基于國產隨鉆陀螺儀的軌跡測調技術研究及應用*
2022-09-14 07:59:28喻貴民
石油機械 2022年8期
喻貴民
(中海石油(中國)有限公司天津分公司)
0 引 言
隨著渤海油田增儲上產,調整井數量日益增多,同時外掛井槽及外加樁腿等使得井間距越來越小,目前部分槽口間距已由1.8 m×2.0 m縮小至1.5 m×1.7 m,進一步導致井眼軌跡交碰以及鉆穿鄰井套管事故風險增大,易造成重大事故及經濟損失[1-3]。傳統處理淺層防碰主要通過錯開造斜點、KEEPER陀螺復測軌跡、牙輪鉆頭過防碰段、調靶及隔水導管表層預斜等技術。其中KEEPER陀螺與MWD相比能有效抗磁干擾,但需要在鉆遇存在防碰風險、無法通過井段時,使用電纜下入陀螺坐鍵于坐落接頭上,測量井眼軌跡井斜角與方位角,該方法在軌跡不確定時需要電纜下一次陀螺,得到一個單點靜態數據,不僅浪費鉆井正常時間,而且鉆桿內拉陀螺要求井內鉆具靜止,易造成卡鉆、井塌及溢流等復雜情況的發生[4-6]。能解決該問題的國外相關技術受到封鎖,國內亦無成熟應用產品,開展海上叢式井防碰作業只能靠租用國外儀器,服務費用高昂,容易受制于人[7]。因此“十三五”期間,筆者在陀螺隨鉆測斜系統原理的基礎上進行工程化研制,開發了一套具有自主知識產權,且適合國內作業特點和需求的隨鉆陀螺測斜系統,并實現了工程化應用。
1 國內外研究現狀
通過“十二五”期間GMWD-01隨鉆陀螺測斜系統的樣機研制,掌握了陀螺姿態測量方法、電源管理、井下狀態控制及大排量條件下信號傳輸等關鍵技術,但在儀器尺寸、耐溫、耐壓和作業方式等方面與實際工況仍然存在很大差距,需要進行大幅度的改進才能滿足實際鉆井作業需求[8-10]。
目前國外生產、銷售陀螺姿態測量儀器并進行技術或現場服務的代表廠商主要有Gyro Data和Scientific Drilling兩家公司。這兩家公司的產品代表著陀螺姿態測量產品的最高水平,近年來在國內只提供服務,不進行銷售[11]。
由于隨鉆陀螺應用關鍵技術為軍工技術,國外擁有隨鉆陀螺的公司對國內禁售,國內僅有具備軍工背景的石油高端儀器制造商具備其研制條件。目前國內航天慣性公司在陀螺測井領域一直持續進行隨鉆陀螺的研究,該公司同時擁有自主研發的MWD系統,產品布局完整,具備獨立研制隨鉆陀螺測斜系統的實力。
隨鉆陀螺測斜儀為集電氣、機械、液壓及慣性技術于一體的復雜系統,其研究存在諸多難點,主要體現在適應鉆井環境的慣性傳感器研制、高精度的姿態測量自尋北技術、液壓脈沖信號編制及發生技術、鉆井環境下動態軌跡測量技術等關鍵技術難點。
2 隨鉆陀螺系統及關鍵技術
2.1 系統構成
隨鉆陀螺測斜系統由井下系統(見圖1)和地面儀器兩部分構成[12]。地面儀器主要由主機(室內)和工具面指示器(野外)組成。井下儀器中整個系統的核心為探管,其通過內部慣導器件(高精度光纖陀螺儀和高品質石英撓性加速度計)的羅經效應,感應地球的自轉角速度和重力加速度,獲得井眼坐標系和地理坐標系之間的姿態角度。井下系統通過姿態測量短節測量井眼軌跡參數,軌跡參數等信息通過脈沖發生器以鉆井液壓力脈沖形式傳遞到地面,地面儀器將井眼軌跡信息進行準確解碼、處理、顯示,為司鉆提供鉆進姿態參數指示,為鉆井決策提供依據,實現軌跡精確控制。

