基于知識圖譜的旋轉機械故障診斷方法*
2022-09-22 07:38:14盛林,馬波,2*,張楊
機電工程 2022年9期
盛 林,馬 波,2*,張 楊
(1.北京化工大學 機電工程學院,北京 100029;2.北京化工大學 高端機械裝備健康監控與自愈化北京市重點實驗室,北京 100029)
0 引 言
目前,旋轉機械在現代工業生產領域已得到了廣泛的應用。旋轉機械一旦發生故障,將會造成很大的經濟損失與社會危害[1]。
為了提高旋轉機械的可靠性,對旋轉機械進行故障智能診斷研究具有重要的工程意義。
目前,傳統故障診斷方法一般可以分為3大類:(1)基于解析模型的故障診斷方法;(2)基于數據驅動的故障診斷方法;(3)基于知識的故障診斷方法[2]。
基于解析模型的故障診斷方法一般采用數學公式,將真實過程抽象成精確解析模型,通過計算模型輸出值與實際測量值的殘差來進行診斷。
劉志剛等人[3]采用了候選最小沖突集,成功將基于模型的診斷方法應用到了牽引變電站的電氣設備的故障診斷中。張永強等人[4]基于ARX模型,提出了一種通過模型匹配的轉子故障診斷方法。楊誠等人[5]提出了一種新的Volterra-PARAFAC預測模型,用于對滾動軸承故障進行診斷,解決了該模型用于復雜機械系統非線性特征提取時估計參數過多的問題。
但是,該診斷方法依賴于對故障過程機理的深入了解,一旦解析模型與實際情況不符,則會造成較大的診斷偏差,對于機理復雜、工況多變的旋轉機械設備適用性差。
基于數據驅動的故障診斷方法針對設備監測數據進行多方面的數據分析、處理,提取設備的故障特征,對故障進行診斷。該方法是否成功運用的關鍵在于對故障特征的提取是否準確。
蘇乃權等人[6]提出了一種基于高價值小樣本的故障診斷NN模型進行故障診斷的方法,其具有特征提取準確、故障識別能力強的特點,有效地解決了旋轉機械故障類型識別難的問題。廖玉波等人[7]采用了基于Fisher Score與域間最大均值差異的特征選取方法,選取了判別性能和域不變性好的特征,構建了遷移深度置信網絡;采用該方法后,明顯提高了旋轉機械故障診斷的準確率。馬波等人[8]提出了一種基于專家思維的多維度故障診斷方法,依據故障機理、故障響應特點及故障劣化規律,選擇相關測點、多時間點的數據,構建了敏感參數矩陣,并生成了對應的故障矩陣和權重矩陣,進行了故障的診斷。WANG Qing-feng等人[9]提出了一種多敏感特征的滾動軸承故障診斷模型構建方法,利用了美國凱斯西儲大學(CWRU)故障數據訓練故障診斷模型,該方法具備較高的故障診斷精度。
上述基于數據驅動的故障診斷方法不依賴于精確的機理模型,同時將計算機強大的計算能力與故障診斷結合在一起,對設備故障診斷具有一定的普適性。但是,采用該類方法得到的診斷結果由于缺少故障知識和過程知識的支撐,其解釋性受到一定的限制[10]。
