硬式空中加油作動系統技術現狀與研制探討
2022-09-16 12:18:18滕利強
空軍工程大學學報 2022年4期
關鍵詞:系統
滕利強
(航空工業慶安集團有限公司,西安,710077)
從1923年誕生的第一架DH-4B加油機[1]算起,空中加油機已擁有近百年的發展歷程,到如今形成了兩種截然不同的空中加油方式:軟管-錐套式(簡稱軟式)空中加油[2]和伸縮套管式(簡稱硬式)空中加油[3]。兩種空中加油方式相比,硬式空中加油的速率通常是軟式空中加油速率的3倍,可以達到4 500 L/min左右,能夠極大地縮短加油時長,并具有抗氣流擾動能力強和方便加油對接等優勢。
當前,包括我國在內的主要航空強國都能夠研制軟式空中加油機,而能夠研制硬式空中加油機的只有美國和法國,相關的硬式空中加油系統則是其中的關鍵制約因素,因此,國內外眾多學者針對該系統從不同方面展開了研究工作。國外文獻[4-6]對KC-135加油機的硬式空中加油伸縮套管動態特性進行了建模仿真研究;文獻[7]介紹了KC-10加油機硬式空中加油作動系統的控制特點和試驗驗證方法;文獻[8]針對A330MRTT加油機的硬式空中加油作動系統組成進行了介紹,并提出了一種電力供給方案;文獻[9]從建模、傳感器、控制策略、仿真與試驗測試等方面進行分析,總結了硬式空中加油系統的未來發展趨勢;文獻[10]對硬式空中加油系統的協調控制進行了建模仿真研究。國內文獻[1]在20世紀90年代對國外加油機的發展歷程和空中加油設備行了簡單介紹,并提出了后續尚待解決的問題;文獻[11]針對KC-135加油機硬式空中加油作動系統的組成進行了簡單介紹,著重對控制系統進行了分析研究;文獻[12]對多型加油機的軟式和硬式空中加油設備進行了對比分析,但僅涉及到兩型硬式空中加油設備且較為籠統;文獻[13]對國內外硬式空中加油系統的建模與仿真研究情況進行了總結分析,但沒有涉及硬式空中加油作動系統的具體組成和技術特點;文獻[14]在對比國內外空中加油機現狀的基礎上,分析了我國加油機和空中加油系統的后續發展可能;文獻[15~16]在簡單介紹硬式空中加油裝置基本組成的基礎上,從操縱品質和動力學建模方面進行了仿真分析研究。綜上,可以看出國內外學者針對硬式空中加油系統或作動系統的理論研究較多,但是鮮見系統地研究硬式空中加油作動系統方面的文章。本文將從該視角對比分析現役主要加油機硬式空中加油作動系統的組成與技術特點,總結關鍵技術,并結合國內技術現狀,對研制硬式空中加油作動系統進行探討,以期為該系統的國產化研制提供有益探索。
1 研制硬式空中加油作動系統的主要影響因素
硬式空中加油作動系統作為實現硬式空中加油的關鍵系統,能夠控制加油伸縮套管進行收放、伸縮、俯仰和偏航運動,研制該系統主要涉及以下3方面的因素。
1.1 機械因素
受限于載機平臺的總體布局影響,硬式空中加油伸縮套管的結構類似一根單端鉸約束的薄壁細長桿。狹長的結構中不但布置有大口徑的加油傳輸管,還需布置大行程的伸縮傳動裝置、姿態調節作動器、信號與能量傳輸線纜或管路等零部件。因此,對相關裝置和零部件的結構提出了結構小和重量輕的設計要求。在加油對接時,伸縮套管的長度通常可以達到15 m左右,與普通戰斗機的長度相當,但長徑比卻大于17,在自身重力和氣動載荷的作用下存在著彈性變形,需要通過特殊的結構設計或機構設計來保證其內部機械傳動裝置的平穩性與可靠性。
