探討公路橋梁項目底部裂縫智能檢測系統(tǒng)
2022-09-18 06:43:38洪貴林
交通科技與管理 2022年18期
洪貴林
(貴州黔程弘景工程咨詢有限責任公司,貴州 貴陽 550001)
0 引言
隨著使用時間的增加,公路橋梁難免出現(xiàn)各種病害,據(jù)統(tǒng)計公路橋梁中高達76%的損壞是由裂縫造成的。目前針對公路橋梁地面裂縫的檢測方法主要是人工檢測,該檢測方法成本高、效率低、檢測結果誤差大,無法有效保障橋梁使用安全[1-3]。橋梁檢測系統(tǒng)是一種新型的橋梁檢測工具,但現(xiàn)階段應用較多的是載人檢測車,其運行成本高、檢測人員安全風險大,檢測結果易受檢測人員主觀影響。因此,新型智能橋梁檢測車的研究意義重大。無人駕駛的智能化橋梁檢測車輛配備輕巧靈活機械懸臂結構,其工作成本低于常規(guī)檢測設備。更符合實際應用需求,具有更好的社會經(jīng)濟效益。
1 橋梁檢測車的發(fā)展及存在的問題
現(xiàn)有公路橋梁檢測車種類豐富,但均有不足之處。首先,現(xiàn)有檢測車輪無法實現(xiàn)無人駕駛,檢測時需檢測人員隨車達到檢測現(xiàn)場,為保證人員安全及活動空間,車輛懸臂結構強度及截面需滿足較高要求,導致桁架結構復雜笨重。制造檢測車輛時需配備安保裝置,生產(chǎn)成本大大提升。目前國內(nèi)檢測車機械臂長度在0~16 m之間,臂架多為1~2節(jié),隨著超寬公路橋梁項目的出現(xiàn),常規(guī)檢測車輛機械懸臂長度無法適應新的檢測需求。其次,如跨河公路橋梁地面貼近水面,檢測車機械臂無法到達橋梁底,檢測人員屬于高空作業(yè),安全風險較大[4]。最后,傳統(tǒng)的載人檢測車輛需要依靠檢測人員目測公路橋梁底面以判斷是否出現(xiàn)裂縫,如檢測人員疏忽大意或專業(yè)水平不過關很容易出現(xiàn)判斷失誤,導致檢測結果與實際情況偏差很大。因此,考慮到常規(guī)載人橋梁檢測車的諸多缺陷,國內(nèi)外業(yè)界及學術界都在持續(xù)研究新型智能無人駕駛橋梁檢測車的設計與制造。
2 智能橋梁檢測系統(tǒng)
該次研究的是一種用于公路橋梁裂縫檢測的智能化橋梁檢測系統(tǒng),該智能檢測系統(tǒng)示意圖見圖1。基于檢測車及機械臂,系統(tǒng)利用超高分辨率攝像機拍攝公路橋梁底面照片,再通過計算機處理后組合成完整的橋梁地面圖像,即在相關計算機軟件工具的幫助下檢測人員可以通過瀏覽方式拼接公路橋梁底面圖片,根據(jù)圖片確認公路橋梁底面是否存在裂縫,分析裂縫的發(fā)展情況[5]。