基于知識的故障診斷方法具有良好的可解釋性,不需要構建復雜的數學機理模型,同時還可以更新故障知識。因其具有一系列的優點,該診斷方法引起了業界科研人員的廣泛關注。
張強等人[11]提出了一種基于置信度的不確定性推理方法,對汽輪發電機組故障進行了規則推理,在診斷結果不確定或無結果時,采用案例推理機制進行了推理,有效地提高了汽輪發電機組的診斷效率。尚文等人[12]采用了條件規則和故障樹法相結合的診斷方法,增加了具體故障分析的條件規則,確定故障樹每個分支的診斷選擇,實現了對燃氣輪機的快速、準確的診斷維護。YAN Chang-feng等人[13]4448建立了一種基于規則推理和案例推理的汽輪發電機組故障診斷系統,以基于規則的推理為案例推理提供支持,提高了故障診斷的效率。WAN Shan等人[14]提出了一種基于案例推理的機床維護規劃系統,提高了機床維護計劃的效率。
基于知識的故障診斷方法雖然無需針對旋轉機械建立復雜的機理模型,且其結果的可解釋性強,但是該方法仍缺乏對旋轉機械故障診斷知識及其耦合知識聯系進行進一步挖掘利用,且對診斷輸入的準確性要求很高[15]1378,在輸入征兆條件缺失的情況下,其診斷結果也會出現較大的偏差。
知識圖譜概念的提出,最初是為搜索引擎服務的。隨著人工智能技術的發展,知識圖譜技術已在醫療領域[16]、電商領域[17]、領域知識管理[18]等方面得到了應用。許多學者針對基于知識圖譜技術的智能故障診斷方法進行了研究。
許祺[19]采用深度學習技術,完成了對CNC故障診斷領域知識實體識別任務,建立了CNC故障診斷知識圖譜,并結合知識圖譜搜索算法,實現了故障診斷。趙倩[20]采用數據驅動的增量式本體構建技術,建立了數控設備的故障本體模型,構建出了數控設備故障領域知識圖譜,提高了歷史故障知識利用率和故障診斷效率。車金立等人[21]利用裝備維修保障內部數據源進行了關鍵信息抽取,建立了裝備維修保障的知識圖譜,并通過對裝備維修保障知識圖譜的應用,證明了知識圖譜能支撐維修保障、輔助決策多種應用。
上述研究結果表明:將知識圖譜技術運用到故障診斷領域,能夠準確、全面地對故障診斷知識及其聯系進行描述,同時還能為故障診斷推理提供新的解決思路。
筆者采用基于本體的表示方法,對旋轉機械故障診斷知識進行知識表示,建立旋轉機械故障診斷知識圖譜,并結合知識圖譜推理方法,提出旋轉機械的故障診斷方法,以有效地解決故障征兆缺失時診斷結果準確率低的問題。
1 理論背景
1.1 知識圖譜
知識圖譜本質上可以理解為一種揭示實體之間關系的語義網絡,由形如“實體-關系-實體”三元組結構的數據進行相互連接組成[22]。實體是知識圖譜中最基本的元素,通過兩兩間的關系進行連接,進而形成結構化的知識網絡。
