非結(jié)構(gòu)環(huán)境下基于HoG與SVM的汽車油箱蓋視覺(jué)檢測(cè)方法
2022-09-19 01:31:02梁銘裕黃平劉修泉
機(jī)床與液壓 2022年8期
梁銘裕,黃平,劉修泉
(1.華南理工大學(xué)機(jī)械與汽車工程學(xué)院,廣東廣州 510640;2.佛山職業(yè)技術(shù)學(xué)院機(jī)電工程學(xué)院,廣東佛山 528137)
0 前言
隨著無(wú)人系統(tǒng)技術(shù)的發(fā)展,以人為主導(dǎo)的傳統(tǒng)模式向著以機(jī)器人為主導(dǎo)的智能化模式轉(zhuǎn)換。機(jī)器人技術(shù)的發(fā)展為加油站提供了新的服務(wù)方式——加油機(jī)器人,利用傳感器定位汽車及油箱門(mén)和油箱口,控制系統(tǒng)指揮機(jī)器人自動(dòng)完成加油。油箱蓋的識(shí)別不僅在無(wú)人智能加油站中有著較好的應(yīng)用前景,在未來(lái)電動(dòng)汽車的智能充電系統(tǒng)中也有潛在的應(yīng)用價(jià)值。張新良等采用形態(tài)學(xué)與Hough變換相結(jié)合的方法檢測(cè)圓形油箱蓋,該方法不能用來(lái)檢測(cè)任意形狀的油箱蓋并且油箱蓋尺寸以及油箱蓋與相機(jī)的距離范圍是規(guī)定的,在油箱蓋檢測(cè)中靈活性低。在自然光照條件下對(duì)油箱蓋進(jìn)行位置檢測(cè),需要先對(duì)圖像進(jìn)行增強(qiáng)處理以突出油箱蓋與覆蓋件之間的板縫區(qū)域。此類問(wèn)題類似于裂縫檢測(cè),通常先對(duì)圖像進(jìn)行增強(qiáng)處理再進(jìn)行裂縫特征提取和分析。周穎和劉彤采用圖像增強(qiáng)、形態(tài)學(xué)運(yùn)算、連通區(qū)域標(biāo)記和碎片拼接等方法實(shí)現(xiàn)裂縫檢測(cè)。TALAB等使用Sobel算子對(duì)混凝土圖像進(jìn)行濾波并使用Otsu閾值分割完成裂縫邊緣檢測(cè)。LIU等提出一種具有魯棒性的基于多尺度增強(qiáng)和視覺(jué)特征的裂紋檢測(cè)框架,先使用引導(dǎo)濾波和梯度多尺度增強(qiáng),再進(jìn)行閾值處理以提取裂縫。WANG等提出一種多種自適應(yīng)濾波和增強(qiáng)對(duì)比度的裂縫圖像處理方法,并采用Otsu的局部自適應(yīng)算法實(shí)現(xiàn)裂縫檢測(cè)。
在自然光照條件下采集到的包含油箱蓋的汽車圖像具有如下特點(diǎn):圖像對(duì)比度低,油箱蓋與汽車覆蓋件之間板縫較為模糊;有些汽車覆蓋件因?yàn)椴粷崈魧?dǎo)致表面粗糙度高,從而對(duì)光線反射不均勻,有些則過(guò)于光滑導(dǎo)致產(chǎn)生高反光區(qū)域;光照的變化和各種原因?qū)е碌脑肼晻?huì)對(duì)后續(xù)處理產(chǎn)生很大影響。數(shù)學(xué)形態(tài)學(xué)方法可以根據(jù)圖像感興趣目標(biāo)的形態(tài)特征增強(qiáng)圖像,保留有用信息的同時(shí)可以去除噪聲。據(jù)此,提出非結(jié)構(gòu)環(huán)境下基于HoG與支持向量機(jī)(Support Vector Machines,SVM)的汽車油箱蓋視覺(jué)檢測(cè)方法。采用多尺度底帽變換可以有效突出板縫信息并且濾去背景的影響,利用改進(jìn)的最大熵閾值分割與連通區(qū)域方法可以定位出目標(biāo)候選區(qū)域,再利用HoG特征和SVM分類以獲得準(zhǔn)確識(shí)別出汽車油箱蓋的效果。
1 油箱蓋檢測(cè)算法
油箱蓋檢測(cè)算法的流程如圖1所示。

