考慮通信延遲的衛星集群改進蜂擁控制
2022-09-23 06:01:48李思遠孫兆偉
宇航學報 2022年8期
李思遠,葉 東,孫兆偉
(哈爾濱工業大學航天學院衛星技術研究所,哈爾濱 150001)
0 引 言
隨著通信技術與小型化技術的快速發展,由多顆小衛星組成的衛星集群能夠利用無線通信進行組網飛行,從而實現傳統大衛星的復雜功能,并大幅度降低研制的成本和風險,顯著增強衛星系統的靈活性和魯棒性。不同于星座與編隊飛行,衛星集群不需要保持精確的空間構型,只需要其成員衛星在任務期間內保持適當的通信距離即可。
衛星集群在空間中會受到多種攝動的影響,如攝動、大氣阻力攝動、太陽光壓攝動和第三體引力攝動等。因此,衛星在不采用主動控制的情況下會發生漂移,無法保證星群的穩定。因此,對多攝動條件下的星群的動力學模型的建立是必不可少的。為簡化推導過程,獲得精確的相對運動模型,文獻[10]提出了一種基于參考衛星軌道要素的動力學建模方法,利用拉格朗日方程推導了考慮攝動的衛星相對運動模型。在此基礎之上,文獻[11]推導了攝動和大氣阻力攝動條件下的衛星相對運動模型。
在某些空間任務中,可能需要衛星集群從當前位置快速運動到指定的目標點。并且在運動過程中既要保證星群的完整性,還要保證成員衛星之間不發生碰撞。針對上述空間任務,首先需要對星群的運動軌跡進行快速規劃。形狀曲線逼近法是一種簡單的軌跡規劃方法,能夠快速地規劃出有約束連續推力條件下衛星的轉移軌跡。文獻[14]以時間作為自變量,提出了一種基于解析形狀曲線的逼近方法,并利用該方法規劃了小推力航天器軌道轉移和軌道交會的安全軌跡。為增強對運動軌跡的擬合能力,文獻[15]采用傅里葉級數作為形狀曲線,實現了航天器三維運動軌跡的快速設計。雖然形狀曲線逼近法只能對衛星運動軌跡進行初步的規劃,但由于星群不需要精確的空間構型,所以該方法適用于星群運動軌跡的快速規劃。
蜂擁控制是一種基于仿生學的分布式控制策略,經常應用于群體運動控制中。文獻[20]采用分散的蜂擁控制策略實現了二階多智能體系統通信連通性的保持。考慮系統收斂的速度,文獻[21]利用非光滑理論和固定時間穩定理論設計了蜂擁控制器,使系統在固定時間內形成穩定的集群運動。然而在實際中,通信延遲是不可避免的。針對此問題,文獻[22-24]在考慮時變通信延遲的前提下設計了一種蜂擁控制器,并證明當通信延遲滿足一定的約束時,系統依然能夠到達穩定。
在傳統的蜂擁控制中,通常認為集群中的成員能夠與其通信范圍內的所有鄰居成員互相通信。但對于衛星集群,成員衛星的通信鏈路可能存在上限,即一個衛星只能與其通信范圍內固定數量的衛星進行通信。針對這個問題,采用度約束生成樹作為通信拓撲是一種合理的解決方法。然而,以生成樹為通信拓撲雖然能減少每顆衛星的通信鏈路,但是對兩顆不直接相連的衛星,通信延遲可能會隨著通信跳數的增加而增加。因此,還需要對生成樹的半徑或直徑進行約束。
綜合前文所述,本文針對衛星集群的協同運動問題,首先利用Prim算法和廣度優先算法設計了一種度、半徑約束生成樹的計算方法,并將優化后的結果作為星群的通信拓撲。另一方面,利用基于傅里葉級數的形狀曲線逼近法對主星參考軌跡進行快速規劃。基于得到的通信拓撲與參考軌跡,設計了改進的蜂擁控制器,并給出了相應的穩定性證明。
1 相關基礎
1.1 相對運動動力學模型
航天器相對運動方程用于描述軌道上兩顆近距離飛行的航天器之間的相對運動。為描述問題方便,一般將其中一個航天器稱作主星,另一個航天器稱作從星。
建立衛星集群相對運動模型時,常采用地心慣性坐標系(ECI)與當地水平當地垂直坐標系(LVLH)。其中,地心慣性坐標系的坐標原點位于地心,軸位于赤道平面內,指向春分點,軸指向地球北極,軸位于赤道平面內,與軸垂直,且與,軸構成笛卡兒直角坐標系。對于LVLH坐標系,其原點位于主星的質心,軸方向由地球質心沿徑向指向主星,軸垂直主星軌道面并指向軌道角動量方向,軸與另外兩軸垂直并構成右手直角坐標系。ECI坐標系與LVLH坐標系如圖1所示。
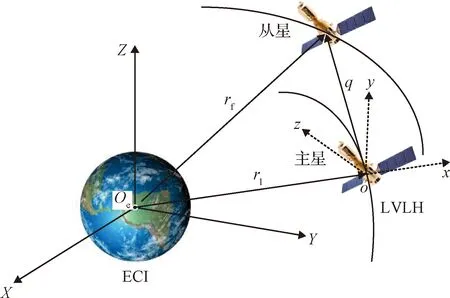
圖1 ECI與LVLH坐標系Fig.1 ECI and LVLH coordinate systems

