一種人形機器人北斗導(dǎo)航自適應(yīng)規(guī)劃技術(shù)研究
2022-09-22 14:39:28李峰,岳云,張巍,李寧
機械設(shè)計與制造 2022年9期
關(guān)鍵詞:信號
李 峰,岳 云,張 巍,李 寧
(1.中原工學(xué)院信息商務(wù)學(xué)院機械工程系,河南 鄭州 450007;2.鄭州宇通集團有限公司,河南 鄭州 450007)
1 引言
隨著社會的發(fā)展,機器人特別是人形機器人智能化程度不斷提高,人形機器人由于結(jié)構(gòu)更接近于人類,可協(xié)助人類做更多的事情,比如在車輛無人駕駛、特殊環(huán)境生產(chǎn)、航空航天方面,人形機器人的使用可以節(jié)約大量的人力、物力、財力,大大提高社會生產(chǎn)力。人類期望機器人能夠扮演更加智能的角色,能夠更加穩(wěn)定的完成任務(wù),能夠在更廣大的范圍內(nèi)完成角色,自適應(yīng)性更高。隨著5G移動網(wǎng)絡(luò)技術(shù)的成形,可以通過網(wǎng)絡(luò)技術(shù)確定機器人的作業(yè)空間和運動環(huán)境,協(xié)調(diào)機器人的運動,控制機器人的工作,提高機器人的智能化程度,但提高機器人智能化程度的基礎(chǔ)是解決機器人在不同的導(dǎo)航環(huán)境下進行路徑規(guī)劃選擇問題。機器人運動狀態(tài)管理,機器人的運動路線決策,是自動化控制技術(shù)、人工智能技術(shù)、衛(wèi)星導(dǎo)航技術(shù)等高科技技術(shù)的充分融合[1-3]。文獻[4-7]對人形機器人動作方式、結(jié)構(gòu)方面做了相關(guān)的研究,文獻[8-11]在機器人導(dǎo)航方面方面做了相關(guān)研究,但在人形機器人衛(wèi)星導(dǎo)航方面卻未有研究發(fā)現(xiàn)。而人形機器人的衛(wèi)星導(dǎo)航,特別是在我國北斗導(dǎo)航系統(tǒng)下的導(dǎo)航問題的研究一方面可以提高人形機器人的智能程度,一方面可以進一步推廣普及我國自主研發(fā)的北斗導(dǎo)航系統(tǒng)。
針對人形機器人自適應(yīng)程度低,機器人行走智能化程度不高,特提出了利用自適應(yīng)控制法的來實現(xiàn)移動機器人行走路線及姿態(tài)的自適應(yīng)規(guī)劃。通過對人形機器人行走路線及位姿的優(yōu)化設(shè)計及自主決策,達到了機器人通過衛(wèi)星導(dǎo)航,自主決定運動路線及運動策略,實現(xiàn)了預(yù)定目標,縮短了控制時間,提高了控制效率,增強了人形機器人控制的智能化程度。
2 人形機器人導(dǎo)航自適應(yīng)控制系統(tǒng)設(shè)計
2.1 人形機器人
人形機器人種類繁多,根據(jù)動力源可分為液壓驅(qū)動、電機驅(qū)動等,根據(jù)自由度也可分為多種自由度的機器人。本課題所用機器人為九自由度舵機驅(qū)動的人形機器人,如圖1所示。機器人轉(zhuǎn)角分辨率10,直線行走分辨率50mm,整體500g,采用2000ma鋰電續(xù)航,續(xù)航能力強。機器人結(jié)構(gòu)勻稱,更符合人形機構(gòu)。現(xiàn)在人形機器人的控制主要依靠前期對機器人進行程序設(shè)定,將設(shè)計好的動作輸入機器人內(nèi)部存儲器,依靠固化程序?qū)崿F(xiàn)機器人完成特定的簡單動作,人形機器人自適應(yīng)程度不高,智能化程度較低。
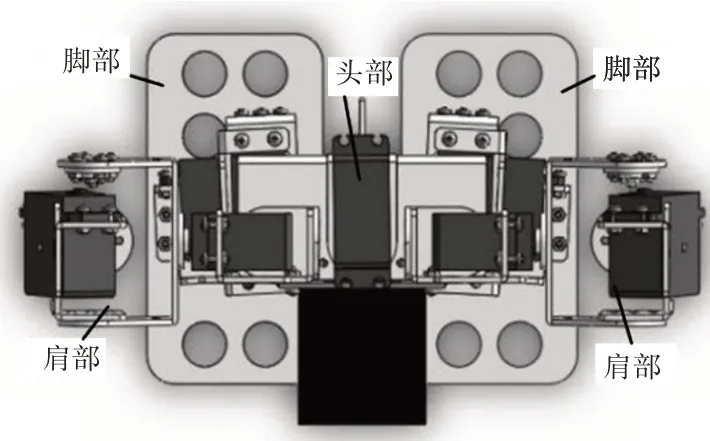
圖1 九自由度人形機器人Fig.1 Nine Degree of Freedom Humanoid Robot
2.2 九自由度人形機器人自適應(yīng)導(dǎo)航系統(tǒng)硬件設(shè)計