圖1 汽車油箱蓋檢測(cè)算法流程
首先,采用最大值法對(duì)圖像進(jìn)行灰度化;接著,采用平均濾波法進(jìn)行去噪處理;然后,用多尺度底帽變換提取圖像暗細(xì)節(jié)特征;再用改進(jìn)的最大熵閾值算法求出閾值并進(jìn)行二值化;針對(duì)二值化圖像,通過(guò)連通區(qū)域分析得出目標(biāo)候選區(qū)域;最后,提取目標(biāo)候選區(qū)域的HoG特征描述子并輸入到SVM二分類器進(jìn)行精確檢測(cè)。
1.1 圖像預(yù)處理
1.1.1 灰度化
灰度圖是由白到黑不同灰度級(jí)組成的單色圖像,圖像中每一個(gè)像素只有一個(gè)灰度值。通常情況下,灰度級(jí)范圍為[0,255]。將RGB色彩空間圖像進(jìn)行灰度化,通常有以下4種方法:分量法、最大值法、平均值法和加權(quán)平均法。對(duì)于油箱蓋檢測(cè),需要提取油箱蓋與汽車覆蓋件之間的板縫,板縫在3個(gè)通道圖像中均具有相近的灰度而覆蓋件的灰度差別大。因此,采用最大值法可以提高板縫和覆蓋件的對(duì)比度,即:
=max{,,}
(1)
1.1.2 均值濾波
汽車圖像在采集過(guò)程中會(huì)受到各種噪聲干擾,影響后續(xù)檢測(cè)。圖像去噪過(guò)程即通過(guò)濾波算法去噪。汽車表面上的灰塵、污跡會(huì)降低圖像質(zhì)量,預(yù)處理算法選用均值濾波法平滑圖像。均值濾波法是將目標(biāo)像素及其鄰域像素取平均值。在新圖中,對(duì)應(yīng)位置的灰度為所求得的平均值,即:

(2)
其中:為中心在(,)處,大小為×的矩形窗口。
圖2所示為對(duì)采集的汽車圖像中部分原圖像進(jìn)行預(yù)處理后的結(jié)果。

圖2 部分汽車原圖預(yù)處理后圖像
1.2 多尺度底帽變換
由于汽車油箱蓋與覆蓋件之間的板縫的灰度較周圍的低,為增強(qiáng)板縫與覆蓋件之間對(duì)比度以及去除圖像中的噪聲,選用底帽變換(Balck Top-Hat,BTH)對(duì)圖像進(jìn)行處理。這樣可提取具有最小灰度的板縫信息,同時(shí)可以消除光照不均和解決覆蓋件存在高反光區(qū)域的問(wèn)題。
基于灰度圖像的數(shù)學(xué)形態(tài)學(xué)方法是二值圖像形態(tài)學(xué)的擴(kuò)展,將二值圖像形態(tài)學(xué)中的交、并運(yùn)算擴(kuò)展為灰度形態(tài)學(xué)中的最大、最小值運(yùn)算。底帽變換是灰度圖與灰度腐蝕、膨脹相結(jié)合的一種復(fù)合運(yùn)算。基本算子如式(3)—式(6)所示。
設(shè)為輸入圖像,為結(jié)構(gòu)元素,和分別為和的定義域,則:
灰度膨脹為

