基于Ansys Workbench的桁架式機械手爪結構設計與分析
2022-09-08 08:21:24白玉田
內燃機與配件 2022年14期
1 引言
隨著社會的進步與發展,我國制造業的人口紅利逐漸消失,制造業的轉型與升級發展將成為脫離現實困境的唯一途徑。先進的信息技術與機械設計生產理論相融合,為我國制造業的自動化和智能化發展打開了新的命門。工業生產的自動化成為我國制造業現階段發展的主流趨勢,工業機器人在制造行業的成熟應用也逐漸顯現出更明顯的優勢。工業機器人攜帶機械手爪可以提供高效、準確、低綜合成本的生產服務,進而逐步被眾多生產制造企業所青睞。當前,工業機器人的發展已基本成熟,然而對機器人作業起著決定性作用的機械手爪,其研究正如火如荼
。
現階段,機械手爪的發展主要集中在以下幾類,第一種為諸如雄克ABB、柳道、雄克等一大批業內翹楚,其設計的機械手爪已逐漸趨于標準化,也主要被各類大型企業和精密生產企業所接受;第二種為國內自主品牌,該類機械手爪主要為自動化服務企業所推銷的附屬產品,為此手爪品質也良莠不齊;第三種主要為非標生產的定制化機械手爪,該種手爪主要針對某一實際生產現場所設計,普適性差,但使用可靠性、穩定性、性價比較高,故常被中小型企業所青睞
。
本文將以某大型鑄造生產線為例,對大載重自動化機械手爪進行機械結構設計,通過有限單元法對設計結構進行進一步分析,以簡化手爪的設計研發過程,提高手爪的載重能力和載重可靠性,形成可參考的手爪設計方法。
2 設計概況
現階段,技術較為成熟的機械手爪主要有柔性軟體手爪和剛性手爪兩大類,其中柔性軟體手爪常用于果蔬的仿生采摘,剛性手爪則多用于工業生產
。剛性手爪根據工作特性又可分為剛性張角手爪和剛性平動手爪兩種設計結構,其中剛性張角手爪具有結構剛性差、包絡抓取牢固、操作穩定性差、設計復雜、控制難度大等特點,剛性平動手爪具有工作負載大、結構剛性好、抓取精度低、設計簡單等特點
。
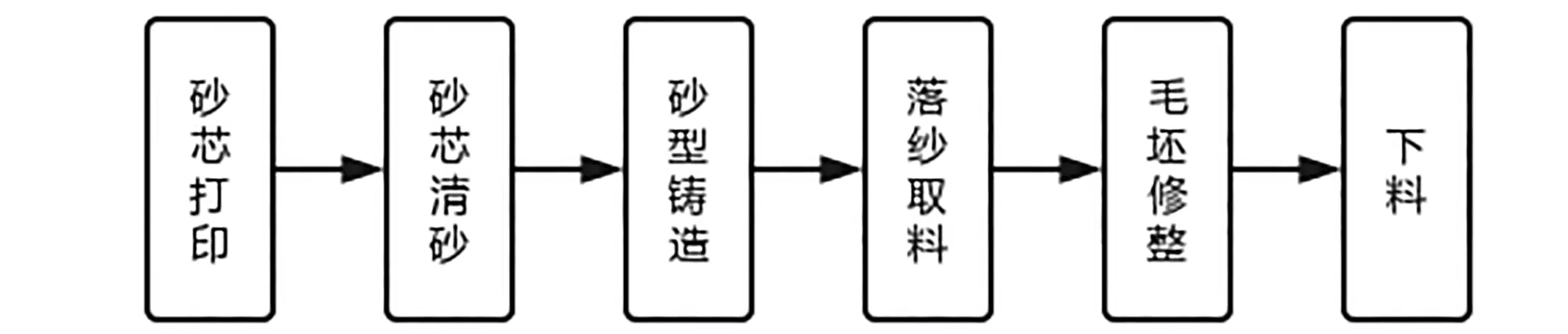
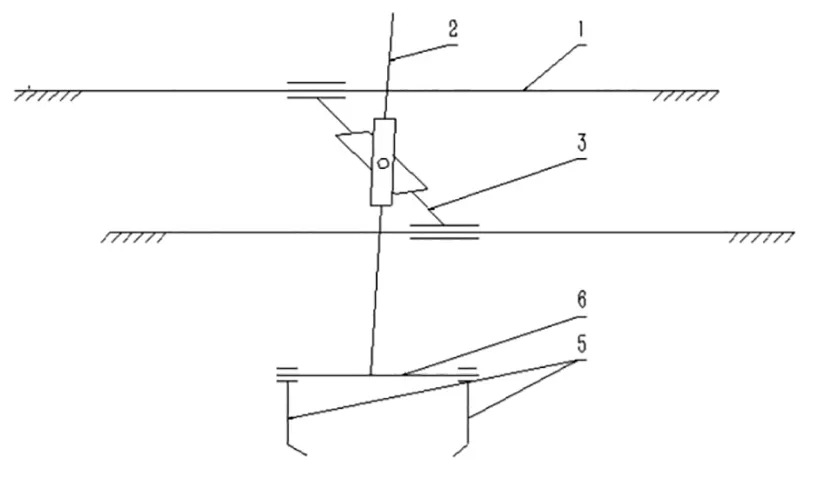
本大型鑄造生產線主要為航母等大型軍民用設備提供零件鑄造生產,涉及砂芯打印、砂芯清理、砂型鑄造、落砂取料、毛坯修整、下料等6大工藝環節,具體如圖1所示。該生產線機械手爪的設計功能主要為生產過程中大型砂芯及鑄造毛坯件的轉運,其抓取范圍為1.2t~1.8t。由于該產線鑄造砂芯及毛坯件的質量較大,故對轉運機械手爪作業負載、結構剛性及抓取穩定性要求高,而對抓取精度要求一般。本手爪結構的許用應力[δ]=120MPa,許用變形量[W]=5mm。結合以上要求,本機械手爪將采取剛性平動式機械結構設計,整體搭配機械桁架組合成桁架式機械臂用于輔助生產線的作業。手爪工作原理如圖2所示,桿5為一組平動手爪的執行部件,主要依靠對向平動實現對工件的抓取;桿2為手爪豎梁,主要動作為上下運動,以實現將工件提升至安全高度;桿3為手爪橫柱,攜帶工件及手爪在水平方向沿桁架1運動。
