帶落速落角約束的高超聲速飛行器俯沖軌跡規劃方法
2022-09-23 06:18:26梁子璇黃美伊冉宇寰朱圣英
宇航學報 2022年8期
關鍵詞:規劃
梁子璇,黃美伊,冉宇寰,朱圣英
(1. 北京理工大學深空探測技術研究所,北京 100081;2. 深空自主導航與控制工信部重點實驗室,北京 100081)
0 引 言
高超聲速飛行器憑借其飛行速度高、飛行空域廣、突防能力強的特點,已經成為近年來航空航天領域的研究熱點。按軌跡/彈道特點的不同,高超聲速飛行器通常可以分為滑翔式與巡航式。對于兩類飛行器,俯沖段的精確制導都是完成打擊任務的關鍵。在未來復雜多變的作戰環境下,離線設計的俯沖軌跡適應性較差,無法保證俯沖段的打擊效果。因此,針對多約束條件下高超聲速飛行器俯沖段,亟需發展具備在線軌跡規劃能力的制導技術。
作為打擊任務的最末段,俯沖段要求飛行器在有限的氣動力控制下完成待飛航程,并且準確命中目標點。同時,為了保證對目標的打擊效果,俯沖段軌跡還需滿足一定的落角和落速約束。對于飛行速度高、控制能力弱的高超聲速飛行器,復雜的約束使得俯沖段制導問題極具挑戰。針對高超聲速飛行器的俯沖段制導問題,現有研究多側重于落角約束的滿足。Lu等設計了一種比例導引參數自適應調整的末制導律,可實現飛行器以固定落角命中目標;在此基礎上,李惠峰等通過對制導參數進行自適應調整,提升了落點與落角控制精度。考慮俯沖段的機動突防需求,文獻[8]和[9]分別基于正弦視線角曲線和螺旋機動軌跡設計了制導方法,在保證落角約束的同時,兼顧了飛行器的突防性能。針對初始條件和氣動參數等擾動,文獻[10]和[11]基于滑模控制理論設計了俯沖段制導方法,提升了擾動條件下的制導精度。考慮飛行器的姿態動力學,文獻[12-14]通過建立分通道模型、低階非線性系統模型等方法,簡化了六自由度制導控制系統的設計過程,并提出了具有魯棒性的制導控制一體化方法。以上方法雖然實現了較好的落角控制,但并未考慮落速約束,使得終端速度散布較大,一定程度上將影響高超聲速飛行器的打擊效果。
對于高超聲速飛行器而言,考慮到彈頭結構約束和戰斗部最佳毀傷效果,一般存在最優終端速度或速度區間。為實現最優落速的控制,可以在俯沖段軌跡規劃中同時考慮落速與落角約束。針對帶落速下限約束的軌跡規劃問題,徐明亮等采用高斯偽譜法對俯沖段軌跡進行了優化;楊良等分析了高斯偽譜法的節點選取對軌跡優化精度及效率的影響,為提升高斯偽譜法的計算效率提供了依據。此外,針對以落速最大為目標函數的軌跡優化問題,文獻[17]和[18]分別利用凸優化方法與深度神經網絡學習理論進行了求解。這些方法主要將落速考慮為不等式約束或優化指標,能夠得到期望的俯沖軌跡,但優化問題的求解耗時較長,難以滿足在線規劃需求。孫未蒙等在落角約束的基礎上,結合自適應梯度下降法與模糊模型對落速進行了補償控制,能夠在一定程度上調節飛行速度,但無法精確控制落速。
本文針對高超聲速飛行器俯沖段軌跡規劃問題,同時考慮落速與落角約束,提出一種快速軌跡規劃方法。首先,建立了兩段式軌跡規劃策略,將飛行過程分為速度調節段與落角控制段。前段引入參數化的控制剖面,使飛行器具有速度調節能力;后者則采用傳統的偏置比例導引律,以滿足落角約束。在此基礎上,為實現落速精確控制并提升規劃效率,將控制剖面的參數選取分解為離線多參數優化與在線單參數搜索兩部分依次設計。最后,對所提出的軌跡規劃方法進行了仿真,驗證了其實時性、魯棒性和任務適應性。
1 動力學及約束模型
在俯沖段,飛行器的機動主要體現在縱向平面內,因此本文僅考慮縱向平面內的軌跡規劃問題。以俯沖段飛行器質心初始位置在地面上的投影點為原點建立地面固聯坐標系,其中軸由原點指向俯沖段目標點,軸由原點指向飛行器質心初始位置。定義飛行器狀態變量
=[,,,]
(1)
式中:為航程,表示飛行器質心在軸上的坐標;為高度,表示飛行器質心在軸上的坐標;為速度大小;為彈道傾角。
飛行器動力學模型為