由三元組作為基本組成結構的知識圖譜示意圖,如圖1所示。
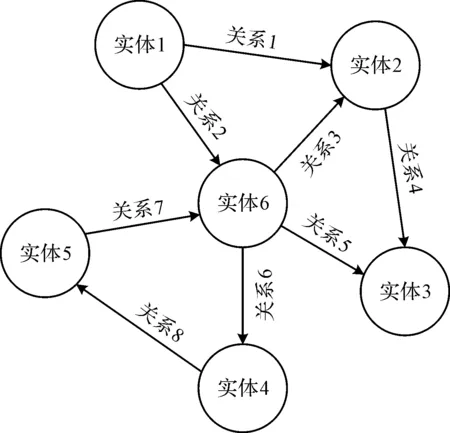
圖1 知識圖譜示意圖
1.2 基于本體的知識表示方法
基于本體的知識表示方法在計算機人工智能領域中,能夠精確定義、表示某一領域的概念、概念屬性、概念間關系以及關系屬性,揭示概念之間的內在關系,使知識管理與共享更簡便、靈活[23],這些本體定義描述能夠被計算機理解,同時也能被領域所接受。
根據NAING MM博士提出的六元素表示法[24],可將知識本體(knowledge ontology,KO)定義為:
KO=
(1)
式中:C—不同概念的集合;R—不同關系的集合;AC—概念屬性的集合;AR—關系屬性的集合;I—概念實例的集合。對上述定義作進一步說明:
(1)概念定義與實例定義
概念集合可以進一步表示為:
C={Ci|Ci=C1,C2,…,Cn,i=1,2,…,n}
(2)
式中:n—本體表示模型中類概念的類別數。
概念實例集合I中,每一個實例都是本體概念的實例化表示,即:
I={It|It∈Ci,t=1,2,…,m}
(3)
式中:m—實例集合I中概念實例個數。
(2)關系定義
設Cs,Ct分別是概念集合C中的第s,t個概念,且Cs,Ct都包含于概念集合C中,對于任意的概念元素Ct,存在概念元素Cs(s≠t,且1≤s,t≤n),滿足:
Cs=R(Ct)
(4)
式中:R—概念元素Cs,Ct之間的關系,記作R(Cs,Ct)。
在同一個概念集合中,使用這種映射關系R(Cs,Ct)來表示概念集合中各概念之間的基本關系,如父類與子類的繼承關系。各概念實例間關系繼承式(4)表示的定義,也即實例元素Is,It之間的關系可以記作R(Is,It)。
(3)屬性定義
對本體表示模型中的概念屬性集合作如下定義:AC={title,id}。
其中:id—本體的id屬性,為一數字數值,在知識圖譜中數值唯一;title—本體的名稱屬性,用于表示概念的名稱。
對本體表示模型中的關系屬性集合作如下定義:AR={type,id}。
其中:id—與概念屬性中定義相同;type—關系類別屬性,用于表示關系的名稱。
1.3 基于關系路徑的知識圖譜推理方法
在基于關系路徑的知識圖譜推理中,主要通過實體間的多步路徑來尋找它們之間的語義關系[25]。在知識圖譜中,定義:
R(e)≡{e′:R(e,e′)}
(5)
式中:R—實體間的二元關系;e,e′—知識圖譜中實體對;R(e,e′)—表示實體對e、e′存在關系R。
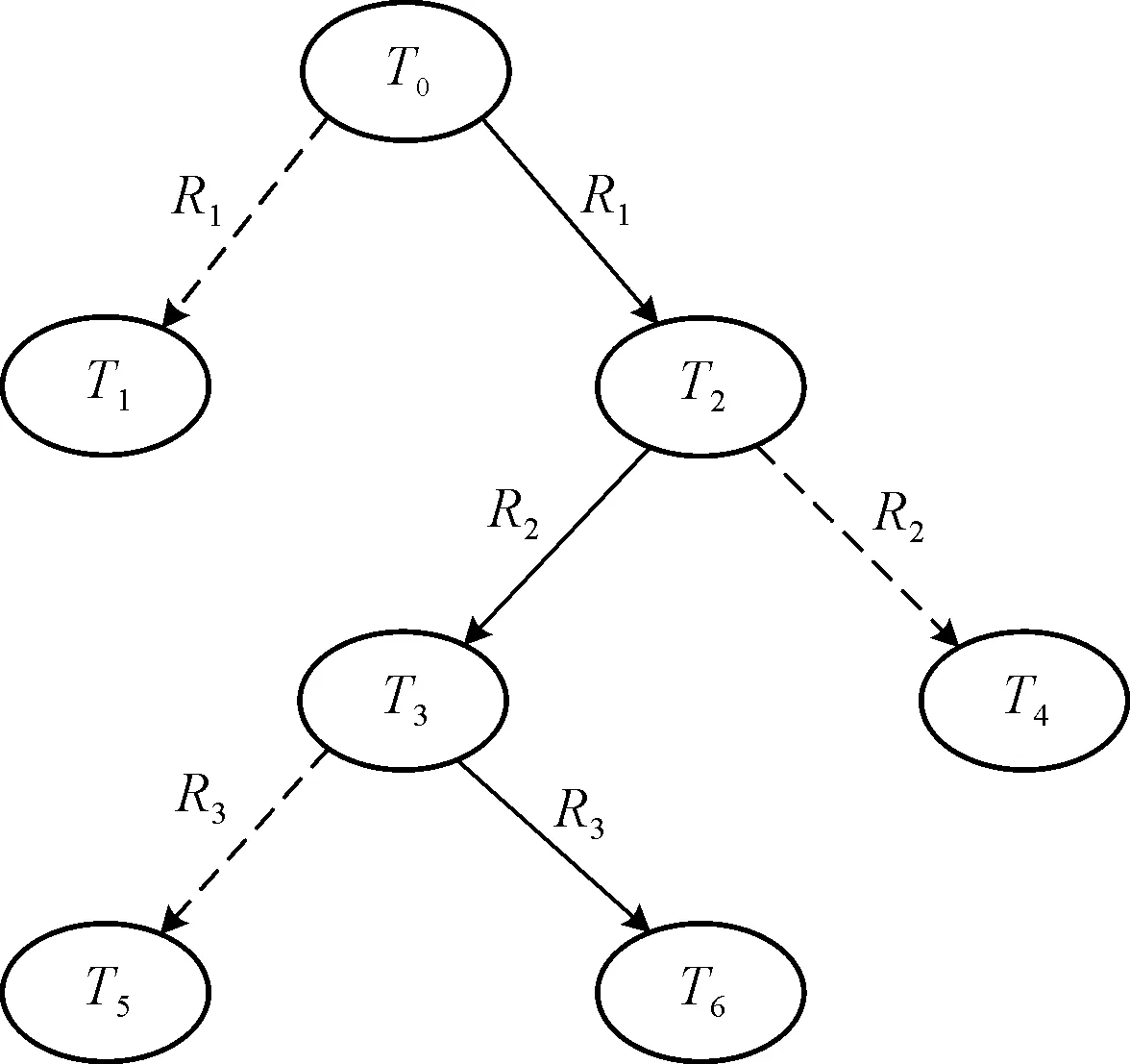
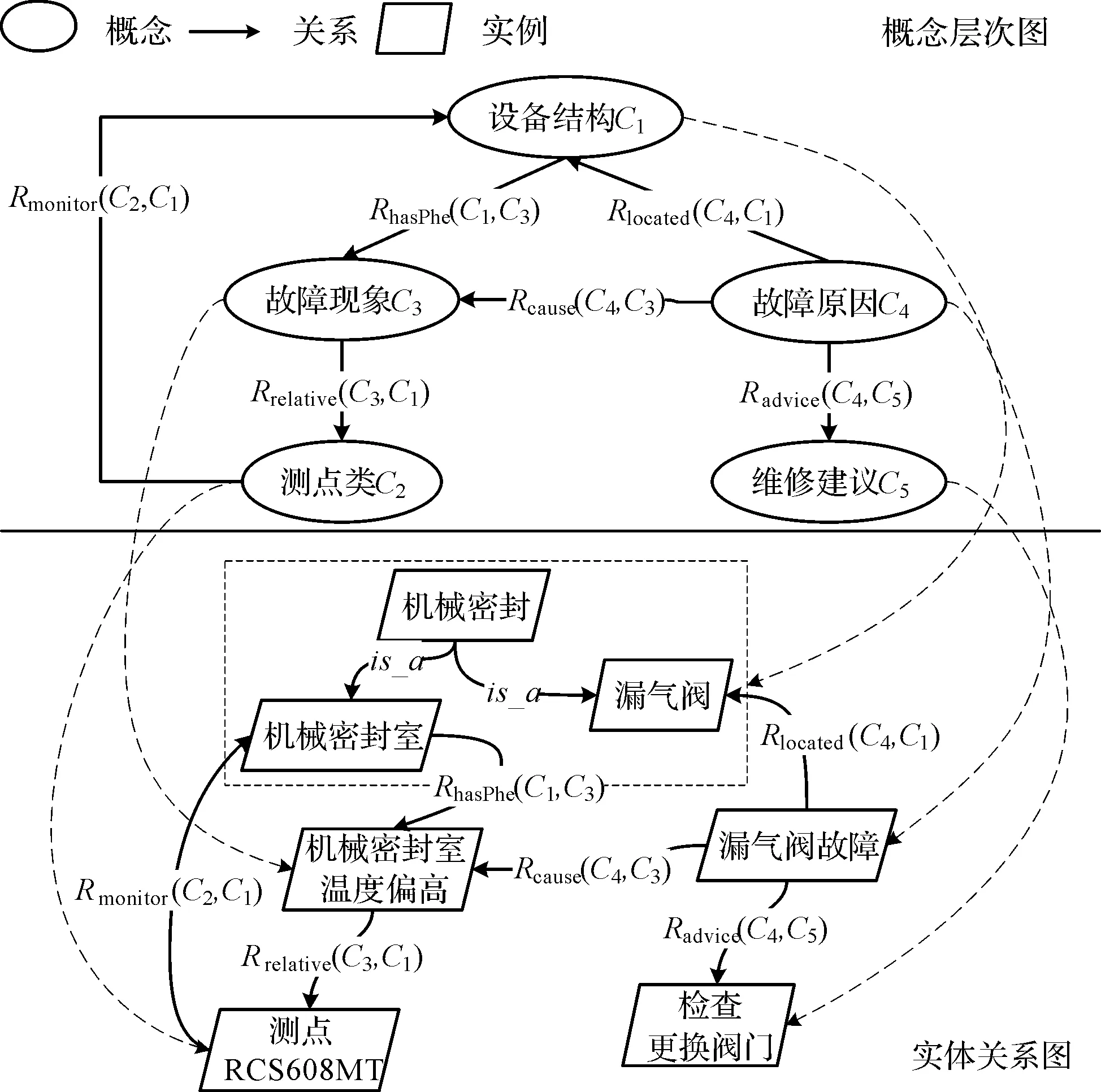