1.2 控制因素
硬式空中加油伸縮套管安裝于機尾的紊流區域,加油對接時,伸縮套管除受紊流影響外,還會受到陣風影響,所受氣動力復雜。而伸縮套管本身又為薄壁細長桿,剛度較弱,在復雜氣動力的影響下會加劇伸縮套管加油管嘴端的振蕩,操控稍有不慎就會損傷受油機。加油對接后,加油管嘴處還會產生對接應力,過大的應力除易造成相關機械結構磨損或結構破壞外,加油脫離時還易造成甩鞭現象,危及加/受油機的安全。因此,對加油員的操控技能或系統控制的魯棒性提出了較高的要求。
1.3 安全因素
硬式空中加油作動系統所控制的伸縮套管安裝于機尾下部,具有結構長和重量大的特點,若控制功能失效,伸縮套管會在自身重力作用下下垂,大幅超過加油機的外廓尺寸,極易危及加/受油機的裝備安全或人員安全。因此,在系統設計時必須有針對性的對控制伸縮套管在不同自由度運動的子系統進行充分的失效危害性評估,通過合理的系統架構設計、故障監控設計或故障-安全設計等方法來保證系統的安全性。
2 主要硬式空中加油作動系統組成與特點
從20世紀50年代,波音公司以B-29轟戰機為平臺而研制的具有硬式空中加油作動系統的KB-29P加油機算起,包含硬式空中加油作動系統的加油機及其系統主要經歷了如圖1所示的四個發展階段。
前兩個階段受限于機身平臺,加油員以趴姿目視操作,硬式空中加油作動系統采用機械液壓作動技術;到KC-10加油機,機身平臺開始采用空間更大的寬體客機,加油員以坐姿目視操作,而硬式空中加油作動系統則開始利用電傳操縱技術;發展到當前最先進的KC-46A和A330MARTT加油機,加油員采用遠程視頻影像系統進行操作,后者不僅實現了全自動硬式空中加油,硬式空中加油作動系統也已全面采用功率電傳技術。下面將對當前現役主要加油機的硬式空中加油作動系統組成和技術特點進行梳理分析。
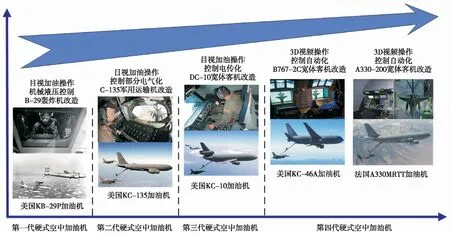
圖1 硬式空中加油機及其硬式空中加油作動系統發展趨勢
2.1 KC-135加油機
該型加油機是波音公司于20世紀50年代以C-135軍用運輸機為平臺而研制的一款具有硬式空中加油系統的專用空中加油機,當前仍是全球服役數量最多的空中加油機[17-20]。該機的硬式空中加油作動系統架構如圖2所示,系統的組成與技術特點如下所述,作動所需功率源來自于機上的21 MPa液壓系統。
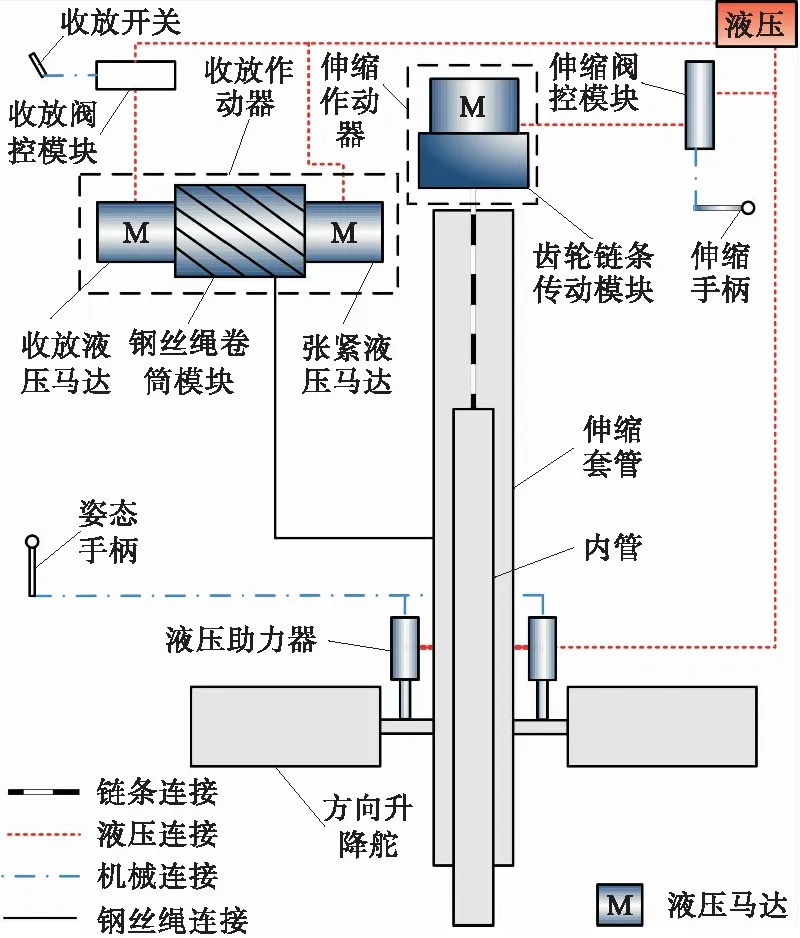
圖2 KC-135加油機硬式空中加油作動系統架構
2.1.1 收放作動子系統
該系統主要由收放閥控模塊和收放作動器等組成,可在收放開關的作用下對伸縮套管進行收放控制。加油對接前,伸縮套管在該系統的控制下被提前下放到距離飛機尾部水平夾角30°的位置,后由伸縮和姿態調節子系統進行控制。
2.1.2 伸縮作動子系統
該系統主要由伸縮閥控模塊和伸縮作動器等組成,可通過伸縮手柄對內管進行伸縮控制。系統所控制的伸縮套管外管長約8.5 m,內管長約5.6 m,全部伸出時套管總長約14.3 m。加油對接后內管可隨對接軸向力隨動,并且為保證設備安全,內管在伸出與收進極限位置處設計有彈簧阻尼緩沖裝置。