(2)
式中:,分別為飛行器受到的氣動升力、阻力;為飛行器質量,由于俯沖段為無動力(推力)飛行,為常數;為重力加速度。
對于俯沖段軌跡規劃問題,飛行器狀態變量受到的終端約束為

(3)
式中:為俯沖段終端時刻,一般不做約束;,,,分別為期望的終端航程、高度、速度與彈道傾角。一般以終端高度() =作為俯沖段終止條件。
考慮到飛行器控制能力限制,攻角在飛行過程中受到如下約束
(4)

此外,考慮到結構安全,飛行器過載受到如下約束
||≤
(5)
式中:為過載最大值。
2 軌跡規劃方法
2.1 兩段式軌跡規劃策略
針對帶有落速與落角約束的高超聲速飛行器俯沖軌跡規劃問題,采用兩段式規劃策略:第一段為速度調節段,通過調整參數化控制剖面改變飛行速度,進而控制落速;第二段為落角控制段,采用帶落角約束的導引律實現落角與落點控制。在該策略下,攻角指令可以寫為
(6)
式中:為時間,以進入俯沖段為起點;為速度調節段與落角控制段的切換時刻;()為參數化的攻角剖面曲線,對應速度調節段;()為落角控制段的攻角指令,可由法向加速度反解得到。
帶落角約束的導引律有多種形式,本文采用文獻[19]設計的偏置比例導引律,其基本思想是在比例導引律的基礎上增加落角偏差的修正項,并根據待飛時間進行加權,相應的法向加速度為

(7)
式中:為比例系數;為目標視線角;為待飛時間,近似計算公式為

(8)
需要注意,本文研究的俯沖段軌跡不考慮終端時間約束,因此,采用式(8)給出的近似公式即可滿足落點與落角控制需求。
為滿足過載約束,攻角指令還需進行如下處理:
(9)