1—脈沖器;2—連接筒;3—陀螺探管;4—電池;5—磁性探管;6—電池開關。圖1 隨鉆陀螺測斜儀井下系統組成Fig.1 Composition of gyro-while-drilling downhole system
2.2 傳感器小型化研制
傳感器包括陀螺儀、石英撓性加速度計、精密編碼器、步進電機、精密導電滑環、壓力傳感器等主要傳感器。其中,陀螺儀和石英撓性加速度計為該系統的核心傳感器。
針對陀螺儀轉子小型化設計需求,國內首次采用薄壁轉子磁滯電機技術,研制了外徑僅14.4 mm的微型轉子,如圖2所示。通過優化轉子熱處理工藝及外殼材料優選,提高了磁性能及啟動力矩;完成了橋電路小型化設計,如圖3所示。橋電路耐溫125 ℃,最大外徑小于16 mm。
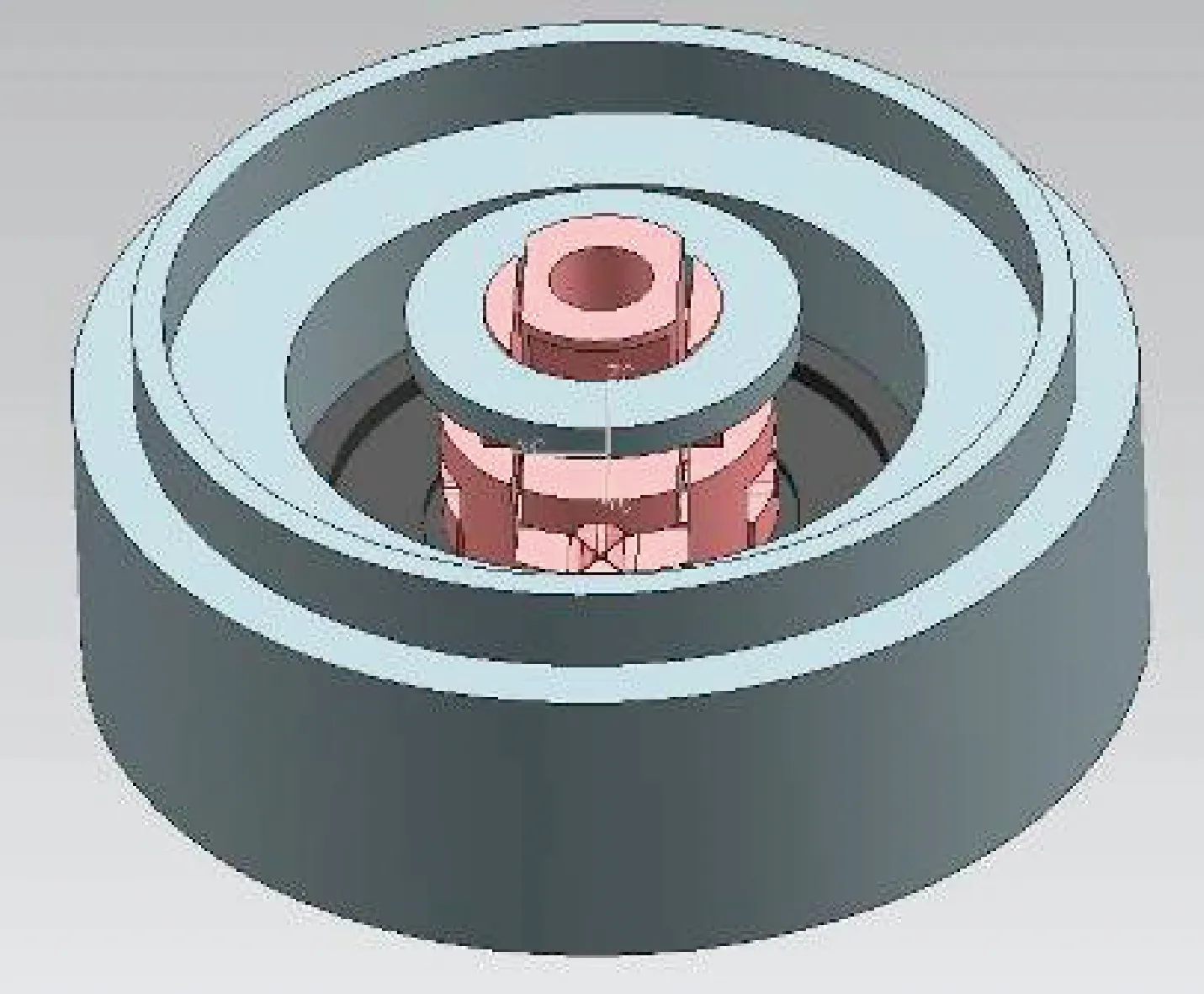
圖2 轉子組件Fig.2 Rotor assembly

圖3 橋電路Fig.3 Bridge circuit
針對陀螺儀撓性接頭抗振設計,首次采用十字細頸撓性接頭技術,接頭抗沖擊性能達到750g,抗隨機振動性能為25g,比傳統圓孔細頸撓性接頭的力學性能提高3.7倍。十字細頸撓性接頭應力分布情況如圖4所示。
圖4 十字細頸撓性接頭應力分布圖Fig.4 Stress distribution of cross-neck flexible joint
針對陀螺儀力矩器進行了優化,首次采用低溫度系數力矩器技術,標度因數溫度系數降低至40.8×10-6/℃。采用軸向單磁鋼和軸向線圈設計,實現了小體積大力矩,完成了力矩器線圈的彎形和粘接工藝方法研究。軸向力矩器結構如圖5所示。

圖5 軸向力矩器結構圖Fig.5 Structure of axial torque device
陀螺儀整體包含表頭(見圖6)和控制電路。表頭由轉子組件、傳感器力矩器組件、驅動組件和橋路板等組成。研制的陀螺儀外形尺寸為?19 mm×22 mm,為國內同類產品中最小尺寸。

圖6 陀螺儀表頭Fig.6 Gyroscope head
2.3 自尋北技術
自尋北技術通過測量地球自轉角速度及其分量來確定方位,其優點是每個測點上的方位測量都獨立,無累積誤差[13]。進行隨鉆陀螺儀自尋北技術的研究需先進行自尋北技術算法的研究,做如下假設:
m=Ωcosφ(cosψcosθcosγ+sinψsinγ)+
Ωsinφsinθcosγ
(1)
n=-Ωcosφ(cosψcosθsinγ-sinψcosγ)-
Ωsinφsinθsinγ
(2)
p=gsinθcosγ
(3)
q=-gsinθsinγ
(4)
則方位角的計算公式為:
a=(np+mq)cosθ=-Ωgcosφsinθcosθsinψ