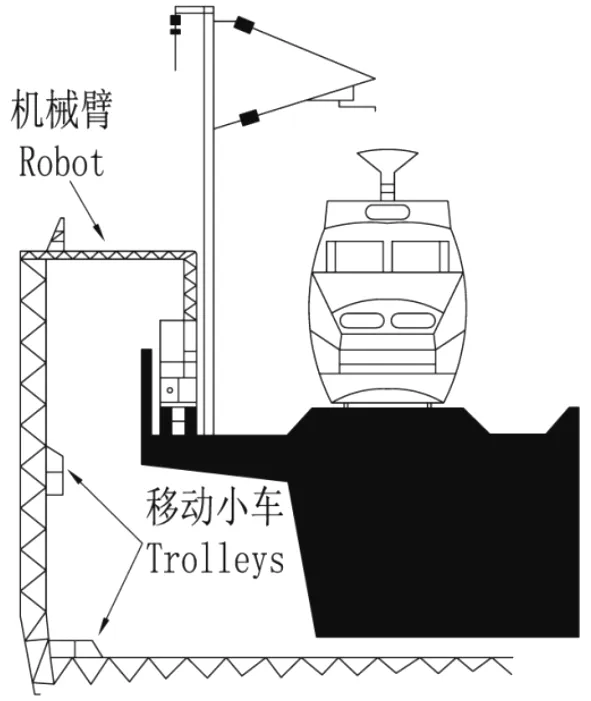
圖1 智能檢測系統(tǒng)
2.1 智能檢測車
為高效控制檢測車,該車輛采用輪式驅動,配有四個液壓驅動輪以及制動裝置,確保車輛能安全靈活移動。車輪的方向通過電動汽缸控制,全部車輪都同向轉動可使檢測車橫向平移。由于公路橋梁空間較小無法用護欄實現(xiàn)檢測車輛雙向制動,可在檢測車側向位置設置輔助輪,增加車輪與橋面的接觸面,實現(xiàn)更加靈活高效的制動。
檢測車駕駛艙位于車后端,表面采用的聚碳酸酯玻璃面板,厚8 mm,可有效抵御沖擊,同時盡量減輕自重,滿足工作強度要求。機械臂靜止或展開時檢測車可維持平衡,當機械臂位于橋護欄上時,需前伸適當長度的懸臂才能使檢測車身保持平衡[6]。
2.2 機械手臂系統(tǒng)
機械手臂的主要設計難點在于如何確保臂的靈活伸展,運輸階段的檢測車如圖2所示。通過分析公路橋梁空間及結構可知:機械手臂多數(shù)時間以較低速度展開,可忽略其動態(tài)研究,重點進行靜態(tài)研究,以有效保證位于橋梁護欄上方時機械臂不因伸展而導致檢測車側翻,機械臂伸展順序如圖3所示。
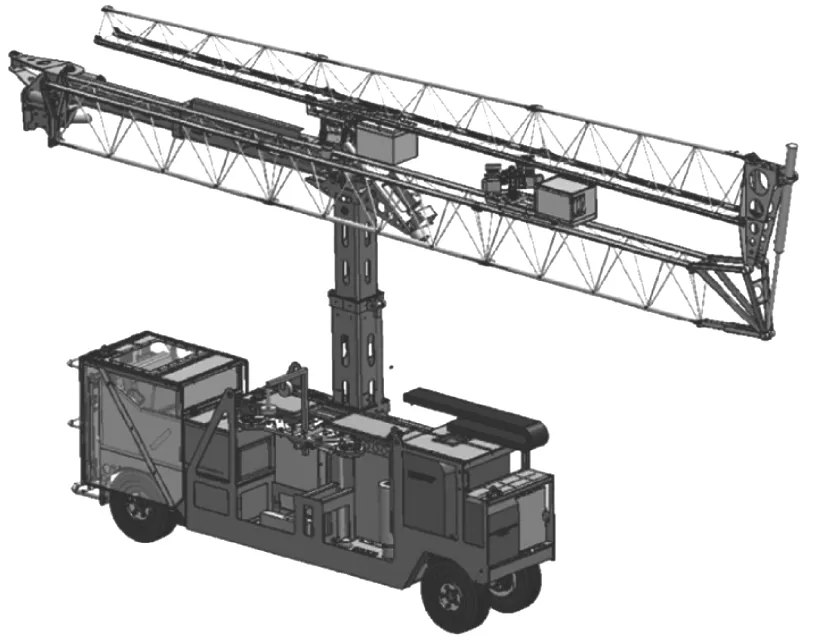
圖2 運輸階段的檢測車
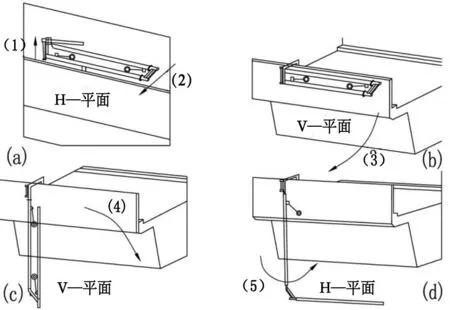
圖3 機械手臂展開順序
(1)首先機械臂從可伸展的豎直梁升起至圖3(a)標注的位置。
(2)通過豎直梁、前臂連桿之間的雙旋轉關節(jié)實現(xiàn)機械臂的水平橫移,使機械臂越過橋梁護欄至圖3(b)標注的位置。
(3)機械臂以垂直于V-平面的水平軸為中心旋轉實現(xiàn)機械臂垂直,即如圖3(b)所示的V-平面中移動直至圖3(c)標注的位置。
(4)在機械臂垂直面上順橋梁方向展開機兩臂連接之間的旋轉軸,使第二節(jié)機械臂水平,具體見圖3(d)。
(5)轉動機械連桿使第二節(jié)機械臂連接桿處于垂直于后縱軸的橋梁底部位置。
(6)不同橋梁的尺寸、形狀不同,機械臂連桿主要由長度為1 m、2 m的構件構成,可手動綁扎機械臂連桿,基于公路橋梁直徑確定機械臂長度[7]。
(7)兩輛拍照小車作垂直運動,獲取橋梁邊緣及底部照片,如圖4所示。小車以晶格結構作為引導機構,通過齒輪驅動,利用伺服系統(tǒng)控制攝像機的拍照動作。
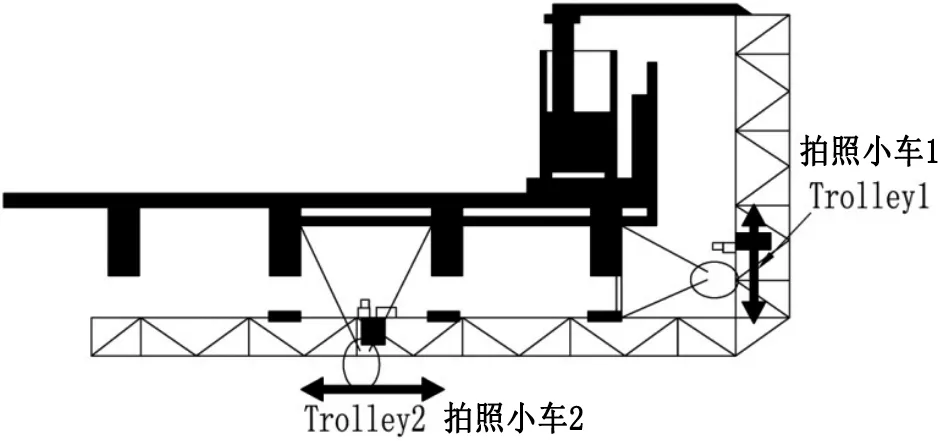
圖4 機械臂上的移動小車
2.3 圖像采集及分析處理系統(tǒng)