3 手爪結構設計
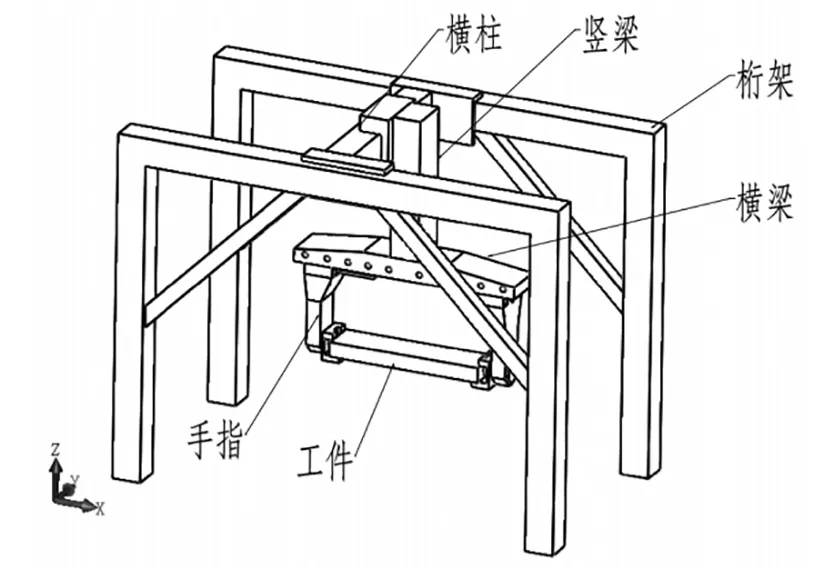
本生產線用機械手爪設計目的在于抓取大型砂芯及鑄造毛坯件,并對其進行生產轉運。結合該產線的實際工作條件,手爪的結構設計主要采取桁架式剛性平動機械結構。參照設計原理圖(圖2),本桁架式機械手爪可設計由桁架、橫柱、豎梁、橫梁、手指等部分組成,如圖3所示。圖示桁架為整體產線桁架的最小單元,每組跨距6.4m,產線整體桁架將由10組小桁架單元拼接而成;橫柱為整體手爪的承載與運動部分,上裝有伺服電機驅動,當控制器發出信號時,伺服電機帶動橫柱耳版下側滾輪實現橫柱精確運動,即由橫柱可攜帶手爪及工件在各工位件傳輸;豎梁為手爪結構的提升部件,通過上下運動以將工件提升至安全高度,豎梁和橫柱間由絲杠導軌連接,工作時由伺服電機驅動;橫梁為手爪的主要結構部件,通過導軌連接兩組對向手指,并附帶液壓驅動手指對向移動,進而實現對工件的抓取。
經分析,由于手爪構件中豎梁起著決定整體受力平衡的關鍵作用,其他結構件的工作變形量均來自于豎梁變形的二次迭代,且豎梁變形的大小將直接影響手指、橫梁等結構件的變形大小,為此對豎梁進行必要的強度分析和剛度校核,并以此作為理論基礎優化設計手爪結構,將可有效的提高本桁架式機械手爪設計的科學性與合理性。
H:150cm BMI:23.5kg/m 甲狀腺觸診2度腫大,質地較韌,活動度好;心肺腹觸診、叩診、聽診無異常。
注:此處只做豎梁剛度和強度分析,橫梁和手指材料更換帶來的影響已另做分析,且分析結果符合要求。
4 機械手爪有限元分析
4.1 前處理階段
由于機械手爪結構為非對稱式結構,所以運載工件啟停時整體結構所受慣性力不一致,即當手爪攜帶工件處于位姿越低,手爪運行加速度越大,則桁架式機械手爪的變形量越大,所處狀態越危險。此處,我們選擇桁架式機械手剛抓取完成,又正在啟動狀態這一危險位姿進行分析研究
。
根據上述設計,我們設置桁架式機械手豎梁為壁厚12mm的規則形方鋼型材,正常工作時手爪最大負載量為1.8t,攜帶工件的最大運載速度為600mm/s,加速度為1200mm/s
。打開Ansys Workbench軟件,在工程數據中選擇材料為結構鋼(密度7850kg/m
,彈性模量200GPa,泊松比0.3)。