由于衛星的相對運動會受到各種空間擾動的影響,本文考慮項攝動,大氣阻力和第三體引力攝動。首先,中心質點引力和項攝動的引力勢函數表達式為:

(1)
式中:為引力常數;為二階帶諧項系數;為地球的平均半徑;為衛星在ECI坐標系下位置矢量的模;為衛星所處的地理緯度。
大氣阻力也是一種不可忽視的空間擾動,衛星受大氣阻力而產生的加速度表達式如下:
(2)
式中:為大氣阻力系數;為衛星有效迎風面積;為衛星質量;為大氣密度;為衛星相對于大氣的速度,可由下式求得:
(3)
式中:為衛星在地心慣性坐標系下的位置矢量,為地球自轉角速度,方向是沿軸正方向,大小為7.29211515×10rad·s。
第三體引力攝動是指影響衛星的攝動來自第三個天體的牛頓引力,而對于地球衛星來說,第三體引力攝動來自于日、月引力。太陽和月球引力產生的加速度的計算公式如下:

(4)
式中:和分別是太陽和月球的引力常量;和分別為衛星指向太陽和月球的矢量,和為對應矢量的模;和分別是地球指向太陽和月球的矢量,和為對應矢量的模。

(5)
式中:=32;為衛星的徑向速度。

(6)
式中:,和為衛星在LVLH坐標系下三個坐標軸方向上的推力,其他參數如下:
(7)
1.2 圖論
衛星集群的網絡拓撲可以采用圖論來描述,當星群中衛星能夠雙向通信時,采用無向圖進行拓撲建模。因此,衛星集群通信拓撲可以看成是由個節點和條邊構成的無向圖=(V, E),其中節點集為V={,,…,},邊集E={,,…,}表示衛星之間的通信鏈路。若是無向圖中連接頂點,的邊,則稱和為的兩個端點,稱頂點,相互鄰接,所有與頂點相關聯的邊數稱為頂點的度,記為()。無向圖的度矩陣可用一個對角陣表示,記為=diag((),(),…,())。用表示頂點與之間的連接關系,若頂點與之間存在邊則=1,否則=0,=[]∈×定義為無向圖的鄰接矩陣。若無向圖無環,則矩陣中第行(列)的元素之和等于頂點的度數。顯然鄰接矩陣是一個對稱矩陣,同時也是一個非負矩陣。
1.3 問題描述
本文的主要研究內容是考慮通信延遲的衛星集群的群體運動控制策略。考慮由式(6)描述的衛星集群,假設星群中只有一顆主星,星群在初始時刻的通信網絡是連通的,并且星群中的衛星能夠通過通信鏈路傳遞信息,則設計星群運動策略如下:
(1)在初始時刻,結合Prim算法和廣度優先算法計算當前通信拓撲的度、半徑約束最小生成樹,并作為星群的通信拓撲。
(2)主星采用基于傅里葉級數的形狀曲線逼近法快速生成滿足任務需求的主星參考軌跡,并將參考軌跡的信息傳給星群中的其他從星。
(3)基于規劃出的參考軌跡設計改進的蜂擁控制器,實現主星對參考軌跡的快速跟蹤,同時使從星能夠根據通信連接關系保持合適的相對距離,并且在不發生碰撞的前提下維持通信拓撲的連通性。最終,所有衛星的速度最終與參考速度一致,即形成穩定的蜂擁運動。