(3)
灰度腐蝕為

(4)
灰度開(kāi)運(yùn)算為
°(,)=(?)⊕
(5)
灰度閉運(yùn)算為
·(,)=(⊕)?
(6)
開(kāi)運(yùn)算是先用結(jié)構(gòu)元素對(duì)原始圖像進(jìn)行灰度級(jí)腐蝕操作,再進(jìn)行膨脹,可以用來(lái)去除灰度圖中比結(jié)構(gòu)元素小的灰度較高的區(qū)域。閉運(yùn)算是先進(jìn)行膨脹后進(jìn)行腐蝕操作,可以用來(lái)去除灰度圖中暗細(xì)節(jié)部分。
用閉運(yùn)算結(jié)果減去原圖像,這種操作稱為底帽變換,可以提取小于結(jié)構(gòu)元素的暗細(xì)節(jié)特征并去除光照不均勻的影響,定義為
(,)=·(,)-(,)
(7)
灰度級(jí)底帽變換可以提取圖像的暗細(xì)節(jié)特征,采用不同尺度的結(jié)構(gòu)元素進(jìn)行底帽變換可以得到不同尺度下的暗細(xì)節(jié)特征,有選擇地放大需要的特征就可以實(shí)現(xiàn)增強(qiáng)局部對(duì)比度。因此,數(shù)學(xué)形態(tài)學(xué)的重點(diǎn)是結(jié)構(gòu)元素的選擇。底帽變換的結(jié)構(gòu)元素是提取板縫信息的決定性因素,結(jié)構(gòu)元素過(guò)大會(huì)加入較多的噪聲,過(guò)小會(huì)漏掉有用的信息。因此,采用多結(jié)構(gòu)元素自適應(yīng)提取圖像不同尺度下的暗細(xì)節(jié)特征。多尺度結(jié)構(gòu)元素定義如下:
=⊕…⊕…
(8)
其中:為初始選擇的結(jié)構(gòu)元素;為尺度參數(shù),即大尺度結(jié)構(gòu)元素由初始結(jié)構(gòu)元素膨脹-1次得到。因此,第個(gè)尺度下由底帽變換提取的圖像暗區(qū)域BTH, 定義為
BTH,(,)=·-
(9)


(10)
(11)
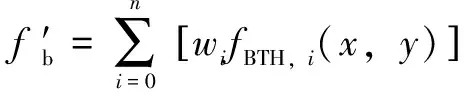
圖3所示為多尺度底帽變換提取暗細(xì)節(jié)特征,為方便顯示,將圖像取反。可以看出,經(jīng)過(guò)多尺度底帽變換后的汽車圖像,油箱蓋的板縫信息在局部區(qū)域更加突出,并且可以減少光照不均、高反光區(qū)域和表面不潔凈的影響。

圖3 多尺度底帽變換
1.3 改進(jìn)最大熵閾值分割
最大閾值分割法是將圖像劃分成目標(biāo)區(qū)域和背景區(qū)域,使目標(biāo)熵和背景熵的和取得最大值時(shí)的閾值為最優(yōu)閾值。方法如下:


(12)

(13)
背景區(qū)域和目標(biāo)區(qū)域的熵分別表示為

(14)

(15)
最大熵閾值分割法是通過(guò)最大化目標(biāo)熵和背景熵的和來(lái)確定閾值,最佳閾值計(jì)算公式為

(16)
通常,經(jīng)過(guò)底帽變換的汽車圖片直方圖接近單峰分布,主要都是背景區(qū)域,其像素值分布在較低的區(qū)域,而候選目標(biāo)區(qū)域占有少數(shù)比例,所以閾值應(yīng)該使目標(biāo)比例1-()盡量小,相當(dāng)于使·()盡量大。因此,最佳閾值可以通過(guò)最大化目標(biāo)熵()和·()的和來(lái)確定。最佳閾值計(jì)算公式為