安:當我剛開始學琴時,只接觸過立式琴。如你所說,因為結構區別,我無法在立式琴上探索出上述方法,只能彈出最基本的強弱對比。11歲那年,進入音樂學院之后,我開始使用三角鋼琴,當我與帕內拉和齊科里尼教授學琴時,便在三角鋼琴上探索上述方法和聲音。我的觀點是,演奏者首先需要理解并習慣三角琴的運行模式,才能自如控制三角琴和立式鋼琴,而如果只習慣于立式琴,是無法在三角鋼琴上營造美妙聲音的。
組網設計需要與住宅結構相結合,不同住宅其組網的設計也不同,在進行組網設計的過程中,必須要進行充分的考慮,特別是在使用無源光網絡時性需要對其傳輸的距離進行考慮,有效的將分路器級聯進行控制,使其始終保持在二級以內。
4.2 計算結果分析
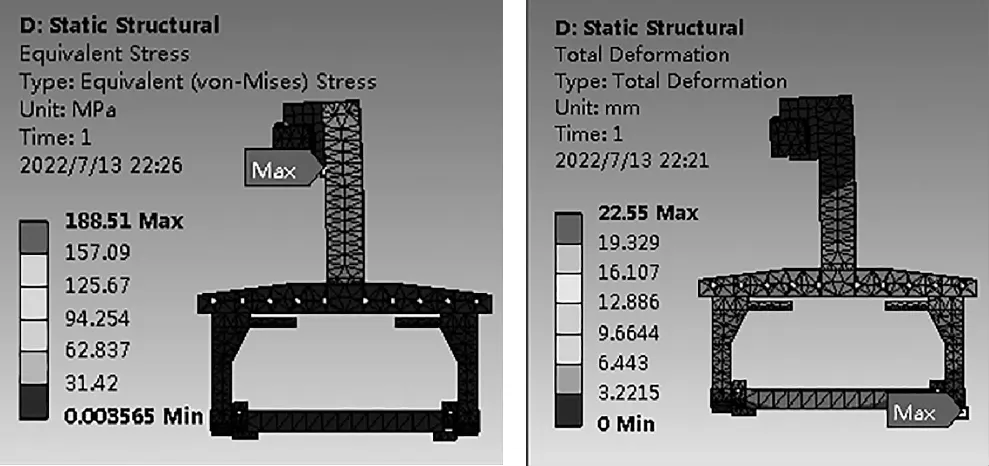
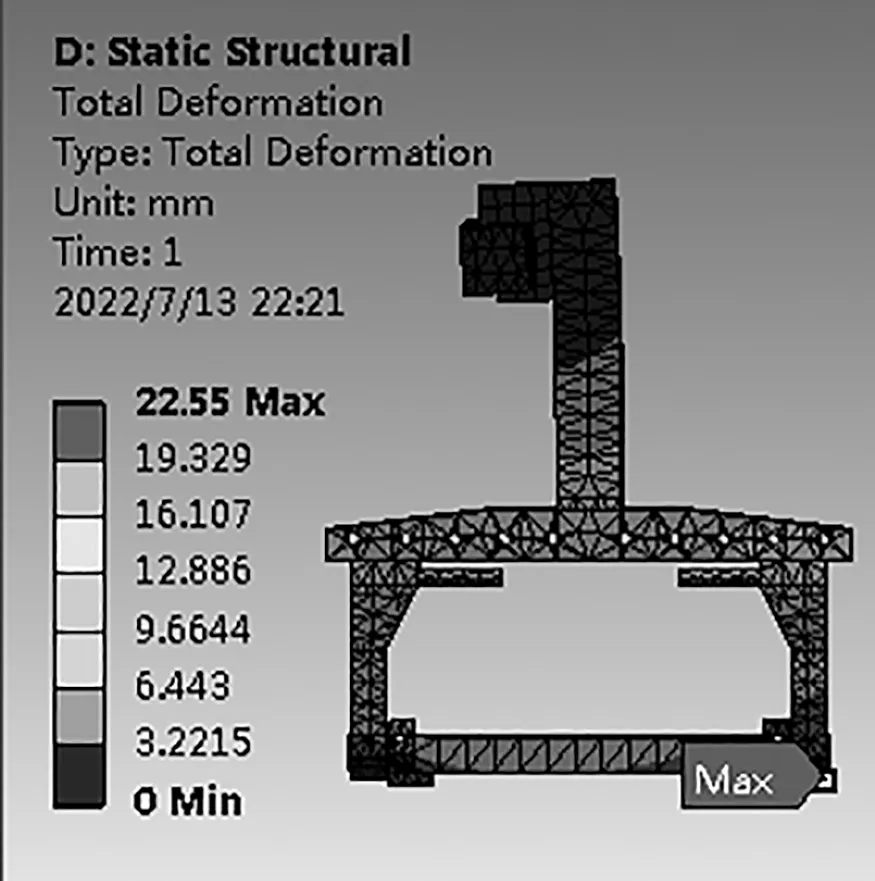
通過AnsysWorkbench軟件Static Structural模塊分析可得,桁架式機械手爪關鍵結構的云圖如圖4-圖7所示。桁架式機械手爪在最大載荷和最危險姿態工作條件下,最大應力應力集中在豎梁上端靠近橫柱一側,最大應力值為188.51MPa>[δ];最大變形量出現在遠離橫柱端一側手指的右下角,最大變形量為22.55mm>[W],故手爪初步設計不能滿足要求。

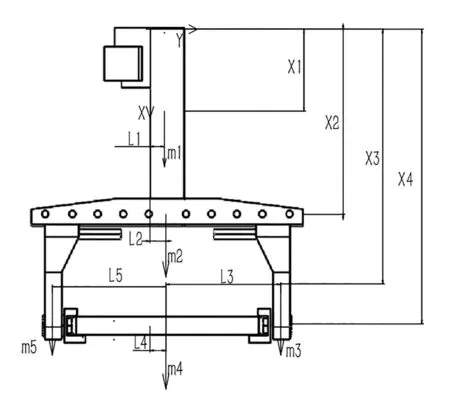
綜合分析桁架式機械手爪有限元結果可知,手爪的最大應力取決于豎梁的應力變化。雖然手爪的最大變形量體現在手指構件上,但分析桁架機械手爪結構可發現,對其安全性及平穩性起決定作用的主要集中在豎梁、橫梁、手指三個構件。考慮到手爪結構在工作過程中要承擔工件載荷、自重以及載重運載時所產生的慣性力的作用,參照圖8機械手爪質量分布圖可對手爪結構的撓度計算如下:
地質勘察是工程建設中的重要環節,勘察數據是否準確對工程建設至關重要。本文從工程地質勘察的概念與質量管理規范化角度出發,探討質量管理規范化的必要性,并指出工程地質勘察過程中存在的問題,對目前存在的問題給出整改措施,以期促進工程地質勘察質量的全面優化,保證工程建設質量。
將豎梁結構改變前后的有限元云圖對比分析可知,豎梁結構改變為空心圓柱加發散式加強筋結構后,豎梁的最大應力和變形量都得到較好的改善。最大應力的集中位置向橫柱方向偏移,數值降為13.007Mpa。最大變形仍以翹曲變形為主,數值降低為2.9602mm。
式中:ω
——各結構件質量對豎梁產生的撓度
ω
——慣性力對豎梁產生的撓度



式中:
——各結構件質量(kg);
、
——各結構件質心坐標(m);
——手爪構件總長度(m);
——彈性模量(MPa);
—豎梁橫截面對中性軸的慣性矩(m
);
中醫上講“腎為先天之本”,腎的好壞,看的就是腎氣足不足。如果腎氣足,排尿就痛快,用老百姓的說法:垃圾不就全排出來了嘛!
