步行移動機器人專利概況分析
2022-09-20 07:58:20楊慧慧
科技創新與應用 2022年26期
關鍵詞:移動機器人
楊慧慧
(國家知識產權局專利局專利審查協作北京中心,北京 100160)
機器人技術是近幾十年發展起來的綜合學科,它集中了機械工程、電子工程、計算機工程、自動控制工程及人工智能等多種學科的科研成果。輪式、履帶式及腿式是人類設計用于移動式機械裝備主要的基本形式,在實際應用中,為適應星球探測、軍事及救災等極為復雜的地面環境,腿式及蛇形等移動機構的研究一直為學術界和大眾所關注[1]。
1 全球步行移動機器人專利研究現狀
步行移動機器人在機動性能上的獨特優勢使得其在軍事、航空航天中應用愈來愈廣,這也將使其成為未來無人環境中的主體和先導,據調查地球上近一半的地面不能為傳統的輪式、履帶式車輛到達,而很多足式的動物卻可以在這些地面上自如行走[2]。步行移動機器人的研究一直是眾多學者關注的熱點和難點,步行移動機器人的基礎理論研究步伐要遠滯后于其技術開發步伐,現有的步行移動機器人的足數為偶數的占大多數,因為就直線運動來說,偶數足能產生有效的步態[3],國內步行機器人的發展最早可追溯到中國古代,此后步行移動機器人歷經了長久的發展。
圖1為根據每年全球步行移動機器人領域的專利申請量,繪制出的步行移動機器人在全球各年度專利申請的趨勢圖,在步行移動機器人領域的全球專利申請大體經歷了以下幾個發展階段。
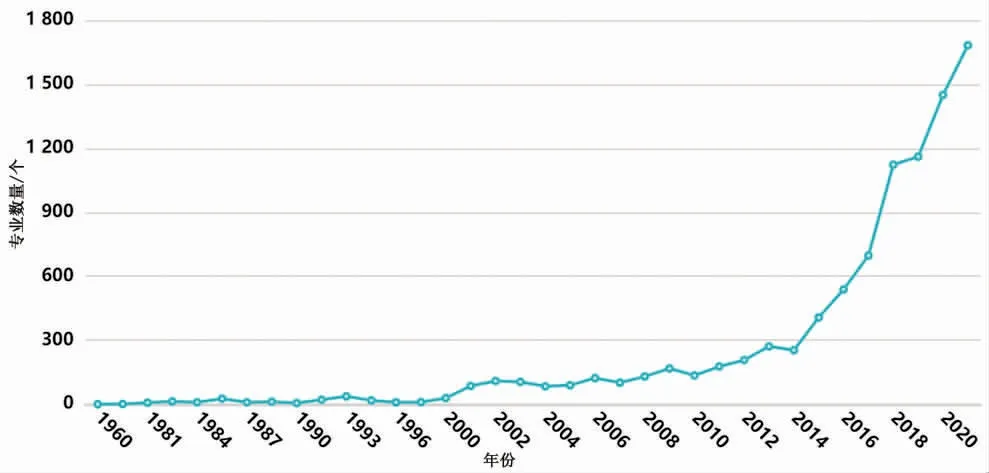
圖1 全球步行移動機器人相關專利的全球申請趨勢
1.1 初步發展階段(2000年之前)
從圖中可以看出早在20世紀60年代初,世界各國陸續開展了步行機器人技術的研究,美國的2位學家就使用凸輪連桿機構設計出比傳統車輛更為靈活的步行移動機構,但在很長一段時間內步行移動機器人技術的相關專利較少,始終處于個位數,之后申請量稍有增長,但也沒有很快速地增加,這是由于在步行機器人發展的初期,還是以簡單的機械、液壓控制及簡單的步態,模仿簡單的足式動物行走為主,還不能應用到復雜的領域環境中。
1.2 第一快速發展階段(2000—2014年)
隨著科學技術的發展,各界對步行移動機器人的研究開始深入,此階段發展位以計算機控制為主,以美國、日本等國的發展最為突出。比如日本工程師Takahashi Hitoshi、日本教授Hirose Shigeo此期間申請了多項發明專利,如:JPH03111182A、JPH07117743A、JPS62277282A、JPS60245869A,可作為移動的平臺在崎嶇和陡峭的地方步行,能夠實現避障的功能,同時步行腿也能作為操縱器使用,能夠自主超過一定角度的斜坡。機器人的腿部機構均是采用四桿機構的縮放步行機構,采用開環連桿機構作為其步行機構,其腿可作為有力的工作臂,可用于探測地雷和進行排雷操作,適用于軍事方面。美國的Boston Dynamic Inc.從2004至今申請了多件專利,以著名的“Bigdog”聞名,這是一種動力平衡四足機器人,它沒有車輪或者履帶,采用4條機械腿來運動,機械腿上面有各種傳感器,包括關節位置和接觸地面的部位,其運動是由裝載在機身上的計算機控制,計算機能夠接收機器上各種傳感器傳達的信號,導航和平衡也由這個控制系統控制。
1.3 第二快速發展階段(2015—2021年)
隨著科學技術的繼續發展,此階段發展位以人工智能控制技術為主,步行移動機器人的專利申請量迅速增加,此階段的機器人不但具備完成各種任務的功能,還有自適應的運動規劃和控制性能,日本、美國等各國發明出多種仿生步行機器人,將仿生動物應用于機器人的運動學設計來提高機動性和可操作性,如日本申請人Univ Osaka申請的WO2006129857A1,形體像蜘蛛,將3個集成肢體的肢體尖端部分鉤到安裝在天花板上的格子上,以使機器人沿著天花板行走。美國申請的US4527650A,可以在非常狹窄的區域中行走和操縱,在不旋轉身體的情況下改變其運動方向,協調各個腿部的運動,感覺到周圍的環境,以便每只腳都能正確落地,保持平衡,以免摔倒,韓國申請人Univ Sungkyunkwan申請的KR20070070825A,模仿活生物體的仿生動物應用于機器人的運動學設計來提高機動性和可操作性,通過分析四足動物在步行過程中前肢和后肢的特殊功能和步態,可以將其用作提高能量效率和步態的重要設計因素。
2 在中國申請的步行移動機器人專利申請概況