2.2 參數化控制剖面設計
為減少設計參數,將速度調節段的攻角曲線()設計為“常值-斜坡-常值”形式的參數化控制剖面,如圖1所示。攻角在[0,]內為常值,在(,]內為斜坡,在(,]內為常值,表達式為
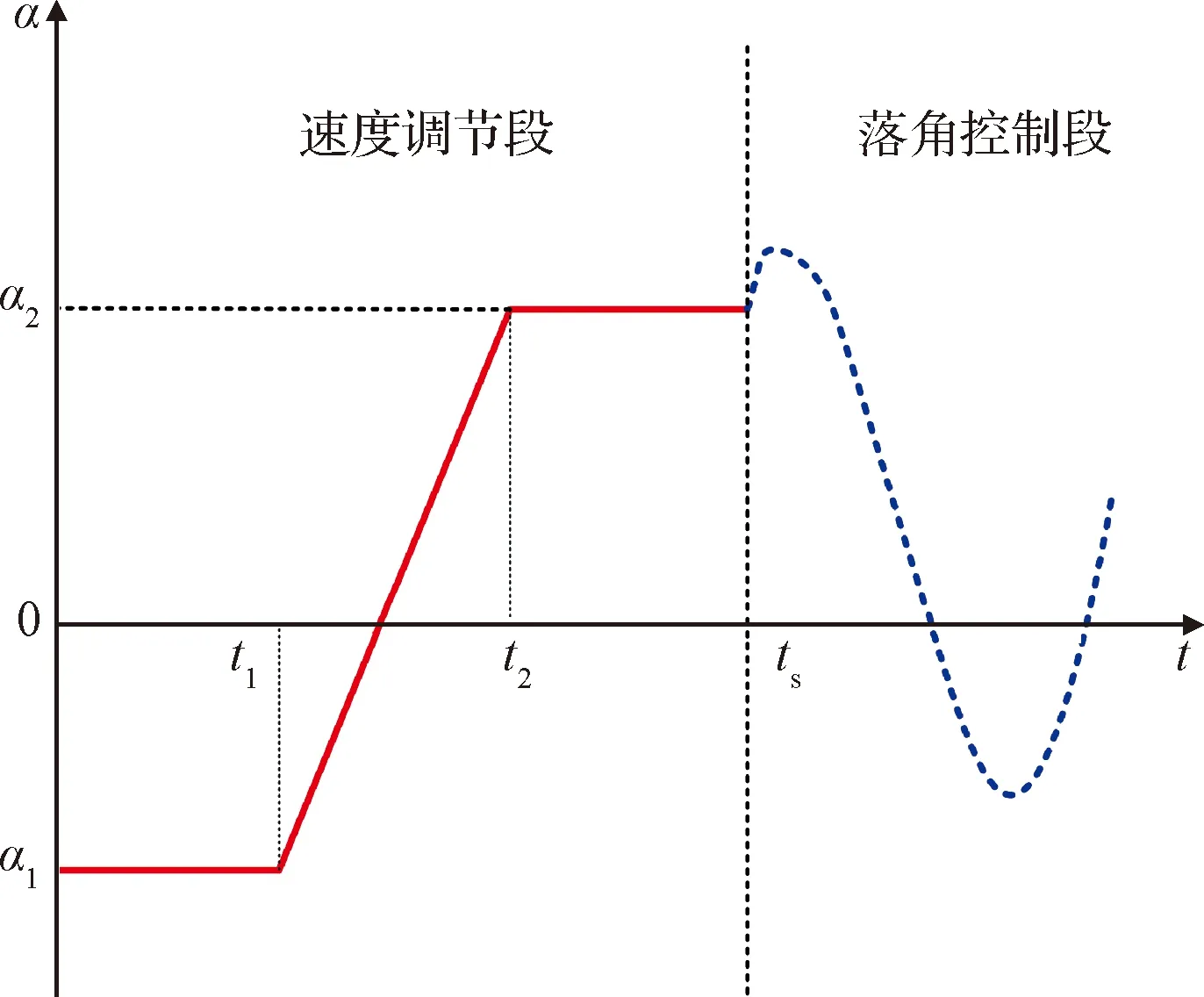
圖1 參數化攻角剖面Fig.1 Parameterized angle of attack profile
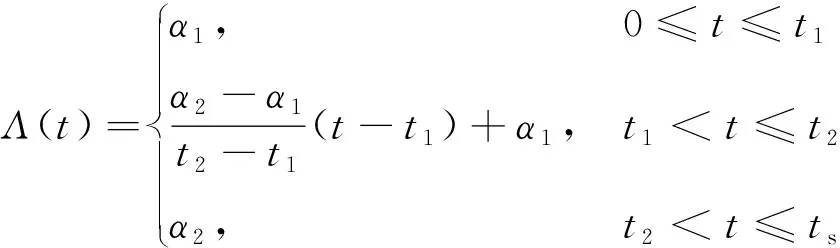
(10)
式中:與為攻角參數,且一正一負;,,為時間參數。這樣,通過調節時間參數與可以改變正、負攻角持續時間的比例,進而影響飛行軌跡與速度。
進入落角控制段后,偏置比例導引律將首先采用正攻角以滿足垂直打擊的落角約束。因此,為避免兩段切換時攻角的劇烈變化,采用“負常值-斜坡-正常值”攻角剖面曲線,即<0,>0。
進一步,為滿足式(4)中的攻角約束,將式(10)中(,]內的斜坡進行圓弧光滑處理,得到光滑的攻角剖面曲線
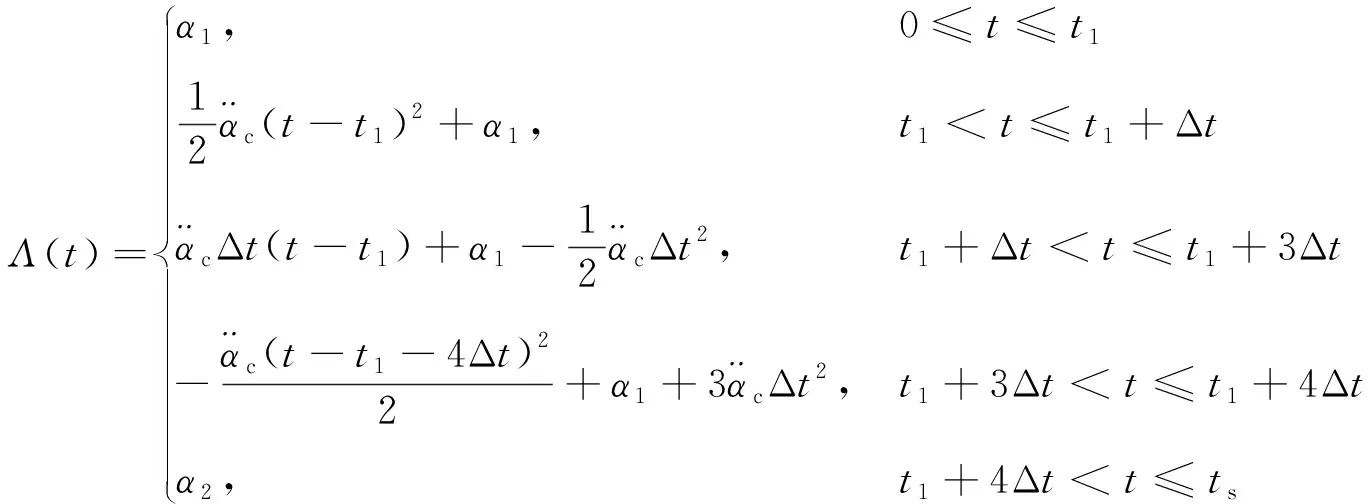
(11)
=+4Δ
(12)
式中:
(13)
于是,控制剖面設計轉化為攻角參數,與時間參數,的確定。俯沖段軌跡規劃時,一方面要具備較快的求解速度,以滿足在線規劃的實時性需求;另一方面,需對初始條件具有較好的魯棒性,即應盡可能適應更大范圍的初始擾動。綜合以上兩點考慮,控制剖面的參數確定方案如下:
