基于IIVSSLMS低軌衛星導航增強系統數字域自干擾對消算法研究
2022-09-09 01:45:30孟祥芳易卿武
無線電工程 2022年9期
關鍵詞:信號
孟祥芳,易卿武,謝 松,朱 研
(1.河北科技大學 信息科學與工程學院,河北 石家莊 050018;2.衛星導航系統與裝備技術國家重點實驗室,河北 石家莊 050081)
0 引言
全球導航衛星系統(Global Navigation Satellite System,GNSS)[1]作為獲取空間信息的重要基礎設施,其定位精度只能達到米級,僅依靠GNSS很難滿足自動駕駛和智慧農業等高精度領域的實用需求。
低軌衛星(Low Earth Orbit,LEO)的發展為解決上述問題提供了思路,低軌星座能夠與中高軌GNSS星座形成互補,可以顯著提高GNSS的精度、完好性、連續性和可用性[2],低軌導航增強(LEO-NA)技術已經成為衛星導航領域的關注熱點,美國[3]、歐洲[4]和國內[5-6]多個機構對此展開了系統性的研究。實現該技術需要在低軌衛星上搭載導航增強載荷,來播發雙頻導航增強信號,增強信號頻率一般選擇L波段。但是,播發L頻段導航增強信號會對低軌導航增強載荷正常接收信號產生干擾,這里稱之為自干擾。因此,研究低軌導航增強載荷干擾對消技術以避免自干擾成為推動低軌高精度定位實際應用的關鍵。自干擾對消技術主要包括空域、模擬域和數字域自干擾對消技術。目前,學界已經對空域和模擬域自干擾對消技術進行了大量的研究[7-8],關于數字域自干擾對消的研究相對匱乏,而空域和模擬域并不能完全抑制干擾,剩余干擾需要在數字域中進一步消除。
數字域自干擾對消技術主要分為基于信道估計的干擾對消和自適應干擾對消2種,其中,基于信道估計的自干擾對消技術又分為基于導頻信號的信道估計和基于自適應濾波算法的信道估計2種。文獻[9-11]均采用基于導頻信號進行信道估計的方式,這些方法存在帶寬利用率低、時效性差的問題,為此,研究人員提出了一系列采用最小均方(Least Mean Square,LMS)[12]算法進行信道估計的干擾對消方案,LMS算法具有原理簡單、計算復雜度低和易于實現等優點,成為應用最廣泛的自適應濾波算法[13]。文獻[14]提出了基于譜成型的自適應數字干擾對消方法,該算法基于傳統的LMS算法,存在收斂速度與穩態誤差相互制約的問題。文獻[15]為了改善這一不足,提出了基于迭代變步長LMS的數字域自干擾對消算法,在保證穩態誤差較小的情況下有效提高算法的收斂速度,但是該算法中步長因子臨界值的選取需要發射信號的先驗知識。文獻[16]在文獻[15]的基礎上,提出了一種基于迭代變步長變換域的最小均方算法,但是依賴發射信號先驗知識的問題依然存在。