在計算機圖像采集及處理技術中,圖像拼接方法應用廣泛,可將攝像機獲取的多個照片拼成完整的單視點復合圖像,直觀逼真地呈現(xiàn)廣角圖像甚至全景圖像。目前主流圖像對齊與拼接算法主要包括直拼算法、特征算法。其中直拼算法的主要優(yōu)點是只處理有價值的圖像信息,可有效提高圖像對齊精度,獲得高精度圖像;特征算法的圖像拼接更快更準,圖像處理效率更高,可自動檢測圖像的疊加關系。但對于紋理差的圖像運用特征算法很容易造成圖像對齊及拼接效果變差甚至失敗。因此,該研究提出效率更高、結果更加可靠的圖像處理算法,該算法基于上述特征拼接算法,合理運用橋梁結構線型特征。通過試驗驗證該算法適合用于檢測公路橋梁底部裂縫。
勻速移動機械臂上的攝像小車,利用高分辨率CCD攝像機拍攝橋梁底部高清照片:
(1)檢測車輛移動到既定移動路線的起點,通過機械臂將智能檢測車移至橋梁底部既定位置。
(2)機械臂勻速移到移動路徑終點,移動過程中CCD攝像機獲取二維圖像、三維點云以及相關姿態(tài)數(shù)據(jù)[8]。
(3)智能檢測車、機械臂配合完成下一條運動路徑,再用第二條路徑的數(shù)據(jù)將機械臂回歸到路徑起始點。
(4)智能檢測系統(tǒng)可循環(huán)執(zhí)行上述步驟,合理移位實時獲得圖像數(shù)據(jù),最終覆蓋整個橋梁底部,短時間內(nèi)快速收集大量的橋梁底部圖像數(shù)據(jù)。圖5為數(shù)據(jù)采集系統(tǒng)。
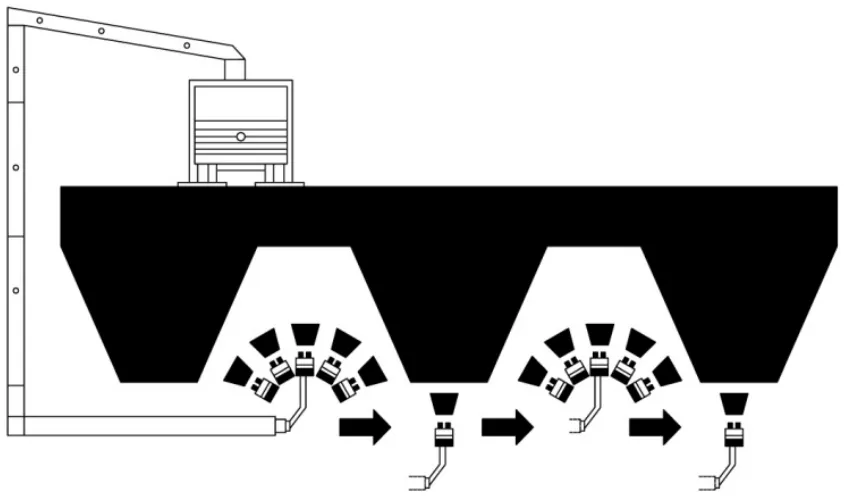
圖5 數(shù)據(jù)采集系統(tǒng)
基于攝像機獲取的一組橋梁圖像運用圖像算法拼接成完整清晰的橋梁底部圖像,開始拼接前須分類圖像,再組合成完整的橋梁結構全景圖,方便檢測人員通過目測或自動化檢測技術檢測橋梁底部的裂縫,評估其健康狀況。作為衡量公路橋梁結構健康狀況的關鍵因素,橋梁裂縫的檢測至關重要,因此必須通過算法將橋梁底部圖片對齊拼接成裂紋檢測全景圖[9]。運用圖像分析系統(tǒng)分析全景圖特征,找到橋梁底部裂縫,以確保檢測結果精準可靠,進而構建完整準確的公路橋梁結構健康狀態(tài)數(shù)據(jù)庫,方便檢測人員進行橋梁結構健康狀態(tài)評估,有效提升公路橋梁健康狀態(tài)評價和維護效率。
3 智能橋梁檢測車系統(tǒng)的發(fā)展前景
長期以來,目視檢查是檢測橋梁結構健康狀況的主要方法,通過人的視覺檢查橋梁結構存在較大的主觀性及不確定性,檢測結果可靠性不高。而且部分公路橋梁的底部結構比較復雜,目視檢測難度較大,很容易導致誤判。因此,借助高清工業(yè)CCD攝像機以及靈活移動平臺可以實時大范圍采集橋底部圖像,對其結構健康狀況進行檢測,具有方便、高效、安全等優(yōu)點。該文探討的智能化橋梁檢測系統(tǒng)可作為橋梁檢測人員的有效輔助工具,通過設置在機械臂末端的智能檢測工具采集橋梁底部圖像,再運用相應的圖像對齊拼接技術自動識別裂縫,根據(jù)系統(tǒng)識別結果快速準確地評估橋梁健康狀況[10]。