2.1.3 姿態調節作動子系統
該系統所驅動的舵面為兩塊組合成“V”型[21]的方向升降舵,利用舵面的同向或異向偏轉對伸縮套管進行俯仰和偏航控制,舵面由液壓助力器驅動。系統可通過姿態手柄控制伸縮套管在俯仰-10°~10°、偏航-15°~15°的包線范圍內進行姿態調節,此時伸縮套管類似一個飛行器,具有飛行器的空氣動力學特性。
KC-135是美軍現役最老型號的空中加油機,機上的硬式空中加油作動系統主要采用機械技術和液壓機械技術實現控制信號傳遞和能量轉換,因此導致系統的零部件數量較多,降低了系統的可靠性與維護性。
該型加油機采用“V”型舵面對伸縮套管進行俯仰和偏航控制,以減少姿態調節所需舵面、助力器和機械傳動線系的零部件數量,從而減輕伸縮套管的總重量。而為了保證系統機械傳輸的穩定性和可靠性,以及各個子系統的傳輸精度、傳輸距離、傳輸載荷和安裝空間等不同設計需求,該機的收放作動子系統通過鋼絲繩卷筒傳動來實現長距離機械傳輸,伸縮作動子系統通過齒輪鏈條傳動來實現伸縮套管的防打滑機械傳輸,姿態調節作動子系統則通過鋼絲繩索傳動來保證控制信號的傳遞精度,且后兩個子系統均根據自身特點設計有機械自動張緊裝置,以保證機械傳動線系能夠自動適應伸縮套管的彈性變形,并可防止傳動線系松弛。
加油對接操作時,驅動舵面偏轉的液壓助力器是通過鋼絲繩索進行控制信號的傳遞。長期使用會因機械摩損而增大控制環節的死區,影響控制精度,并易引發控制突變,加之伸縮套管的低剛度特性,故該型加油機對加油員的操作技能要求較高。在強干擾氣流環境下操作稍有不慎就會損傷受油機的涂層或蒙皮,這從公開報道的圖片或視頻中可出看出,但該缺陷對于常規戰機來說是能夠容忍的。加油對接后,管嘴處所產生的對接應力則是利用機械方法進行被動消除,通過管嘴后端的關節軸承結構進行有限角度范圍的消除。
由于該型加油機研制于20世紀50年代,受限于傳感技術、控制技術和系統安全性設計理念等因素的影響,硬式空中加油作動系統中的重要功率單元——收放作動器和伸縮作動器僅采用單液壓馬達進行驅動,該方式無法保證系統的收放功能和伸縮功能具有較高的安全性,控制功能失效后容易造成伸縮套管的自由下落。
2.2 KC-10加油機
該型加油機是美軍為彌補KC-135的不足而采購的麥道公司(后并入波音公司)產品。該機是麥道公司于20世紀70年代末以DC-10寬體客機為平臺而研發的一款具有硬式空中加油系統并兼有運輸功能的空中加油機[22-23]。
機上的硬式空中加油作動系統首次采用了硬桿控制計算機(boom control computer,BCC)和電傳操縱技術,所有的控制指令都以電信號形式傳輸。該系統的架構如圖3所示,系統的組成與技術特點如下所述,其中各子系統的主要功能與KC-135相同,作動所需功率源同樣來自于機上21 MPa液壓系統。
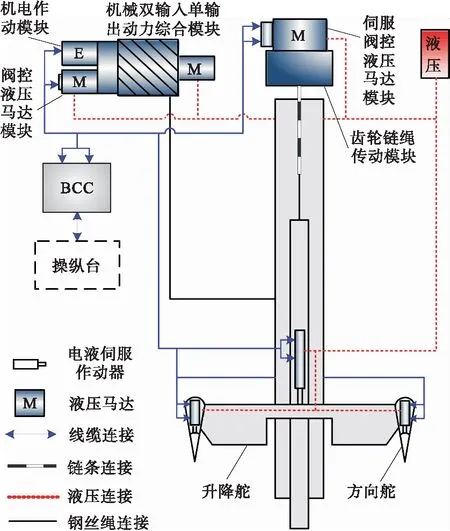
圖3 KC-10加油機硬式空中加油作動系統架構
2.2.1 收放作動子系統
