基于改進智能駕駛員模型的車隊縱橫向協同控制
2022-09-28 02:30:28覃頻頻張順鋒吳鋒民譚鴻運黃俊明
公路交通科技 2022年9期
關鍵詞:模型
覃頻頻,張順鋒,吳鋒民,譚鴻運,黃俊明
(1. 廣西制造系統與先進制造技術重點實驗室, 廣西 南寧 530004; 2. 廣西大學 機械工程學院, 廣西 南寧 530004)
0 引言
智能網聯汽車作為智能交通領域的重要組成部分,近年來已成為國內外各大研究院和車企的研究熱點[1]。其中縱橫向協同控制是智能網聯汽車實現自動駕駛的關鍵技術之一[2],由于車輛是高度非線性、強耦合的時變系統,獨立進行縱向或橫向控制將可能導致整車性能沖突,降低控制系統精度和安全性[3]。因此在保證行駛安全性、舒適性和平順性等前提下,如何有效利用車輛縱橫向關聯特性,實現對智能網聯汽車組成的車隊的縱橫向協調控制,還需要進一步研究。
Bayuwindra等[4]針對智能網聯車隊縱橫向協同控制設計了基于協同自適應巡航的縱橫向非線性控制器,該控制器通過雷達和Vehicle to Vehicle (V2V)獲取引導車輛速度和航向信息,實現車隊基于縱向安全距離的跟馳行駛,且能夠補償車隊中的急轉向行為。Chen等[5]提出了一種分層混合控制系統,該系統高層根據周圍車輛狀態做出安全的駕駛行為決策,低層采用模型預測控制方法整合車輛縱向和橫向控制。Tork等[6]提出了一種基于改進的自適應神經控制器的模型獨立控制方法,通過轉向角和扭矩的輸入實現了縱橫向運動的協同控制。梁藝瀟等[7]采用神經網絡逆系統與內模控制器結合的解耦控制策略實現了汽車縱橫向運動之間的解耦,并通過反饋調節進一步提升控制系統性能,使其在各種輸入條件下都能良好跟蹤期望速度和橫擺角速度。謝輝等[3]提出了一種基于模型預測控制的縱橫向協同控制方法,該方法將當前車輛系統狀態與縱向速度預測序列輸入橫向控制器,實現車輛速度與路徑的有效控制。李軍等[8]考慮路面地形因素提出了一種基于Proportion Integral Differential (PID)和模型預測控制的縱橫向協同控制方法,該方法有效減少了路徑跟蹤誤差,且改善了車輛的行駛穩定性。