基于LMS算法進行信道估計不需要占用額外的帶寬,易于實現,但同時也存在收斂速度和穩態誤差相互制約的問題。為了更好地平衡LMS算法收斂速度和穩態誤差,近年來關于變步長LMS算法的研究被相繼提出。在文獻[17-18]提出的變步長LMS算法中,在算法的初始階段令步長為較大值以提高收斂速度,在收斂時間附近采用較小的步長來減小穩態誤差,但是這些算法容易受到相關噪聲和其他因素的影響。文獻[19]提出了一種基于Sigmoid函數的變步長LMS自適應濾波算法,該算法在步長參數和誤差信號之間建立了非線性函數關系,并根據誤差信號之間的相關性調整步長,使步長不受相關噪聲的影響。文獻[20]提出了一種新的變步長LMS自適應濾波算法,通過調整濾波系數和步長因子,保證加快收斂速度的同時減小了穩態誤差。
綜合考慮上述方案的優點和不足,本文提出了一種改進的迭代變步長最小均方(Improved Iterative Variable Step-size Least Mean Square,IIVSSLMS)數字域自干擾對消算法,并將其應用到低軌衛星導航增強系統中,用于解決導航增強信號和低軌導航增強載荷正常接收信號產生的自干擾問題。該算法通過在初始階段將步長因子固定為較大值,提高了收斂速度,并利用當前誤差信號和上一步誤差信號的自相關估計共同調節步長因子,在降低突發脈沖干擾產生的不利影響的同時減小了穩態誤差。仿真結果表明,該算法有較快的收斂速度和較大的干擾對消比。
1 數字域自干擾對消原理
數字域自干擾對消的原理框圖如圖1所示。
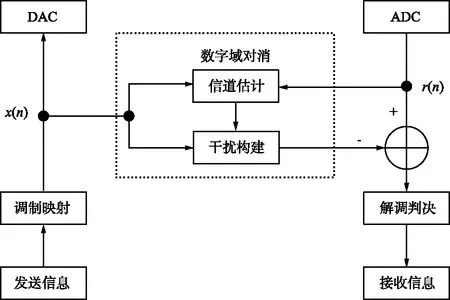
圖1 數字域自干擾對消原理框圖Fig.1 Schematic block diagram of digital-domain self-interference cancellation
采用LMS算法進行信道估計的數字域自干擾對消的基本思路為:首先采用LMS算法得到估計的自干擾信道沖激響應,然后自干擾信道沖激響應結合發射信號得到重構的自干擾信號,最后在接收信號中減去重構的自干擾信號,實現數字域自干擾對消。接收到的數字基帶信號為:
r(n)=x1(n)+d(n)+ε(n)=
x(n)wM+d(n)+ε(n),
(1)