該系統主要由閥控液壓馬達模塊、機電作動模塊、機械雙輸入單輸出動力綜合模塊、鋼絲繩卷筒模塊、張緊液壓馬達和BCC中的相應電子控制單元等組成,對接前的下放角度與KC-135相同。
2.2.2 伸縮作動子系統
該系統主要由電氣兩余度的伺服閥控液壓馬達模塊、齒輪鏈繩傳動模塊和BCC中的相應電子控制單元等組成。系統所控制的伸縮套管外管長約11 m,內管長約7 m,全部伸出時套管總長約17.7 m,比KC-135的伸縮套管更長,增加了加/受油機間的對接距離,提高了加油對接時的安全系數。
2.2.3 姿態調節作動子系統
該系統所驅動的舵面構型類似“H”型[20],即由一塊兩端帶有方向舵的升降舵組合體構成,舵面由電液伺服作動器驅動。與KC-135相比,該型舵面對伸縮套管的俯仰和偏航運動實現了解耦控制,而且偏航角度控制范圍也增大到了-25°~25°,這些改變增加了加油對接操作的便利性。
與KC-135相比,由于該型加油機的硬式空中加油作動系統采用了電傳操縱技術,因此消除了因控制信號傳輸而大量使用的機械和液壓機械零部件數量。故該型加油機上的“H”型舵面,雖然增加了舵面和作動器的數量,但沒有因此增加伸縮套管的總重量。根據系統的傳輸特點,伸縮和收放的作動部分仍采用機械傳輸,其中收放作動系統的機械傳輸方式與KC-135相同;而伸縮作動系統由于工作行程的增加,采用全鏈條傳輸會帶來增重問題,該機采用鏈繩結合的方式解決該問題,保留動力輸出端的鏈條傳輸仍可保證伸縮套管運動的平穩性,避免全鋼絲繩傳動所可能引發的打滑問題。
得益于電傳操縱技術和BCC的使用,以及控制技術和傳感技術的進步。該機通過合理設置位置傳感器和加速度傳感器來檢測伸縮套管的運動狀態,并將反饋信號引入BCC的增穩或控制增穩系統,通過控制環節來提高伸姿態調節作動系統抵抗外部干擾的能力,保證加油對接控制精度。而為了減小加油對接應力,該機通過自動負荷緩解系統(automatic load alleviation system,ALRS)來實現對接應力的主動調節,該系統通過加油管嘴處的力傳感器感應對接后的管嘴徑向力,反饋信號輸到BCC中與加油管嘴對應軸向的閾值進行比較,若超過門限則通過控制相應的舵面偏轉,降低該軸向的徑向力,使其維持在設定的范圍,同時也因此消除了加油管嘴斷開瞬間所產生的甩鞭現象[22]。
KC-10為了保證硬式空中加油作動系統電傳化后的安全性,系統整體采用電氣兩余度架構,具有一次故障-工作,兩次故障-安全的容錯能力[23]。系統的控制部分通過完善的故障監控設計和重要功能的飛行前測試,保證發出非受控指令的故障概率小于10-9/飛行小時[7]。而系統中的收放作動器則采用液壓與電力組成的雙作動功率輸入,保證收放作動功能的失效概率與控制部分相當。系統為了確保加油對接時的姿態調節安全,所涉及的舵面作動器利用兩個液壓串聯的電液伺服閥進行液壓控制和監控,保證控制部分能夠及時得到作動器的故障狀態并做出故障隔離或故障-安全處理,避免姿態調節時出現非期望運動損傷加油設備或受油機。
2.3 KC-46A加油機