以上研究雖然考慮了車輛縱橫向運動耦合特性,但未考慮彎道、超高和坡度等道路幾何設計參數對協同控制的影響。為此,設計基于改進智能駕駛員模型與單點預瞄模型相結合的縱橫向協同控制系統,并在Carsim/Simulink聯合仿真平臺中設置加減速、雙移線和匝道工況驗證該系統的協同控制性能。
1 縱向跟馳控制系統
對智能網聯環境下的車隊跟馳車輛,基于車聯網技術獲取道路參數和車輛相關行駛信息[9],并傳遞給縱向跟馳控制系統的上層加速度模型求解期望加速度,隨后下層逆縱向動力學模型根據接受的上層加速度信息,協調控制發動機節氣門開度與制動壓力,最終實現對引導車輛的縱向跟馳行駛。
1.1 上層加速度控制模型
IDM模型是2002年Helbing[10]在大量試驗基礎上,結合以往經典交通流跟馳模型而提出的廣義力模型。該模型中參數較少,且均有明確意義[11],是目前最完整、最簡單、無事故的跟馳理論模型,故可應用于車輛縱向跟馳控制。道路設計是為車輛提供高效、舒適和安全的行車環境[12],因此針對實際道路工況,考慮彎道、超高及坡度等道路幾何設計參數對跟馳行為的影響,得到IIDM模型[13]:
(1)
(2)
式中,ades為IIDM模型產生的期望加速度;aACC為由IDM模型產生的Adaptive Cruise Control(ACC)加速度;R0為彎道上車輛最小轉彎半徑;η為與R0相關的常數;R為道路曲率半徑;g為重力加速度;ih為道路坡度值;Vd為彎道設計時速;μ為橫向力系數;ie為道路超高值。
1.2 下層逆縱向動力學模型
下層逆縱向動力學模型包括逆發動機與逆制動系統模型。據圖1逆發動機特性曲面建立逆發動機模型。
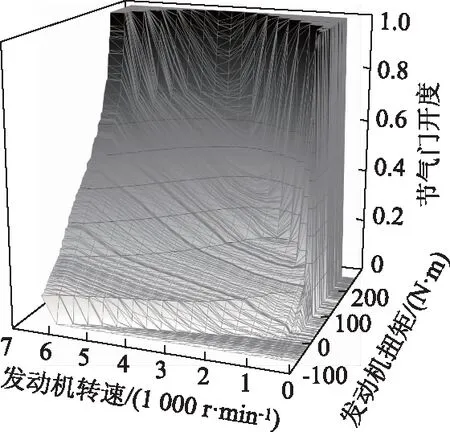