1) 離線優化攻角參數,與時間參數。定義可行初始位置,并以其范圍大小作為優化指標,通過求解優化問題確定參數,與。
2)在線搜索時間參數。在確定離線參數,,的基礎上,通過求解單參數搜索問題確定滿足各項約束的參數及相應的俯沖軌跡。
需要指出,俯沖段初始條件涉及與初始位置相關的高度和航程,也涉及到速度和彈道傾角等其他狀態量。為簡化設計,本文用可行初始位置范圍的大小近似表征攻角剖面對初始狀態擾動的適應能力。由于各初始狀態量對俯沖軌跡的影響是耦合的,根據初始位置擾動適應能力設計出的攻角剖面也將對速度、彈道傾角等其他狀態量的擾動具有一定的魯棒性。
2.3 離線多參數優化
定義可行初始位置:對于某一組待優化參數,與,若存在時間參數,使得相應控制剖面下的俯沖軌跡能夠滿足各項約束,則該軌跡的初始點位置即為可行初始位置。進一步,以標稱情況下初始點為基準點的四邊形面積近似表征可行初始位置范圍的大小,如圖2所示。,,,分別表示從點開始,沿軸正向、軸負向、軸正向、軸負向的最遠可行初始位置。
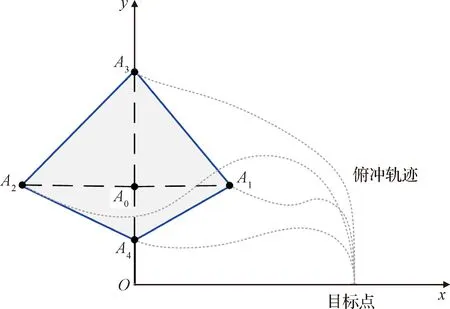
圖2 俯沖段可行初始位置范圍示意圖Fig.2 Diagram of feasible zone for initial position of diving phase
設四邊形面積為,建立優化目標函數

