
虛實結合的工業(yè)機器人實訓教學平臺和方法*
2022-10-09 08:37:16劉揚開王曉軍
機電工程技術 2022年9期
高 攀,鄒 胤,湯 超,劉揚開,王曉軍
(廣東技術師范大學工業(yè)中心,廣州 510665)
0 引言
制造業(yè)是國民經濟的支柱產業(yè),進入21 世紀,世界范圍內掀起了新一輪的科技革命和產業(yè)革命,以互聯(lián)網、新能源、新材料、生物科學,機器人技術[1-3]為代表的技術得到了蓬勃發(fā)展,深深地改變著世界競爭格局和歷史進程。同時對傳統(tǒng)教育教學模式也產生較大的沖擊,尤其是機械、車輛、自動化等工科學生,在當前互聯(lián)網的超強滲透下,大量自動化、智能化、網聯(lián)化的新技術在改造升級甚至顛覆傳統(tǒng)的制造產業(yè),產業(yè)變革的一個明顯特征便是學科之間的界限越來越模糊,不同學科之間不斷融合交叉,這些變化對于傳統(tǒng)學科、舊體系教學方法都提出了嚴峻的挑戰(zhàn),新工科建設便是應對這一挑戰(zhàn)做出的正面回應,教育部高等教育司發(fā)布《關于開展新工科研究與實踐的通知》[4],新工科提倡學科的交叉性、綜合性,著力培養(yǎng)新興工程科技創(chuàng)新和產業(yè)創(chuàng)新人才,服務產業(yè)轉型升級。
工程訓練作為工科學生最為重要的實踐教學平臺,肩負著培養(yǎng)學生實踐能力和創(chuàng)新意識的重任,是理論知識與工程實踐、工業(yè)制造之間的橋梁。傳統(tǒng)的工程訓練包括車、銑、刨、磨、鉗、鑄造、鍛造等,近年為響應國家號召和適應產業(yè)變革,數控、加工中心、機器人、3D 打印等一系列新設備不斷投入教學研究中,教學學時也逐年增加,但受制于設備情況和教師現(xiàn)狀,仍存在著較多的問題,不能滿足學生的學習需求和教學要求。以工業(yè)機器人為例,從20 世紀中期,隨著計算機,自動控制原理技術的成熟,應用于數控機床的控制系統(tǒng),伺服電機、減速器得到快速的發(fā)展,為工業(yè)機器人的發(fā)展奠定了堅實的基礎[5],但目前工業(yè)機器人設備昂貴,建設初期數量較少,留白時間較長,不能滿足學生上課操作需求,機器人操作復雜,初期上手較難,講解浮于表面不能深入,學習效果有限等問題,嚴重制約著機器人實踐教學效果,亟需優(yōu)化實踐教學平臺流程,豐富和優(yōu)化教學方法,提高教學質量和效率[6]。
本文從政策要求和教學實際出發(fā),提出建立了一種虛實結合的工業(yè)機器人實訓教學平臺和方法,包括機器人實體操作平臺和和虛擬仿真平臺。其中實體操作平臺主要采用業(yè)內知名廠商機器人產品搭建,有串聯(lián)六自由度機器人、并聯(lián)機器人、雙臂機器人,虛擬仿真平臺包括基于Matlab的機器人運動學和動力學虛擬仿真和基于RobotStudio的機器人編程和動畫仿真,實現(xiàn)了兩種平臺之間的優(yōu)勢互補,極大提高了學生的參與度和積極性,加深學生對于理論知識的理解和掌握,實現(xiàn)實踐教學目標。
1 工業(yè)機器人實體平臺搭建
1.1 實體平臺要求