式中,x(n)為由發射信號構成的L×M維Toeplitz矩陣;wM表示M階自干擾信道響應,為M×1維;x1(n)為模擬域干擾對消后剩余的L×1維自干擾信號向量;d(n)為正常接收的信號,即期望信號,ε(n)為加性噪聲,二者均為L×1維;r(n)為模擬域干擾對消后的L×1維接收信號向量,接收信號由剩余的自干擾信號、正常接收信號和噪聲組成。
干擾對消后得到的誤差信號,即LMS算法的反饋誤差,由接收信號和估計的自干擾信號之間的差值表示,誤差信號為:
(2)
LMS算法濾波系數的更新公式為:
(3)
2 基于IIVSSLMS的數字域自干擾對消
本節主要對IIVSSLMS算法進行詳細描述。采用IIVSSLMS算法能夠在數字域解決低軌衛星導航增強系統中導航增強信號對低軌導航增強載荷正常接收信號產生的自干擾問題。該算法通過對自干擾信道進行估計得到自干擾信道沖激響應,然后結合發射信號得到重構的自干擾信號,最后將重構的自干擾信號從接收信號中減去來實現干擾對消。在算法的初始階段(本文取200,迭代次數n為2 000),將步長因子固定為較大值(本文在參數(1)的條件下取0.8,在參數(2)的條件下取0.75),用來提高收斂速度,當迭代次數超過200時,采用迭代次數和當前誤差信號與上一步誤差信號的自相關估計共同調節步長因子,使步長因子維持在一個較小的范圍內,從而在消除不相關噪聲向量對收斂性能不利影響的同時減小系統的穩態誤差。本文通過對箕舌線函數[21]變形,得到步長因子:
(4)
式中,a和β為常數,當a和β發生變化時,μ(n)和e(n)的關系分別如圖2和圖3所示。由圖2可知,a越大,誤差在接近于0時變化越劇烈,從而導致步長發生突變,影響系統穩態性能,所以a的取值不應過大,同理β也需要合理選擇。
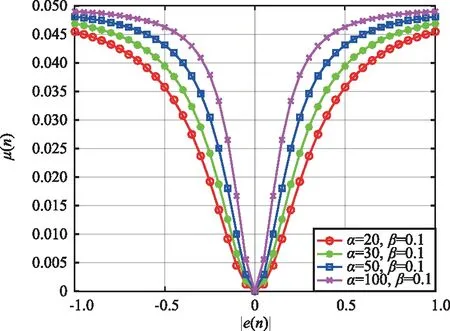
圖2 參數a的取值對步長因子的影響Fig.2 Effect of parameter a value on step factor

圖3 參數β的取值對步長因子的影響Fig.3 Effect of parameter β value on step factor
在初始階段,取較大的步長因子使收斂速度提高的同時也會造成系統的穩態誤差增大,為了改善這一不足,對權重進行歸一化處理,得到權重更新的表達式,即估計的自干擾信道沖激響應為:
(5)
式中,η是個非常小的整數,用于解決當x(n)太小時存在最小值的問題。由式(5)可知,估計的自干擾信道沖激響應由步長因子、發射信號以及誤差信號共同控制。