上述兩型加油機的分別研制于20世紀50年代和70年代末,特別是KC-135所采用的技術較為落后,長期、高頻的使用也加速了兩型加油機的老化,增加了維護費用。為替換上述兩型加油機,美軍于2019年開始采購波音公司以B767-2C寬體客機為平臺而研制的一款具有硬式空中加油系統的KC-46A多用途空中加油機[24]。
由于該型加油機采用了許多新技術,且存在著交付趕進度方面的問題,由此帶來了許多技術問題。在美軍的裝備使用中發現,該機不但存在機身平臺方面的技術問題,而且硬式加油作動系統也存在著控制抖動問題,嚴重影響了空中加油對接操作。雖然該型加油機采用了許多新技術,但相關的硬式空中加油作動系統則是延用了已在KC-10上成熟應用的電傳操縱技術,系統架構和組成也與KC-10相似[25],故不再贅述。
2.4 A330MRTT加油機
該型加油機是空客公司以A330-200寬體客機為平臺而研發的一款具有硬式空中加油系統的多用途空中加油運輸機。從公開報道可知,該機的整體性能優于KC-46A,相關的硬式空中加油作動系統已在A310MRTT加油測試機上完成了全球首次全自動硬式空中加油飛行測試[26-27]。
機上的硬式空中加油作動系統與KC-10和KC-46A一樣,都采用了專用BCC和電傳操縱技術,但作動部分則全面采用了電功率作動,功率來自于機上兩路115 V/400 Hz交流電源,該系統的架構如圖4所示,系統組成與技術特點如下所述。
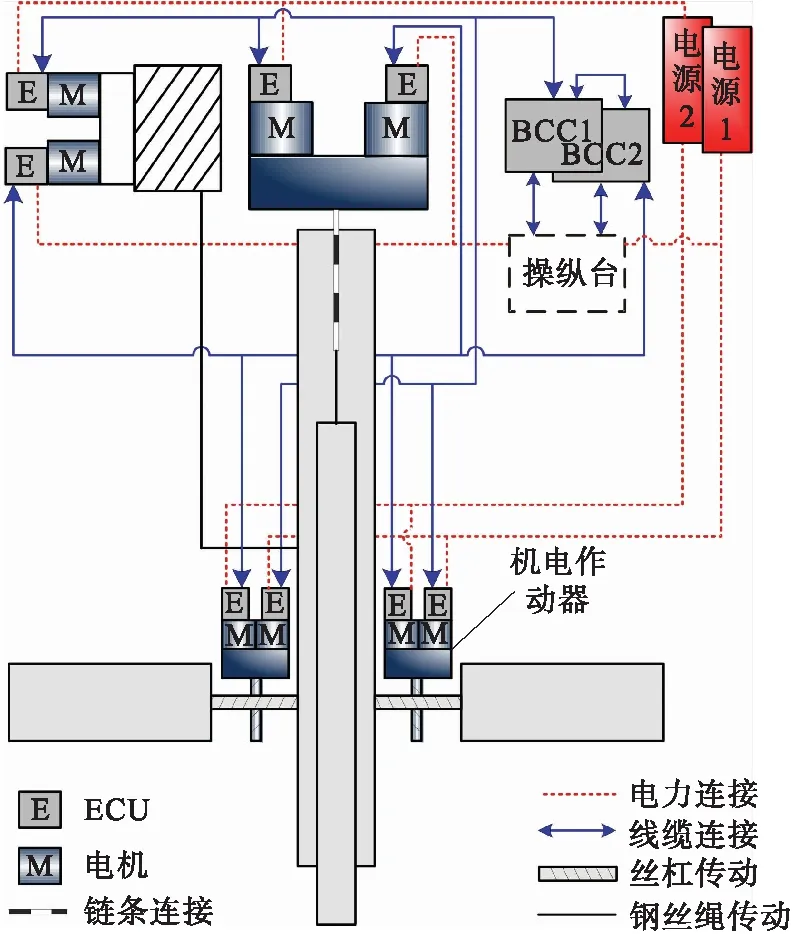
圖4 A330MRTT加油機硬式空中加油作動系統架構
2.4.1 收放作動子系統
該系統主要由帶電磁制動器的270 V直流永磁無刷電機、機械雙輸入單輸出動力綜合模塊、鋼絲繩卷筒模塊和相應電子控制單元等組成。加油對接時系統的下放角度與上述加油機相同。系統根據使用狀態分為3種工作模態。把持模態:此時系統的電子控制單元(electronic control unit, ECU)處于供電,電機和電磁制動器處于斷電把持狀態;正常工作模態:系統ECU可根據BCC的速度指令控制電機對伸縮套管實現收放控制;地面維護模態:用于該系統的地面手動操作。
2.4.2 伸縮作動子系統
該系統的驅動電機類型與上述子系統相同,在相應電子單元的控制下由機械雙輸入單輸出齒輪鏈繩傳動模塊進行動力綜合與輸出,所控制的伸縮套管在內管全部伸出時長約17 m。該系統具有4種工作模態。把持模態和地面維護模態的功能同上;正常工作模態:該模態下ECU可根據BCC的速度指令對伸縮套管的內管進行運動快慢控制;對接隨動模態:當伸縮套管與受油機對接后,系統可跟隨對接后的軸向載荷實現被動伸出、收進或把持。
2.4.3 姿態調節作動子系統
該系統所驅動的舵面構型與KC-135的“V”型相同,舵面作動器的類型與上述兩個子系統相同。系統3種工作模態中的把持模態和地面維護模態功能同上,正常工作模態非對接狀態下,系統根據BCC的控制指令驅動舵面,對接后系統在ALRS的作用下動態調節舵面。