為了能更好地對九自由度人形機器人進行導(dǎo)航,提高對人形機器人導(dǎo)航的智能化程度,增強機器人的自適應(yīng)性,特對原九自由度人形機器人自導(dǎo)航主動控制系統(tǒng)進行優(yōu)化改進,增加導(dǎo)航航向路線自適應(yīng)規(guī)劃功能,原機器人導(dǎo)航系統(tǒng)雖然能夠在完成目的地坐標輸入后自動生成導(dǎo)航軌跡,但是航向調(diào)整智能化程度不高,人性化程度較低;另外,機器人在經(jīng)過導(dǎo)航后,到達目的坐標區(qū)域后不能很好地確定是否達到目標,不能再做最終的位姿調(diào)整,導(dǎo)航精度低。為此,特對系統(tǒng)進行優(yōu)化設(shè)計,以提高系統(tǒng)的自適應(yīng)性。人形機器人自適應(yīng)導(dǎo)航系統(tǒng)硬件主要包括人形移動機器人,自導(dǎo)航主動控制器,北斗導(dǎo)航儀,監(jiān)控微機。系統(tǒng)中機器人所在位置通過北斗導(dǎo)航儀獲得,通過人機界面輸入中央處理器,通過中央處理器處理后自動生成導(dǎo)航路線、軌跡,又通過中間控制器發(fā)出信號控制機器人實現(xiàn)導(dǎo)航的路線、軌跡,機器人在運行過程中可通過視覺采集系統(tǒng)將信號通過微機直觀地展示給監(jiān)控人員,以便于對一些特殊情況進行處理,機器人本身也可搭載障礙物、深坑信息采集裙,以便及時對特殊路徑做出規(guī)劃。本試驗在不改變原有就自由度人形機器人自導(dǎo)航主動控制試驗平臺的基礎(chǔ)上對機器人自導(dǎo)航主動控制原理進行改進,以提高機器人的自適應(yīng)程度。
人形機器人自適應(yīng)主動控制系統(tǒng)中,北斗定位系統(tǒng),自適應(yīng)規(guī)劃系統(tǒng)和被導(dǎo)航機器人為三大基本組成部分,如圖2所示。北斗導(dǎo)航定位系統(tǒng)是機器人自導(dǎo)航的依據(jù),課題使用的是ICE610冰河北斗導(dǎo)航儀,可以完成對人形機器人的北斗系統(tǒng)定位。自適應(yīng)規(guī)劃系統(tǒng)主要由人機界面,中央處理器和中間控制器組成,人機界面主要采用顯控SK—070AS 7寸工業(yè)觸摸屏,中央處理器采用比較常見的西門子S7—200PLC完成,它與工控微機和障礙物及深坑探測模塊連接,完成信息通訊。中間控制器為自己設(shè)計研發(fā),主要完成中央處理器輸出信號和人形機器人控制信號的轉(zhuǎn)換,實現(xiàn)人形機器人的自適應(yīng)主動導(dǎo)航。人形機器人為九自由度人形機器人,通過QROBRT軟件進行程序輸入,完成機器動作分解程序設(shè)定。
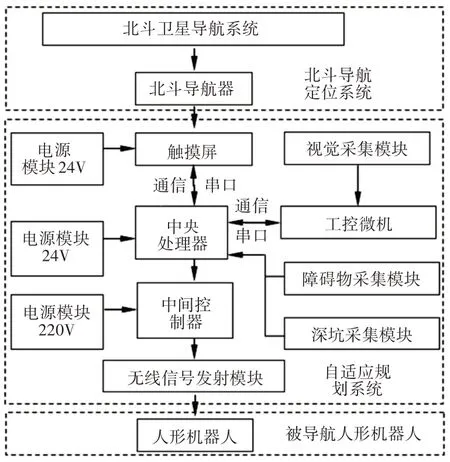
圖2 人形機器人自適應(yīng)主動控制系統(tǒng)圖Fig.2 Humanoid Robot Adaptive Active Control System Picture
3 人形機器人導(dǎo)航算法設(shè)計
3.1 九自由度人形機器人運動學(xué)模型
為得到九自由度人形機器人的自導(dǎo)航運動控制算法,需要分析機器人的行走移動軌跡,為此需要對機器人腳部移動狀況進行分析研究,建立機器人移動模型,如圖3所示。
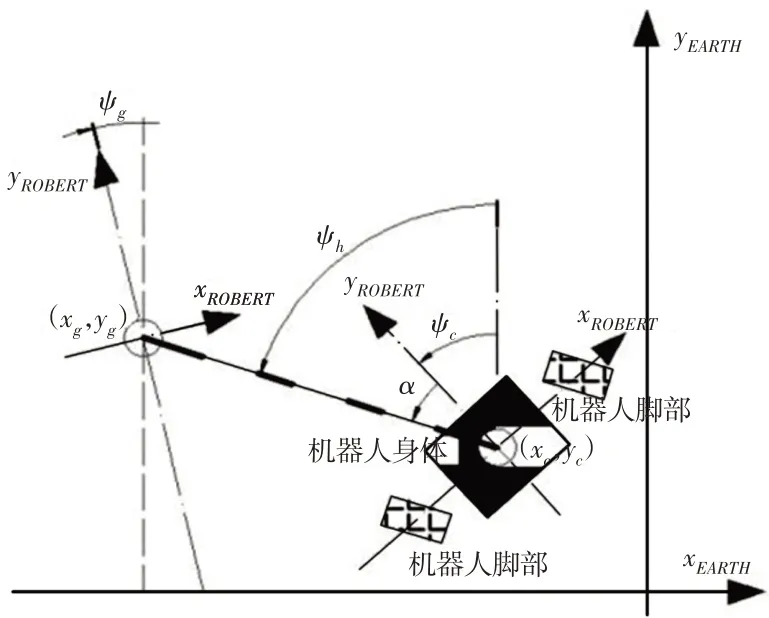
圖3 機器人移動模型Fig.3 Robot Mobile Model
圖中:α—機器人兩腳與機器人縱軸yROBERT之間的夾角,為轉(zhuǎn)向角;ψ—yROBERT與地面坐標系yEARTH之間的夾角,為航向角;yROBERT—兩腳連線的垂直中心線方向;yEARTH—地球正北方向;(xc,yc)—機器人當(dāng)前坐標;(xg,yg)—機器人目的地坐標;ψh—行走過程中的機器人的航向角。由現(xiàn)在的坐標和目的地坐標得到:

為便于控制,令t=n*T可將△T設(shè)置為控制間隔時間T,則:
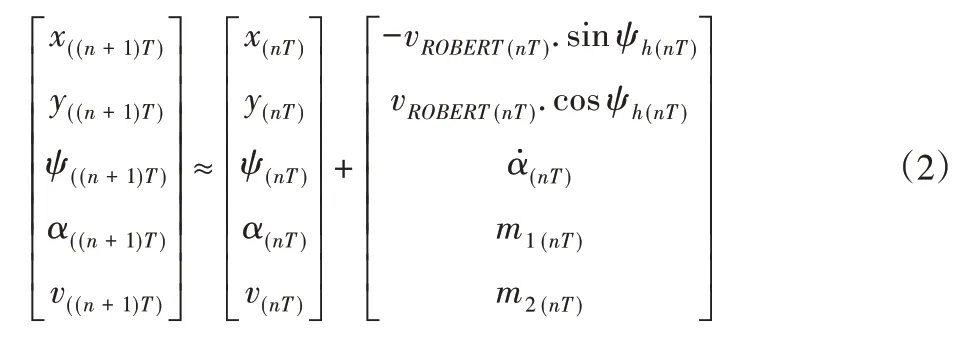
為簡化公式,令:

式中:V—機器人直線行走速度。因為人形機器人每直線行走信號行走理論值由自身結(jié)構(gòu)決定,為△S,給定機器人直線行走信號數(shù)nx,則機器人直線行走控制方程為:

因為轉(zhuǎn)向角可以控制,令轉(zhuǎn)向角:

式中:K—誤差系數(shù),可初定為1;nz—機器人轉(zhuǎn)向信號數(shù);△α—單個轉(zhuǎn)向信號機器人可轉(zhuǎn)角度。

式中:ψc—初始姿態(tài);ψg—終點設(shè)定姿態(tài);ψh—航向角;nz—機器人從初始姿態(tài)達到航向所生成的航向調(diào)整轉(zhuǎn)向信號數(shù);nq—機器人從航向角達到終點設(shè)定姿態(tài)所生成的姿態(tài)調(diào)整轉(zhuǎn)向信號數(shù);△α—單個轉(zhuǎn)向信號機器人可轉(zhuǎn)角度。
3.2 機器人自適應(yīng)路徑規(guī)劃控制過程設(shè)計
為了提高人形機器人的自適應(yīng)性,系統(tǒng)設(shè)計該人形機器人北斗導(dǎo)航自適應(yīng)主動控制不但能夠在輸入機器人現(xiàn)在所處地點北斗坐標和目標地點北斗坐標后自動生成導(dǎo)航路線,發(fā)出指令,控制機器人自動完成任務(wù),而且能夠自適應(yīng)選擇最佳人形機器人生成路徑的姿態(tài),以便優(yōu)化動作程度,提高人工智能程度。機器人自適應(yīng)主動控制系統(tǒng)在輸入相關(guān)信息后,先根據(jù)所處位置和目標位置自動生成行走路線;然后根據(jù)自身位姿和所需航向,自適應(yīng)選擇左調(diào)、右調(diào)自身姿態(tài),達到所需航向;接著,根據(jù)航向和前期生成路線移動,完成移動軌跡;再根據(jù)最終需要姿態(tài)自適應(yīng)擬人化左調(diào)、右調(diào)姿態(tài)。而后,根據(jù)北斗導(dǎo)航信息校核距離誤差和姿態(tài)誤差,自適應(yīng)調(diào)整位置、姿態(tài),完成任務(wù),如圖4所示。具體步驟如下:
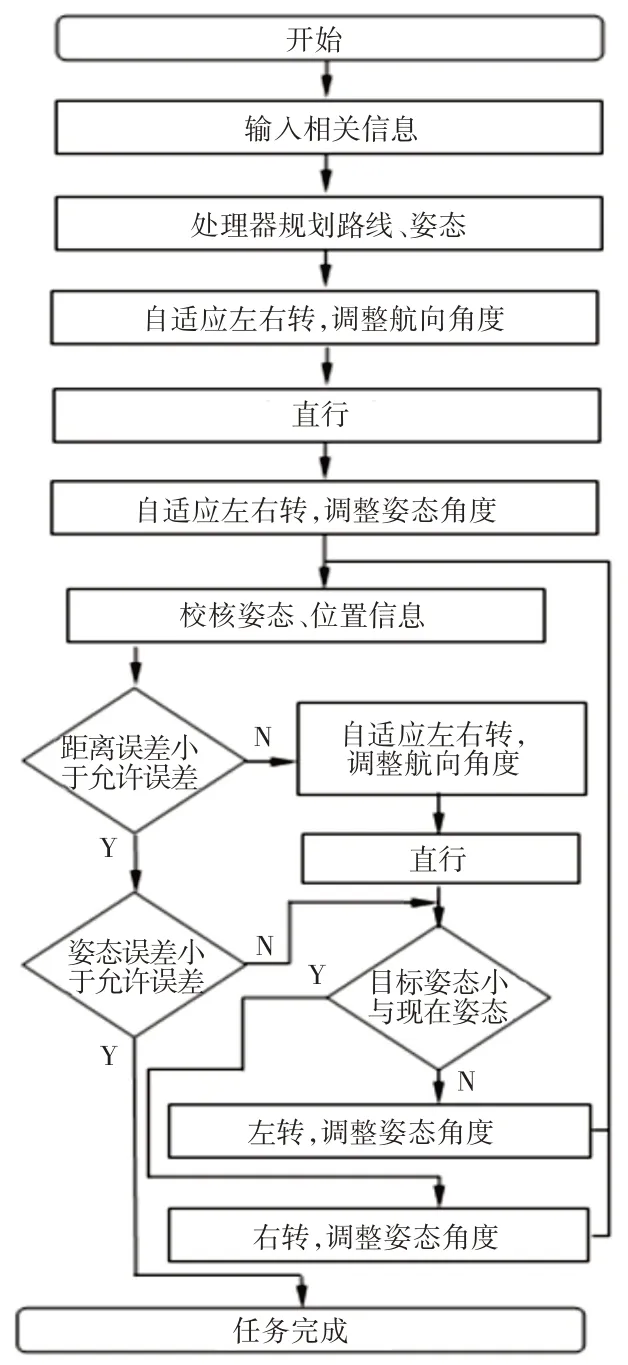
圖4 人形機器人北斗導(dǎo)航自適應(yīng)主動控制流程圖Fig.4 Humanoid Robot Beidou Navigation Adaptive Active Control Flowchart
(1)輸入(xc,yc)、(xg,yg)、ψc、ψg、TZ、Tx、△α、△s、K、Kx、Kq、Kz,其中:(xc,yc)—機器人初始點國家2000坐標;(xg,yg)—機器人目標點國家2000坐標;ψc—機器人初始位置姿態(tài);ψg—機器人到達目標位置后需要確定的姿態(tài);K—整體調(diào)整誤差系數(shù);Kx—直線調(diào)整誤差系數(shù);Kq—姿態(tài)調(diào)整誤差系數(shù);Kz—航向調(diào)整誤差系數(shù);nz—給定機器人轉(zhuǎn)向信號數(shù);nx—給定機器人直線信號數(shù);nq—給定機器人姿態(tài)信號數(shù);△α—單個信號機器人調(diào)整角度;△s—單個信號機器人調(diào)整位移;TZ—轉(zhuǎn)向信號信號時間間隔;Tx—直線行走信號時間間隔。
(2)機器人行走路線主要參數(shù)nz、nx、nq規(guī)劃。根據(jù)前文中確定參數(shù)和式α=Kz×(ψg-ψc),確定人形機器人行走時所需器人行走時所需轉(zhuǎn)角α,又ɑ=Kz×(ψg-ψc)=nz×△α,根據(jù)前期測定的機器人每信號調(diào)整角度△α,得需給定機器人轉(zhuǎn)向信號數(shù)nz=α/△α,利用STL語言將公式程序化(見圖5中nz規(guī)劃程序段);
根據(jù)前文中確定參數(shù)和S=Kx×((yg-yc)∧2+(xg-xc)∧2)∧0.5,確定人形機器人行走時所需行走位移S,根據(jù)前期測定的機器人每信號調(diào)整位移△s,得需給定機器人行走信號數(shù)nx=S/△s,利用STL語言將公式程序化(見圖5中nx規(guī)劃程序段);
根據(jù)前文中確定參數(shù)和ɑq=Kq×(ψg-ψc)=nq×△α,根據(jù)前期測定的機器人每信號調(diào)整姿態(tài)△α,得需給定機器人姿態(tài)調(diào)整信號數(shù)nq=α/△α,利用STL語言將公式程序化(見圖5中nq規(guī)劃程序段);