(5)
b=mp-nq-Ωgsinφsin2θ=
Ωgcosφsinθcosθcosψ
(6)
設cosθ>0,則有:
(7)
式中:θ為傾斜角,(°);Ω為地球自轉角速率,rad/s;φ為方位角,(°);γ為工具面角,(°);g為重力加速度,m/s2。
本文基于“編碼器+陀螺儀”組合識別閉環控制技術,實現精確快速轉位控制,轉位時間縮短。基于零速修正的卡爾曼濾波算法,實現快速識別傳感器常值漂移誤差,并用于解算誤差補償,提高系統測量精度。自尋北技術原理如圖7所示。
圖7 自尋北技術原理Fig.7 Principle of north-seeking technology
2.4 電池包設計
利用1組鋰電池(每組8節,每節3.6 V)組合設計電池組,為井下儀器供電。為了延長供電時間,在系統連接后,電池包不立即供電,需要在系統工作的時候才進行供電,因此設計了特殊開關,如圖8所示,該開關同時起到定心、緩沖和減震的作用,采用防誤插的接插件,方便現場操作并具備良好的密封性。通過現場測試,系統連續作業時間達到150 h,遠超國內外同類產品的續航能力。
圖8 電池包開關結構示意圖Fig.8 Schematic diagram of battery pack switch structure
3 試驗測試
為了測試隨鉆陀螺儀的穩定性和可靠性,對其抗振性能、抗沖擊性能及耐高溫性能進行了試驗測試。
3.1 抗振性能試驗
針對研制的隨鉆陀螺儀進行了抗振性能試驗,試驗圖片如圖9所示。試驗振動測試量級為24.87g(隨機振動,振動時間15 min)。

圖9 隨鉆陀螺儀振動測試圖片Fig.9 Vibration test picture of gyro-while-drilling
隨鉆陀螺儀振動試驗數據如表1所示。
表1 振動試驗數據Table 1 Vibration test data
根據試驗數據,TN-10隨鉆陀螺儀敏感軸輸出在振動前后數據變化量滿足合格判據的要求,隨鉆陀螺無機械損傷,這說明陀螺儀滿足使用要求。
3.2 抗沖擊性能試驗
為驗證隨鉆陀螺儀的抗沖擊性能,對陀螺儀進行了抗沖擊試驗,試驗數據如表2所示。

表2 沖擊試驗數據Table 2 Impact test data
根據試驗數據,TN-10隨鉆陀螺儀敏感軸輸出在沖擊前后數據變化量滿足合格判據的要求,陀螺無機械損傷,這說明陀螺儀滿足使用要求。
3.3 耐高低溫性能試驗
根據現場條件,溫度測試范圍為-20~125 ℃,高、低溫度點的保溫時間2 h,溫升的變化斜率為3 ℃/min、溫降變化斜率為1 ℃/min;被測儀器在升溫和保溫階段通電測試、在降溫階段不通電;試驗共進行了10個循環工作過程。試驗結果表明,每個組件產品經過10個循環均能正常工作,無故障。
4 唐71-46井現場應用
該井為冀東油田一口開發井,距離渤海海岸2.0 km,目的層位于館陶組,設計井深1 419 m,實鉆井深1 390 m,最大井斜39°,一開?311.2 mm設計鉆進至401 m,374 m起鉆,二開?215.9 mm井段鉆進至1 390 m完鉆。