根據第2部分的數字域自干擾對消原理,給出了IIVSSLMS算法流程,如圖4所示。
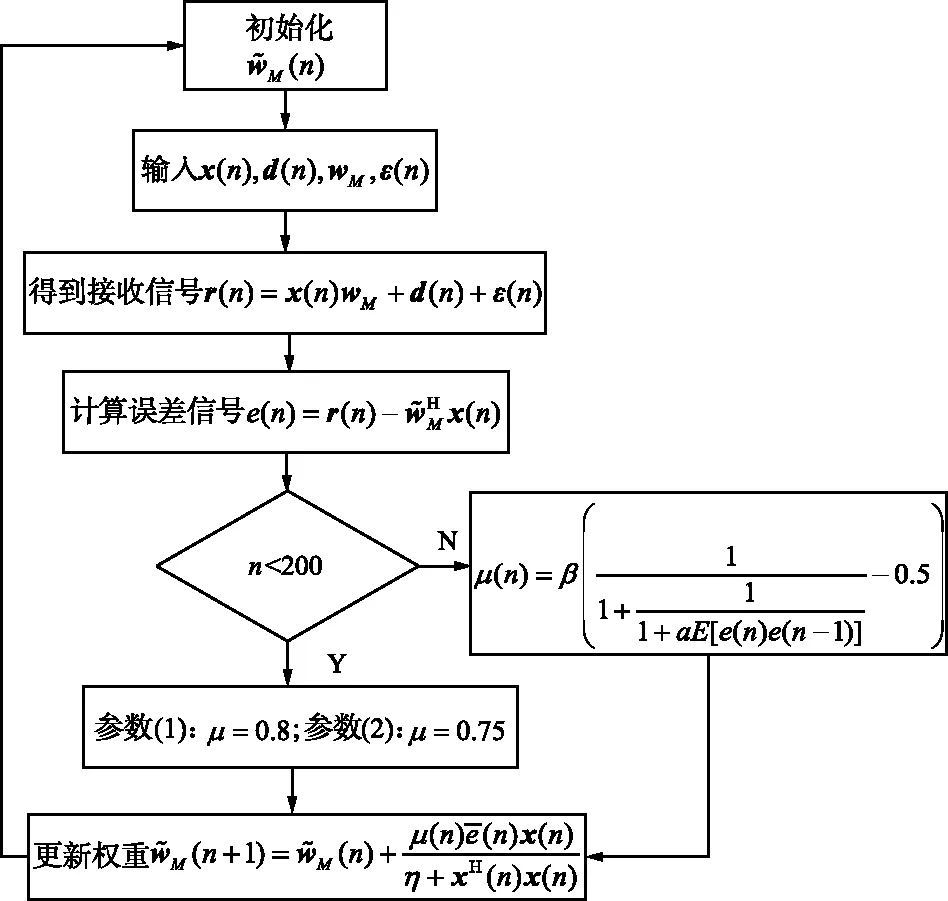
圖4 IIVSSLMS算法流程Fig.4 IIVSSLMS algorithm flow chart
基于IIVSSLMS數字域自干擾對消算法的詳細步驟為:
步驟1設置IIVSSLMS算法的信道階數M,并保證M不小于自干擾信道等效階數M′,根據低軌衛星導航增強系統中的參數確定a和β的最佳取值;
步驟3執行式(2),計算反饋誤差e(n);
步驟4步長迭代:
如果n<200,μ在參數(1)的條件下取0.8,在參數(2)的條件下取0.75,否則執行式(4);
步驟5執行式(5),更新估計的自干擾信道沖激響應。
3 性能分析
主要從理論層面分析基于IIVSSLMS低軌衛星導航增強系統中數字域自干擾對消算法的性能,并推導IIVSSLMS算法的收斂因子和穩態條件下干擾對消比(Interference Cancellation Ratio,ICR)的表達式。

根據接收的自干擾信號是發送信號通過信道wM得到的,因此得到誤差信號為:
(6)
式中,y(n)=d(n)+ε(n),其均方誤差為δ2。

e(n)=mH(n)x(n)+y(n),
(7)
E{|e(n)|2}=E{|mH(n)x(n)+y(n)|2}=
E{mH(n)x(n)xH(n)m(n)}+δ2=
E{mH(n)Rm(n)}+δ2,
(8)
式中,R=E{x(n)xH(n)}是x(n)的統計平均自相關矩陣,為共軛對稱矩陣。
對R進行對角化,得到:
(9)
式中,U為酉矩陣;λj為R的特征值;Λ為對角矩陣。
再令M(n)=UHm(n),得到:
(10)
由于R=UΛUH,m(n)=UM(n),對式(8)化簡得:
E{|e(n)|2}=E{MH(n)ΛM(n)}+δ2=
(11)
式中,tr(·)表示矩陣的跡,以此類推得到:
E{MH(0)ψ(n)M(0)}+
(tr[φ(0)+…+φ(n-1)]+1)×δ2,
(12)
式中,
(13)
由于酉矩陣不改變矩陣的跡,則對式(12)進行變形,得到:
E{|e(n)|2}=E{mH(0)ψ(n)m(0)}+
(14)
式中,
0≤j≤M-1,
(15)
0≤j≤M-1。
(16)
(17)

(18)
(19)
由于當n≥N時,μ′很小,所以有2-μ′≈2,對式(19)進行化簡得到:
(20)
