車輛載重對行駛速度及車頭時距的影響分析
2022-09-27 10:34:52王亨琴
甘肅科技 2022年12期
王亨琴,李 政
(甘肅省交通科學研究院集團有限公司,甘肅 蘭州 730000)
隨著現代社會經濟的快速發展,車輛數量隨之迅速增多,汽車行駛速度及載重量也在日益提高,這些綜合因素導致各類交通事故不斷發生,其影響已經涉及到不同類型的部門、各行業和個人,甚至與全人類全社會都密切相關。其實,乘車與不乘車本身都存在一個安全問題,現代車禍及交通事故“是一場不休眠、無休止的戰爭”“汽車是殺人的可移動式的工具”[1],交通事故的危害性涉及面廣,周期時間長,不僅反映在傷亡人數上,在經濟方面所造成的損失也是巨大的,對家庭、行業發展的危害性也非常嚴重,已經成為一個全人類社會性的大問題[2]。
針對現代公路交通運輸的安全需求,尋求行駛車輛車頭時距與其整備質量之間的相互關系,以提高公路交通的安全度和通行能力,改善日益惡化的公路交通。本研究通過對大量的實測六軸貨車整車質量及車頭時距數據進行關鍵聚類中心的計算分析和確定,明確整車質量對車頭時距之間的相互影響關系。其目的在于為各種安全措施或保護裝置的設置或者管理,尤其為廣大駕駛員提供數據參考和駕駛行為的指導,達到遏制交通事故發展的目標。這無論從經濟方面、還是從人道方面,或者從這個社會層面來看,都具有非常重要的現實意義。
1 車頭時距
車頭時距是評價駕駛安全性的重要指標,它與交通流組成、駕駛行為密切相關,是反映道路通行能力和服務水平的重要依據[3]。從定義上來說,所謂車頭時距指的是在同一車道上行駛的車輛隊列中,兩輛連續車輛車頭端部通過某一標準斷面所用的時間間隔。一般用ht 表示,車頭時距的單位為s/Veh。車頭間距一般使用平均車頭時距來描述,平均車頭時距等于平均車頭間距與平均車速之商。
在道路上行駛的不同車輛,其車間距相對來說是較小的,行駛車隊中任何一輛車的車速快慢都受前車行駛速度快慢的影響和制約,車輛駕駛員只能按照前車行駛提供的信息采用相應比較滿足安全要求的行駛車速,這種非自由行駛狀態在交通工程學中稱為車輛跟馳[4]。
跟馳狀態下行駛車輛具有制約性、延遲性和傳遞性的典型特征,這些特征也構成了車輛跟馳行駛的基本特征,另外也是車輛跟馳模型建立的基礎和理論基礎[5]。若駕駛員保持其駕駛車輛與前導車的距離為S(t),n為前導車,n+1 為后隨車,兩車在剎車操作后的相對位置如圖1所示。
