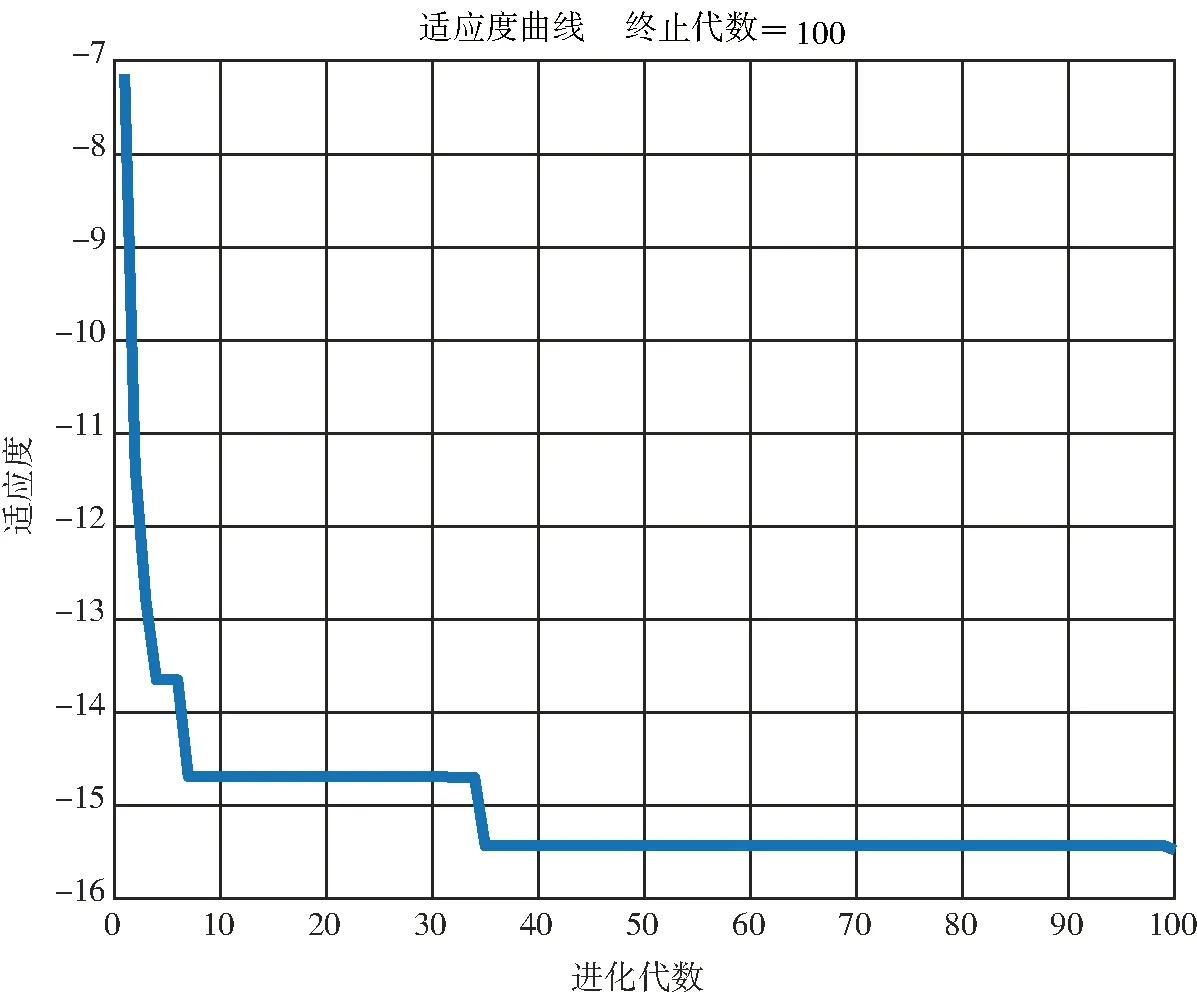
單獨使用PSO算法算法的迭代次數為40次,單獨使用GA算法迭代次數為69次,GA-PSO混合算法得出迭代次數則為35次,數據結果顯示,GA-PSO混合優化算法相比于單一的傳統算法收斂速度更迅速,適應度值更優。
ROKAE機械臂運行時間如表2所示,優化后運行時間減少1.65秒,效率提高了約23.6%

4 結論
本文在將機器人學中相應的運動學以及動力學作為限制條件,放棄3次多項式而使用5次多項式分析ROKAE機械臂每個關節角,提出了一種GA-PSO混合人工智能算法來達到以時間最短作為首要目標的運行軌跡規劃。實驗數據的結果表明,相比于單獨應用GA、PSO算法,使用GA-PSO混合人工智能算法可以使其收斂變得更加迅速,相應得出適應度的值更好。該算法可對ROKAE機械臂進行運行軌跡的優化,在限制了關節位置及其速度,相應的加速度的條件下減少了機械臂運行時間,對比不采用此算法的運行軌跡時間減少約23.6%。
[1]殷鳳健,梁慶華,程旭,等.基于時間最優的機械臂關節空間軌跡規劃算法[J].機械設計與研究,2017,33(5):12-15.
[2]孫亮,馬江,阮曉鋼.六自由度機械臂軌跡規劃與仿真研究[J].控制工程,2010,17(3):388-392.
[3]曾關平,王直杰.基于改進遺傳算法的機械臂時間最優軌跡規劃[J].科技創新與應用,2020(22):6-9.
[4]Liao Xiaoping,Wang Weidong,Lin Yizhong,Time-optimal trajectory planning for a 6R jointed welding robot using adaptive genetic algorithms[C]//Proceedings of 2010 International Conference on Computer,Mechatronics, Control and Electronic Engineering (CMCE 2010) Volume 2.Chang Chun:Institute of Electrical and Electronics Engineers,2010:617-620.
[5]沈悅,李銀伢,戚國慶,等.基于PSO的工業機器人時間-脈動最優軌跡規劃[J].計算機測量與控制,2017,25(1):158-162.
[6]譚冠政,蔣建敏.機器人的時間最優控制軌跡規劃[J].湘潭大學自然科學學報,1990,12(02): 106-113.
[7]舒鵬飛.六軸工業機器人的軌跡優化研究[D].合肥:合肥工業大學,2020:26-46.
[8]程浩田.基于正逆運動學分析的機械臂時間最優軌跡規劃研究[D].太原:中北大學,2021.49-54.
[9]查文斌,朱永飛,徐向榮,等.一種機械臂時間一沖擊軌跡的快速求解優化方法[J].機床與液壓,2021,49(9):11-15.
[10]陳梁遠,郭麗娟,唐彬,等.一種六氟化硫檢測機械臂的設計與分析[J].沈陽理工大學學報,2020,39(3):88-94.
[11]Li Yuanyuan,Sam Ge Shuzhi ,Wei Qingping ,et al. An Online Trajectory Planning Method of a Flexible-Link Manipulator Aiming at Vibration Suppression[J]. IEEE Access,2020,8(1):130616-130632.
[12]任偉.六自由度工業機器人軌跡規劃研究[D].蕪湖:安徽工程大學,2020:40-66.