因為干擾對消比的定義為ICR=10lg(Pn前/Pn后),其中,Pn前和Pn后分別表示系統相消前輸入的自干擾信號功率和系統相消后輸出的剩余自干擾信號功率。設接收信號的功率為Pr=PI+δ2,則IIVSSLMS算法收斂狀態下的干擾對消比為:
(21)
4 實驗仿真與結果分析
為了評估本文提出的基于IIVSSLMS數字域自干擾對消算法的性能,采用Matlab進行仿真,并將本文算法與文獻[15,19-20]中的變步長LMS算法在收斂速度和干擾對消比2個方面進行比較。ICR反映了系統對消性能,對于低軌衛星導航增強系統,ICR越大,隔離效果越好。
4.1 參數設置
采用GPS信號作為導航增強載荷正常接收的信號,即期望信號,自干擾信號采用與期望信號偽碼不同的GPS信號,并設信干比(Signal-to-Interference Ratio,SIR)為-70 dB,信噪比(Signal-to-Noise Ratio,SNR)為-20 dB,載波頻率為80 kHz,采樣率為400 kHz,使用QPSK進行調制,不考慮非線性和ADC量化噪聲的影響。參考文獻[15],將自干擾信道設置為萊斯信道,傳播路徑個數為4,包括3條多徑,對應的K因子、路徑延時和損耗分別為[1 2 0.5 0.02],[2.5 4 7 10]×ts,[-15 -29 -46 -53],其中ts為fs的倒數,fs為采樣率。根據先驗知識,本文設置自干擾估計信道的沖激響應的階數為20。為了表示收斂速度,更直觀地體現算法收斂性,將ICR曲線中的橫坐標迭代次數n等價轉換為時間t,其中t是由n和ts相乘得到。本節所有結果均是由200次蒙特卡羅仿真實驗所得。
在上述仿真條件下,將本文提出的IVSSLMS算法與文獻[15,19-20]中的變步長LMS算法進行比較。依據文獻[15,19-20]中參數設置的原則,對這3種算法的參數進行適當的調整,以上4種算法的具體參數如表1所示。
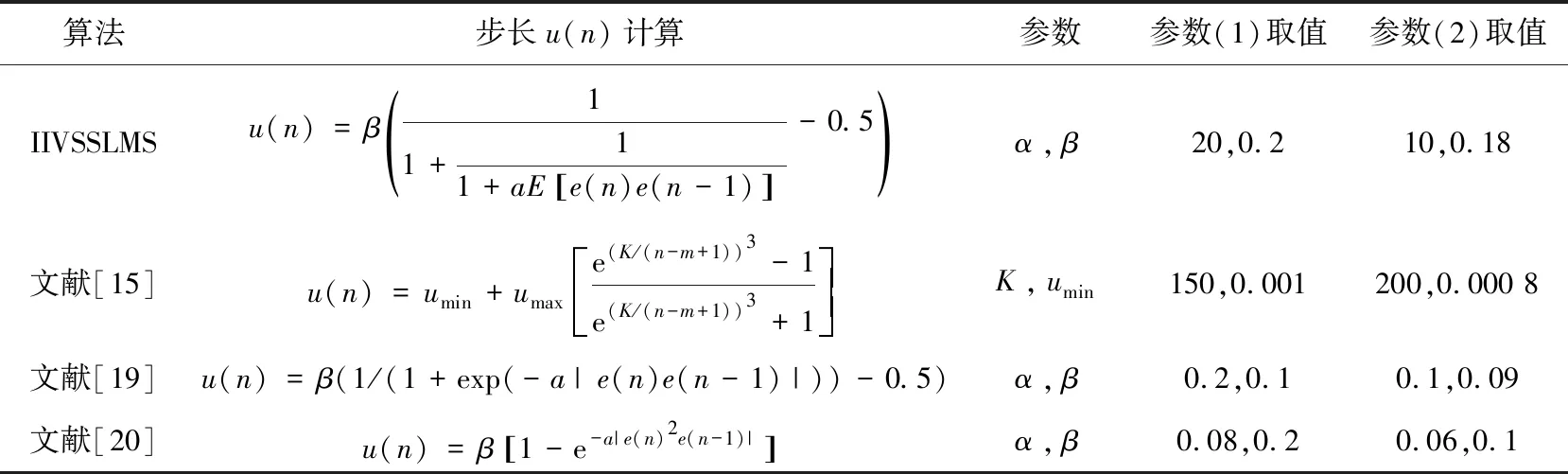
表1 各算法對應的參數取值
4.2 收斂速度和干擾對消比性能分析
通過統計平均200次獨立仿真結果,得到在參數(1)和參數(2)條件下IIVSSLMS算法與已有的3種變步長LMS算法性能對比結果如表2所示,在不同參數下4種算法的ICR收斂曲線分別如圖5和圖6所示。
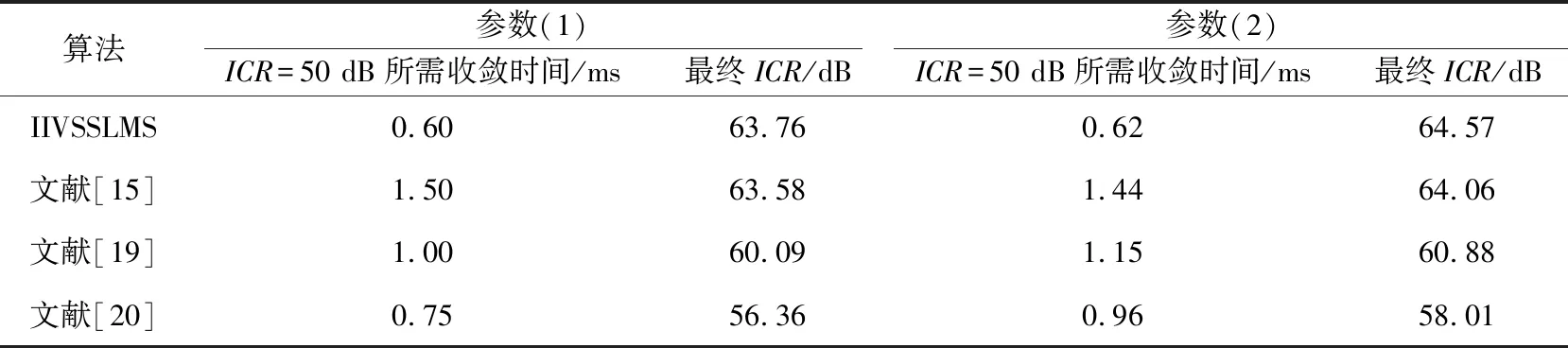
表2 算法性能對比