(17)
式(17)中的用來(lái)控制()的作用程度。用得出的閾值對(duì)圖像進(jìn)行分割得出二值化圖像,如圖4所示。
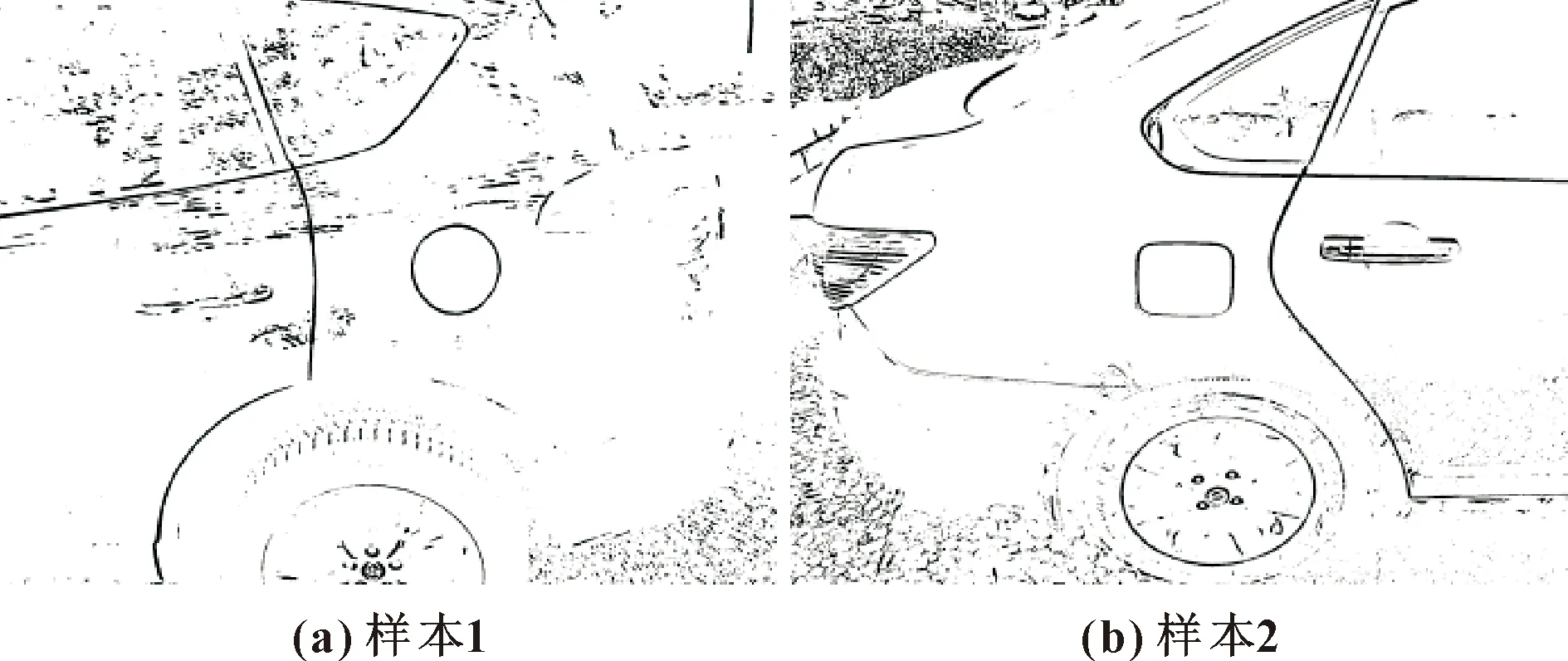
圖4 改進(jìn)最大熵閾值二值化
1.4 目標(biāo)候選區(qū)域提取
閾值分割后的汽車圖像由板縫像素點(diǎn)、干擾噪聲像素點(diǎn)、背景像素點(diǎn)組成。根據(jù)油箱蓋板縫的特征信息,采用提取連通區(qū)域方法,先進(jìn)行去噪,后提取連通區(qū)域的外接矩形,通過(guò)計(jì)算外接矩形的長(zhǎng)寬比和面積判斷是否能選為候選區(qū)域。具體算法步驟如下:
(1)用八連通區(qū)域標(biāo)記二值圖像;
(2)統(tǒng)計(jì)各個(gè)連通區(qū)域的面積并設(shè)置閾值,將小于閾值的連通區(qū)域視為噪聲點(diǎn)并去除;
(3)計(jì)算剩余連通區(qū)域的外接矩形的長(zhǎng)寬比,=(、分別為的長(zhǎng)和寬),保留長(zhǎng)寬比0.5<<2的連通區(qū)域;
(4)計(jì)算剩余連通域外接矩形的面積,將面積符合一定范圍的連通域判定為目標(biāo)候選區(qū)域。
目標(biāo)候選框檢測(cè)結(jié)果如圖5所示。