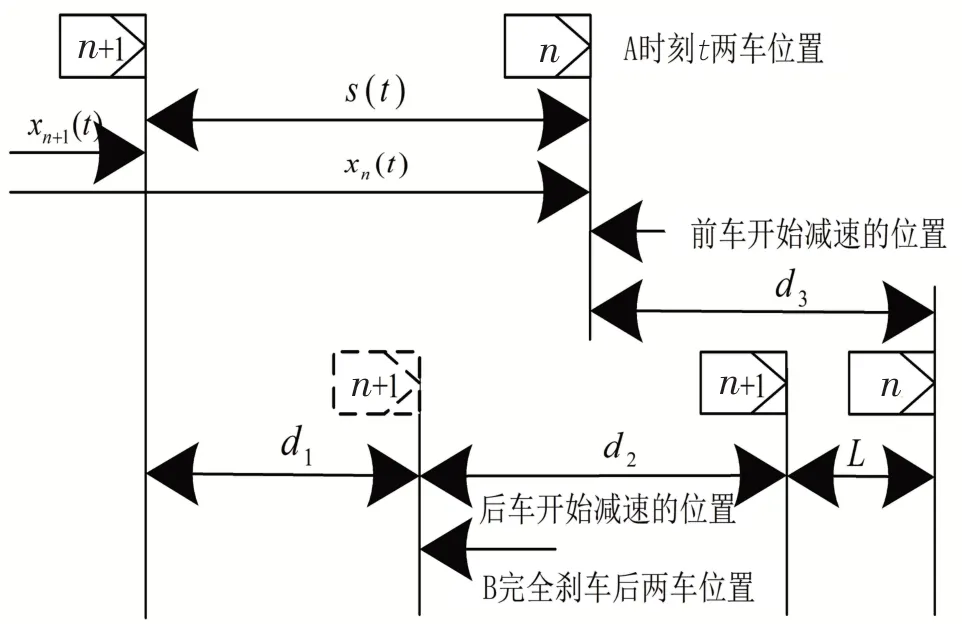
圖1 線性跟車模型示意圖
為行駛安全駕駛員必須保持車輛與前導車一定的距離,后隨車的反應與前導車發出的刺激成正比[6]。
2 車輛交通特性
行人、車輛、道路的時空分布規律與交通流的特性是道路交通的最基本要素特征。道路服務的車輛有小汽車、客車和貨車等不同類型車輛,車輛駕駛員的視線高度,車輛本身的尺寸、整備質量、最高行駛車速、加速度、加速時間和性能以及其他一些特性都決定了車道寬度、豎向凈空、路梁荷載,這些因素也通過各種形式影響行駛車輛車頭時距的不斷變化。
為確保不同等級公路上各類車輛行駛的安全性,前后兩輛車輛必須保持一定的車頭時距,并需要時刻做好制動剎車的準備,行駛車輛的制動性能主要體現在制動距離或者制動減速上,還體現在制動效能的穩定性和制動時汽車的方向穩定性上,制動過程實際上是汽車行駛的動能通過制動器轉化為熱能,當溫度升高后,能否保持在冷狀態時的制動效能對于高速時制動或長下坡連續制動都至關重要,因為制動效能喪失引發的交通事故比例也是非常之高[7]。
3 駕駛員的交通特性
行駛車輛制動距離等于反應距離與制動距離(剎車距離)之和,在道路交通安全要素中,除行人和自行車交通以外,其他行駛任務都由駕駛員來負責完成的。因此,絕大多數交通事故的發生直接或者間接地都與駕駛員的駕駛水平、反應速度、行駛環境、情緒狀況、生理和心理等眾多因素密切相關,尤其反應距離受駕駛員反應操作、心理和生理特性的影響非常明顯。另外,如果所駕駛的車輛車輪發生跑偏,車輛將會有側滑信息,這也能影響行駛車輛的制動距離[8]。
表1 為駕駛員視野與行車車輛速度的對應關系,車速與駕駛員視野之間的關系成反比,車速越高,駕駛員視野范圍越小,同時隨著整車質量的增加,由于質量慣性的影響,對駕駛員行車制動操作將提出更高的要求。
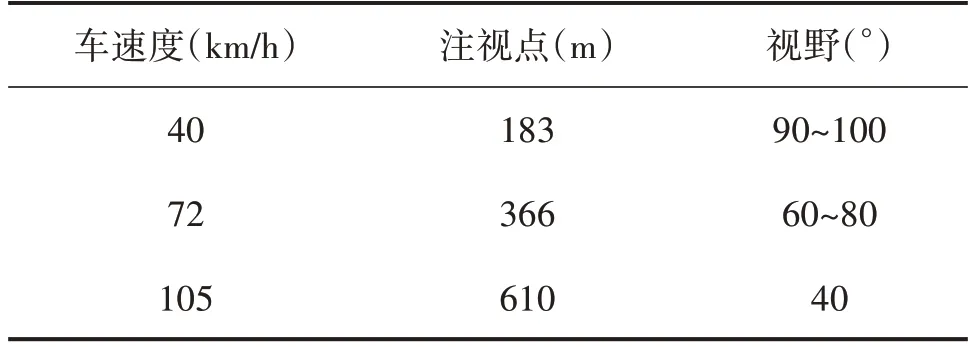
表1 駕駛員視野與行車速度的對應關系
4 整車質量對車輛制動效果影響分析
物質在相互發生作用的過程中,會發生物質、能量之間的運動轉化,原有的平衡狀態就會被改變或打破,以形成具有新的運動狀態和結構形態的物質。根據愛因斯坦質能守恒方程的原理可知,一定的質量對應于一定的能量,反之來說一定的能量也對應者一定的質量。這樣就可以進一步認為,慣性就是能量的屬性,能量是具有慣性(質量),任何慣性質量都應歸因于能量。狹義相對論的結果也顯示,能量與質量不是互不相干的物理屬性,而是可互相轉換的[9]。