圖1 逆發動機特性曲面Fig.1 Curved surface of inverse engine characteristics
當車輛處于驅動工況時,由期望加速度計算發動機輸出扭矩和轉速,并通過逆向查表獲得期望節氣門開度[14]:
αdes=MAP-1(ωe,Te),
(3)
式中,αdes為期望節氣門開度;ωc為發動機轉速;Te為發動機轉矩。
當車輛處于制動工況時,發動機驅動力為0,車輛受力由汽車行駛平衡方程式簡化為:
mades=-Fxb-(Ff+Fω),
(4)
式中,m為車輛質量;Fxb為車輛制動力;Ff和Fω為滾動阻力與空氣阻力。
車輛在制動力限值范圍內,其制動力與制動壓力可視為線性正相關[15]。由逆制動系統模型計算期望制動壓力:
(5)
式中,Pdes為期望制動壓力;Kb為比例系數。
2 橫向軌跡控制系統
2.1 單點預瞄模型
假設駕駛員具有一定的軌跡預測能力,且在1個預瞄時間內車輛保持恒定的縱向車速與橫擺角速度[16]。基于上述假設,如圖2所示,車輛作以M為圓心、Ra為半徑的勻速圓周運動,其中θ為圓弧軌跡所對應的圓心角。
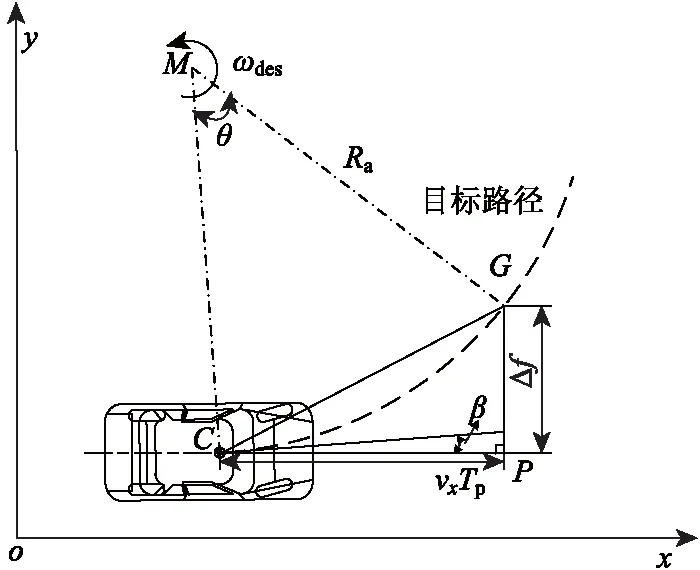
圖2 單點預瞄模型Fig.2 Simple-point preview model
由車輛動力學理論分析,可知橫擺角速度對轉向角的穩態響應Gω為:
(6)
(7)
式中,vx為車輛質心處縱向速度;isw為轉向系傳動比;L為軸距;Lf和Lr為質心到前、后軸的距離;K為車輛穩定性系數;K1和K2分別為前、后輪側偏剛度。
單點預瞄模型先根據橫向預瞄偏差決策出期望轉向角,再由車輛行駛過程中所感知的車輛狀態對轉向角進行反饋控制[17]:
(8)
(9)
式中,δf為滑模控制率;ωdes為期望橫擺角速度;Δf為橫向預瞄偏差;Tp為預瞄時間;β為質心側偏角;δdes為期望轉向角;Δδ為反饋控制轉向角;ω為實際橫擺角速度;Kω為反饋系數。考慮車輛處于穩態,取名義值為Gω。