圖5 目標(biāo)候選框檢測(cè)
1.5 HoG特征提取
HoG特征基于圖像梯度或邊緣方向密度分布的統(tǒng)計(jì)來(lái)描述局部目標(biāo)的形狀和外觀。通常將目標(biāo)圖像劃分為等份的細(xì)胞單元格,分別計(jì)算每個(gè)單元格的方向梯度直方圖,將這些直方圖串聯(lián)起來(lái)組成目標(biāo)區(qū)域的HoG特征描述子。
根據(jù)油箱蓋外形特點(diǎn),對(duì)油箱蓋進(jìn)行特征建模,采用最大值灰度圖的HoG特征。將HoG特征模型特征窗口大小設(shè)計(jì)為128像素×128像素,細(xì)胞單元格設(shè)計(jì)為16像素×16像素,每個(gè)細(xì)胞單元格的直方圖通道設(shè)置為9個(gè)。由于光照不均勻和對(duì)比度的變化會(huì)使梯度強(qiáng)度有較大的變化,需要對(duì)梯度強(qiáng)度做歸一化處理。HoG特征在一個(gè)塊中進(jìn)行梯度強(qiáng)度的歸一化處理,設(shè)計(jì)塊的大小為2像素×2像素,移動(dòng)步長(zhǎng)為16,由此得出的HoG特征維數(shù)為1 764維。
1.6 SVM分類器訓(xùn)練
汽車油箱蓋的檢測(cè)本質(zhì)是一個(gè)二分類模式識(shí)別問(wèn)題,因此可以借助二值分類器進(jìn)行檢測(cè)。SVM具有優(yōu)越的分類性能,在分類樣本量較少的情況下也能獲得較好的分類性能。因此,采用SVM作為汽車油箱蓋檢測(cè)的判決器,提取樣本圖像的HoG特征進(jìn)行訓(xùn)練。
分類器訓(xùn)練時(shí)采用的正樣本為汽車油箱蓋區(qū)域圖像,負(fù)樣本分為兩種:一種是不含油箱蓋的區(qū)域,另一種是與油箱蓋真值框重疊面積占20%~50%的目標(biāo)候選框。用于SVM模型訓(xùn)練的正樣本個(gè)數(shù)為600個(gè),負(fù)樣本個(gè)數(shù)為1 000個(gè)。為提高樣本多樣性以提高分類器性能,正樣本的圖片質(zhì)量比較豐富,亮度偏低和偏高、反光、污跡和運(yùn)動(dòng)模糊等在樣本中都有所體現(xiàn),部分正樣本如圖6所示。負(fù)樣本的選擇也比較豐富,包括環(huán)境背景、車身、車身與環(huán)境背景相交區(qū)域和與油箱蓋邊緣較為相似的汽車輪轂局部區(qū)域,部分負(fù)樣本如圖7所示。

圖6 正樣本
圖7 負(fù)樣本
2 實(shí)驗(yàn)結(jié)果及分析
原圖像來(lái)源于手機(jī)的實(shí)拍圖片,采集不同拍攝角度、不同拍攝距離、不同拍攝背景、不同顏色的500幅大小為1 920像素×1 440像素的汽車圖像進(jìn)行分析,每幅汽車圖像均僅有一個(gè)油箱蓋。其中,兩個(gè)實(shí)例的檢測(cè)結(jié)果如圖8所示。在汽車油箱蓋目標(biāo)檢測(cè)實(shí)驗(yàn)中規(guī)定,如果目標(biāo)檢測(cè)框與真值框之間的IoU值大于0.7,則認(rèn)為該目標(biāo)檢測(cè)是一個(gè)有效檢測(cè)。定義有效率為有效檢測(cè)數(shù)與圖像總數(shù)之比。首先,分析改進(jìn)的最大熵閾值算法采用不同的常數(shù)時(shí)對(duì)檢測(cè)效果的影響,并對(duì)比不同閾值分割算法的效果;再分析多尺度底帽變換的處理效果,并與單尺度底帽變換對(duì)比;最后,從檢測(cè)精度、查全率和查準(zhǔn)率方面對(duì)文中方法的檢測(cè)性能進(jìn)行分析。