結合橋梁檢測實際需求可改進智能檢測系統(tǒng):
(1)結合圖像點特征、橋梁結構線型特征,優(yōu)化圖像姿態(tài)非常關鍵,但圖像點特征、橋梁結構線型特征的權重也至關重要,需采用更加高效穩(wěn)定的技術手段并盡量降低操作成本。
(2)當前應用的單調(diào)模型無法完全滿足檢測需要,需采取仿真模型、橋梁結構線特性分析等方法提高圖像分析效率。
(3)需找到更加高效的方法消除亮度差、色差,重點分析處理全景圖之間的疊加區(qū)域,避免分析整個圖像,以節(jié)省計算機資源,提高圖像處理效率,同時更好地控制圖像拼接線。
4 結論
綜上所述,隨著我國社會經(jīng)濟的持續(xù)發(fā)展、城市化建設進程不斷加快,各種跨河流公路橋面項目數(shù)量快速增加,對國民經(jīng)濟的發(fā)展起到了非常重要的促進作用。隨著使用時間的增加,很多公路橋梁結構安全性、持久性不容忽視。作為常見的橋梁結構病害,裂縫對公路橋梁結構的耐久性、安全性產(chǎn)生嚴重威脅。因此,該文重點針對公路橋梁結構裂縫智能化檢測進行研究,將裂縫作為評價橋梁健康狀況的主要指標,提出一種適用于道路橋梁裂縫檢測的智能化檢測系統(tǒng),針對該系統(tǒng)的主要結構及發(fā)展應用提出具有建設性、創(chuàng)新性的理念和想法,以促進橋梁裂縫智能化檢測技術的發(fā)展,更好地保障公路橋梁的使用安全。
猜你喜歡
商品與質(zhì)量(2021年43期)2022-01-18 05:31:32
石油瀝青(2021年4期)2021-10-14 08:50:40
當代工人(2020年8期)2020-05-25 09:07:38
人民交通(2019年16期)2019-12-20 07:04:10
湖南教育·A版(2019年4期)2019-05-10 03:31:44
小學生學習指導(低年級)(2019年4期)2019-04-22 03:28:24
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
中國公路(2017年12期)2017-02-06 03:07:33
山東工業(yè)技術(2016年15期)2016-12-01 05:31:04
科技知識動漫(2016年8期)2016-07-29 20:40:09