2.2 滑模控制器
為提高軌跡跟蹤精度,在原模型基礎上設計滑模控制器代替反饋控制。選取實際與理想橫擺角速度之差為控制量:
e=ω-ωdes。
(10)
定義切換函數為:

(11)
式中λ為正的加權系數。
δf=δeq-φ·sgn(s),
(12)
(13)
式中,δeq為等效控制輸入;φ為系統的運動點趨近滑模切換面的速率,且需要滿足式(14);Iz為整車繞z軸的轉動慣量;sgn(·)為符號函數。
(14)
式中σ為正實數。
為進一步消除滑模控制輸入的高頻振動,改善控制性能,采用飽和函數替換符號函數[19]:

(15)
綜上,最終滑模控制率為:
δf=δeq-φ·sat(s/ε),
(16)
式中ε為邊界層厚度。
3 仿真驗證
3.1 縱橫向協同控制系統參數選取
以縱向跟馳控制系統的輸出速度為耦合變量,輸入橫向軌跡控制系統中,以此建立如圖3所示的縱橫向協同控制系統。
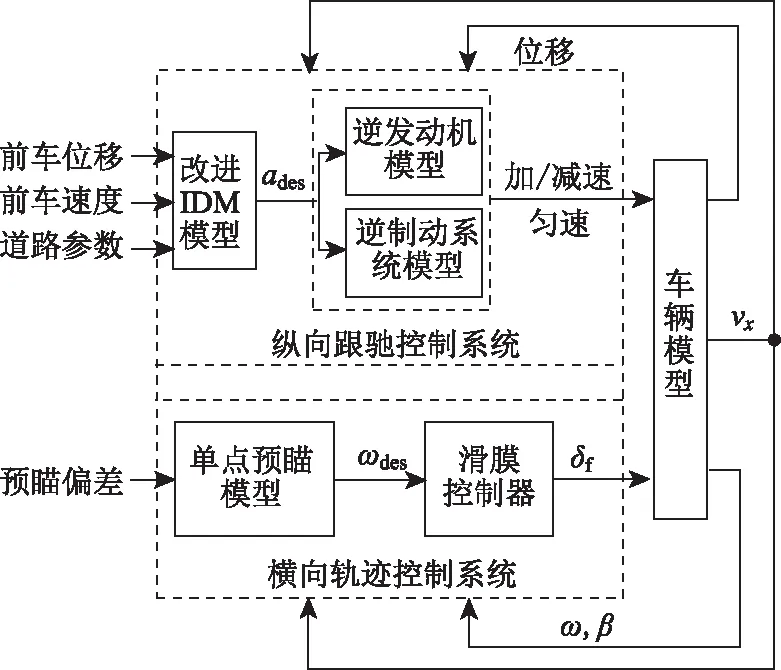
圖3 縱橫向協同控制系統Fig.3 Longitudinal and lateral coordinated control system
搭建Carsim/Simulink聯合仿真平臺,采用加減速、雙移線和匝道工況驗證該系統控制性能。其主要參數如表1所示。
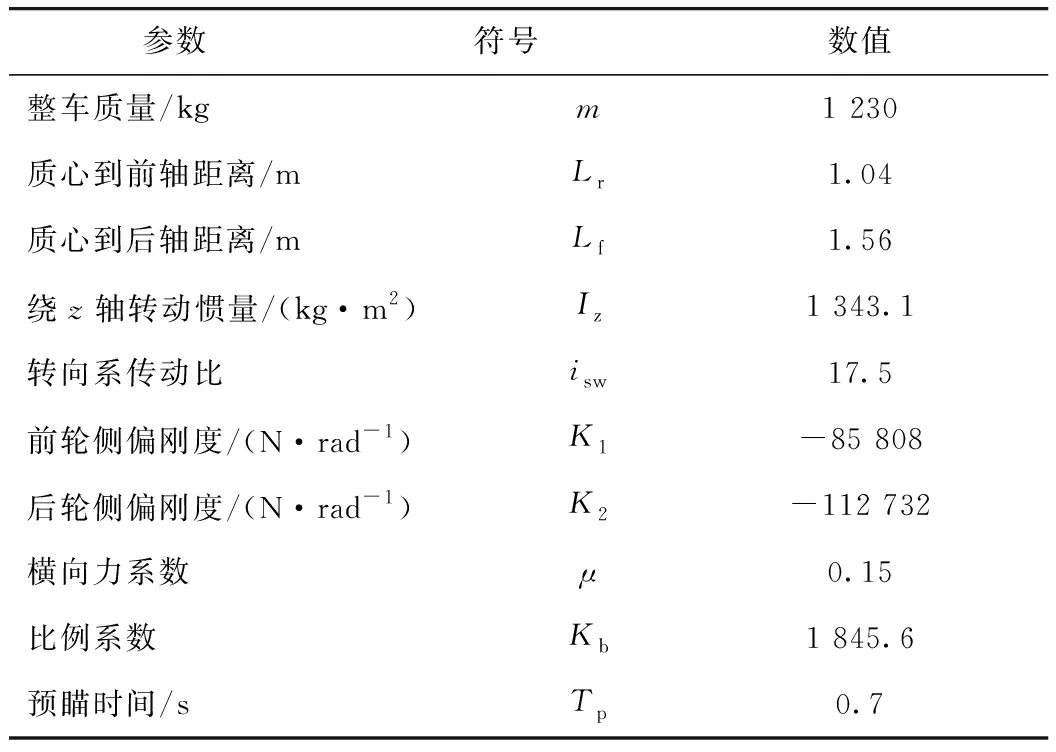
表1 協同控制系統主要參數Tab.1 Main parameters of coordinated control system
3.2 加減速工況
設置道路摩擦系數0.85,各車初始行車間距5 m。引導車輛以10 km/h初速度在80 s內完成一段勻加速、勻速和勻減速行駛。仿真結果如圖4所示。從圖4 (a)~(b)可看出,跟馳車輛皆對引導車輛速度和加速度保持較高的跟隨精度,且消除了引導車輛加速度的劇烈變化,提高了乘坐舒適性。從圖4 (c)可看出,行車間距在跟馳過程中與速度呈正相關,且當速度穩定為100 km/h時其趨向于31.42 m并保持穩定。綜上說明該協同控制系統具有良好的縱向跟馳性能。