圖8 文中算法檢測(cè)效果
2.1 改進(jìn)最大熵閾值分割效果分析
式(17)中常數(shù)是控制變量,不同的取值得到的閾值不同,對(duì)圖像的分割效果也不一樣。為選擇合適的值,取不同的值進(jìn)行測(cè)試,分析有效率,得出當(dāng)=0.8時(shí)可取得較好的效果。
分別采用最大熵、目標(biāo)最大熵、Otsu閾值與改進(jìn)的最大熵4種閾值分割算法進(jìn)行實(shí)驗(yàn),對(duì)汽車油箱蓋檢測(cè)的性能影響進(jìn)行對(duì)比,結(jié)果如表1所示。改進(jìn)的最大熵閾值算法得出的有效率比其他3種算法高,閾值比其他方法低,可使分割后的圖像中油箱蓋板縫盡量不出現(xiàn)斷裂。

表1 不同閾值方法的檢測(cè)結(jié)果
2.2 底帽變換效果分析
底帽變換法對(duì)汽車圖像暗細(xì)節(jié)特征提取的效果主要依賴于結(jié)構(gòu)元的尺度大小,提取效果直接影響油箱蓋檢測(cè)的有效率。采用大小為5像素×5像素的圓形結(jié)構(gòu)元素為初始元素,并對(duì)多種單一尺度下的結(jié)構(gòu)元素進(jìn)行測(cè)試,結(jié)果如表2所示。可以得出:采用多尺度的底帽變換的檢測(cè)效果最好。

表2 不同尺度結(jié)構(gòu)元素底帽變換的檢測(cè)效果
2.3 汽車油箱蓋檢測(cè)結(jié)果分析
對(duì)文中方法從檢測(cè)精度、查全率和查準(zhǔn)率進(jìn)行分析。其中,各個(gè)指標(biāo)評(píng)價(jià)標(biāo)準(zhǔn)如下:


其中:為正確檢測(cè)到油箱蓋數(shù)量;為誤檢的油箱蓋數(shù)量;為漏檢數(shù);為剔除的非目標(biāo)區(qū)域個(gè)數(shù)。
對(duì)500幅汽車圖像進(jìn)行實(shí)驗(yàn),正確檢測(cè)出的油箱蓋數(shù)量為430,誤檢數(shù)為33,漏檢數(shù)為14,剔除的非目標(biāo)區(qū)域數(shù)量為766,則得出查全率為96.85%,查準(zhǔn)率為92.87%,檢測(cè)精度為96.22%。總體來(lái)說(shuō),文中采用的汽車油箱蓋視覺(jué)檢測(cè)算法具有良好的檢測(cè)效果。
3 結(jié)論
本文作者提出了一種非結(jié)構(gòu)環(huán)境下基于HoG與SVM的汽車油箱蓋視覺(jué)檢測(cè)方法。首先,對(duì)待檢測(cè)圖片進(jìn)行灰度化并進(jìn)行平均值濾波操作,再采用多尺度底帽變換提取暗細(xì)節(jié)特征,該方法可以消除光照不均和高反光區(qū)域的影響;對(duì)底帽變換后的圖像采用改進(jìn)的最大熵閾值算法進(jìn)行二值化,再通過(guò)連通區(qū)域方法進(jìn)行去噪并提取外接矩形,根據(jù)外接矩形的面積和長(zhǎng)寬比進(jìn)行篩選,得出目標(biāo)候選區(qū)域;然后,采用基于HoG特征的SVM分類器對(duì)候選區(qū)域進(jìn)行精確檢測(cè)。對(duì)500幅汽車圖像進(jìn)行了實(shí)驗(yàn),結(jié)果表明:該方法可以準(zhǔn)確地檢測(cè)油箱蓋目標(biāo),并且有較高的檢測(cè)率,誤報(bào)較少,可以有效地解決光照不均、存在高反光區(qū)域和表面不潔凈等問(wèn)題。
由于實(shí)際環(huán)境非常復(fù)雜,在一些情況下仍存在漏檢和誤檢現(xiàn)象,尤其在低照度、運(yùn)動(dòng)模糊、嚴(yán)重的投影透視變換和存在涂鴉圖案的場(chǎng)景下較為明顯。后續(xù)研究工作中,可以加入更加完備的樣本數(shù)據(jù)并優(yōu)化分類器的性能,加入更加有效的圖像處理算法,以提高油箱蓋檢測(cè)的有效率。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
兒童時(shí)代·快樂(lè)苗苗(2017年7期)2018-01-24 18:28:45
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52
決策探索(2014年21期)2014-11-25 12:29:50