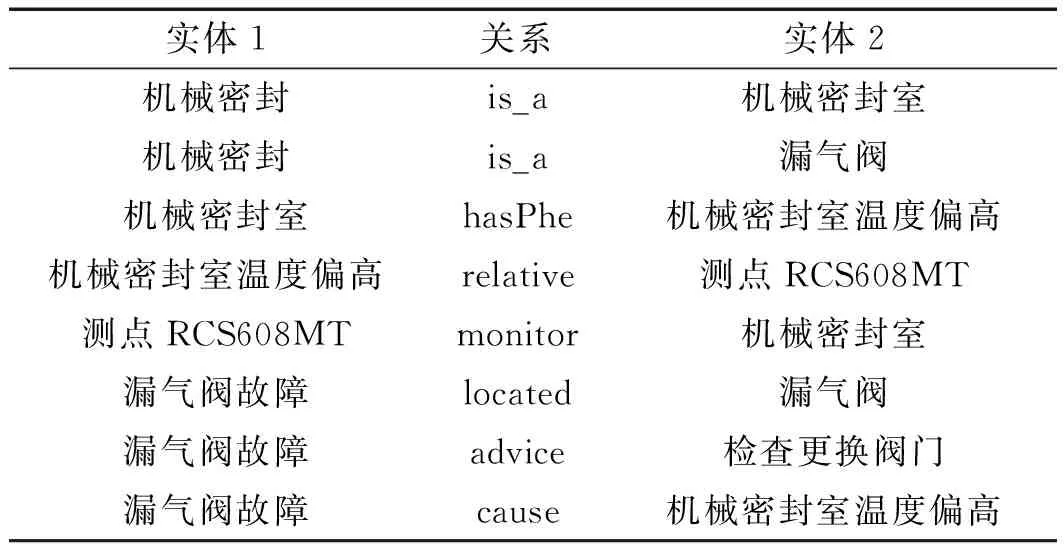
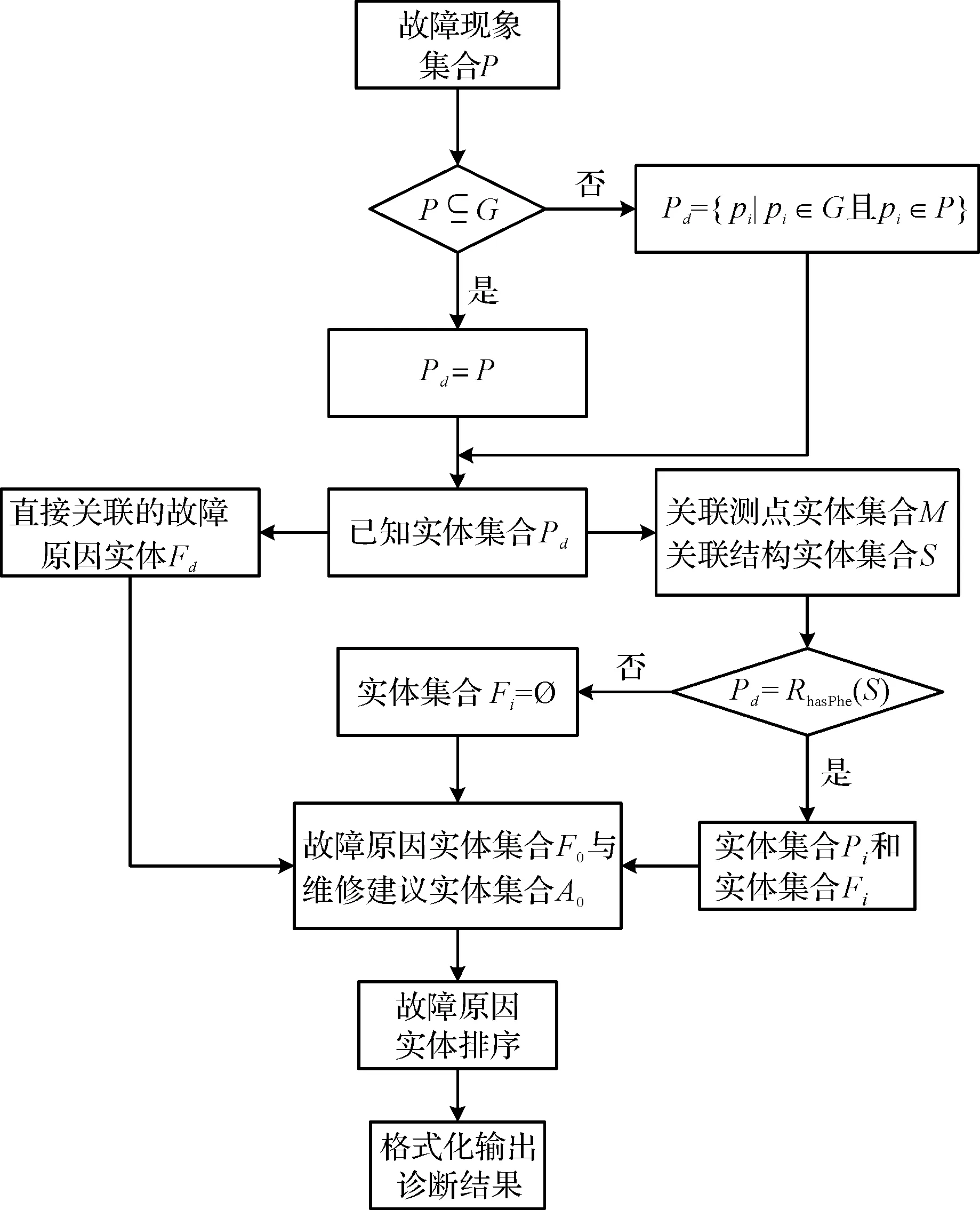
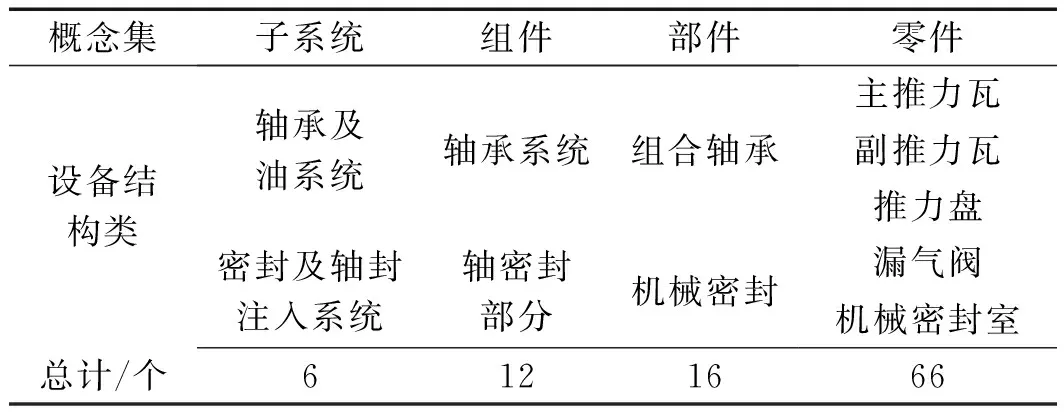
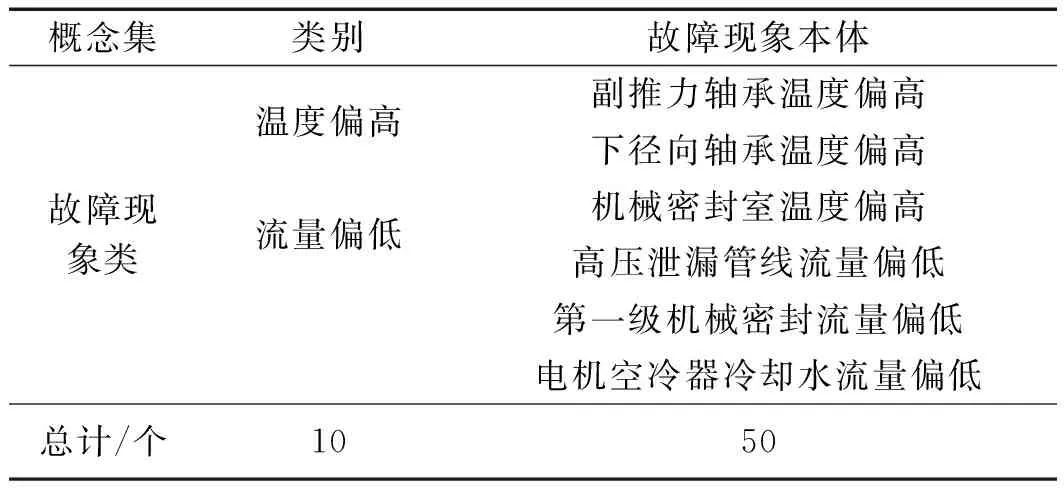
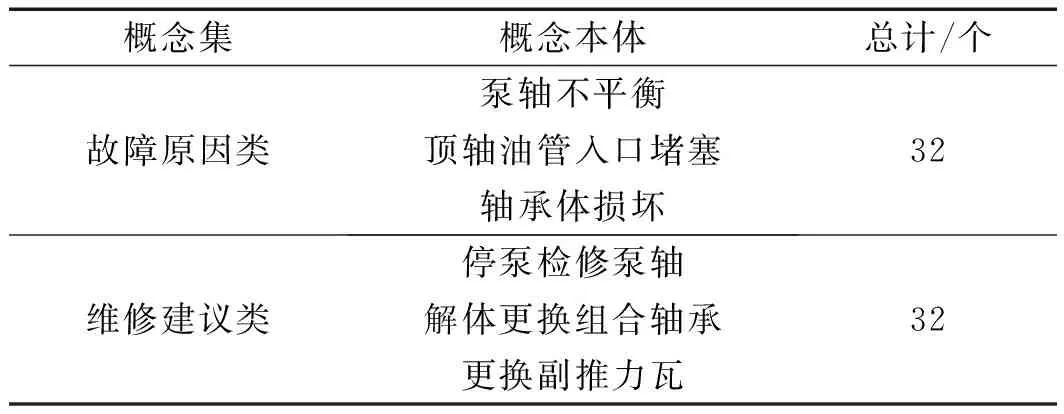
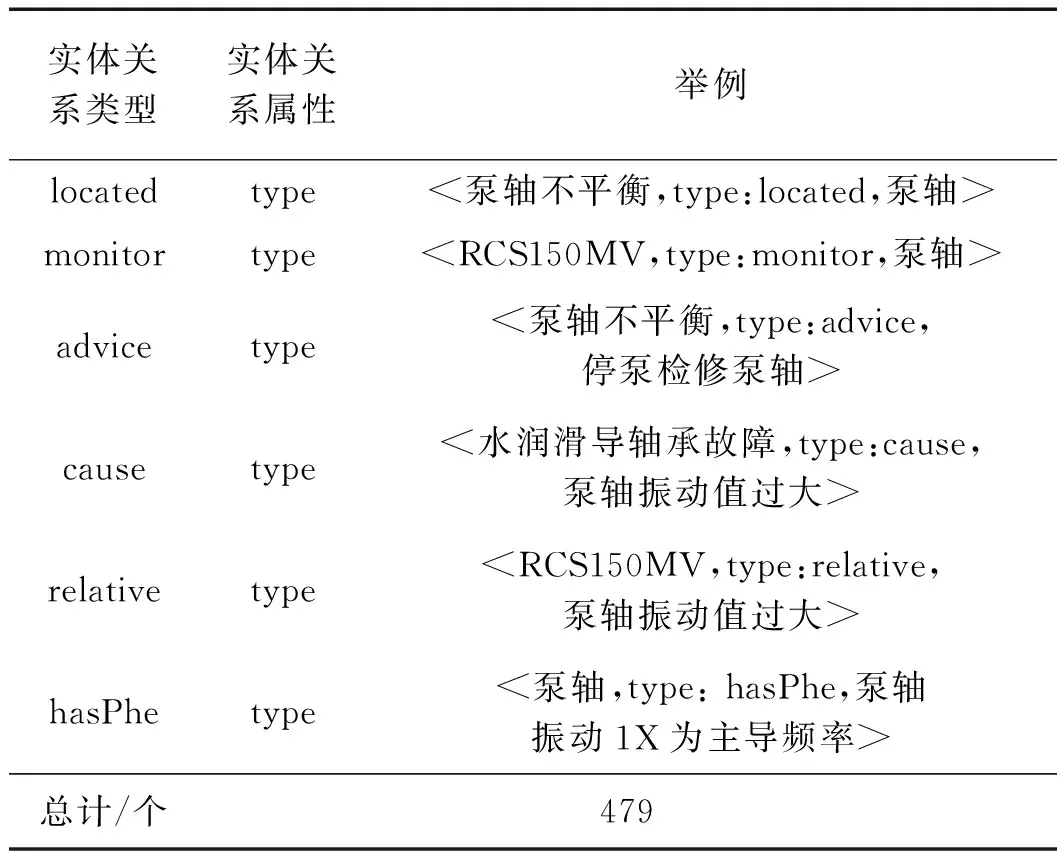
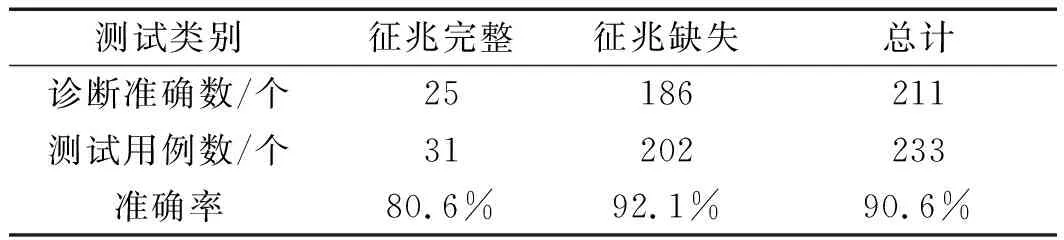
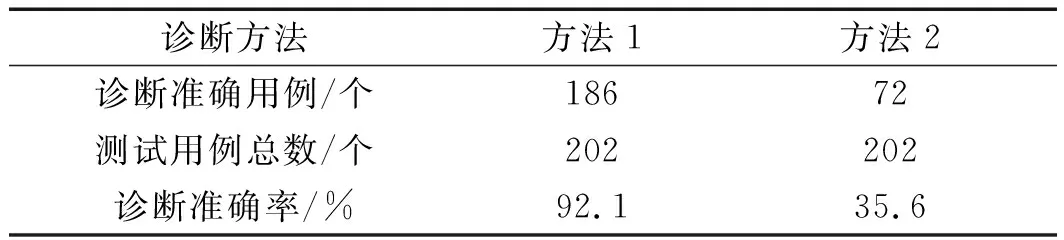
關系路徑P由關系R1,R2,…,Rn組成,且對任意的整數i(1 range(Ri)≡domain(Ri+1) (6) 式中:domain(R)—關系R的定義域;range(R)—關系R的值域。 令: domain(R1R2…Rn)=domain(R1) (7) range(R1R2…Rn)=range(Rn) (8) 著重強調路徑中每個步驟關聯的關系類型時,將路徑P=R1R2…Rn表示為: (9) 式中:T0—可表示為T0=dom(R1)=dom(P);T1—可表示為T1=range(R1)=dom(R2);其余節點Ti以此類推。 多級關系路徑的示意圖如圖2所示。 圖2 多級關系路徑示意圖 圖2中,實體T0和T6間的多級關系路徑可以表示為: (10) 式中:T2—關系R1的值域range(R1);T3—關系R2的值域range(R2);T6—關系R3的值域range(R3)。 采用知識圖譜技術構建旋轉機械的故障診斷領域知識圖譜,能夠對設備故障診斷知識進行全面、準確地表達,同時能有效利用故障診斷知識間的關系,解決輸入征兆缺失時,難以對旋轉機械的故障進行準確診斷的問題。 筆者提出的基于知識圖譜的旋轉機械故障診斷方法包括兩部分:(1)知識圖譜構建;(2)基于知識圖譜進行診斷推理。其具體步驟為:首先采用基于本體的知識表示方法構建知識圖譜;然后利用基于知識圖譜關系路徑的推理方法進行診斷推理。 2.1.1 知識本體表示 采用基于本體的知識表示方法,可將旋轉機械故障診斷領域知識本體(rotating machine fault diagnosis ontology,RMFDO)表示如下: RMFDO= (11) 式中:C—本體概念的集合;R—本體關系的集合:AC—概念的屬性;AR—關系的屬性;I—實體元素的集合。 