在非自由流行駛狀態下,行駛車輛制動的距離受車輛制動前的瞬時速度(一般也稱為初速度)、車輛整車質量、輪胎性能狀況、制動系統及路面光滑程度等眾多因素的影響,其中主要因素就是車輛制動力和車重。車輛制動力指剎車片與剎車盤之間的摩擦力以及輪胎與路面之間的摩擦力,車輛整車質量對制動力的大小產生積極效果和作用[10]。表2為我國《商用車輛和掛車制動系統技術要求及試驗方法》(GB 12676-2014)中,關于不同車型在空載狀態時對制動距離的要求數據信息。
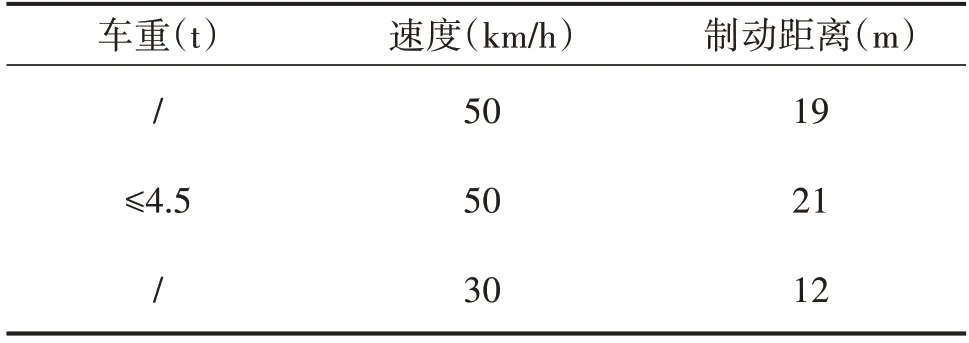
表2 不同車型(空載時)制動距離要求
基于基本生活經驗人們也可以認識到,行駛運動快的汽車剎車難度增加那是因為運動速度越快,物體的運動狀態越難被改變。車輛在行駛過車中的實際剎車,輪胎沒剎死,防抱死制動系統(ABS)本身功能就是防抱死車輛失控,尤其是滾動摩擦剎車效果或者從滾動摩擦進入滑動摩擦的時間受車重影響非常之大[11]。這也進一步從物理學的角度解釋說明了整車質量對車輛制動、車頭時距及交通安全產生的重要影響。
5 整車質量與車頭時距相關性分析
公路交通運輸是交通運輸的重要組成部分,隨著公路工程建設項目和里程的快速增長,人民物質生活水平也在全面提高,汽車成為人民出行的必備交通工具,致使公路上行駛的車輛形色各異,受出行目的、交通環境、駕駛人員等眾多因素的限制,行駛車輛的整車質量也呈現出多樣化的表現。本研究通過收集某條高速公路24 h 內全部六軸貨車的行駛速度、整車重量和車頭時距等相關基礎數據,按照行駛速度的升序排列了24 h 內行駛該六軸貨車的數量分布情況,共產生1 089組數據。如圖2所示,可見部分六軸貨車的最大時速也達到了100 km/h以上。
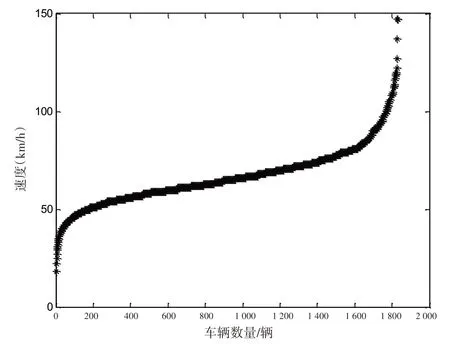
圖2 24 h內車輛行駛速度(升序)趨勢圖
為進一步驗證論文統計分析結果的有效性和統計結果展現的直觀性,選擇統計分析數據中的樣本數據,先按照車輛行駛速度的升序進行排列,再通過模糊C均值聚類(FCM)聚類算法對整車質量分布散點數據進行類中心計算確定,并采用Matlab 軟件中自帶的shape preserving函數勾畫出類中心保形曲線,全部車輛整車質量樣本數據分布如圖3所示。
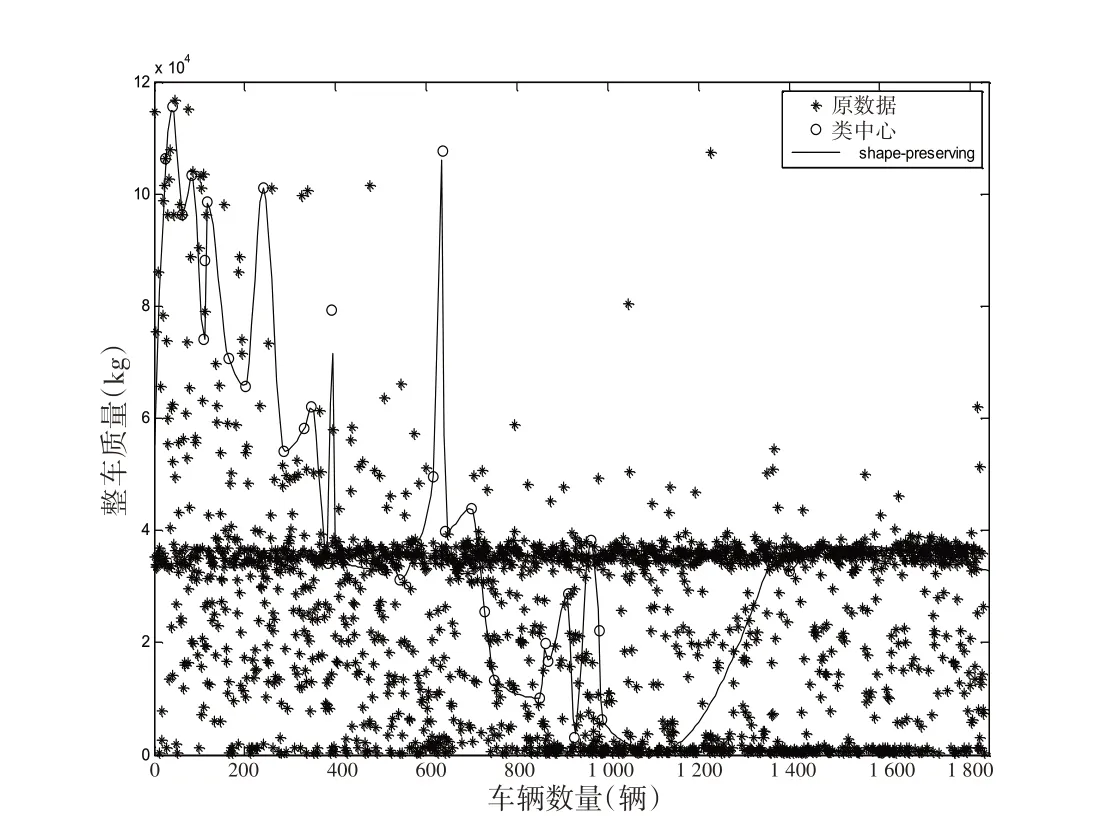