實訓最重要的特點是實踐性,讓學生有更長的時間去操作設備,熟練掌握設備的基本結構組成、工作原理和操作技巧,與理論知識相互印證,寄希望將來在此基礎上能進一步創(chuàng)新創(chuàng)造,但受制于實訓設備數量不足,功能單一,實訓項目簡單,理論知識枯燥,計算繁瑣等客觀條件,學生實訓效果和教學效果都未完全達到預期,因此新開發(fā)的工業(yè)機器人實訓教學平臺有以下幾個方面的要求:(1)盡可能增加機器人數量,減少學生操作留白,提高學習效率;(2)豐富機器人品種,雖然各個品牌機器人結構形式和組成越來越趨于一致,但控制邏輯操作方法仍有差異,對比掌握;(3)增加單臺機器人的功能模塊,盡可能在一臺機器人本體結構周邊提供盡可能多的功能模塊,循序漸進提升操作所需技能。
1.2 實體平臺搭建
基于以上要求,中心搭建的工業(yè)機器人實訓工作平臺如圖1 所示,整體可分為桌面型工業(yè)機器人和落地式工業(yè)機器人,其中桌面型工業(yè)機器人體型較小,布置靈活,開放式布局,非常適于教學;落地式工業(yè)機器人尺寸較大,其工作范圍和負載能力更強,更加貼合產線實際生產,各個機器人實訓工作基本組成大體一致,都包括機器人系統(tǒng)本體模塊、功能實訓模塊、觸控顯示編程系統(tǒng)等,其中機器人系統(tǒng)本體和控制器是整個實訓工作站的核心,采用市場成熟產品,根據自身教學和科研需求設計功能實訓模塊,具體介紹如下。
1.2.1 桌面型工業(yè)機器人
(1)雙臂機器人實訓工作站(ABB),如圖1 標號1 所示,機器人本體采用ABB 機器人IRB 14000 型,有效負載0.5 kg;臂展0.5 m,配2 個伺服夾爪、1 個視覺、1 個真空,配備有清潔器裝配實訓模塊和物塊視覺分揀實訓模塊。
(2)六軸工業(yè)機器人多功能實訓工作站(ABB),機器人本體采用ABB 機器人IRB 120 型,采用IRC5C 緊湊型控制器,如圖1標號2所示,有效負載為3 kg,臂展0.58 m,配1個真空,1個循跡指針,配備有描圖、打磨拋光、裝配、涂膠、碼垛、自動送料、拾取物料、物料搬運等實訓模塊,詳細如圖2所示。

圖1 工業(yè)機器人實訓工作平臺

圖2 桌面型工業(yè)機器人多功能實訓工作站(ABB-IRB120)
(3)六軸多功能實訓工作站(庫卡),如圖1 標號3 所示,機器人本體采用庫卡KR3R540型機器人,負載3 kg,動態(tài)范圍0.541 m,具有結構緊湊、電線內置、干擾輪廓小等特征,配備有描圖和碼垛實訓模塊。
(4)六軸多功能實訓工作站(安川),如圖1 標號4 所示,機器人本體采用安川MOTOMAN-GP7 型機器人,負載7 kg,動態(tài)范圍0.927 m,廣泛應用于搬運、取件/包裝、碼垛、組裝/分裝等場合,配備有描圖和碼垛實訓模塊。
(5)六軸工業(yè)機器人多功能實訓工作站(Fanuc),如圖1標號5 所示,機器人本體采用Fanuc LRMate200iD-4s 型機器人,負載4 kg,動態(tài)范圍0.55 m,配1 個真空,1 個循跡指針,配備有描圖、打磨拋光、裝配、涂膠、碼垛、自動送料、拾取物料、物料搬運等實訓模塊。
(6)并聯(lián)型機器人多功能實訓工作站(Fanuc),如圖1 標號6 所示,機器人本體采用Fanuc/M/1iA/0.5SL 并聯(lián)型蜘蛛手機器人,負載0.5 kg,動態(tài)范圍0.42 m,動作敏捷,結構緊湊,廣泛應用于電子行業(yè),配備了物料分揀、視覺碼垛、軌跡描繪、涂膠等實訓模塊。