||)(||+||)
(14)
以函數式(14)為優化目標,以動力學模型式(2)、攻角約束式(4)、過載約束式(5)為過程約束,結合終端狀態約束式(3),共同構成了攻角參數,與時間參數的優化問題如下
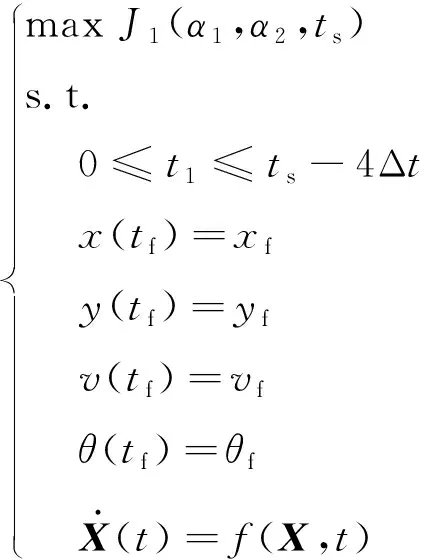
(15)

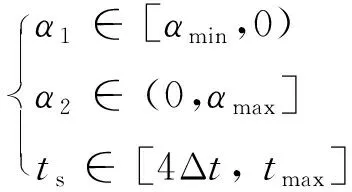
(16)
式中:為俯沖段時間上邊界,可取= (-)/。
2.4 在線單參數搜索
需要注意,時間參數除影響落速之外,還可能影響俯沖段的落點與落角。當取值過大時,飛行器速度損失嚴重以致無法到達目標點,即產生較大的負向落點偏差,并伴隨落角偏差;取值過小時,飛行器會因速度過高而落點超過目標點,即產生較大的正向落點偏差,并伴隨落角偏差。因此,只有當在合理區間內取值時,偏置比例導引律才能保證落點與落角的控制精度。于是,單參數搜索問題可以描述為:搜索使得落速偏差最小,且落點和落角偏差為零(或可接受),數學表達式如下:
(17)
事實上,在偏置比例導引律作用下,落點和落角約束同時滿足或不滿足,且俯沖段對落角的容忍偏差相對更大。因此,搜索時只需保證落點約束即可。落速偏差Δ與落點偏差Δ隨的變化關系如圖3所示。圖中,為速度偏差曲線的零點,[,]為落點偏差為零的區間。因此,優化問題(17)的解為
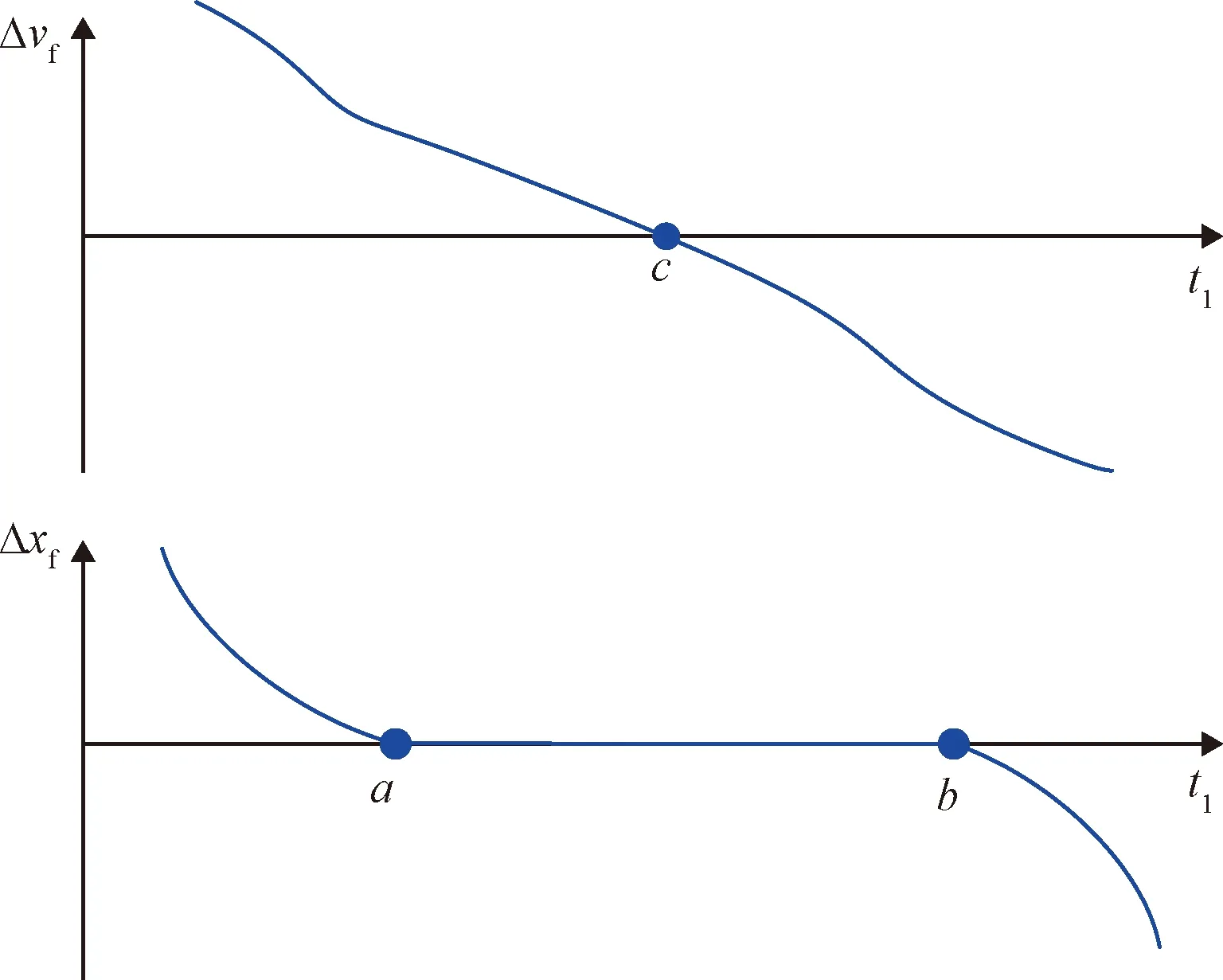
圖3 落速與落點偏差隨t1的變化曲線Fig.3 Terminal velocity and position errors changed with t1
(18)
由于無法獲得Δ()與Δ()的解析函數,故式(18)中的,,無法直接得到。為求解帶約束的單參數搜索問題,引入關于落點偏差的罰函數