(3)控制器發(fā)出機器人轉(zhuǎn)向信號nz次,每次間隔TZ,機器人完成航向調(diào)整,控制原理見圖5中航向調(diào)整程序段;
(4)控制器發(fā)出機器人直行信號nx次,每次間隔Tx,機器人完成位移運動,控制原理見圖5中前行程序段;
(5)控制器發(fā)出機器人姿態(tài)調(diào)整信號nq次,每次間隔TZ,機器人完成姿態(tài)調(diào)整,控制原理見圖5中姿態(tài)調(diào)整程序段;
以上為前期人形機器人行走路線自適應(yīng)生成及動作過程,以下為人形機器人校核位置、姿態(tài),自適應(yīng)調(diào)整位置姿態(tài)過程。
(6)根據(jù)人形機器人現(xiàn)在所在地(xc,yc)、ψc,比較距離,看是否到達目的坐標范圍。如果達到目標范圍,SS≤R,比較姿態(tài),看是否到達目的坐標姿態(tài)范圍δ,控制原理見圖5中姿態(tài)再調(diào)整程序段。
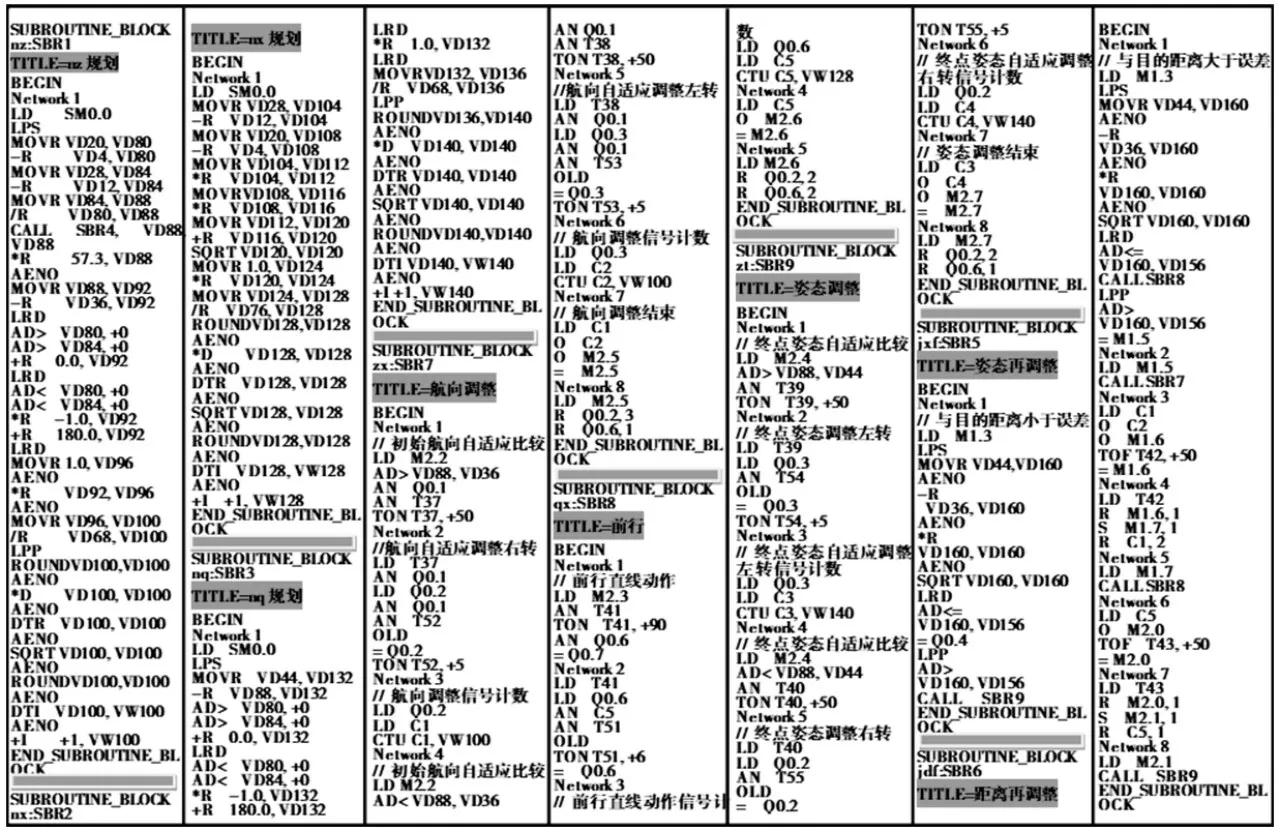
圖5 人形機器人北斗導(dǎo)航自適應(yīng)主動控制主要原理Fig.5 Humanoid Robot Beidou Navigation Adaptive Active Control Main Principle
①如果達到目標位移范圍后姿態(tài)調(diào)整。
如果姿態(tài)達到:|ψc-ψc|≤δ,停止,退出程序;
如果姿態(tài)達到:|ψg-ψc|>δ,需調(diào)整姿態(tài)。
接下來:
如果ψg>ψc,自適應(yīng)生成給定機器人轉(zhuǎn)向信號數(shù)nq,控制器發(fā)出機器人左轉(zhuǎn)向信號nq次,每次間隔Tz,機器人完成姿態(tài)調(diào)整;
如果ψg<ψc,自適應(yīng)生成機器人轉(zhuǎn)向信號數(shù)nq,控制器發(fā)出機器人右轉(zhuǎn)向信號nq次,每次間隔Tz,機器人完成姿態(tài)調(diào)整;
②如果未達到目標位移范圍,自適應(yīng)調(diào)整航向。
調(diào)整航向生成ɑ。根據(jù):ɑ=Kz×(ψg-ψc)=nz×△ɑ,確定九自由度人形機器人行走時所需轉(zhuǎn)角ɑ,根據(jù)機器人內(nèi)部確定的△ɑ確定機器人轉(zhuǎn)向信號數(shù)nz;
如果ψg>ψc,求得需給定機器人轉(zhuǎn)向信號數(shù),控制器發(fā)出機器人左轉(zhuǎn)向信號nz次,每次間隔Tz,機器人完成航向調(diào)整;如果ψg<ψc,求得需給定機器人轉(zhuǎn)向信號數(shù)nz,控制器發(fā)出機器人右轉(zhuǎn)向信號nz次,每次間隔Tz,機器人完成航向調(diào)整;
確定九自由度人形機器人行走時所需行走位移,根據(jù)機器人內(nèi)部確定的△s和公式,求得需給定機器人轉(zhuǎn)向信號數(shù)nx,控制器發(fā)出機器人轉(zhuǎn)向信號nx次,每次間隔Tx,機器人完成直線移動;
根據(jù)ɑq=Kq×(ψg-ψc)=nq×△ɑ和機器人內(nèi)部確定的△ɑ,求得需給定機器人姿態(tài)調(diào)整信號數(shù)nq。
如果ψg>ψc,求得需給定機器人轉(zhuǎn)向信號數(shù)nq,控制器發(fā)出機器人左轉(zhuǎn)向信號nq次,每次間隔Tz,機器人完成姿態(tài)調(diào)整;如果ψg<ψc求得需給定機器人轉(zhuǎn)向信號數(shù)nq,控制器發(fā)出機器人右轉(zhuǎn)向信號nq次,每次間隔Tz,機器人完成姿態(tài)調(diào)整。根據(jù)以上控制流程,人形機器人可完成行走路線自適應(yīng)規(guī)劃過程,并調(diào)整好最終姿態(tài),達到設(shè)定任務(wù)。
3.3 主要運動控制原理