1.2.2 落地型工業(yè)機器人
(1)六軸工業(yè)機器人多功能實訓工作站(Fanuc),如圖1標號7所示,機器人本體采用FanucM-20iD/25六軸機器人,負載25 kg,動態(tài)范圍1.83 m,結構緊湊,剛度大,響應快速,配雙吸盤夾具、吸盤夾手夾具、1 個真空,配備有視覺碼垛、搬運、監(jiān)測分揀以及裝配等實訓模塊。
(2)移動上下料工業(yè)機器人實訓工作站(Fanuc),如圖1標號8所示,機器人本體采用FanucM-20iD/25六軸機器人,采用R-30iB Mate Plus 控制器,機器人安裝在一個高精度直線導軌系統(tǒng)上,大大增加機器人的活動范圍,配有多工位鉆孔加工平臺,機器視覺檢測平臺,智能立體倉庫等,配備有機器視覺碼垛、移動上下料、多孔位鉆孔加工等實訓模塊。
整個工業(yè)機器人實訓平臺整體是開放式布局,囊括了ABB,發(fā)那科,KUKA,安川等市場主流品牌機器人品牌和系統(tǒng),包含雙臂型、并聯(lián)型、串聯(lián)型等各種機器人結構形式,具備描圖、打磨拋光、裝配、涂膠、碼垛、自動送料、拾取物料、物料搬運等實訓模塊,可以充分滿足學生實訓、競賽科創(chuàng)、教工科研等各種需求。
2 工業(yè)機器人虛擬仿真平臺搭建
2.1 基于Matlab的工業(yè)機器人虛擬仿真平臺搭建
機器人實訓離不開實踐練習,但是如要理解機器人關節(jié)運動、電機選型、速度控制等理論知識,虛擬仿真技術具有較大的優(yōu)勢,在機器人學的理論教學中,通常都偏重于理論知識,尤其是矩陣和控制原理的介紹,繁瑣抽象的公式和計算降低了學生的學習熱情,以Matlab為基礎的軟件教學作為理論教學的補充,尤其是基于Matlab 的機器人工具箱[7],不僅可以方便依據機器人結構參數快速進行本體建模,完成運動學和動力學仿真,還可以研究多項式路徑規(guī)劃、拋物線路徑規(guī)劃、多段分割路勁規(guī)劃及各種先進算法等,基于Matlab機器人工具箱的教學思路流程如圖3所示。

圖3 基于機器人工具箱的教學思路
基于Matlab/Simulink 的機器人工具箱建模最為常用的方法是DH 參數法或者MDH 參數法進行,圖4 所示為MDH 坐標參數建模規(guī)范,只需要確定桿件長度a、桿件扭角α、關節(jié)轉角θ、關節(jié)距離d四個參數便可以建立機器人本體模型,從參數來看,MDH 參數中各個參數的物理意義與標準DH 參數是一樣的,從功能來看,對于大多數串聯(lián)型機器人而言,其表現(xiàn)能力都是一樣的,不同的地方是MDH法能夠克服DH不能應用于平行軸和閉環(huán)機構的缺點[8];從教學內容來看,兩者之間并沒有本質的區(qū)別,不會大幅增加課時量,因此在教學中將分別講解DH參數法和MDH參數法,并對比其建模異同之處。

圖4 MDH坐標參數建模規(guī)范