與上述兩型加油機相比,A330MRTT的硬式空中加油作動系統也采用了電傳操縱技術,但作動部分則已經完全實現了電功率作動,消除了因液壓作動而需使用的液壓管路和液壓機械零部件。根據目前的技術,雖然相同功率的機電作動器比電液伺服作動器重,但是由于該型加油機的伸縮套管采用了“V”型舵面,與“H”型舵面相比,減少了舵面和作動器的數量。綜合來看,硬式空中加油姿態調節作動子系統并沒有因為采用電功率作動而增加伸縮套管的重量。剩余伸縮和收放作動子系統所必需的機械傳輸部分,由于沒有發生革命性的技術變化,故這兩個子系統的機械傳輸部分與KC-10和KC-46A相似。與美軍硬式空中加油作動系統的集中式架構相比,該機首次采用了分布式架構,將與各作動子系統緊密相關的電子控制部分從BCC中獨立出來,置于外場可更換單元ECU中,而ECU與作動器采用一體化或就近安裝,與BCC通過A429總線進行通信,不僅減少了作動與控制單元間的導線使用量,而且也減輕了伸縮套管中的導線重量,降低了所占空間,這對于空間狹小的伸縮套管尤為重要。
對于作動控制部分,該機同樣采用合理布置傳感器來檢測伸縮套管的運動狀態和受力狀態信息,通過控制律設計來保證系統的魯棒性并緩解加油對接應力。但不同的是將與各作動子系統密切相關的伺服控制、功率驅動、故障監控和余度管理等功能單元置于ECU中,將ALRS、增穩或控制增穩系統以及外部狀態感知傳感器的信號處理單元等則置于BCC中,由BCC根據操縱指令產生各子系統的控制信號。這種分布式的控制方式不僅降低了BCC的功耗發熱量,提高了BCC的可靠性,而且還優化了系統的控制律和控制電路,方便系統根據需要只對相關的部分軟件或硬件進行升級,提高了系統的保障性。例如,該機所最新具備的自動硬式空中加油能力,就是通過擴展BCC而實現的,BCC根據激光與紅外融合精確感知系統和增強視頻影像系統等[27-28]的反饋信號,實時獲取受油機與外部環境的狀態,自動規劃硬式空中加油作動系統的動作路徑,并將路徑轉換成系統進行收放、伸縮、偏航與俯仰運動的控制指令,過程中自動調節參數,以確保整個空中加油的作動控制精度。
該機為了保證硬式空中加油作動系統的安全性,系統整體也采用了電氣兩余度架構,電氣容錯能力與KC-10和KC-46A相同,其中的作動器均采用雙電機和雙電力供給的方式來保證收放功能、伸縮功能和姿態調節功能的失效概率與控制部分相當。由于采用了電功率作動技術,故導致控制部分的驅動電路比電液伺服驅動電路復雜,降低了控制單元的可靠性,但仍能夠保證控制部分發出非受控指令的故障概率滿足設計要求,達到小于10-8/飛行小時。當該系統的某個子系統全部控制功能或作動功能失效后,可通過作動器上的電磁制動器將作動器鎖定在故障位置,避免故障系統不受控而影響加油作業安全。
3 硬式空中加油作動系統關鍵技術
對第2節所述機型的硬式空中加油作動系統按表1進行歸納,并結合相關系統的技術特點,提煉出該系統主要具有以下關鍵技術。
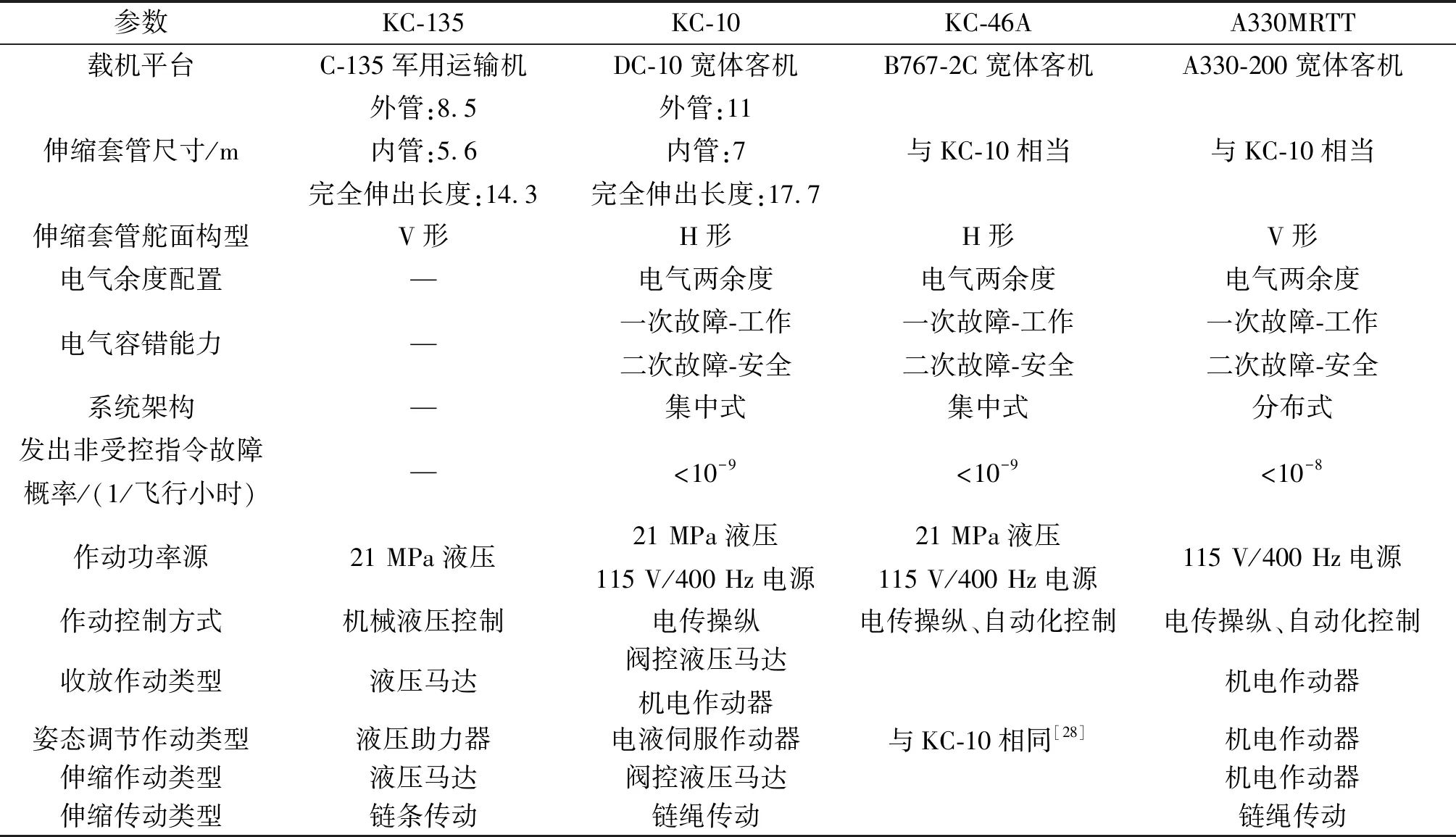
表1 典型加油機硬式空中加油作動系統主要指標對比
3.1 高功重比的作動設計技術
從上述主要機型的硬式空中加油作動系統技術發展特點可知,該系統雖然已經實現了電傳操縱,并呈現出全電作動和靈巧作動的發展趨勢,減少了機械零部件的數量,甚至消除了液壓零部件的使用,但在結構狹長的伸縮套管中仍需要集成安裝伸縮傳動裝置、ECU、姿態調節作動器和相關附件。因此,為了優化伸縮套管的內部空間,減輕伸縮套管的總重量,應充分利用當前成熟的輕質高強度材料、高功率密度電磁驅動技術、結構一體化成型技術、總線傳輸技術和高集成控制技術等新材料與新技術,在滿足作動功能、性能、安全性和可靠性需求的前提下,對硬式空中加油作動系統,特別是伸縮套管內的作動系統進行小型化、輕量化和一體化設計,以提高作動系統的功重比。