5 桁架式機械手爪豎梁的優化
在機械手爪工作過程中,豎梁作為主要的載重結構,受力情況復雜,其應力和變形的情況直接影響著整體手爪的狀態。從上述分析看出,在該危險工況下,豎梁的剛度和強度都不滿足設計要求。為了以最小的成本優化設計效果,考慮分別從豎梁材料和結構兩方面對豎梁進行優化。目前,市場上機械手爪所用的材料大多為結構鋼和鋁合金EN-AW1200兩大類,對比兩種材料的參數可知,結構鋼的強度高、加工性能良好、材質均勻且可靠性大,但自重較大
。而EN-AW1200鋁合金自重較輕、塑性較好、耐腐蝕性高。下面將從結構鋼和鋁合金EN-AW1200兩類材料選用,并從結構優化角度對桁架式機械手的豎梁進行設計改進。
5.1 結構優化方案
豎梁作為桁架式機械手的非對稱連接件,起著聯接手爪與桁架的關鍵作用,除負載和慣性影響外,豎梁和手爪的自重將直接集中作用在豎梁上,引起豎梁末端發生翹曲變形,進而被手指結構放大,直接影響手爪工作的穩定性和可靠性
。因此,考慮到機械手爪自重對整體穩定性產生的影響,結構優化改進的思路可集中在三方面:
(1)結構不變,在不影響手爪工作性能的情況下更換豎梁、橫梁以及手指材料。
(2)更改豎梁結構,但不更改材料屬性。
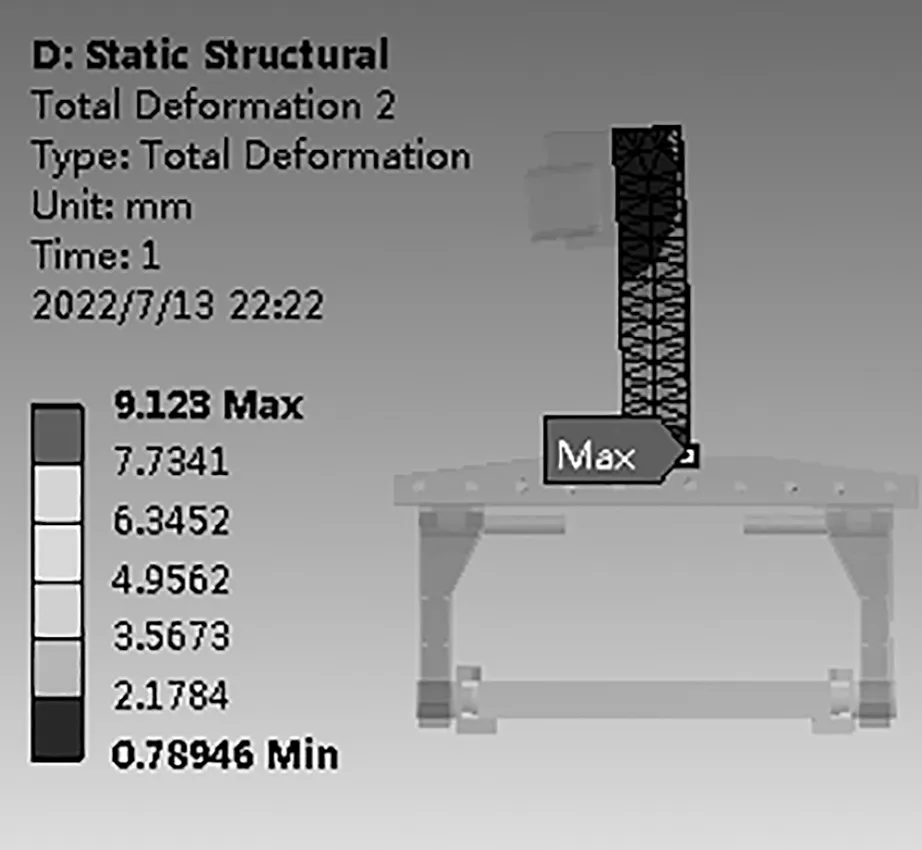
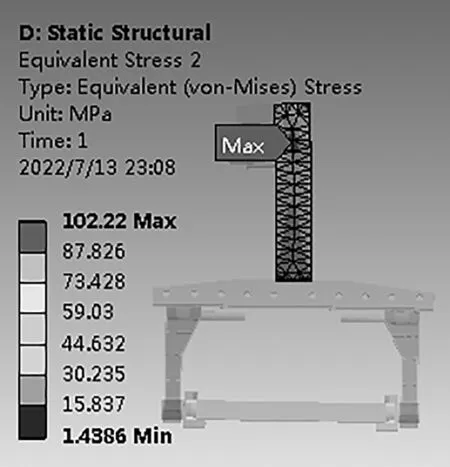
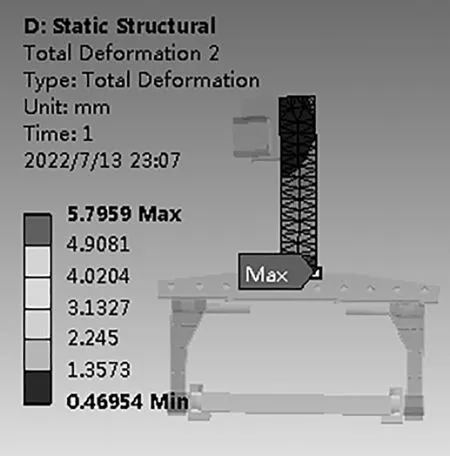
將豎梁材料更改前后有限元云圖對比分析可知,豎梁材料更換為鋁合金EN-AW1200后,最大應力由原來的188.51Mpa降低至102.22Mpa,最大變形量由原來的9.123mm降低在至5.7959mm。豎梁材料更改前后,豎梁的強度和剛度都得到有效的改善,且最大數值點的位置未發生改變。
受實際生產情況限制,本桁架式機械手爪結構為非對稱式設計,結構偏置將導致本手爪除了應滿足強度條件外更重要滿足剛度條件,即變形量不得超過一定的限度,進而保證本手爪能夠正常工作
。
5.2 結構優化
利用參數化建模思想,以豎梁結構為優化對象,以豎梁撓度和所受應力為優化目標,并結合機械手爪整體的質量指標,對不同方案進行有限元仿真