可將旋轉機械故障診斷知識分為5個不同類別的本體,本體概念集合表示為: C={C1,C2,C3,C4,C5} (12) 式中:C1—設備結構類本體概念;C2—測點類本體概念;C3—故障現象類本體概念;C4—故障原因類本體概念;C5—維修建議類本體概念。 RMFDO本體中不同類別概念間關系構成關系R的集合,可以表示為: R={R1,R2,R3,R4,R5,R6} (13) 式中:R1—設備結構類與故障原因間的關系;R2—測點類與設備結構類之間的關系;R3—維修建議類與故障原因類之間的關系;R4—故障現象類與故障原因類之間的關系;R5—測點類與故障現象類之間的關系;R6—測點類與故障現象類之間的關系。 按照本體表示模型中的定義,上述各關系表示的語義關系如下: (1)R1=Rlocated(C4,C1)表示故障發生在某個設備結構處; (2)R2=Rmonitor(C2,C1)表示測點監測某處設備結構; (3)R3=Radvice(C4,C5)表示針對故障原因需要采取的維修建議; (4)R4=Rcause(C4,C3)表示故障原因造成了某種故障現象出現; (5)R5=Rrelative(C2,C3)表示故障現象的異常指標由該測點進行監測; (6)R6=RhasPhe(C1,C3)某個設備結構處出現了故障現象。 在旋轉機械故障診斷領域知識的本體表示模型中,AC和AR分別定義為概念屬性和關系屬性,直接繼承本體表示模型中的定義。 實例I表示知識實體元素的集合,各實體間的關系繼承概念集合間的關系集合R。 2.1.2 知識表示 旋轉機械故障診斷領域知識圖譜的結構關系可分為2大類:(1)本體概念層次圖;(2)知識實體關系圖。 該處筆者以主泵漏氣閥的故障為例,展示旋轉機械故障診斷領域知識圖譜模式層與數據層之間的相互對應關系。 旋轉機械故障診斷領域知識圖譜,如圖3所示。 圖3 旋轉機械故障診斷領域知識圖譜 筆者將旋轉機械故障診斷知識表示為三元組結構:<實體,關系,實體>,并采用圖數據庫對旋轉機械故障診斷領域知識進行存儲。圖數據庫以節點表示實體,與三元組中實體相對應;以帶方向的邊表示知識間的關系,與三元組中關系相對應。 旋轉機械故障診斷領域知識圖譜實體關系的三元組示例,如表1所示。 表1 實體關系三元組示例 表1中,實體關系的三元組在圖數據庫中存儲后,如圖4所示。 圖4 知識圖譜示例 筆者根據旋轉機械知識圖譜的圖結構特點,結合基于關系路徑的知識圖譜推理方法,提出了基于知識圖譜的旋轉機械故障診斷推理方法。 其診斷推理方法流程圖,如圖5所示。 