圖3 升序車速條件下整車質量數據分布
通過對圖3 分析可進一步看出,車輛行駛速度較低的時段,整車重量也較大,隨著行駛車速的增長,整車重量隨之下降,聚類中心保形曲線呈現出波形下降趨勢,直至達到一個基本穩定的形態。這說明車輛行駛速度受到整車質量這一因素的影響和制約,兩者呈現出一定的負相關性。
采用零階(Pearson)相關性分析方法,分析整車重量與車頭時距之間直接的相關性,相關性數據計算結果為0.041,可知行駛車輛整車質量和車頭時距無明顯相關性。
將車輛整車載重升序排列之后,擴展相應的車頭時距分布數據可知,車頭時距數據分布均勻,未受到車輛載重因素的制約。同理,在車輛行駛速度升序排列之后,擴展相應的車頭時距數據,其數據結果分布類似,也驗證了前人在車輛載重重量和車頭時距關系研究中得出的基本結論,即車頭時距不隨速度的變化而波動。
通過對整車質量與車頭時距的相關性分析分析足以說明以下問題:一是受整車質量的限制,車輛載重量較大時,車輛行駛速度較低;二是隨著車輛載重量的減輕,車輛行駛速度將有所提高,隨著整車質量的進一步減輕,車輛行駛速度有進一步的提高現象,但是基于安全考慮,這時候駕駛員駕駛安全性可控量會被進一步壓縮,而車頭時距表示的是前后兩車通過某一斷面的時間差,其不隨行車速度和車輛載重而呈現大幅波動。
車輛行駛速度、整車質量及車頭時距的分布現象符合車輛動力學性能和駕駛員安全駕駛心理的要求。
6 結論
本研究從車輛非自由行駛狀態模型入手,詳細介紹了車輛跟馳模型表現的原理和方法,分析了行駛車輛和道路交通的基本特性,并從物理學角度出發論述了整車質量對駕駛員駕駛操作和車頭時距產生的影響。文章在行車速度升序排列的條件下,采用FCM 聚類算法對整車質量實測數據進行類中心確定,結果顯示車輛行駛速度受整車質量的制約,載重量與行駛速度呈負相關性,而車輛載重和行車速度對車頭間距不產生波動性影響。該研究成果可為駕駛員的安全駕駛及交通安全管理政策制修訂等工作提供一定的數據參考和行為指導。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
汽車電器(2018年1期)2018-06-05 01:22:54
產品可靠性報告(2017年7期)2017-09-05 09:49:12
公民與法治(2016年4期)2016-05-17 04:09:26
汽車觀察(2016年3期)2016-02-28 13:16:26