2 星群控制策略
2.1 星群通信拓撲生成算法
考慮星群中的衛星裝載簡單的通信設備,單顆衛星上的通信鏈路存在上限。因此,即使在通信范圍內還有其他衛星,任何衛星在同一時間也只能與固定數量的鄰居衛星通信。對于衛星集群的通信拓撲,上述問題意味著每個通信節點的度有上界。另外,若任何兩個節點之間都存在通信延遲,則通信延遲將會隨著通信跳數的增加而增加。為保證拓撲連通性,并且能節省部分通信資源,本文采用度、半徑約束最小生成樹作為星群通信拓撲。
假設衛星集群衛星的初始通信拓撲為無向圖=(V, E)。其中,在節點集合V中,定義為根節點。定義邊權矩陣={|(,)∈E},其中,表示第個衛星與第個衛星之間的相對距離與期望距離的差值。對于節點,定義節點度約束()。設是無向圖的一棵樹,()是一條從根節點到的路徑,而(())為這條路徑上的邊數。定義樹的半徑為()=max(()),為半徑的約束值。定義()為生成樹所有的邊權值得總和,則無向圖的度、半徑約束最小生成樹算法表示如下:
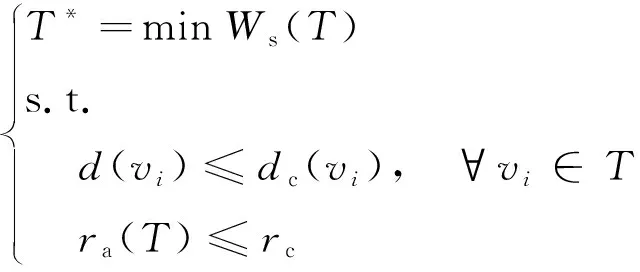
(8)
算法的核心思想是,根據任務要求選擇一顆衛星作為根節點,再利用Prim算法和廣度優先算法在度約束下不斷擴展其他節點,直到得到最優生成樹。算法的具體步驟如下:
1) 定義一個根節點集合={}和一個候選節點集合。選擇一個根節點,定義剩余度標記為()=(),定義當前節點與根節點的跳數為()=0,定義生成樹的邊集。
2) 從邊集E中篩選出與根節點相連接的邊,并將這些邊按權值從小到大排列放入集合中。
3) 從集合中的第一條邊開始搜索連接的節點,滿足()>0和()≤,其中()←()+1。然后,將(,)存入集合。
4) 將滿足約束的節點加入到集合中,并更新與的剩余度標號,即()←()-1和()←()-1。
5) 判斷集合中節點的剩余度標號,若()=0,則將節點從集合中刪除。
6) 判斷集合中的邊數,若邊數小于-1,則返回2)。若邊數等于-1,則集合中的邊即為無向圖的度、半徑約束最小生成樹。
將計算得到的度、半徑約束最小生成樹作為衛星集群通信拓撲,能夠在滿足通信約束的條件下,用最少的通信鏈路保證通信拓撲的連通性,并實現邊權值最優,能夠為控制器提高收斂的速度,從而在一定程度上減少燃料消耗。
2.2 衛星集群參考軌跡設計
由于星群對具體空間構型的要求并不嚴格,且衛星之間只需要保持在通信范圍內就可以正常工作。因此,相對于計算量大的精確軌跡規劃,在任務初始階段對主星進行簡單快速的軌跡規劃更適合星群的群體運動。