,對比獲取最優設計方案。
方案一:不更改豎梁結構,將豎梁材料更換為鋁合金EN-AW1200。豎梁的有限元分析結果如圖9、圖10所示。
為了得到箱梁翼緣板的準確正應力,將預應力加在兩腹板上的點10位置處,如圖1所示,兩根鋼束的預應力合力大小均為300 N。在ANSYS中利用LINK8單元模擬預應力作用,通過賦予初始應變得到所需預應力。研究初期,也曾用等效荷載加在同一位置處,提取的結果和用LINK8單元算出來的結果進行對比分析,最后發現誤差較小,說明用LINK8單元模擬縱向預應力筋是準確的。跨中施加的集中荷載P亦可模擬車輪荷載作用下在跨中的等效集中力。
(3)更改豎梁結構,不影響手爪工作性能的情況下更換豎梁、橫梁以及手指材料。
采用SPSS 19.0統計學軟件對數據進行處理,計數資料采用x2比較,以P<0.05為差異有統計學意義。
豎梁材料更換為鋁合金EN-AW1200雖獲得理想的數值優化方向,但最大變形仍超過許用量,故還需進一步優化。
方案二:將豎梁的結構由12mm壁厚的規則性方鋼結構改進為空心圓柱加發散式加強筋結構,加強筋共4根,整體豎梁外形尺寸不變。此時豎梁材料屬性選用結構鋼。豎梁的有限元分析結果如圖11、圖12所示。

W=ω
+ω
為了在仿真過程中最大限度還原實際工作情況,需進一步在軟件中設置各結構件之間的接觸狀態。參照設計,在橫梁與兩手指之間設置不分離接觸,確保二者在保持連接的同時還可以實現滑移,進而模擬導軌與滑塊聯接;在手指與工件接觸面之間設置摩擦接觸,定義摩擦系數為0.15;其余各構建之間為綁定接觸
。在橫柱兩端面設置固定約束,用于限定整體機械手爪在X、Y和Z方向上的移動和轉動
。最后,根據實際加載載荷,并將控制元器件以及對整體研究影響不大的結構部件等效為質量單元耦合到手爪的相應位置,以確保仿真結果的準確性
。