根據(jù)人形機器人北斗導(dǎo)航自適應(yīng)主動控制原理,操作人員先將不同的數(shù)據(jù)、參數(shù)存儲到不同的地址,然后主動控制器自動生成導(dǎo)航軌跡、姿態(tài),并將主要參數(shù)存入固定的寄存器中。接下來,人形機器人按照自動生成的軌跡先根據(jù)航向要求自適應(yīng)比較,調(diào)整航向。航向調(diào)整結(jié)束后,根據(jù)生成軌跡一步一步朝著目的地步行,在完成直線動作后,繼續(xù)按照前面生成的姿態(tài)調(diào)整要求調(diào)整姿態(tài)。這時,人形機器人自適應(yīng)主動控制系統(tǒng)根據(jù)現(xiàn)在所處位置自適應(yīng)比較距離和姿態(tài),生成調(diào)整路線、姿態(tài),并完成調(diào)整。利用stl語言描述了人形機器人北斗導(dǎo)航自適應(yīng)主動控制的主要控制原理,如圖5所示。根據(jù)圖5原理,結(jié)合圖2人形機器人北斗導(dǎo)航自適應(yīng)主動控制硬件系統(tǒng),可實現(xiàn)人形機器人的自適應(yīng)導(dǎo)航控制。
4 人形機器人導(dǎo)航試驗研究
4.1 人形機器人行走路線自適應(yīng)規(guī)劃試驗簡介
根據(jù)試驗所建立的環(huán)境,依據(jù)北斗導(dǎo)航系統(tǒng),測得試驗室機器人起點所在坐標,分別設(shè)定兩個目的坐標,每個目的坐標設(shè)計兩個姿態(tài),以此來進行試驗。
試驗?zāi)康囊环矫鏅z驗人形機器人北斗導(dǎo)航能否實現(xiàn)導(dǎo)航軌跡自生成,另一方面觀察導(dǎo)航系統(tǒng)的自適應(yīng)性,其中理想軌跡坐標為機器人自導(dǎo)航系統(tǒng)在沒有原理誤差和系統(tǒng)誤差的情況下應(yīng)該行走的軌跡,而仿真軌跡為機器人經(jīng)過機器人自適應(yīng)導(dǎo)航主動控制系統(tǒng)分析運算,自動生成的軌跡曲線,是機器人理論上經(jīng)過自適應(yīng)導(dǎo)航主動控制系統(tǒng)控制后應(yīng)該走的路線、軌跡、航向、姿態(tài),而實際軌跡為機器人自適應(yīng)北斗導(dǎo)航試驗人形機器人實際的軌跡及姿態(tài)。試驗時,首先,對人形機器人北斗導(dǎo)航自適應(yīng)控制系統(tǒng)進行初始化設(shè)置,輸入相關(guān)參數(shù),如表1、表2所示。
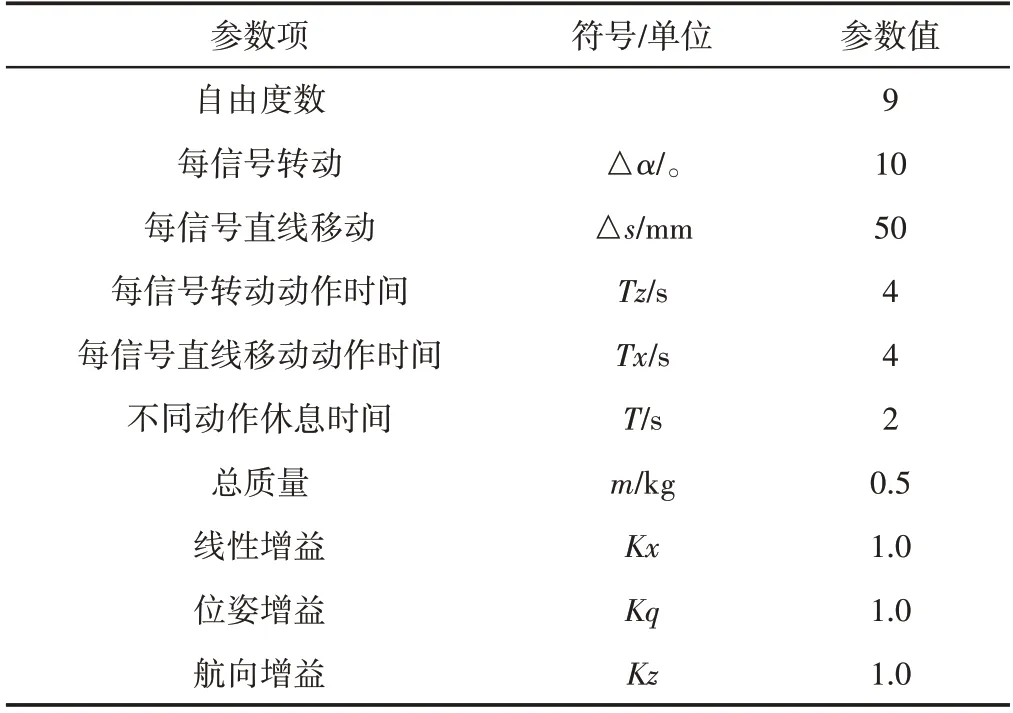
表1 試驗用人形機器人相關(guān)參數(shù)Tab.1 Test Humanoid Robot Related Parameters
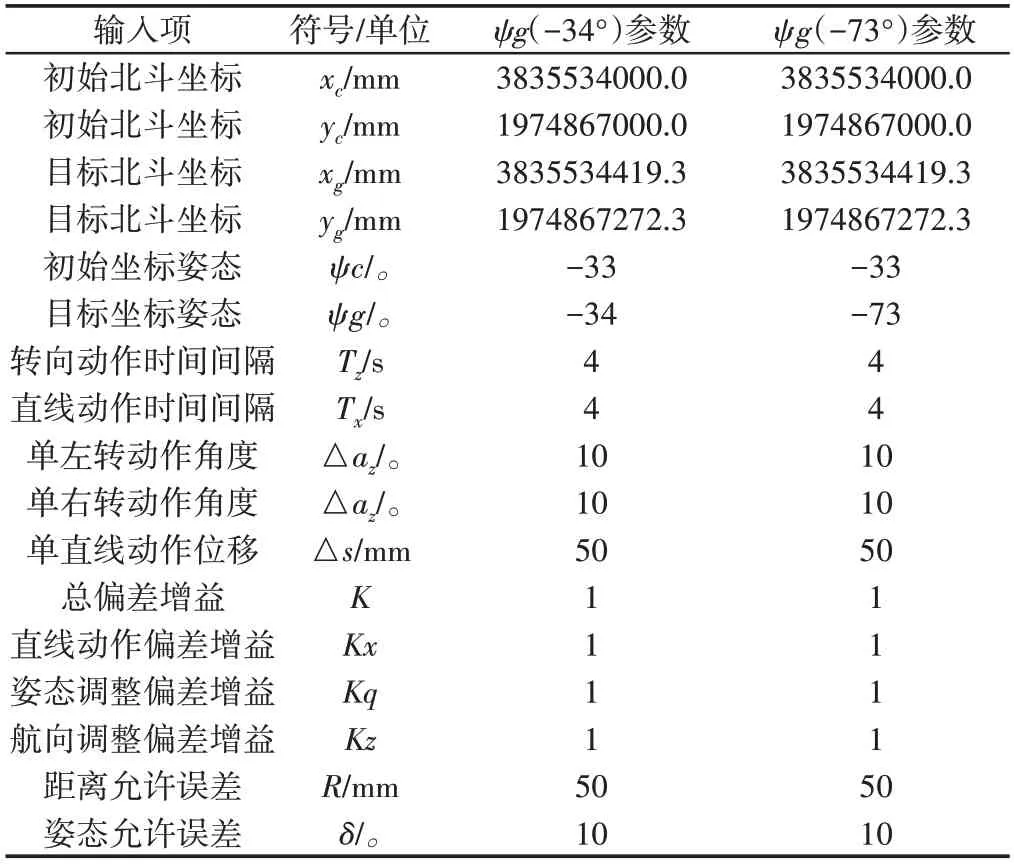
表2 人形機器人自適應(yīng)北斗導(dǎo)航試驗初始設(shè)置相關(guān)參數(shù)Tab.2 Humanoid Robot Adaptive Test Initial Setting Parameters
然后,將機器人放入設(shè)定初始坐標位置,并設(shè)好初始姿態(tài)。接著,啟動自適應(yīng)導(dǎo)航系統(tǒng),人形機器人開始按照導(dǎo)航系統(tǒng)自動生成路線運行,主要參數(shù),如表3所示。
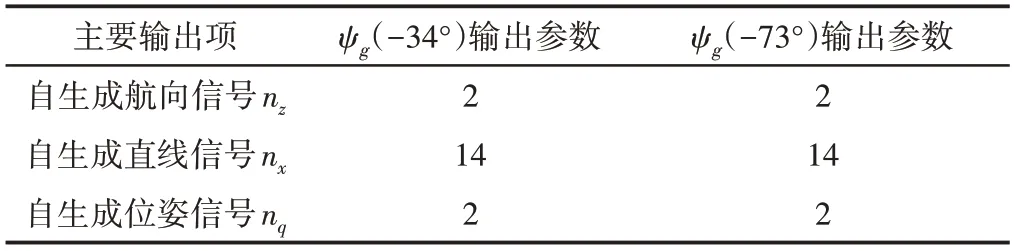
表3 人形機器人自適應(yīng)北斗導(dǎo)航試驗主要輸出Tab.3 Humanoid Robot Adaptive Test Main Output
試驗過程中,機器人每走一步,對其坐標位置及姿態(tài)進行記錄。為了驗證機器人能否人性化自動選擇左右調(diào)整姿態(tài),設(shè)定目標北斗坐標(3835534419.3,1974867272.3)下兩個姿態(tài),一個姿態(tài)為-34°,即北偏東56°,另一個姿態(tài)為-73°,即北偏東17°。因為從表4、表5 可以看出人形機器人理想狀態(tài)下中間航向為-53°,即北偏東37°,如果人形機器人能夠更人性化自動選擇左右調(diào)整姿態(tài),則機器人在終點調(diào)整姿態(tài)時,終點姿態(tài)為-34°的會自動左轉(zhuǎn),而終點姿態(tài)為-73°的會自動右轉(zhuǎn),而不是一直左轉(zhuǎn)到設(shè)定姿態(tài)。