(9)
式中:表示主星運動的時間;,和為傅里葉級數的階次;,,,2-1,2-1,2-1,2,2和2為傅里葉級數的系數。對式(9)關于時間求一階導數可得

(10)
對式(9)關于時間求二階導數可得
(11)
傅里葉級數中的系數確定以后,將式(9-11)代入式(6)能夠計算出衛星三軸方向上的推力值。假設,衛星推進器能提供的最大推力值為,則推力約束方程為:

(12)
當主星初始狀態(位置、速度)、末端狀態和運動時間已知的情況下,能夠確定12個約束方程。同時,為了保證擬合曲線的精度,傅里葉級數階次的取值不能太小,但取值過大也會增加計算的復雜程度,并且對精度的提升不大,因此一般選取的階次為大于等于3。這將使約束方程的個數少于未知系數,所以將未知系數分成兩個部分,其中一部分由約束方程直接求得,具體表達式如下:
(13)
式中:,和為衛星的初始位置坐標;,和為衛星的末端位置坐標;另一部分系數由優化算法求得。本文以燃料消耗作為優化指標,具體形式為:
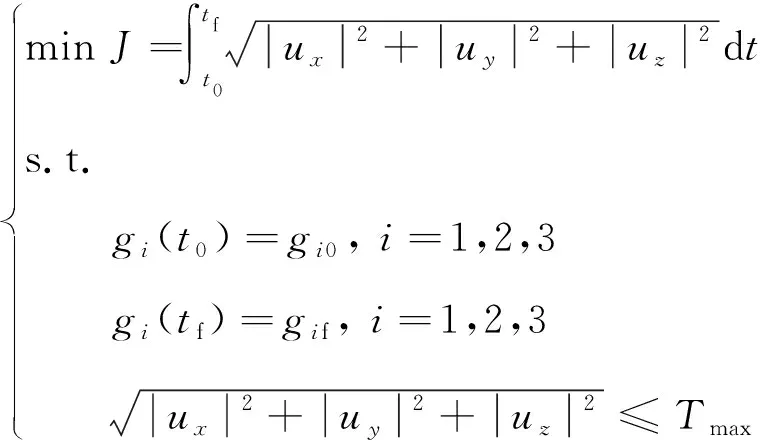
(14)
式中:()表示主星在時刻的狀態;0和f為邊界條件;表示三個坐標方向。本文采用序列二次規劃(SQP)算法,根據待優化的性能指標求解滿足約束條件的優化解,即為傅里葉級數的全部系數,進而得主星在推力約束下的優化軌跡,將該軌跡作為主星的參考軌跡,用于后續的控制器設計。
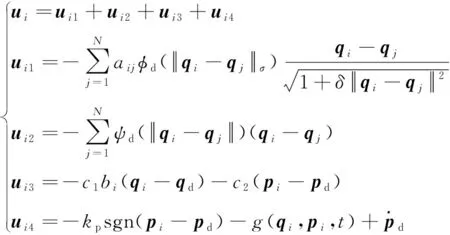
2.3 考慮通信延遲的改進蜂擁控制器設計
在前文得到的優化拓撲和參考軌跡的基礎上設計改進蜂擁控制器,使主星跟蹤參考軌跡,且存在直接通信的衛星之間保持一個特定的期望通信距離,而其他衛星僅需要保證不發生碰撞即可。盡管星群沒有具體的空間構型,但依然能夠在不發生碰撞的前提下維持星群的通信連通性。
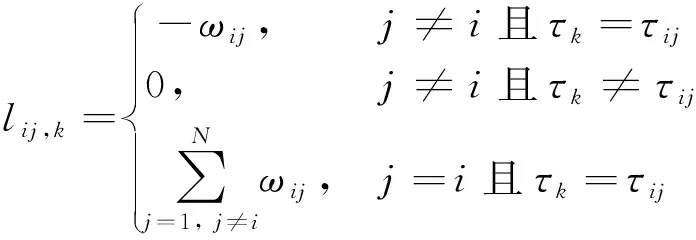
假設,衛星集群由1顆虛擬參考衛星與顆質量均為的真實衛星構成。衛星之間能夠通過無線通信實現信息的傳遞,不直接通信的衛星,也可以通過通信鏈路獲取彼此的狀態信息。然而通信延遲普遍存在于衛星網絡中,針對此問題,本文考慮任意兩顆直接通信的衛星之間的通信延遲相同,以()表示,不直接通信的衛星之間的通信延遲為最短通信鏈路上所有延遲的總和。