圖5 基于知識圖譜關系路徑的診斷推理流程 推理方法的詳細步驟如下所述: (1)輸入故障現象的集合P={p1,p2,…,pn},n為正整數; (2)遍歷故障現象集合P,是否滿足P?G(其中G表示圖譜中所有實體的集合),若滿足該條件,則下一步用于推理的已知實體集合為Pd=P;若不滿足上述條件,對集合P進行操作,剔除集合P中不在知識圖譜G中的實體元素后,得到實體集合Pd={pi|pi∈G且pi∈P}; (5)驗證關聯結構實體集合S與故障現象集合Pd是否存在關系路徑RhasPhe(C1,C3),也即關系Pd=range(RhasPhe(C1,C3))是否存在; (7)取故障原因實體集合F0=Fd∪Fi,即F0為直接關聯故障原因集合Fd與間接關聯的故障原因集合Fi的并集,由故障原因實體集合F0根據關系路徑Radvice(C4,C5),引入維修建議實體集合A0,有:A0=range(Radvice(C4,C5)); (8)對故障原因集合F0中的實體進行排序,排序方法如下:首先將直接關聯原因放在間接關聯原因之前;其次將直接關聯原因中的各實體按照與實體集合Pd中的實體有直接關聯路徑的個數由多到少進行排序。排序后即得到故障原因實體集合F1,維修建議實體按照相同順序排序得到實體集合A1; (9)對故障原因實體集合F1與維修建議實體集合A1進行格式化,然后輸出診斷結果。 筆者以核電廠主泵為例,基于上述方法構建主泵故障診斷知識圖譜,對該方法的可行性進行驗證,對其診斷性能進行測試。 3.1.1 主泵故障診斷知識本體 (1)本體概念的建立 設備結構類C1用于描述主泵結構的概念集合。根據主泵自身的結構組成,按照自頂向下的原則,可得到主泵各子系統、組件、部件、零件等層次結構,不同層次結構間使用父子間關系“is_a”表示。 部分設備結構概念本體如表2所示。 表2 設備結構類概念本體 測點類C2用于描述監測主泵運行狀態的各測點概念集合。 按照監測狀態值類別的不同,可將測點分為溫度測點、流量測點、壓力測點等。 測點類概念本體如表3所示。 表3 測點類概念本體 故障現象類C3用于描述主泵發生故障時所表現出來征兆現象的概念集合。 按照征兆特征的不同,可將故障現象類概念進一步分為溫度偏高、流量偏低等不同類別。 故障現象類概念本體如表4所示。 表4 故障現象類概念本體 故障原因類C4用于描述引發主泵故障的可能原因的概念集合。維修建議類C5用于描述針對可能的故障原因而給出的建議的概念集合。 故障原因類概念本體與維修建議類概念本體示例,如表5所示。 表5 故障原因類與維修建議類概念本體示例 (2)本體關系的建立 根據旋轉機械故障診斷知識本體表示,對主泵各本體概念間關系進行表示,如表6所示。 表6 本體概念間關系示例 3.1.2 主泵故障診斷知識表示 筆者根據所建立的主泵故障診斷知識本體,獲取主泵故障診斷知識,并以三元組的形式進行表達(即相同類別的概念實例放在同一個表里,表的每列代表該類實體的屬性值,每行代表該類實體的實例),同時定義好實體的標簽;在此基礎上,再建立三元組關系表,對關系進行標識。 