4.2 人形機器人自適應(yīng)北斗導(dǎo)航試驗參數(shù)、曲線及分析
人形機器人自適應(yīng)北斗導(dǎo)航試驗在目標坐標為北斗坐標(3835534419.3,1974867272.3),最終目標姿態(tài)為-34°和-73°下自動生成的航向調(diào)整、直線移動、姿態(tài)調(diào)整信號數(shù),如表4、表5所示。是導(dǎo)航路線生成的主要階段,如果機器人在行走過程中沒有誤差及相關(guān)問題,人形機器人可以直接到達目的地并實現(xiàn)所要求姿態(tài)。但實際上由于誤差,人形機器人在完成姿態(tài)調(diào)成后實際位置和姿態(tài)與原要求還有差距,如果與設(shè)定目標的距離及姿態(tài)小于允許誤差,則認為機器人完成任務(wù),如果距離或者姿態(tài)與設(shè)定的目標位置距離、姿態(tài)相差大于允許誤差,則需要人形機器人根據(jù)現(xiàn)在所處位置、姿態(tài),進行位姿自適應(yīng)調(diào)整。由于本試驗后期人形機器人自適應(yīng)調(diào)整信號數(shù)據(jù)較多,如表6所示。因此整個導(dǎo)航過程分導(dǎo)航前期和后期兩個階段介紹。
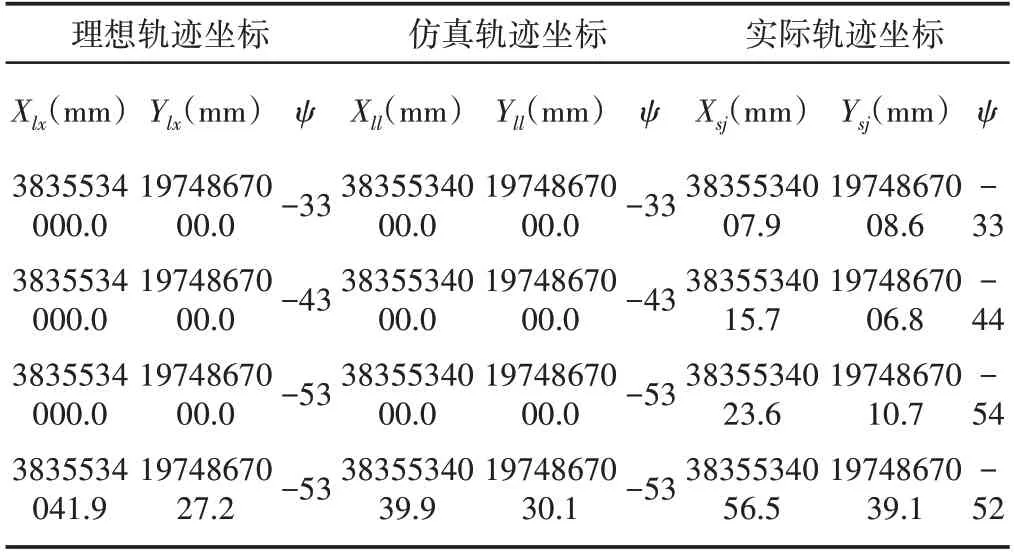
表4 機器人自適應(yīng)北斗導(dǎo)航試驗坐標、姿態(tài)參數(shù)(ψg -34°)Tab.4 Robot Adaptive Beidou Navigation Test Coordi?nates/Attitude Parameters(ψg -34°)
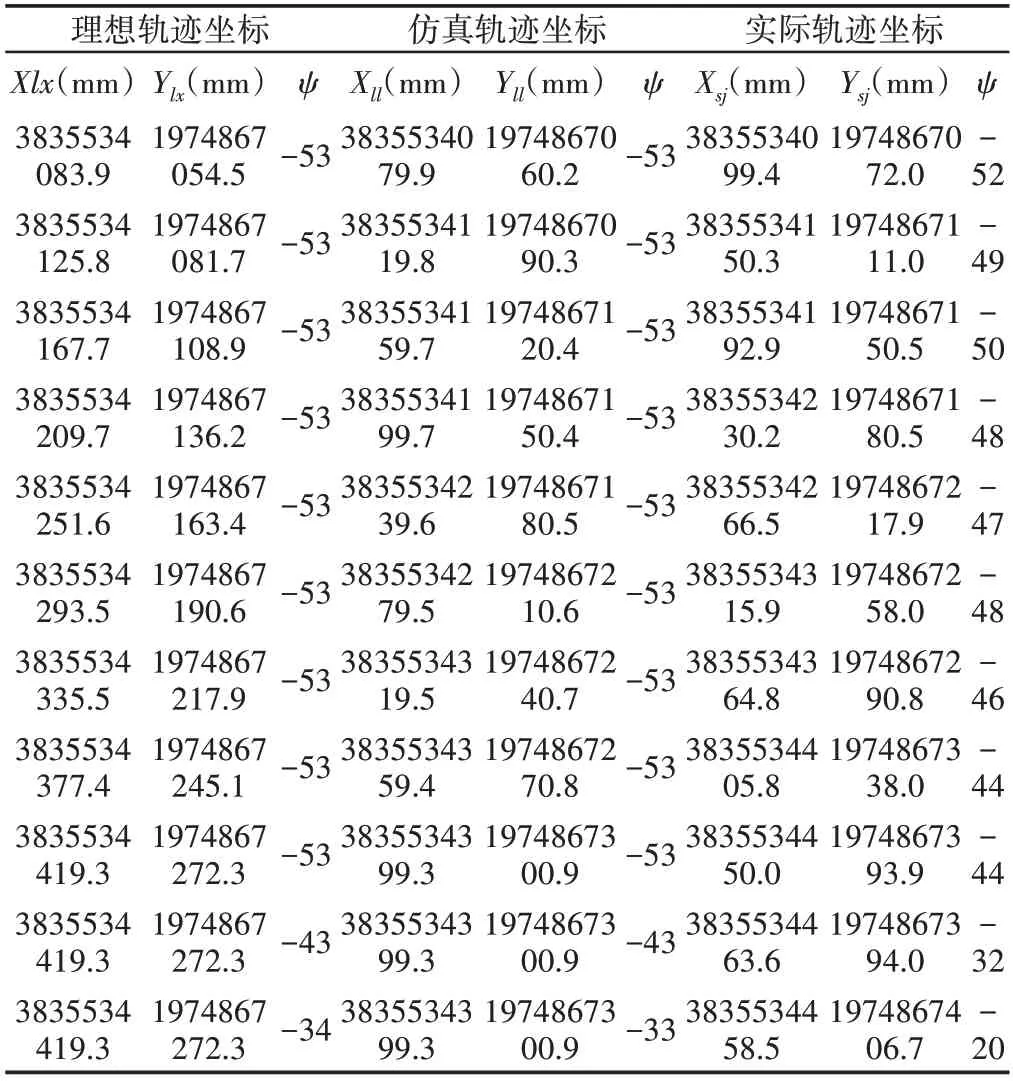
表4 (續(xù))機器人自適應(yīng)北斗導(dǎo)航試驗坐標、姿態(tài)參數(shù)(ψg -34°)Tab.4 (Cont)Robot Adaptive Beidou Navigation Test Co?ordinates/Attitude Parameters(ψg -34°)
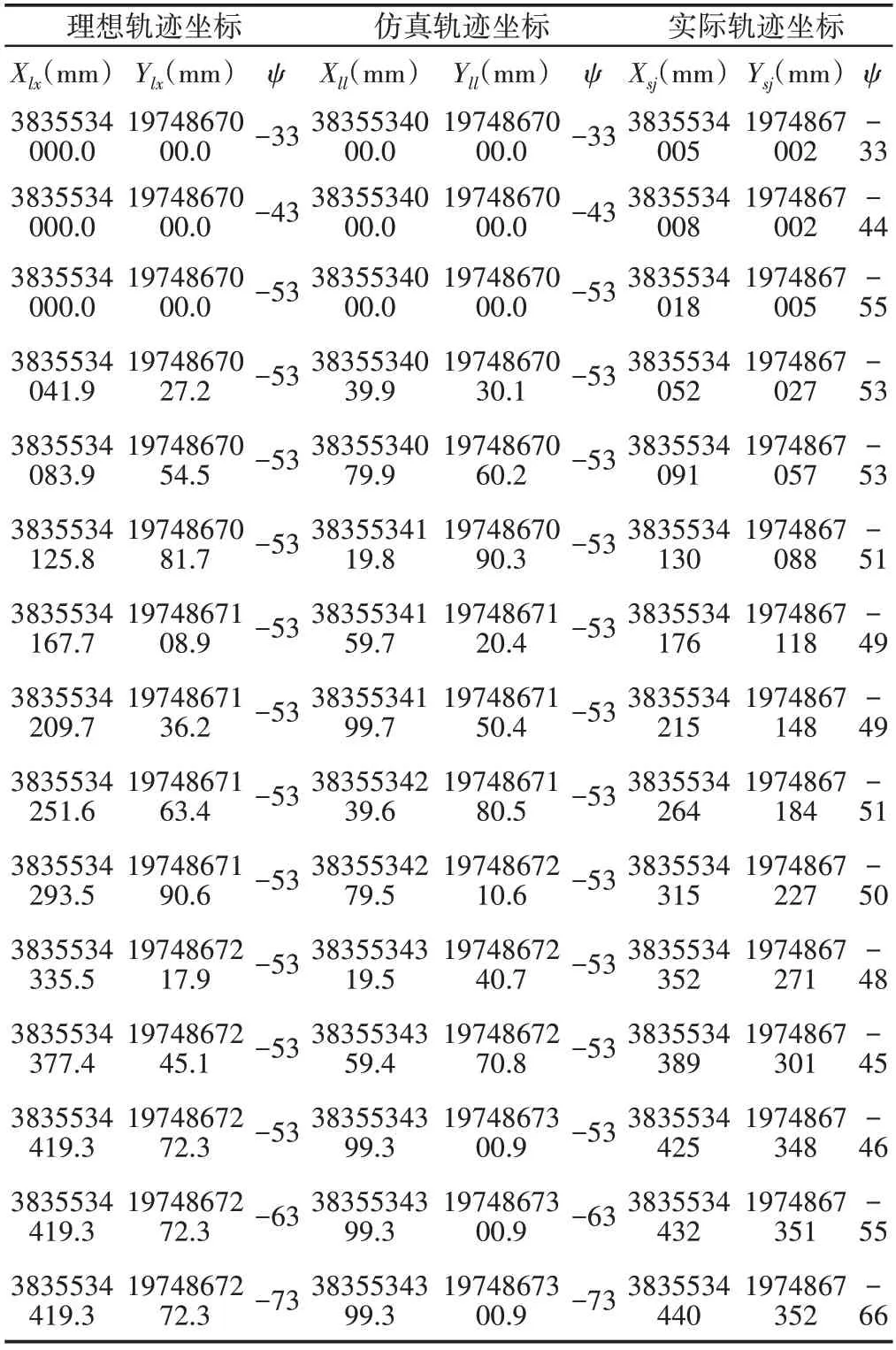
表5 機器人自適應(yīng)北斗導(dǎo)航試驗坐標、姿態(tài)參數(shù)(ψg -73°)Tab.5 Robot Adaptive Beidou Navigation Test Coordi?nates/Attitude Parameters(ψg -73°)
理想軌跡坐標、姿態(tài)為理想情況下,人形機器人動作時在沒有誤差的情況下,依據(jù)自適應(yīng)導(dǎo)航發(fā)出的信號數(shù),理想情況下應(yīng)該所處的北斗坐標和姿態(tài);仿真軌跡坐標、姿態(tài)為人形機器人動作時在沒有誤差的情況下,依據(jù)自適應(yīng)導(dǎo)航發(fā)出的信號數(shù),根據(jù)表2中參數(shù),人形機器人應(yīng)該所處的位置和姿態(tài),他與理想軌跡坐標、姿態(tài)的不同是因為人形機器人本身結(jié)構(gòu)等問題,因為人形機器人每信號轉(zhuǎn)動角度、直行位移、姿態(tài)調(diào)整角度理論上都是定值,不能夠像人一樣可以根據(jù)具體情況隨意調(diào)整,因此造成人形機器人自適應(yīng)導(dǎo)航系統(tǒng)自動生成的軌跡、姿態(tài)與理想軌跡、姿態(tài)由一定的差異,這種誤差是系統(tǒng)本身的誤差,是不可避免的。實際試驗時得到的軌跡坐標、姿態(tài)是在人形機器人動作時實時測量、記錄機器人的行走軌跡、姿態(tài)而得到的機器人的真實的行走路線、姿態(tài)。
雖然初始坐標、目標坐標相同,但終點要求姿態(tài)不同,如表3中所示,輸出信號數(shù)經(jīng)過內(nèi)部規(guī)劃數(shù)據(jù)相同,但信號數(shù)相同不代表人形機器人動作時左、右轉(zhuǎn)選擇不同,這需要通過試驗軌跡,姿態(tài)測定。