選定建模方法后,根據機器人本體結構參數進行相應坐標系的建立,這部分是進行模型建立的基礎,技巧性強,需要較多講解和練習,圖5 所示為IRB120 機器人工作站尺寸參數圖,其中包含根據MDH 要求建立的坐標系,依據坐標系便可以方便寫出MDH 參數表,如表1 所示,針對MDH 參數表,各個坐標的位姿矩陣連乘得到最后一個驅動關節(jié)上的坐標系到機器人基坐標系的齊次變換矩陣,如果要得到末端工具坐標還需要增加一個平移變換,這也是MDH參數比DH參數表多一行,即多了一個平移變換矩陣,值得注意的是,不管是DH或者MDH參數表并不是唯一的,與坐標系的選取和坐標軸的方向有關,但是無論何種方法,計算得到的末端空間坐標應該是一致的。

圖5 IRB120尺寸參數和坐標系建立

表1 IRB120型號機器人MDH參數表
依據所得到的DH 或MDH 參數表,基于Matlab robotics toolbox建立IRB120機器人構型圖,如圖6所示,采用示教顯示機器人,可方便調整6 個關節(jié)角度,能夠讓初學者更好地了解六軸機器人的結構,另外通過6 個關節(jié)角度的調整使得所建立的模型零位姿態(tài)和實體模型相對應,進而進行虛擬模型與實體模型互相驗證。
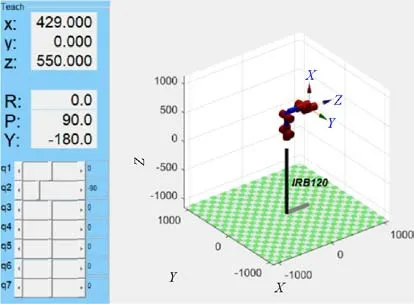
圖6 基于MDH法的IRB120機器人構型
模型搭建完成后,采用任務驅動式的教學方法,目前已經開發(fā)的教學任務有3個。
(1)機器人運動學正解,即給定各個關節(jié)的運動參數,求取末端執(zhí)行器相對參考系(一般為大地基坐標)的位姿;如圖7 所示為IRB120 型機器人運動學正解示意圖,給定6 個關節(jié)的轉動角度,可方便求得到末端執(zhí)行器的位姿。

圖7 IRB120機器人運動學正解示意圖
(2)機器人運動學逆解,即給定滿足工作要求的末端執(zhí)行器相對參考坐標的位姿,求取關節(jié)的運動參數,運動學逆解求取一般會得到多組滿足條件的解,其中會有一組解是最優(yōu)的,因此在求取過程中需要對滿足條件的解進行篩選。IRB120 型機器人其運動軸線滿足Pieper 準則[9],因此具有封閉解,可方便通過fkine函數進行求解,大幅度降低計算量。
(3)機器人路徑規(guī)劃[10],即給定一定的物理約束條件,機器人完成設定任務和動作所設計的運動序列安排,通俗解釋就是機器人找到一條起始點到目標點的合適路徑,目前進行軌跡規(guī)劃的方案主要有兩種,基于關節(jié)空間方案和基于直角坐標方案,出于兩種方案在實踐中的應用情況,在教學中以講解關節(jié)空間求解為主,如圖8 所示為基于多項式優(yōu)化的末端執(zhí)行器從起始位置(429,0,550)到目標位置(-400,100,400)的路徑規(guī)劃,運動路徑和關節(jié)速度較為平滑。
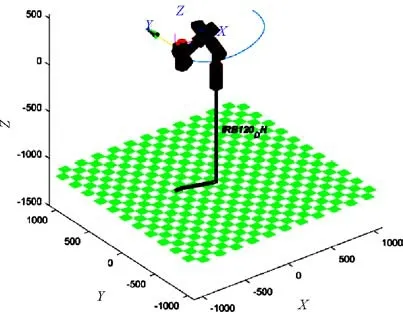
圖8 IRB120機器人路徑規(guī)劃示意圖
2.2 基于RobotStudio的工業(yè)機器人虛擬仿真平臺搭建