(19)
式中:為落點偏差可接受范圍;為罰因子。為優先保證落點約束的滿足,罰因子設計如下
=max{-,-0}
(20)
式中:為飛行器速度上邊界,可根據動能定理近似計算

(21)
引入罰函數后得到新的優化目標函數
()=|()-|+(Δ,)
(22)
該單參數優化問題可通過割線法求解,迭代過程如下

(23)


需要注意,當式(22)存在零點時,可以得到滿足落速、落點、落角約束的俯沖軌跡;當不存在零點時,則得到次優解,即落速偏差最小且滿足落點與落角約束的俯沖軌跡。
3 仿真分析
在PC機(CPU:2.9 GHz)的Matlab環境下,對高超聲速飛行器俯沖軌跡規劃方法進行仿真校驗。飛行器氣動參數參考文獻[20],標稱情況下,俯沖段初始與終端條件見表1。

表1 標稱初始與終端條件Table 1 Nominal initial and terminal conditions

3.1 標稱情況仿真

圖4 俯沖段可行初始位置范圍Fig.4 Feasible zone for initial position of diving phase
得到離線優化的參數后,對時間參數進行快速搜索,得到標稱情況下的多約束俯沖軌跡,如圖5所示。飛行器準確地命中了目標點,終端位置偏差為0.15 m;通過調整飛行高度,實現了垂直俯沖的落角控制,落角(終端彈道傾角)為-89.80°。飛行器的速度曲線如圖6所示,落速為900.09 m/s,實現了對落速的精確控制。
圖5 標稱情況俯沖軌跡Fig.5 Diving trajectory in nominal case