根據(jù)表4和表5所得數(shù)據(jù)可以得到終點姿態(tài)-34°和-73°時人形機器人自適應(yīng)北斗導(dǎo)航軌跡、姿態(tài)圖,如圖6、圖7所示。圖中分別由三條軌跡、姿態(tài),一條為機器人自適應(yīng)導(dǎo)航理想軌跡,一條為仿真軌跡,一條為導(dǎo)航試驗前期在終點位置沒有自適應(yīng)調(diào)整的曲線。
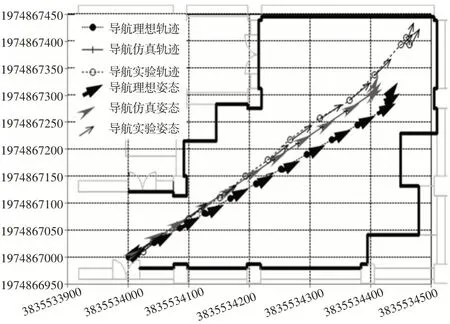
圖6 機器人自適應(yīng)北斗導(dǎo)航前期軌跡、姿態(tài)(ψg-34°)Fig.6 Robot Adaptive Beidou Navigation Early Trajectory/Attitude(ψg-34°)
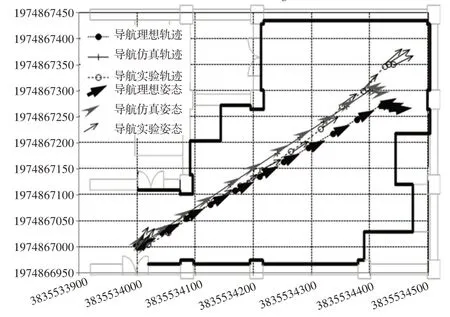
圖7 機器人自適應(yīng)北斗導(dǎo)航前期軌跡、姿態(tài)(ψg -73°)Fig.7 Robot Adaptive Beidou Navigation Early Trajectory/Attitude(ψg-73°)
因為導(dǎo)航初始位置和目標位置坐標相同,因此人形機器人理想軌跡和仿真軌跡大致相同,但由于終點要求位姿不同,圖6為要求姿態(tài)-34°,要求姿態(tài)-73°,如圖7所示。兩種要求下人形機器人在終點位置時姿態(tài)變化不同,圖6為東偏北轉(zhuǎn)向,圖7東偏南轉(zhuǎn)向。雖然轉(zhuǎn)向信號數(shù)由于偶然相同,如表4、表5所示。
但是每轉(zhuǎn)向信號使機器人動作不同,人形機器人不再單一通過左轉(zhuǎn)或右轉(zhuǎn)實現(xiàn)要求姿態(tài),而是左轉(zhuǎn)、右轉(zhuǎn)結(jié)合,自適應(yīng)實現(xiàn)要求姿態(tài),這在兩圖中理論、仿真、實際軌跡、姿態(tài)中都得到了證實。因為理論、仿真軌跡、姿態(tài)中是按照理想狀況下得到的軌跡、姿態(tài),因此不需要進行后期自適應(yīng)校核位置、姿態(tài)進行調(diào)整位置、姿態(tài)。
但從兩圖實際軌跡、姿態(tài)來看,人形機器人實際運動終點位置、姿態(tài)與設(shè)定目標位置、姿態(tài)還有較大差距,圖6終點位置坐標為(3835534458.5,1974867406.7),姿態(tài)-20°,與設(shè)定位置(3835534419.3,1974867272.3),姿態(tài)-34°,相距140mm,姿態(tài)相差14°,大于距離允許R的50mm,姿態(tài)允許δ的10°,因此需要后期校核位置,自適應(yīng)調(diào)整姿態(tài)、位置過程;圖7 終點位置坐標為(3835534440,1974867352),姿態(tài)-66°,與設(shè)定位置(3835534419.3,1974867272.3),姿態(tài)-73°,相距82mm,姿態(tài)相差7°,距離大于距離允許R的50mm,因此需要后期校核位置,自適應(yīng)調(diào)整姿態(tài)、位置過程。
從兩圖中機器人仿真軌跡、姿態(tài)和實際行走軌跡、姿態(tài)可以看出,機器人行走軌跡與理想行走軌跡重合度較高,理論上和實際上都已經(jīng)驗證了人形機器人北斗導(dǎo)航可以實現(xiàn)人形機器人的自適應(yīng)規(guī)劃控制。根據(jù)實際實驗結(jié)果,終點姿態(tài)-34°和-73°度機器人后期經(jīng)校核位置,自適應(yīng)調(diào)整階段的試驗坐標、姿態(tài)參數(shù),如表6所示。
由于人形機器人在到達位置后與原要求的位置、姿態(tài)要求的誤差大于系統(tǒng)設(shè)定的任務(wù)終結(jié)條件,因此人形機器人需要進行后期自適應(yīng)調(diào)整位置、姿態(tài)。兩條曲線終點自適應(yīng)調(diào)整階段信號數(shù)不同,如表6所示。
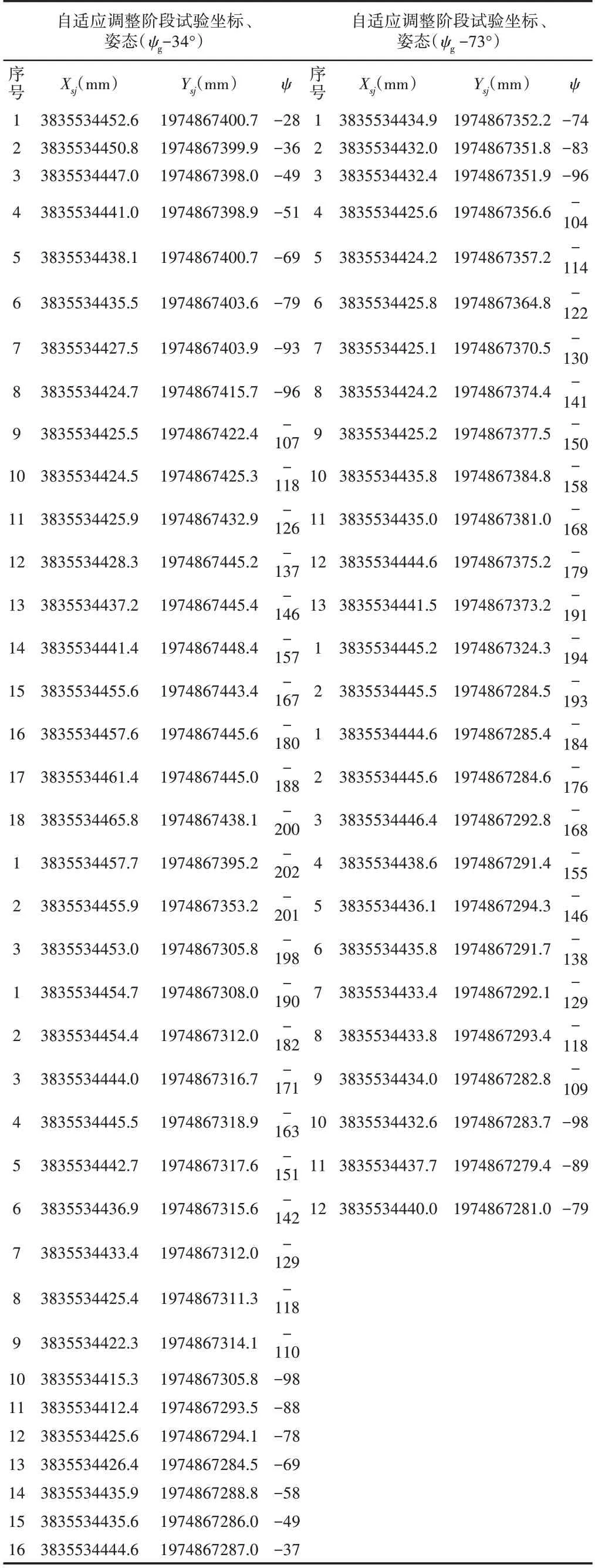