井下測井儀器串包括:打撈頭+扶正器+陀螺方位短節+扶正器+電池短節+扶正器+MWD短節+扶正器+鉆井液脈沖發生器,其中電池短節為井下儀器供電,陀螺方位短節可測量井斜和方位,測量數據可與MWD對比校正以驗證其準確性,為了盡量避免影響現場生產井正常鉆井作業,此次試驗打撈頭、扶正器、MWD短節、鉆井液脈沖發生器由井隊提供,試驗只提供陀螺方位短節和電池短節,儀器外徑48 mm,隨鉆陀螺探管長度2.03 m。
2020年10月17日20:00,隨鉆陀螺儀一開入井,18日上午9:00鉆進至374 m出井,一開入井時間共計13 h,入井后儀器工作正常,信號傳輸正常,一開過程無復雜情況發生。
10月20日2:00,隨鉆陀螺儀二開入井,22日上午6:00鉆進至1 390 m出井,二開入井時間共計52 h,入井后儀器工作正常,信號傳輸正常,二開過程無復雜情況發生。
二開隨鉆過程共進行8次陀螺隨鉆數據測試,每次測試需停泵5 min,并且保持井下鉆具靜止,然后開泵傳輸數據,數據傳輸速率0.5 bit/s,為盡量保證現場生產井正常定向作業,設置傳輸序列時,將隨鉆陀螺數據設置在最后,保證開泵時優先傳輸MWD數據。開泵后約10 s,地面接收到井下信號并進行同步,大約8 min后開始傳輸陀螺隨鉆數據。MWD數據與GMWD數據對比如表3所示。
表3 隨鉆陀螺測試數據對比表Table 3 Comparison of gyro-while-drilling test data
與MWD相比井斜差值在0.04°~0.10°之間,方位差值在1.13°~2.00°之間,精度設計符合要求,但還有一定需完善之處,不排除MDW本身誤差及MWD與陀螺短節之間存在2 m電池短節造成的誤差。另外,此次儀器入井65 h,電池供電作業正常。
國產隨鉆陀螺儀在冀東油田唐71-46井實際應用中測量井斜誤差小于0.1°,方位誤差小于2.0°,隨鉆測斜精度堪比電纜陀螺精度,儀器信號傳輸平穩,目前井下隨鉆時間長達65 h,隨鉆深度深達1 390 m。隨鉆陀螺儀下一步將在渤海油田推廣應用,必將成為鉆井井眼軌跡的新式防碰利器。
5 結 論
(1)針對電纜陀螺在海上軌跡防碰測量中的局限性問題,分析了隨鉆陀螺在軌跡測量中的優勢,指出了隨鉆陀螺國產化的研究方向。
(2)完成了傳感器小型化設計,為國內同類產品最小尺寸。系統綜合應用“編碼器+陀螺儀”組合識別閉環控制技術、基于零速修正的卡爾曼濾波算法、自尋北技術以及電源智能管理技術,連續作業時間長達65 h。
(3)隨鉆陀螺儀在冀東油田唐71-46井的實際應用中,測量井斜誤差小于0.1°,方位誤差小于2.0°。該隨鉆陀螺儀隨鉆測斜精度堪比電纜陀螺精度,儀器信號傳輸平穩,應用效果良好,具有廣闊的推廣應用前景。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45