圖6 標稱情況速度曲線Fig.6 Velocity in nominal case

圖7 標稱情況攻角與過載曲線Fig.7 Angle of attack and overload in nominal case
3.2 擾動情況仿真
實際任務中,飛行器進入俯沖段時位置和速度均可能存在偏差。假設俯沖段初始高度、速度、航程、彈道傾角均服從正態分布,且三倍標準差分別為3 km、 100 m/s、 30 km、 2°。采用蒙特卡洛方法對擾動情況下的軌跡規劃方法進行仿真。仿真次數設定為500,規劃得到的俯沖軌跡如圖8所示。不難看出,在較大的初始狀態散布下,飛行器均能通過調整俯沖軌跡實現目標點的精確命中,最大落點偏差為0.22 m。圖9給出了俯沖軌跡的落速-落角散布情況,落速偏差在± 3 m/s以內,落角偏差在±0.5°以內,均達到了較高的控制精度。圖10為飛行器的過載曲線,所有軌跡的最大過載均滿足不大于15 的約束限制。因此,蒙特卡洛仿真結果表明,所提出的軌跡規劃方法雖然在優化攻角剖面時僅考慮了初始位置的適應能力,但對初始位置和速度擾動均具有較好的魯棒性。
圖8 擾動情況俯沖軌跡Fig.8 Diving trajectories in dispersed cases
圖9 擾動情況落速-落角分布Fig.9 Terminal velocities and impact angles in dispersed cases
圖10 擾動情況軌跡過載曲線Fig.10 Overload for trajectories in dispersed cases
3.3 規劃效率分析
考慮在線使用需求,對所提出的軌跡規劃方法運算效率進行評估。蒙特卡洛仿真中,在線求解時間參數時,每條軌跡平均迭代1.67次,最大迭代5次;Matlab環境下,每條軌跡規劃平均耗時0.51 s,最大耗時為1.37 s。事實上,在C++環境下,軌跡規劃的耗時還可以大幅縮短。因此,統計結果表明,所提出的軌跡規劃方法求解效率高,具有在線使用的潛能。
3.4 可行初始位置范圍分析
攻角控制剖面的離線參數優化,旨在提升軌跡規劃方法對飛行器初始位置的適應能力,以可行初始位置的范圍大小作為優化目標,并以四邊形面積近似表征其大小。為驗證該表征方式的合理性,在標稱初始位置附近生成采樣點,依次判斷其作為初始位置的可行性,結果如圖11所示。可以看出,四邊形內的點均可行;四邊形外的左上方,由于初始高度越大(初始速度不變),能量越大,允許的初始航程也越小,故該方向上的實際可行范圍不是封閉的;四邊形外的其他方向,雖然實際可行范圍略大,但趨勢基本吻合。因此,結果表明,在優化攻角控制剖面的參數時,采用四邊形面積近似表征可行初始位置的范圍大小是合理的。
圖11 初始位置采樣評估結果Fig.11 Evaluation results for sampling points of initial position
3.5 任務適應性分析
本文所提出的軌跡規劃方法包括離線參數優化和在線參數搜索兩部分。當離線參數確定后,在線調整時間參數不僅能夠抑制初始擾動偏差,還能應用于不同落速與落角約束的飛行任務。圖12給出了落速約束分為800 m/s、900 m/s、1000 m/s所對應的俯沖軌跡,實際落速偏差不超過± 3 m/s。飛行器主要通過控制速度調節段來滿足落速約束,故三條軌跡在前半段呈現出較大差異。終端速度越小,速度調節段的負攻角時間越長,使得俯沖軌跡前半段的高度下降越多。由于落角約束不變,三條軌跡在后半段趨于重合。圖13給出了落角約束分別為-80°、-85°、-90°所對應的俯沖軌跡,實際落角偏差不超過± 0.2°。與圖12中的結果相反,三條俯沖軌跡前半段幾乎重合,而后半段區分度較強,這是由于落角約束主要通過落角控制段來滿足。綜上,仿真結果表明,所提出的軌跡規劃方法對不同落速與落角約束的飛行任務具有較好的適應性。
圖12 不同落速約束下的俯沖軌跡Fig.12 Diving trajectories with various terminal velocities
圖13 不同落角約束下的俯沖軌跡Fig.13 Diving trajectories with various impact angles
4 結 論
本文針對帶落速與落角約束的高超聲速飛行器俯沖段軌跡規劃問題,提出了一種“參數化控制剖面+偏置比例導引”的兩段式軌跡規劃方法。將控制剖面的參數設計分解為離線與在線兩部分:通過離線優化部分參數,提高了控制剖面對俯沖段初始狀態偏差的魯棒性;通過在線求解唯一的時間參數,提升了軌跡規劃效率。仿真結果表明,該方法能夠得到滿足落速與落角約束的俯沖段軌跡,對初始狀態偏差具有較好的魯棒性,并適用于不同落速與落角約束的飛行任務;同時,該方法求解俯沖軌跡時的迭代次數不超過5次,具備在線軌跡規劃能力。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41