1.2.1 研究工具 由自設的一般情況調查問卷和護士工作壓力源量表組成。根據研究目的,自行設計一般情況調查表,包括人口學資料(性別、年齡、護齡、職稱、學歷、婚姻狀況等)。護士工作壓力源量表由李小妹等編制而成,包括5個維度,即護理專業及工作、工作量及時間分配、工作環境及資源、患者護理、管理及人際關系,采用1~4 級評分法,1分代表沒有壓力,2 分代表壓力程度一般,3 分代表壓力程度較高,4 分代表壓力程度非常高,得分越高表明壓力程度越大,量表的總 Cronbach’s α系數為 0.98,具有良好的信效度[2]。
對比分析發現,豎梁結構的改變使得豎梁強度和剛度改善的同時,危險點也逐漸朝著脫離豎梁的方向運動,為此在該豎梁結構上繼續優化將可有效改善桁架式機械手爪的結構性能,并有望將手爪性能的影響因素轉移到其他非重要構件上。
方案三:豎梁選用空心圓柱加發散式加強筋結構,材料選用鋁合金EN-AW1200。豎梁的有限元分析結果如圖13、圖14所示。
CDIO代表了構思、設計、實現和運作。CDIO工程教育模式是近年來國際工程教育改革的最新成果,繼承和發展了歐美20多年來工程教育改革的理念。CDIO的理念從產品研發到產品運行,以其生命周期為載體,讓學生以主動的、實踐的、課程之間有機聯系的方式學習工程類課程和知識。
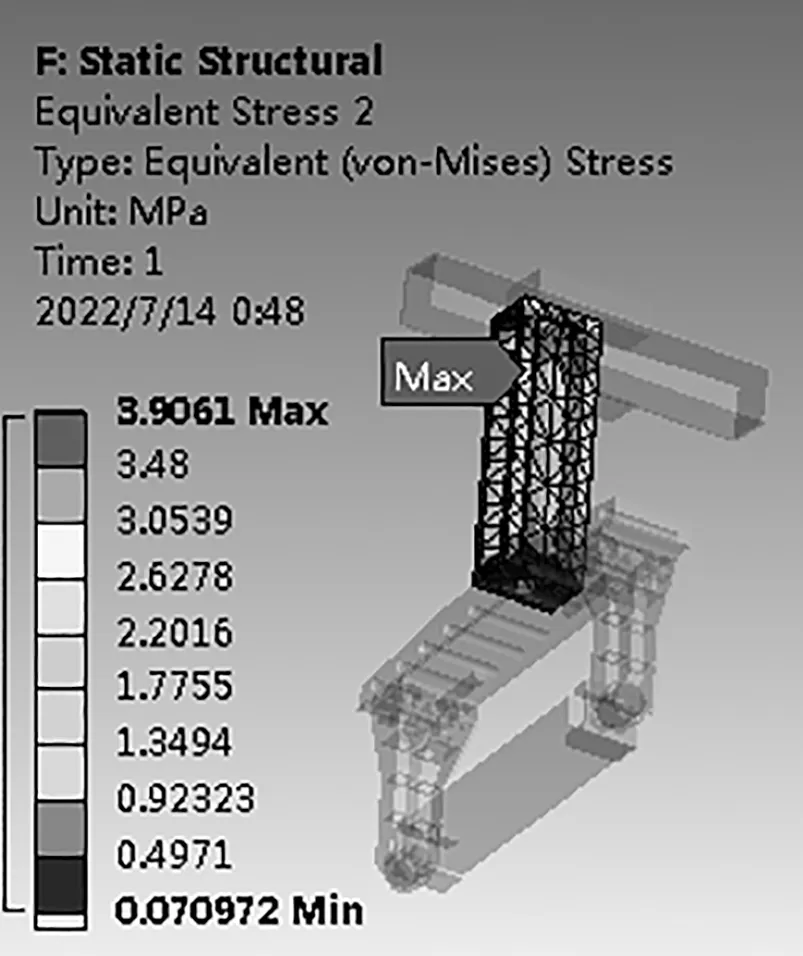
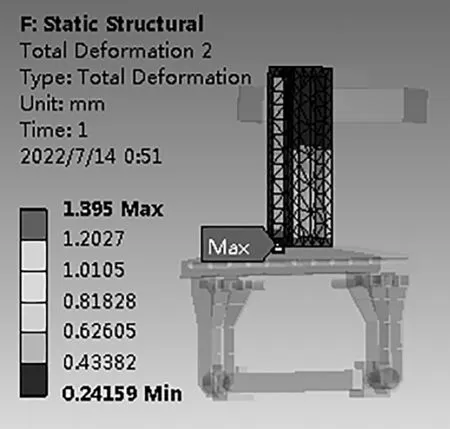
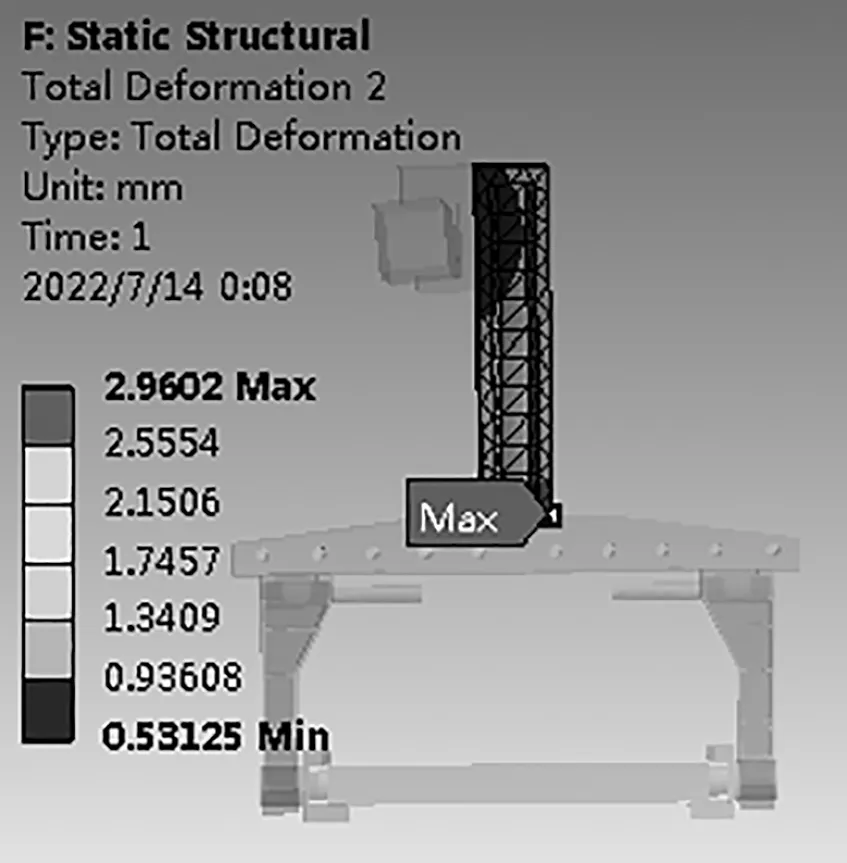
豎梁選用空心圓柱加發散式加強筋結構,材料選用鋁合金EN-AW1200后,所得應力云圖和變形云圖相比方案一和方案二的云圖結果取得了有效的改良。最大應力集中在豎梁外側與橫柱連接交匯處,數值為3.9061MPa。最大變形數值降低至1.395mm。
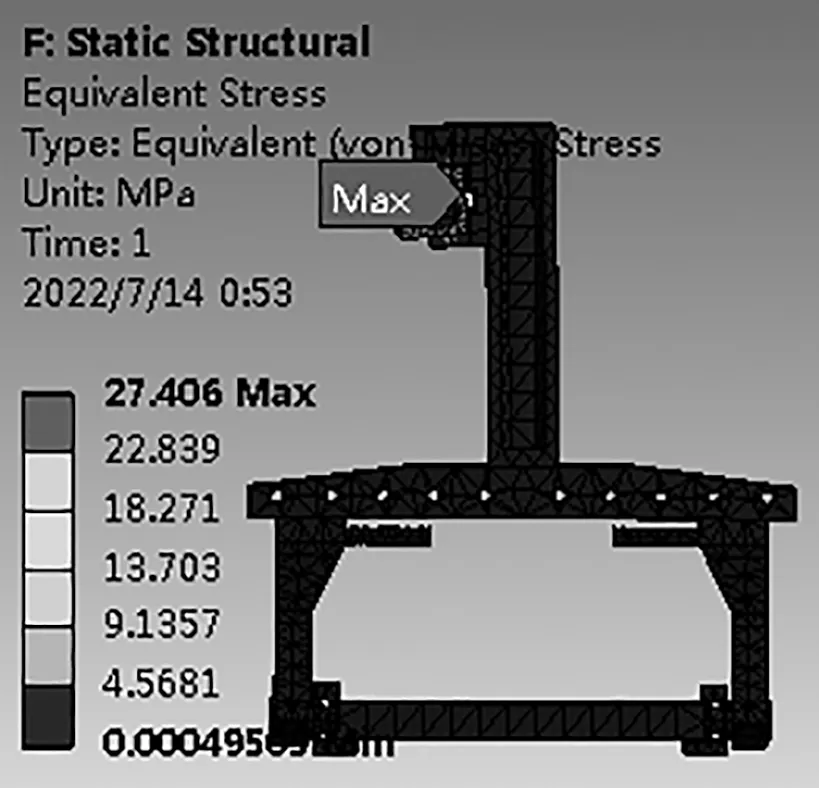
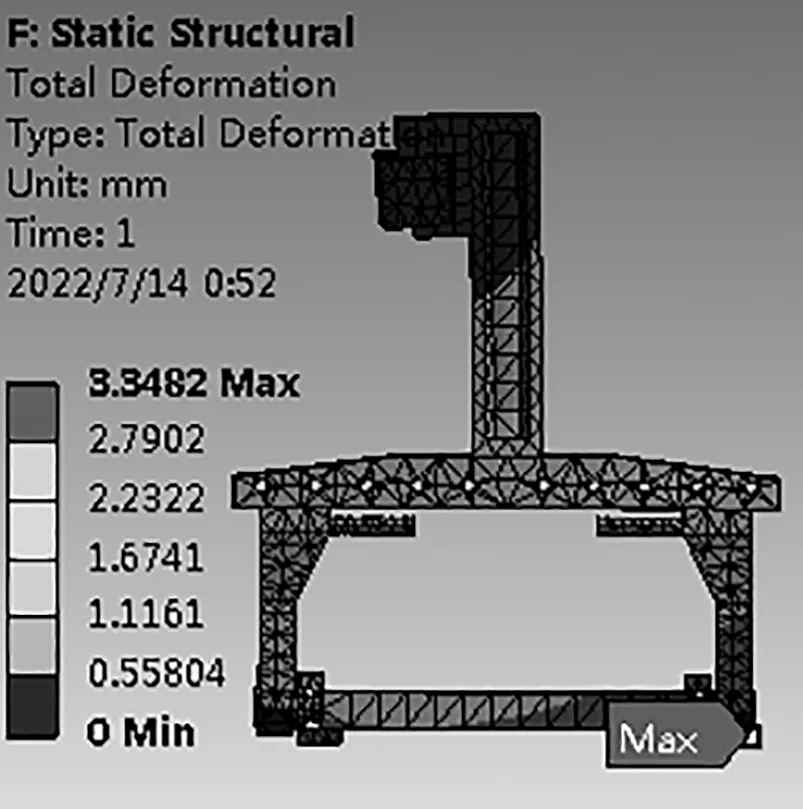
此時,結合圖15、圖16所示桁架式機械手爪云圖可以發現,機械手爪的最大應力已轉移至橫柱之上,脫離豎梁、橫梁和手指三大關鍵結構件,此時機械手爪的強度主要受桁架等外圍構建影響。最大應力值為27.406MPa,最大變形量為3.3482mm,均遠小于許用應力值。豎梁結構的強度和剛度達到理想的數值范圍。