筆者建立主泵故障診斷知識三元組實體表和關系表后,采用圖形數據庫Neo4j對三元組知識進行數據存儲,完成主泵的故障診斷知識圖譜構建。 主泵故障診斷知識圖譜中整合的實體類型,如表7所示。 表7 知識圖譜實體類型及屬性 實體關系類型及相關統計信息,如表8所示。 表8 知識圖譜實體關系類型及屬性 構建完成后的主泵知識圖譜部分關系、節點可視化圖,如圖6所示。 圖6 主泵知識圖譜示例 為了對基于知識圖譜的旋轉機械診斷方法的診斷性能進行測試,筆者以某核電廠存儲的主泵歷史故障案例數據為基礎[26],獲取了31個征兆完整的故障案例,并在此基礎上對測試用例進行了設計[15]1384。測試用例設計步驟如下: (1)從歷史案例中獲取各故障與征兆現象間的對應關系,每個故障對應有n個征兆; (2)對各故障設置缺失1個征兆、缺失2個征兆…缺失n-1個征兆的情形,對余下的征兆進行組合,即得到測試用例。 該處以主推力瓦磨損故障對測試用例設計進行說明。該故障發生時可能出現的征兆現象,即:軸承室油位異常、中油箱溫度偏高、主推力瓦溫度偏高。不同征兆間的關系為“與”關系,即只有在上述征兆同時出現時,才可斷定主推力瓦磨損故障發生。 用于驗證診斷方法的測試用例信息,如表9所示。 表9 測試用例 由于輸出的故障診斷結果存在包含多個可能診斷結果的情況,筆者將正確診斷結果排在輸出診斷結果前兩位的,認定為診斷正確。 診斷準確率計算方式為: (14) 式中:n—測試用例總數;N—診斷準確的測試用例數。 筆者將上述測試用例進行診斷驗證,其中完整輸入征兆現象的測試用例中,診斷準確的個數為25個,缺失征兆現象的測試用例中診斷準確的個數為186個。 診斷結果如表10所示。 表10 診斷推理方法驗證結果 由表10可知:當輸入征兆完整時,故障診斷準確率僅為80.6%,這是因為在所構建的知識圖譜中,故障現象與故障原因間存在一對多的映射關系,同時存在輸入一條故障現象就滿足診斷所需的完整故障現象的情況。在這種情況下,筆者提出的方法會得到多條故障診斷結果,且多條診斷結果無法進一步根據已有信息進行排序。因此,反而不能得到準確的診斷結果。 筆者將基于知識圖譜的故障診斷方法與傳統的基于規則的故障診斷推理方法進行對比分析,在征兆現象缺失的情況下,驗證基于知識圖譜的旋轉機械故障診斷方法進行故障診斷的效果。 在整合的主泵故障診斷領域知識基礎上,筆者對主泵故障診斷規則進行提取。主泵故障診斷規則可表示為如下形式:“IF條件1AND條件2AND…THEN結論”,多個診斷前提條件間的與、或關系使用“AND”或者“OR”進行表示[13]4444-4445;上文中提及的主推力瓦磨損故障提取后的診斷規則可表示為:“IF軸承室油位異常AND中油箱溫度偏高AND主推力瓦溫度偏高THEN主推力瓦磨損”。 