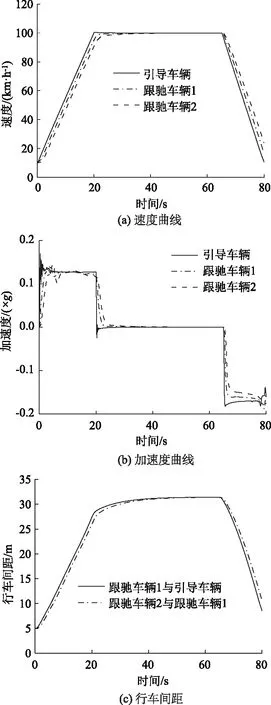
圖4 加減速工況Fig.4 Acceleration-deceleration conditions
3.3 雙移線工況
設置道路摩擦系數0.85,總長250 m的雙移線工況,分別采用Carsim內置的預瞄最優模型,和本研究基于反饋控制與滑膜控制的2種單點預瞄模型組成的協同控制系統,進行車速為40 km/h的仿真試驗,仿真結果如圖5所示。從圖5(a)可看出,2種控制系統轉向角與Carsim模型皆有較好的一致性且轉向平滑,其中滑膜控制的轉向角一致性更高。從圖 5 (b)~(c)可看出,2種控制系統皆具有較高的橫向軌跡跟蹤精度,側向偏移量皆小于0.2 m,其中滑膜控制的軌跡更接近理想軌跡。綜上說明,該協同控制系統具有較高的橫向軌跡跟蹤精度,且滑膜控制的跟蹤精度比反饋控制更高。
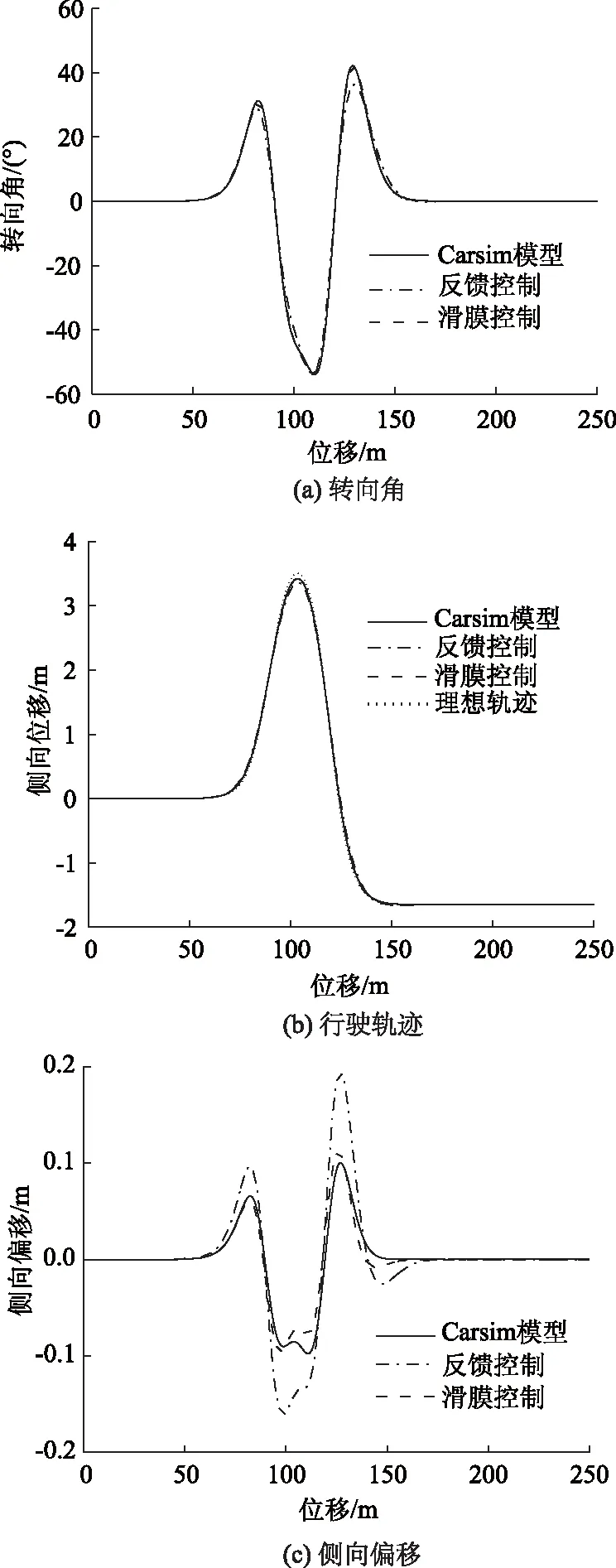
圖5 雙移線工況Fig.5 Double shifting line conditions
3.4 匝道工況
設置道路摩擦系數0.85,彎道半徑180 m,超高和坡度皆為2%的匝道,各車初始行車間距為19 m,車輛初速度60 km/h,匝道設計時速40 km/h。其中跟馳車輛分別采用基于IDM與IIDM模型搭建的縱橫向協同控制系統。仿真結果如圖6所示。可以看出,由2種控制系統所組成的智能網聯車隊整體都表現出了良好的縱向跟馳性能和較高的橫向軌跡跟蹤精度。從圖6 (b)~(c)可看出,駛入匝道時IIDM跟馳車輛比IDM跟馳車輛具有更大減速行為,且在匝道行駛過程中具有更大行車間距,其中IIDM跟馳車輛行車間距為14.16 m,比IDM跟馳車輛增加了0.55 m。從圖6 (d)可看出,2種系統的轉向角與引導車輛基本保持一致,但由于匝道出入口處超高存在突變,使車輛側傾狀態變化,導致車隊整體轉向角出現略微波動,同時由于車輛縱向速度變化存在耦合性,導致IIDM跟馳車輛轉向角略小于IDM跟馳車輛。