5.3 結構優化分析
原設計機械手爪在危險位姿工作時,豎梁的最大應力集中的中間位置處,且超過許用應力,豎梁產生變形甚至破壞;豎梁的最大變出現在底部,形量為22.55mm,因偏移迭代直接影響到了手爪整體工作的安全性和穩定性。
《四庫》共著錄明別集提要1092篇,其中《正目》著錄238篇,《存目》著錄854篇。[6]經初步統計,晚明范圍的僅268篇,9篇歸《正目》,259篇歸《存目》,遠遠未及《四庫》明人別集總量的三分之一。考慮到年代劃分的復雜性,本文僅討論提要中記載的隆慶后中進士的作者,被《四庫》歸入國朝的作者,則不作論述。
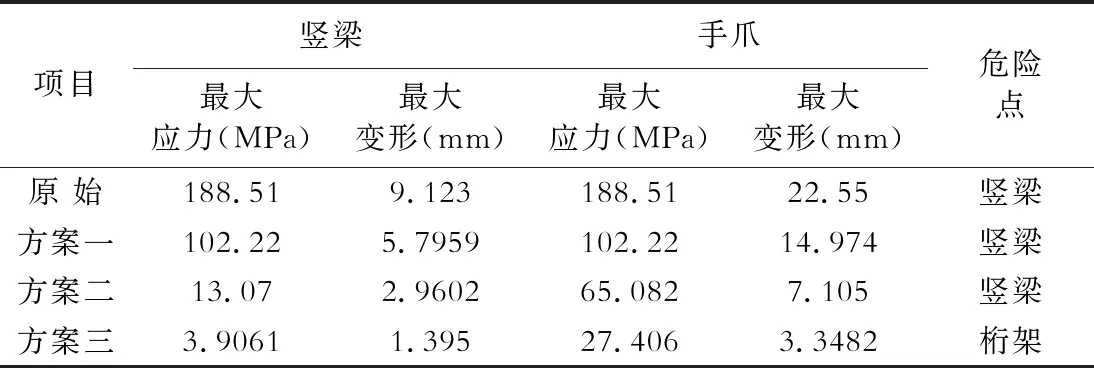
在結構不變,只更改豎梁材料屬性的情況下,方案一相比原設計強度上提高45.7%,剛度提高34.6%。在材料屬性不變,只更改滑柱結構的情況下,方案二相比原設計強度提高93%,剛度提高67.5%;在材料屬性和結構都改變的情況下,方案三相比原設計強度提高98%,剛度提高85%。由此說明,以豎梁為研究對象,本次優化過程中結構的優化和材料的合理選用都取得了理想的優化效果。
隨后,分別在三種方案的基礎上,參照有限元仿真對整體桁架機械手爪進行優化,手爪整體強度和剛度都獲得了理想的優化效果。最終,在該優化思路下,手爪的整體變形量和最大應力均小于許用值,且最大應力點和最危險變形點均轉移至桁架等其他非核心結構件,后期亦可通過桁架改性的方法進一步優化該桁架機械手的工作精度。
綜上,方案三為最優手爪結構方案,即在原始設計基礎上,采用空心圓柱加發散式加強筋結構的豎梁,并整體配用EN-AW1200鋁合金材料可確保該桁架式機械手爪設計的科學性與合理性。
6 結束語
本論文根據大型鑄造生產線生產需求,設計了一款桁架式剛性平動機械手爪。通過對初步設計結果的研究,判斷出該機械手爪并未滿足強度和剛度要求。經過進一步分析,發現對該機械手爪強度和剛度產生重要影響的結構件為豎梁。在此基礎上,設計出三種優化方案,使用Ansys Workbench對豎梁在危險工作姿態下的最大變形量和應力進行評估,進而實現對機械手爪設計結果的優化。綜合三種方案的討論,最終總結出桁架式機械手爪采用空心圓柱加發散式加強筋結構豎梁,并整體配用EN-AW1200鋁合金材料可滿足該桁架式機械手爪設計強度和剛度。使用Ansys Workbench輔助設計并優化機械結構,可有效降低機械設計的難度,簡化設計研發過程,提高機械設計的科學性和可靠性