根據整合后的主泵故障診斷知識,筆者提取出主泵故障診斷規則后,對上述202個缺失故障現象的測試用例進行診斷,診斷結果對比如表11所示(筆者提出的診斷方法為方法1,傳統的基于規則的故障診斷方法為方法2)。 表11 診斷結果對比 表11中的結果表明:方法1的診斷準確率為92.1%,遠高于方法2的診斷準確率;在征兆現象缺失時,筆者提出的方法的診斷效果遠好于傳統的基于規則的故障診斷推理方法,能夠有效地解決征兆現象缺失時難以進行準確診斷的問題; 同時,結合表(10,11)中的診斷結果來看,基于知識圖譜的旋轉機械故障診斷方法的總體診斷準確率較高,達到90.6%。 在對旋轉機械進行故障診斷時,為了有效地解決故障征兆缺失時,采用傳統的基于規則的故障診斷推理方法,進行故障診斷時出現的結果準確率低的問題,筆者采用本體知識表示方法對旋轉機械故障診斷知識進行知識表達,構建旋轉機械故障診斷知識圖譜,并提出了基于知識圖譜的旋轉機械故障診斷方法,最后,以核電廠主泵為例,對該方法的有效性進行了驗證,對其診斷性能進行了測試。 研究結果表明: (1)在旋轉機械故障診斷驗證中,該方法的故障診斷準確率為92.1%,遠遠高于傳統的基于規則的故障診斷推理方法的準確率,可以有效解決以往因征兆缺失,而使故障診斷不準確的問題; (2)該方法通過知識圖譜技術對設備結構間關系加以利用,并將其融入到診斷推理中。驗證結果表明:該方法的測試用例的整體準確率為90.6%,實現了對設備結構間關系的有效利用。同時,知識圖譜的應用使該方法不失一般性,便于遷移運用到其他設備上,可為設備智能診斷方法提供新的思路。 在后續的工作中,筆者將在旋轉機械診斷知識圖譜的基礎上,進一步對旋轉機械故障診斷推理過程中存在的不確定性問題進行研究。
2 基于知識圖譜的旋轉機械故障診斷方法
2.1 知識圖譜的構建

2.2 基于知識圖譜的診斷推理方法


3 實例驗證
3.1 主泵故障診斷知識圖譜構建




3.2 基于知識圖譜的診斷方法測試

3.3 方法對比
4 結束語
猜你喜歡
現代裝飾(2022年1期)2022-04-19 13:47:32
當代工人(2020年8期)2020-05-25 09:07:38
現代裝飾(2020年2期)2020-03-03 13:37:44
中學生數理化·高一版(2018年9期)2018-10-09 06:46:48
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
中學生數理化·高一版(2017年9期)2017-12-19 12:15:14
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動、測試與診斷(2014年5期)2014-03-01 01:14:21