(15)

(16)
在1中,為星群通信拓撲鄰接矩陣的元素;為正數;為蜂擁控制的勢函數,其表達式為:
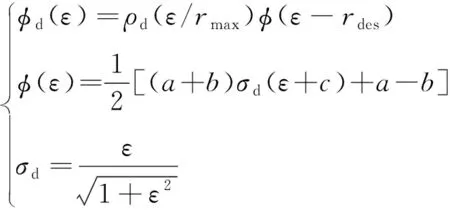
(17)


(18)
式中:∈(0, 1)。顯然,1的作用只存在于直接通信的衛星,并且會使直接通信的衛星間距離趨向于期望距離。
由于不直接通信的衛星之間可能會發生碰撞,因此設計了2,若任意兩顆衛星之間通過通信鏈路可以得知彼此的運動狀態,則實現碰撞規避,2采用人工勢場法,()表達式如下
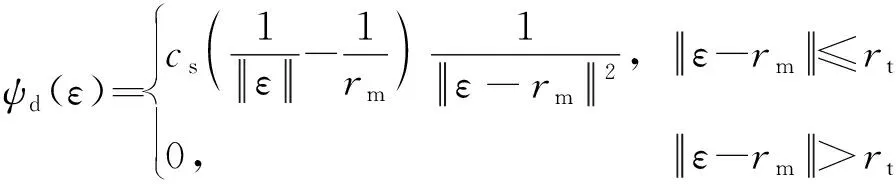
(19)
式中:為增益系數;為安全距離;為人工勢場的作用距離。
在3中,和為控制增益,定義為主星標號,若第顆衛星為主星時=1,否則=0。這意味著只有主星跟蹤參考軌跡,而其他的衛星只跟蹤參考速度使星群實現速度一致。最后在4中,為正數,實現對未建模擾動的補償。
定義(),()和()分別是在控制器作用下第顆、第顆衛星和參考衛星在時刻的期望位置,則當→∞時有

(20)
因此,控制器可以表示為:


(--(-))-(-)-

(21)
令


(22)

(23)
并且,定義第顆衛星與第顆衛星之間的通信延遲為(),則控制器可以表示為

())]-(()-())-(()-

(24)
將衛星之間的通信延遲定義成一個集合(),其表達式如下
()∈{():,=1,2,…,},=1,2,…,
(25)

(26)
將星群控制器寫成如下的矩陣形式:



(27)
式中:?表示克羅內克積;為階方陣,且對角線上主星對應序號的元素為1,其余元素為0;為階單位陣;×為包含×個元素的列向量,其中,=3,且每個元素均為1。根據式(15)和參考軌跡的差值,可得系統的誤差模型如下:

(28)


(29)
式中:
(30)
假設對稱矩陣可分解為:
(31)

定義函數:([-,0],)→,且滿足如下微分方程
(32)
式中:()=(+), ?∈[-,0],且(0)=0。定義連續非減函數(),()和(),當>0時,有()>0,()>0,()>0。并且,(0)=0,(0)=0,當→∞時,()→∞。若存在一個連續的函數(,):×→,一個連續非減的函數():→,當>0,()>,和一個常數,使得
(1)(==)≤(,)≤(==),∈,∈。