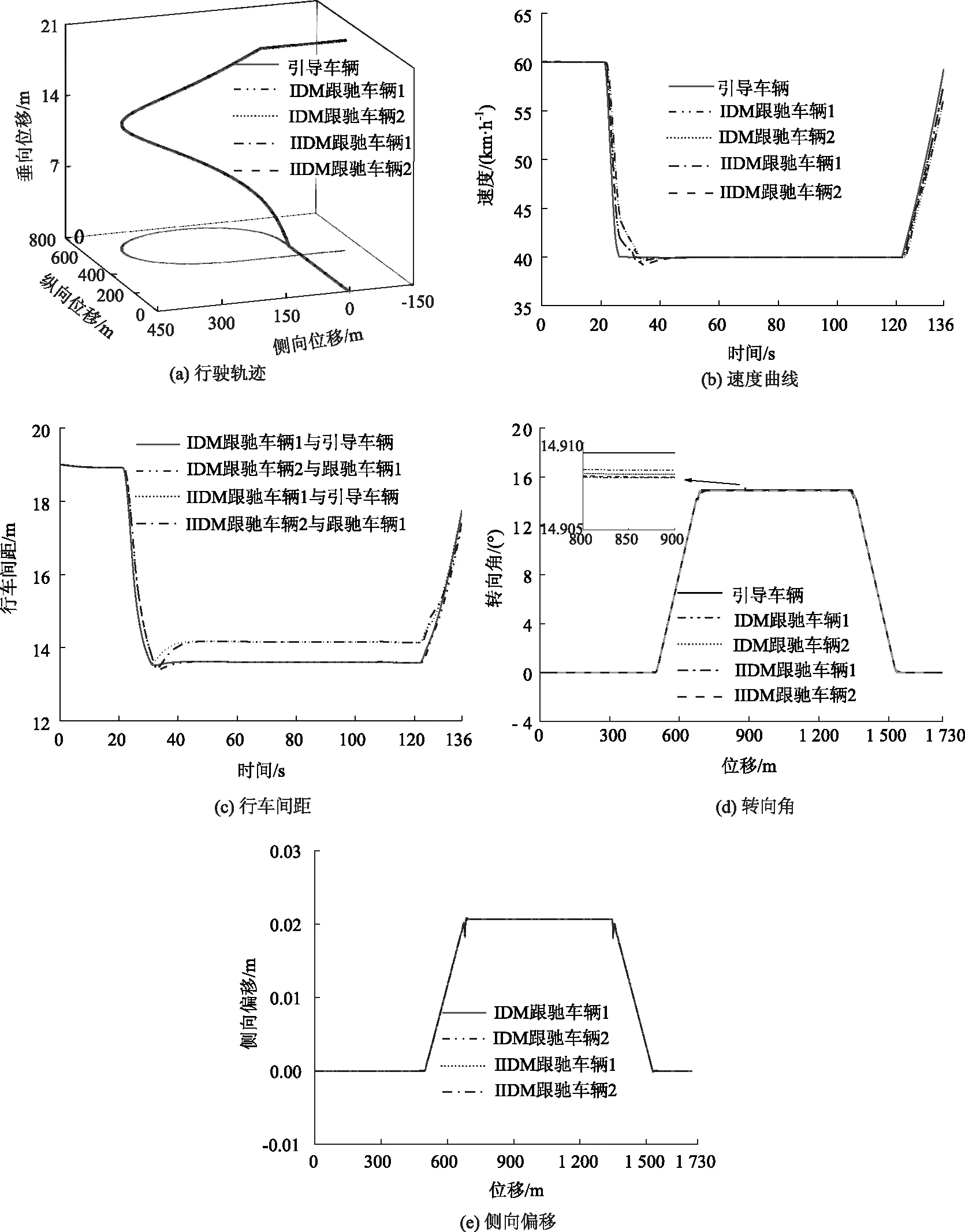
圖6 匝道工況Fig.6 Ramp conditions
從圖6(e)可看出,轉向角變化使得IIDM跟馳車輛平均側向偏移比IDM跟馳車輛小2.51×10-6m,同時轉向角波動導致側向偏移量出現略微波動,但最大值皆小于0.03 m,屬于安全范圍。綜上說明,基于IIDM模型所設計的協同控制系統在縱橫向運動控制上的表現皆優于IDM模型。
4 結論
考慮車輛縱橫向運動耦合特性,以縱向速度為耦合變量搭建了基于改進智能駕駛員模型與單點預瞄模型的縱橫向協同控制系統,研究道路幾何設計參數對智能網聯車隊縱橫向協同控制的影響,有效實現了智能網聯車隊的縱橫向協同控制。加減速、雙移線和匝道工況下的仿真試驗表明,建立的協同控制系統有良好的縱橫向及其協同控制性能,能夠較好地實現對引導車輛縱向跟馳行駛和橫向軌跡跟蹤。采用IIDM的協同控制系統對彎道、超高和坡度等道路幾何設計參數的縱橫向運動響應比IDM的控制系統更顯著,且控制性能更優異,更有利于車隊整體行駛安全性。
在研究縱向跟馳行為時采用了改進智能駕駛員模型,僅考慮了引導車輛的行駛信息,未考慮實際交通環境中多前車對跟馳行為的影響。同時在研究橫向軌跡跟蹤時采用單點預瞄模型,僅考慮了車輛前方單點的預瞄信息,未考慮實際決策過程中駕駛員往往會結合遠近2點的道路預瞄信息。故未來可進一步考慮多前車的行駛信息和遠近2點的預瞄信息對縱橫向協同控制系統進行改進,從而更全面地反映駕駛員操縱車輛的真實行駛情況。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19