表6 終點姿態(tài)-34°和-73°機器人后期自適應(yīng)調(diào)整階段試驗坐標、姿態(tài)參數(shù)Tab.6 Test Coordinates and Attitude Parameters of Robot During Adaptive Adjustment Phase(ψg-34°and -73°)
這與誤差的大小和姿態(tài)的要求不同有關(guān)。終點姿態(tài)-34°自適應(yīng)調(diào)整階段導(dǎo)航系統(tǒng)規(guī)劃給出18次航向調(diào)整信號,3次直線運動信號,16次姿態(tài)調(diào)整信號,而終點姿態(tài)-73°自適應(yīng)調(diào)整階段導(dǎo)航系統(tǒng)規(guī)劃給出13次航向調(diào)整信號,2次直線運動信號,12次姿態(tài)調(diào)整信號。調(diào)整階段,人形機器人先右轉(zhuǎn)調(diào)整航向,后直線運動,再左轉(zhuǎn)調(diào)整姿態(tài),如圖8、圖9所示。
這說明人形機器人可以根據(jù)實際情況自適應(yīng)選擇左右轉(zhuǎn)完成相關(guān)任務(wù),智能化程度大大提高。終點位置坐標為(3835534444.6,1974867287.0),姿態(tài)-37°,與設(shè)定位置(3835534419.3,1974867272.3),姿態(tài)-34°,相距29.3mm,姿態(tài)相差3°,小于距離允許R的50mm,姿態(tài)允許δ的10°,如圖8所示。
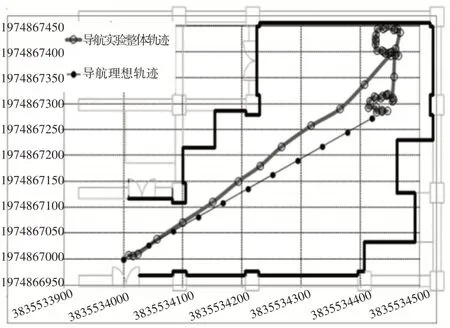
圖8 機器人自適應(yīng)北斗導(dǎo)航整體軌跡(ψg-34°)Fig.8 Overall Trajectory of Robot Adaptive Beidou Navigation(ψg-34°)
因此完成了任務(wù),達到了導(dǎo)航目標;終點位置坐標為(3835534440.0,1974867281.0),姿態(tài)-79°,與設(shè)定位置(3835534419.3,1974867272.3),姿態(tài)-73°,相距82mm,姿態(tài)相差6°,距離小于距離允許R的50mm,如圖9所示。
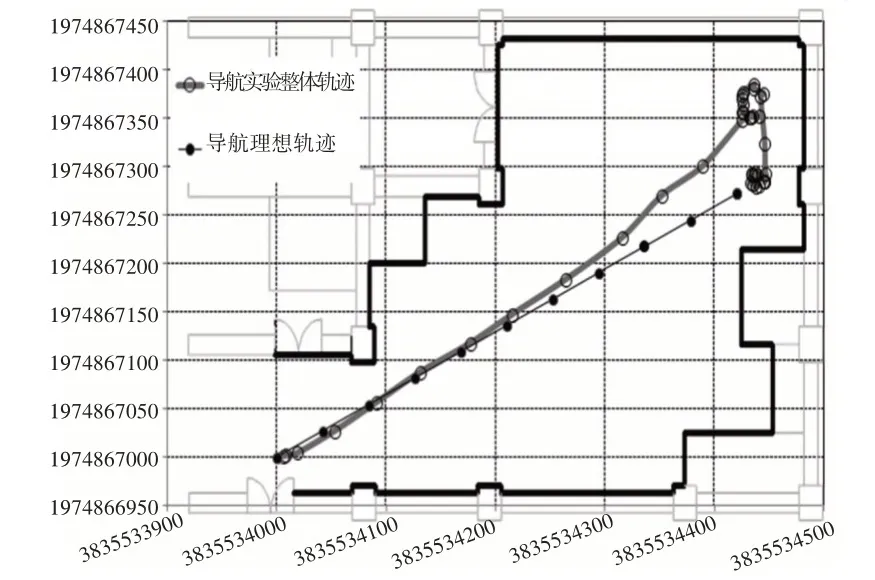
圖9 機器人自適應(yīng)北斗導(dǎo)航整體軌跡(ψg-73°)Fig.9 Overall Trajectory of Robot Adaptive Beidou Navigation(ψg-73°)
因此完成了任務(wù),達到了導(dǎo)航目標。從試驗結(jié)果可以看出,導(dǎo)航系統(tǒng)的自適應(yīng)性較強,智能化程度較高,達到了人形機器人自導(dǎo)航主動控制系統(tǒng)優(yōu)化設(shè)計的目的,自適應(yīng)性得到了加強。
5 結(jié)論
(1)針對人形機器人衛(wèi)星導(dǎo)航下的行走路線自適應(yīng)規(guī)劃問題,從實際應(yīng)用出發(fā),研發(fā)了一種可以利用北斗導(dǎo)航系統(tǒng)進行人形機器人自適應(yīng)路徑規(guī)劃控制的主動控制系統(tǒng)。(2)通過代數(shù)學(xué)方法和幾何學(xué)方法,在運動學(xué)分析的基礎(chǔ)上建立了人形機器人自適應(yīng)主動控制模型,得到了人形機器人位置、姿態(tài)、航向和人形機器人控制信號之間的關(guān)系。(3)通過stl 語言表達了人形機器人自適應(yīng)運動控制的控制原理,介紹了導(dǎo)航控制過程。(4)通過導(dǎo)航試驗,驗證了運動控制的控制原理和主動控制系統(tǒng)的正確性。導(dǎo)航試驗結(jié)果表明,所研發(fā)的主動控制系統(tǒng)可以實現(xiàn)人形機器人的自適應(yīng)路徑規(guī)劃控制導(dǎo)航,為后期人形機器人導(dǎo)航控制的研究搭建了良好的實驗平臺。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