則微分方程(32)的零解是一致有界的,而當=0時,該零解是一致漸近穩定的。
考慮衛星集群包含顆衛星,其相對運動模型如式(15),若存在控制增益,使得

(33)
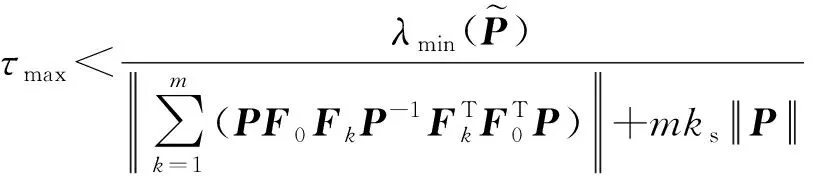
并且通信延遲=max(())滿足

(34)
式中:(·)表示矩陣的最小特征值;>1;其他參數為
(35)
則,誤差系統(29)是穩定的。
定義李雅普諾夫函數如下:

(36)
顯然,

(37)
對李亞普法諾夫函數()求導可得

(38)
根據式(29)可得

(39)
式中:
(40)
將式(39)代入式(38)可得


(41)

(42)
另外,根據引理2,令()=,>1,可得






(43)
代入式(42)和(43),式(41)可化簡為:


(44)


(45)

(46)
可得
(47)
根據引理2可知

(48)
因此,在改進蜂擁控制器的作用下,星群中的主星能夠跟蹤參考軌跡,所有衛星能夠根據通信拓撲的連接關系維持期望的通信距離且不發生碰撞。最終,星群中衛星的速度將趨于參考速度,形成穩定的蜂擁運動。
3 仿真校驗
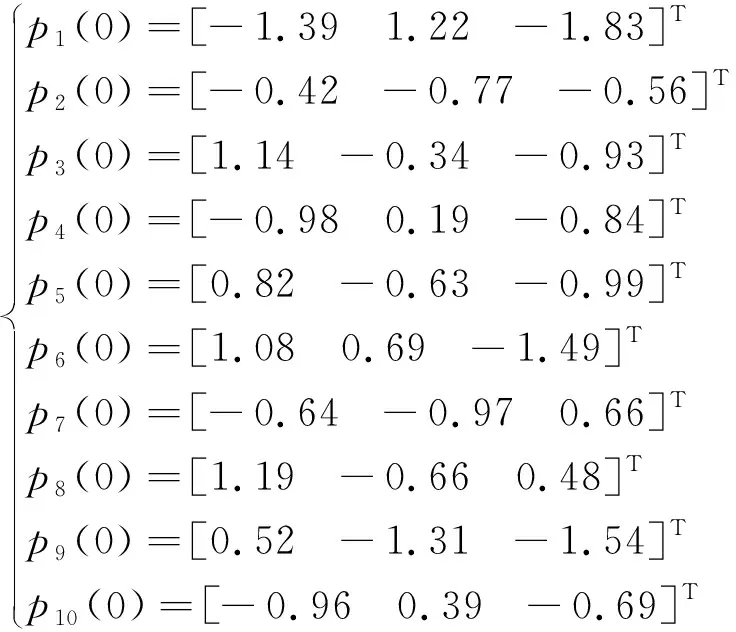
本文以10顆衛星組成的衛星集群為例,虛擬的參考衛星軌道根數為=687814 km,=005,=π6, Ω=π3,=π6,=π4。下文中,集群衛星位置矢量的單位為m,速度矢量的單位為m·s,集群中主星的期望位置矢量為=[200 200200],期望速度矢量為=[000]。集群中衛星的初始位置矢量如下:
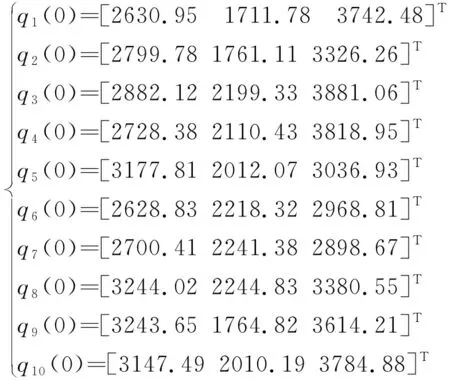
(49)
集群中衛星的初始速度矢量如下:
(50)