2.1 中國的申請人申請趨勢
圖2為根據每年中國步行移動機器人的專利申請量,繪制出的步行移動機器人在中國各年度專利申請的趨勢圖。在國內對多足步行機器人的研究是在20世紀80年代末90年代初起步的,初期申請量很少,2000—2020年,步行機器人技術也有了較大的發展,申請量迅速增加。
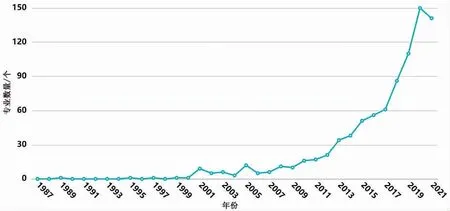
圖2 步行移動機器人相關專利的中國申請趨勢
2.2 中國申請人的類型分布
圖3為中國國內專利申請人類型的分布,通過該分析可以明晰創新主體的類型,并通過創新實體的主體性質、研發實力和研發目的分析創新成果更偏向基礎研究還是商業應用,定位技術在產業鏈中的位置和可能的運營模式,為進一步找出在產業內影響力大的不同類型的創新主體提供依據。觀察圖3可知,步行移動機器人領域專利申請人的主體是大專院校,大專院校申請人的申請量占比為48.77%,高于其他類型的申請人的申請量,其次是企業申請人,企業申請人的申請量占比為36.61%,這不僅與步行移動機器人領域技術含量較高、結構復雜等因素有關,還與該領域的技術成果多用于軍事、航空等探索研究及投放市場的研發目的有很大關系。

圖3 步行移動機器人中國專利申請人類型
2.3 中國主要申請人排名
圖4中為申請步行移動機器人中國專利大專院校的排名前十的主要申請人,國內211、985大專院校是中國申請人進行步行移動機器人研發和申請的絕對主力,浙江大學、清華大學、北京航空航天大學、上海交通大學和北京交通大學等院校都先后開展了多足步行移動機器人技術的研究。

圖4 在中國申請步行移動機器人的主要申請人
其中比較有代表性的有上海交通大學申請的2種四足仿生機器人,腿部采用四桿縮放機構,清華大學、上海交通大學也相繼申請了多件有關四足仿生機器人的專利,具有爬坡、越障等環境適應性功能,可以在地形復雜、環境惡劣的作業條件下行走,如:清華大學申請的CN1483554A(一種可調整的四足仿生機器人運動結構),通過調整多項結構參數與運動參數,使機器人呈現多種仿生形體結構,該機器人可用來實現以多種典型步態如自由行走、對角行走、側步和奔跑等進行平地行走,能夠適用于模仿較廣泛的動物節律運動控制,可用來進行野外勘探、探險等一些惡劣條件下的作業;上海交通大學申請的CN104925160A(直線驅動的步行機器人腿部構型及并聯六足步行機器人),具有腿部質量輕、轉動慣量小、便于防護和驅動器規格統一的優點,可以在地形復雜、環境惡劣的作業條件下行走。
但是,目前研究和應用的步行移動機構的腿部一般采用連桿機構,從整體上看都屬于開鏈機構,且腿部自由度多,結構復雜需要較多的動力機驅動與控制,腿式協調控制復雜。北京交通大學姚燕安教授在2008年至今申請20多項發明專利,發明了多種將空間閉鏈機構應用到步行機構中的設計,這些機構在航天、軍事等領域的偵查和采樣等方面均可以得到應用,如:CN108860353A(一種全轉動副四面體移動機器人),其6個支鏈的結構和尺寸相同形成閉環,外形呈現正四面體,通過控制舵機的正、反轉驅動支鏈內翻、外翻達到四面體移動機器人的變形及移動目的;CN101915292A(一種單動力滾動球面四桿機構),通過控制電機正反轉,使得球面四桿機構變形,利用慣性力使機構翻轉,實現機構沿著圓周滾動;CN102058982A(一種單動力滾動多邊形機構),該機構具有單自由度用1個電機進行驅動和控制,同時具有“雪花”的外形特征,通過變形改變機構的重心位置,實現滾動運動。CN102211623A(一種空間四桿步行機構),通過控制2個電機的轉動,使空間四桿步行機構實現直行及轉彎功能,實現平面任意方向步行運動;CN102874340A(一種具有操作功能的移動機構),通過控制驅動電機,實現該機構步行和爬行步態,可以達到調節自身平衡與越障的功能。
3 結束語
隨著科學技術的發展,人類的研究和活動領域已在不斷地擴展,利用步行移動機器人進行探測和開發己經成為21世紀世界各主要科技發達國家的主要方式之一,從專利申請來看,中國也正在加大對步行移動機器人領域的研究。在未知的環境、不可以預測的環境中步行移動機器人的研究將是機器人學的一個重要研究領域。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
機電產品開發與創新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19