。該方法將有效簡化機械設計工作,對提高設計效率具有重要的現實意義。
[1]蔣文凱.基于ANSYS的重型框架式制管成型機主機分析與優化[J].鍛壓裝備與制造技術,2021,56(04):42-48.DOI:10.16316/j.issn.1672-0121.2021.04.008.
[2]韓瀟,蔣東霖.汽車五軸變徑擰緊機械手結構設計[J].機械研究與應用,2021,34(03):67-70.DOI:10.16576/j.cnki.1007-4414.2021.03.017.
[3]張超,單鑫,崔國禮,李金泉.四自由度工業機械手結構設計[J].成組技術與生產現代化,2021,38(01):28-32.
[4]趙忠玉,葛占福.淺析四自由度物料搬運機械手的初步設計[J].世界有色金屬,2017(17):282-283.
[5]王凌琳,袁慶霓,劉葉艷.基于ANSYS Workbench的雙立柱堆垛機結構分析及優化[J].機械設計與制造,2016(02):217-220.DOI:10.19356/j.cnki.1001-3997.2016.02.058.
[6]洪品. 機械手爪的有限元建模與振動特性分析[D].上海工程技術大學,2016.
[7]李云江,馬孝林,程鋼,郭吉冬.六自由度機械手爪位置誤差分析與結構優化[J].煤礦機械,2015,36(11):196-198.
[8]姜振廷. 六自由度帶電作業機器人的運動仿真及動力特性分析[D].山東建筑大學,2014.
[9]呂玉梅,李冬霞,秦偉.基于ANSYS的高層建筑結構位移可靠度分析[J].石家莊鐵路職業技術學院學報,2008,7(04):30-33.
[10]王開德,韓凱凱.基于ANSYS Workbench的磨床立柱結構分析與優化設計[J].制造業自動化,2018,40(10):64-69.