圖2 優化后的通信拓撲Fig.2 Optimized communication topology
從圖2中可以看出,每顆衛星均與不超過3顆衛星互相通信,每顆衛星與主星衛星的通信距離不超過3跳。此外,根據優化算法的原理,直接通信的衛星間距在優化之后更接近期望的通信距離,這可以在一定程度上減少控制距離和穩定時間,從而減少燃料消耗。
進而,利用基于傅里葉級數的形狀曲線逼近法取===4,推力約束為1 N的條件下,根據主星的初始狀態、期望狀態以及運動時間對主星的運動軌跡進行規劃,傅里葉級數的系數如下:

式中:=1,2,…,9。同時,在改進蜂擁控制器的作用下,主星將跟蹤規劃的參考軌跡,從星跟隨主星運動,如圖3所示。主星與參考軌跡之間的位置誤差如圖4所示。

圖3 衛星集群運動軌跡Fig.3 Trajectories of the satellite cluster

圖4 主星的位置誤差Fig.4 Position errors of the leader satellite
在圖3中可以看出,星群能夠沿著參考軌跡實現穩定的群體運動,并且在運動過程中始終保持優化的通信拓撲。根據圖4中的主星位置誤差曲線,可以看出在控制器的作用下,主星跟蹤參考軌跡的位置誤差小于0.2 m,這說明主星能夠精確地跟蹤所設計的參考軌跡。
由控制器的形式可知,星群通信拓撲中存在直接通信的衛星之間將保持期望通信距離400 m,并且在整個運動過程中,任意兩顆衛星將保持在安全距離以外,而星群中所有衛星的速度將會趨于一致,并收斂到期望的速度。星群中直接通信的衛星之間的相對距離如圖5所示,所有衛星之間的相對距離如圖6所示。
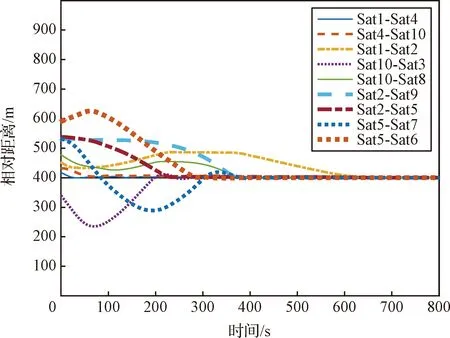
圖5 直接通信衛星之間的相對距離Fig.5 Relative distance between satellites with direct communication