綜合圖5和表2可以得出,在參數(1)條件下,IIVSSLMS穩態的ICR為63.76 dB,略低于式(21)的理論值,IIVSSLMS與文獻[15]相比,穩態的ICR僅提高了0.18 dB,但是IIVSSLMS在ICR=50 dB時所用時間比文獻[15]縮短0.9 ms,收斂速度提高了2.5倍;與文獻[19-20]相比,穩態的ICR分別提高了3.67,7.4 dB,在ICR=50 dB時所用時間分別縮短0.4,0.15 ms。綜合圖6和表2得出,在參數(2)的條件下,IIVSSLMS與文獻[15]相比,穩態的ICR提高了0.51 dB,在ICR=50 dB時所需時間縮短了0.82 ms;與文獻[19-20]相比,穩態的ICR分別提高了3.69,6.56 dB,在ICR=50 dB時所用時間分別縮短了0.53,0.34 ms。IIVSSLMS和文獻[15,19-20]中的算法相比,在收斂速度和對消比上均占有一定的優勢,這是由于本文所提IIVSSLMS算法在初始階段設置步長因子為較大值,提高了收斂速度;之后由迭代次數和當前誤差信號與上一步誤差信號之間的自相關估計協同控制步長因子,使步長因子維持在一個較小的范圍內,減小了系統的穩態誤差。
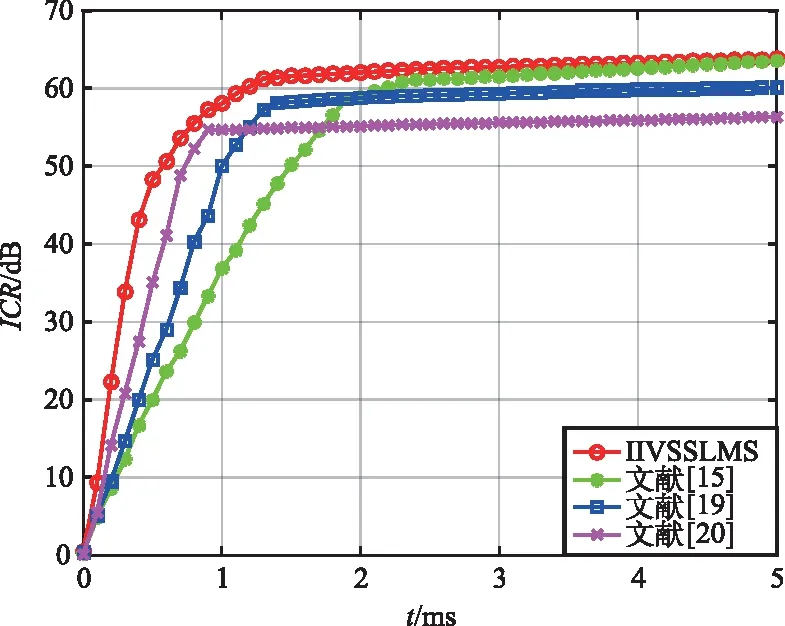
圖5 參數(1)對應的4種算法ICR曲線Fig.5 ICR curves of four algorithms corresponding to parameter (1)
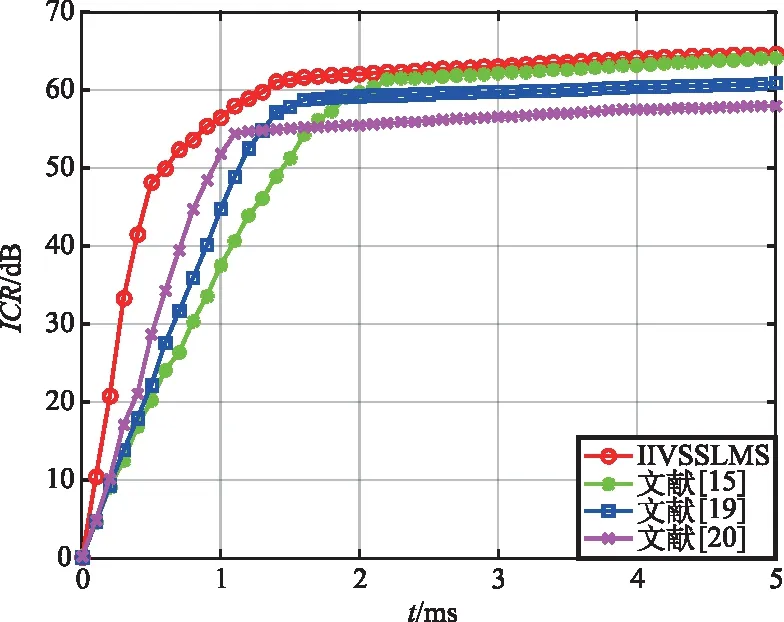
圖6 參數(2)對應的4種算法ICR曲線Fig.6 ICR curves of four algorithms corresponding to parameter (2)
5 結束語
本文提出了一種基于IIVSSLMS數字域自干擾對消算法,可以有效消除低軌衛星導航增強系統中的自干擾。該算法利用迭代次數和當前誤差信號與上一步誤差信號的自相關估計共同調節步長因子,使步長因子在初期為較大值,之后保持在較小的范圍內,很好地平衡了收斂速度和穩態誤差,并通過不斷地更新自干擾信道沖激響應,來獲得最佳的自干擾信道參數,提升干擾對消性能。為了體現算法的有效性,本文與已有變步長LMS算法進行了比較,仿真結果表明收斂速度可以提高2.5倍,干擾對消比可以提高7.4 dB。在下一步工作中,將在數字域中考慮ADC器件造成非線性影響的同時,結合模擬域和空域因素,研究低軌衛星導航增強系統中的自干擾對消。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06