3.2 多干擾因素作用下的魯棒控制技術
硬式空中加油作動系統的電傳化操縱,雖然避免了機械操縱所帶來的非線性、重量大、尺寸大、力反傳和控制精度低等弊端,但是伸縮套管的細長結構特性,極易在飛行中產生彈性振蕩,影響加油對接作業,而振蕩的主要誘因有:紊流與突風環境、姿態運動和內管伸縮等。對接后,伸縮套管還會受到對接應力和燃油傳輸等因素的影響。上述因素不僅動態變化,且彼此耦合,增加了系統控制律的設計難度。為了保證系統控制的魯棒性,應充分分析被控對象的低阻尼、彈性振蕩和作業環境影響等因素,有針對性的進行控制律設計,并通過建模仿真、半物理仿真試驗和飛行試驗等方法迭代驗證。
3.3 高可靠的故障監控與余度管理技術
由于硬式空中加油作動系統屬于機上的任務系統,且從系統重量、體積、成本和影響飛機安全等因素考慮,電傳化的硬式空中加油作動系統通常采用電氣兩余度架構。而為了保證系統的安全性和電氣部分的可靠性,并具有一次故障-工作,二次故障-安全的電氣容錯能力,需要系統具有高可靠的故障監控和完善的余度管理能力。當前,電傳化系統主要依靠監控元件、監控電路和監控軟件等方法實現故障監控,并據此進行余度管理。可以看出,若控制系統本無故障,而是由于監控單元發生虛警也會導致系統余度降級,這對于只有電氣兩余度的加油作動系統來說會極大地降低系統的任務可靠性。因此,為了提高系統的故障監控能力,降低虛警率,在進行監控單元設計時,除了選擇成熟的監控技術和監控器件外,還應考慮系統所處的復雜機械環境、電磁環境和自然環境影響,并通過充分的試驗驗證優化故障監控設計,保證系統的任務可靠性。
4 研制國產硬式空中加油作動系統的探討
4.1 作動技術的選擇
從國外硬式空中加油作動技術的發展歷程來看,均采用了當時已在型號飛機機載作動系統中成熟應用的作動技術。如20世紀50年代研制的KC-135加油機,硬式空中加油作動系統采用了機械液壓作動技術;到20世紀80年代研制的KC-10加油機,硬式空中加油作動系統則采用了信號電傳液壓作動技術;發展到當前的A330MRTT加油機,硬式空中加油作動系統已全面采用了功率電傳作動技術。可以看出國外研制硬式空中加油作動系統所采用的作動技術路線清晰,沒有先于同時期的機載作動系統而率先采用新型作動技術,以保證硬式加油作動系統的可靠性和加油對接的安全性。綜合分析當前我國航空機載作動系統領域的技術現狀,并結合國外硬式空中加油作動系統的研制歷程,我國在研制該系統時可優先采用電液伺服作動技術,同時擇機開展大功率(不小于25 kW)機電作動技術的儲備研究,待技術成熟后,再拓展應用到硬式空中加油作動系統。
4.2 控制方式的選擇
波音和空客所研制加油機的硬式空中加油作動系統均采用了當時的成熟控制技術。如KC-135加油機,其硬式空中加油作動系統主要采用機械液壓控制技術;到KC-10加油機,硬式空中加油作動系統開始采用專用計算機和電傳操縱技術;再到A330MRTT加油機,硬式空中加油作動系統已能根據外部傳感系統的反饋信號,在先進算法的控制下實現全自動硬式加油對接作動,并呈現出智能化的發展趨勢。