圖6 集群衛星之間的相對距離Fig.6 Relative distance between satellites in a cluster
從圖5中可以看出,直接通信的衛星之間的距離能夠快速收斂,并在640 s時到達穩定,最終的跟蹤誤差小于0.4 m。而在圖6中能夠發現,星群中的衛星在整個的運動過程中,星間距離始終保持在安全距離之外。雖然在初始時刻存在衛星間距小于安全距離的情況,但是在控制器的作用下,衛星彼此快速分離,滿足碰撞規避的要求。
另外,所有衛星的相對速度將在運動中趨于一致,并且最終收斂到參考軌跡的速度。星群衛星與參考軌跡的速度跟蹤誤差如圖7所示。從圖7中的誤差曲線可以看出,當直接相連的衛星收斂于期望距離后,衛星的速度也開始收斂于參考速度,最后達到0.02 m/s的控制精度。值得注意的是,相對速度趨于一致是保證星群整體穩定運動的關鍵。
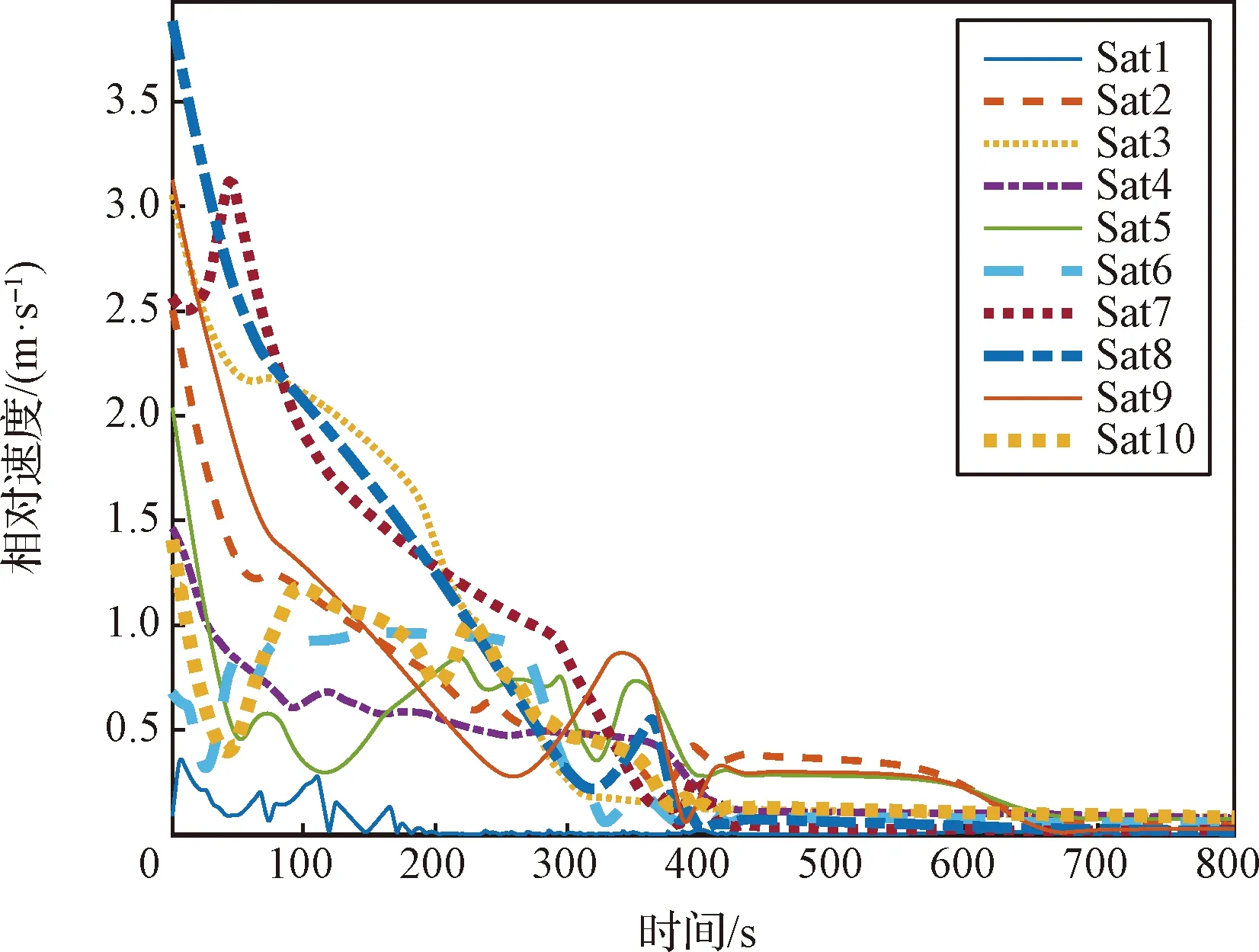
圖7 星群中每顆衛星的速度誤差Fig.7 Velocity errors of each satellite in a cluster
4 結 論
本文提出了一種改進的蜂擁衛星集群控制策略。為了得到滿足通信約束的星群通信拓撲,利用基于Prim算法和廣度優先算法計算出星群通信網絡的度、半徑約束生成樹。進而,根據任務需求采用基于傅里葉級數的形狀曲線逼近法對主星的參考運動軌跡進行了快速規劃。最后,考慮衛星間通信時延、多擾動和推力約束,設計了結合傳統蜂擁控制與人工勢場法的改進蜂擁控制器,實現星群的無碰撞群體運動。數值仿真表明,本文設計的控制策略能夠在滿足各種約束的前提下,使星群以較高的控制精度快速安全地跟蹤參考軌跡,從而保證空間任務的順利實施。