波音作為全球最先研發和使用硬式空中加油作動系統的公司,從KC-135算起已擁有近70年的加油機研制經驗,但其最新研制的KC-46A加油機仍面臨著許多問題,如硬式空中加油作動系統在遠程視頻影像環境下存在控制抖動,逆光環境下無法準確操控,以及全自動硬式空中加油尚未工程化等。空客作為后來者,雖然研制歷程不及波音,但從2005年開始就以A310MRTT加油測試機對硬式空中加油作動系統進行充分的裝機飛行測試,包括后續的全自動硬式空中加油,都是在相關技術成熟后才應用到A330MRTT加油機上。我國作為硬式空中加油的入門探索者,無論是在研制經驗方面,還是在基礎技術方面,均不及波音和空客。因此,在控制方式的選擇上可結合國內技術現狀,秉承“技術成熟,充分驗證”的原則,并充分借鑒A330MRTT加油機硬式空中加油作動系統的研制經驗,先采用常規電傳操縱技術保證系統的穩定性與可靠性,后逐步實現新技術與作動系統的拓展融合。
4.3 系統架構的選擇
早期KC-135加油機的硬式空中加油作動系統主要采用液壓機械控制技術,系統架構沒有采用余度設計;到了后期的KC-10加油機,硬式空中加油作動系統采用了信號電傳操縱技術,系統設計為集中式、電氣兩余度架構;發展到A330MRTT加油機,硬式空中加油作動系統則采用了功率電傳操縱技術,系統設計為分布式、電氣兩余度架構,電功率驅動部分和BCC也都采用了物理獨立的兩余度設計,系統的架構設計更加完善。
可以看出,在硬式空中加油作動系統開始采用電傳操縱技術以來,并隨著安全性設計理念的深入,系統主要采用余度設計的方法來保證安全性。因此,我國在研制硬式空中加油作動系統時,可以借鑒相關產品的研制經驗,以及相似產品的研制成果。系統采用分布式、電氣兩余度架構,用比較監控技術提高故障監控覆蓋率,即系統控制部分的余度架構為2×2,兩個獨立的控制通道中都設計有一個指令支路和一個監控支路,兩個支路比較一致后輸出控制指令,該技術可保證系統的故障監控覆蓋率大于95%,能夠有效提升系統的安全性。采用上述電液作動技術和余度配置的硬式空中加油作動系統架構如圖5所示。
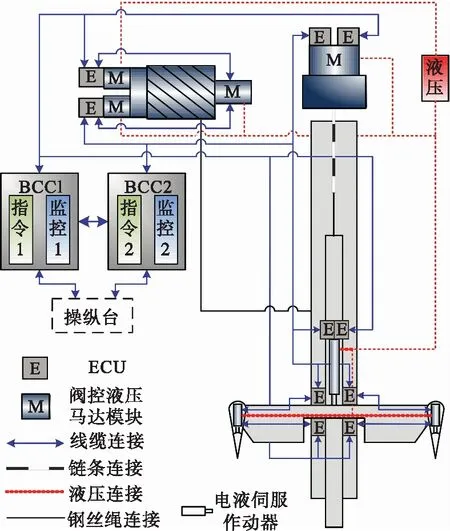
圖5 提議的硬式空中加油作動系統架構
5 結語
當前,波音公司與空客公司均已研制出了各自包含硬式空中加油系統的新型加油機KC-46A和A330MRTT,這兩型加油機的硬式空中加油作動系統都呈現出了載機平臺寬體客機化、控制自動化/智能化、功率電傳化和作動靈巧化的發展特點。目前,我國在研制硬式空中加油作動系統時,所面臨的關鍵技術和研制基礎,與歐、美這樣的航空強國還存在著一定的差距。因此,研制時應根據國內相關技術現狀,循序漸進、迭代更新,在保證系統安全性與可靠性的基礎上逐步拓展應用先進技術,從而能夠早日為我國的空中加油方式提供技術多選項,助力空軍戰略轉型。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32