RobotStudio[11-12]是全球廣泛使用的機器人離線編程軟件,由瑞士ABB 公司開發(fā),其最大的優(yōu)勢是可以快速建立與現(xiàn)實生產場景高度吻合的虛擬場景,并能在不停產停機情況下進行離線仿真,因此非常便于在不影響生產的情況下執(zhí)行培訓、編程和優(yōu)化等任務,可有效降低風險、快速調試,提高機器人使用效率,廣泛應用于增強現(xiàn)實,數字孿生以及虛擬調試的場合。RobotStudio 可以兼容主流3D 建模軟件模型,方便調用模型庫中ABB 機器人模型和建立控制器,可以像使用實際示教器對機器人進行操作和編程,離散驗證程序的正確性,程序無需任何的轉換便可以下載到實際機器人中進行使用,正是由于RobotStudio 的易用性和強大功能,得到了許多高校教學的青睞[13-14],基于此在機器人編程和動畫仿真教學方面采用RobotStudio作為主要的教學軟件。
基于RobotStudio建立一個可以離線編程的機器人虛擬平臺一般需要3 個步驟[13],工作站模型搭建,Smart 組件設計和I/O連接及工作站邏輯設計3 個階段,RobotStudio 重在仿真和智能環(huán)境的搭建,造型功能薄弱,一般是從主流CAD 軟件導入建好的模型,支持STP 和SAL 格式[15],調整位置形成仿真平臺框架;接下來添加Smart 組件,賦予模型動作和邏輯屬性連接,模擬真實機器人的動作過程,最后在控制器設計中將Smart 組件和機器人的輸入輸出接口通過I/O 端口相互關聯(lián),模擬數據通信,便可以進行RAPID 離線編程,如圖9(a)所示為ABB/IRB120 桌面型機器人虛擬仿真平臺,如圖9(b)所示為Fanuc/M-20iD/25 落地式機器人虛擬仿真平臺,限于篇幅,其他機器人虛擬工作站沒有展示,多平臺、多功能的虛擬仿真平臺可以充分滿足教學和科研需求。

圖9 基于Robotstudio的機器人虛擬仿真平臺
3 實體平臺與虛擬仿真平臺融合和應用
實踐出真知,也是創(chuàng)新的基礎,無論是機器人實體平臺還是虛擬仿真平臺都需要學生動手操作,加深理論知識理解和掌握操作技能,基于本校專業(yè)人才培養(yǎng)目標、企業(yè)用工需求、及理論和實踐課程之間聯(lián)系的原則,機器人教學平臺和教學方法采用虛實結合、循序漸進、從面到點、任務驅動的實訓教學模式,構建以實訓操作過程與結果相結合的評價體系,具體操作過程如表2 所示。第一階段,通過PPT 講解使學生了解工業(yè)整體結構和各個部分組成,然后通過實體平臺講解和演示學習應用操作,如手動自動操作模式,空間笛卡爾坐標關節(jié)坐標的差異,形成一個整體的感性認識;第二階段,需掌握基于Matlab的機器人建模技術,進行正逆運動學求解和初步路徑規(guī)劃,掌握基于RobotStudio機器人仿真環(huán)境搭建,具備機器人運動學和動力學分析能力,機器人離線編程能力;第三階段為探索性質的教學,可研究在約束條件下的效果更好的路徑規(guī)劃算法,如蟻群算法等,其次可以更加深入地研究機器人某一個方面的問題,以及機器人應用領域的拓展等,為研究生和教師提供良好的科研平臺。
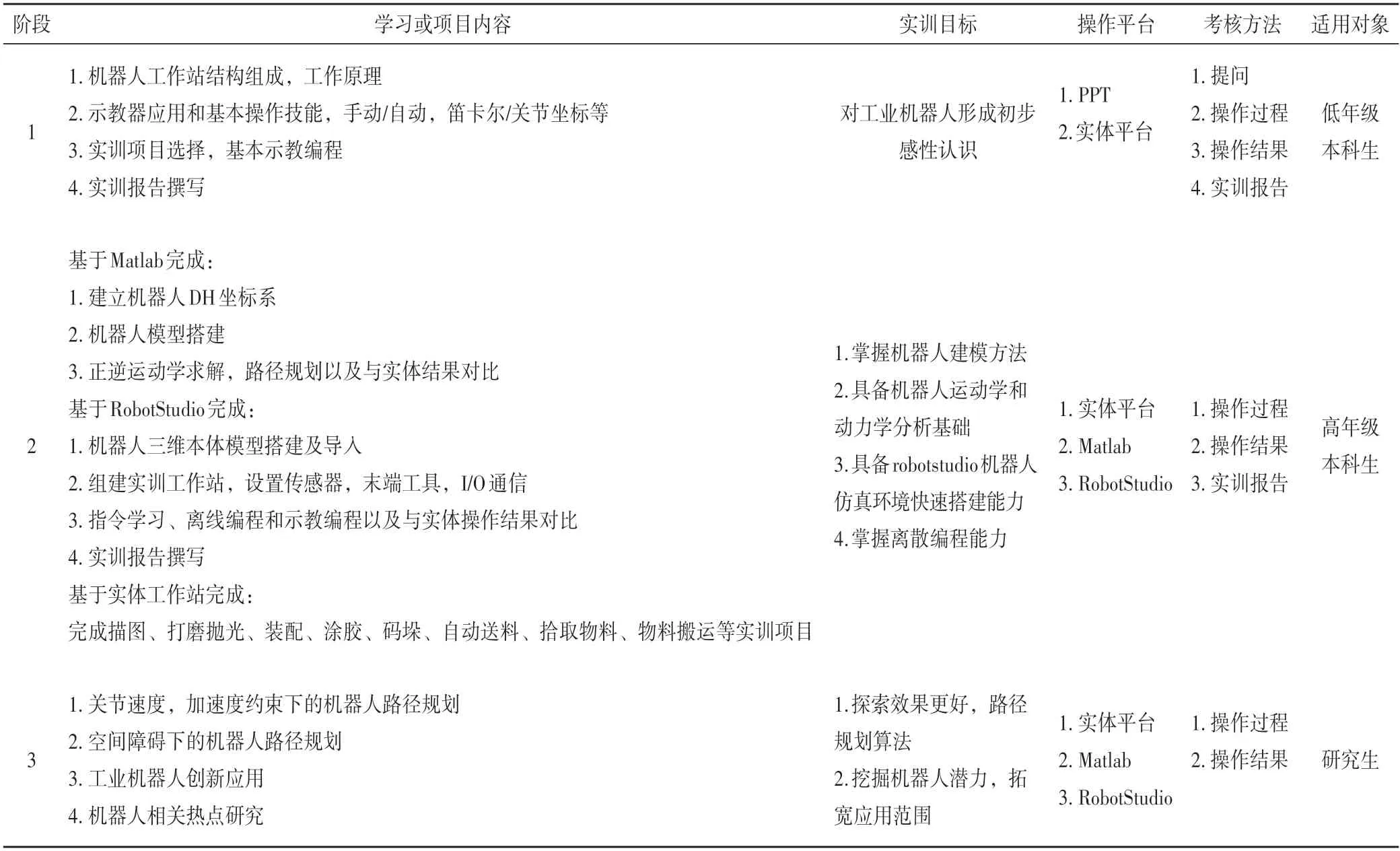
表2 實體平臺與虛擬平臺融合和應用
總的來看,采用自上而下的學習方法,從機器人的整體介紹和操作入手,可以有效地激發(fā)學生的積極性和主動性,然后結合Matlab虛擬仿真平臺,可以快速建立機器人運動學和動力學模型,避免了繁瑣的計算,快速驗證設計思想,并且運動學結果位移、速度、加速度可以映射為關節(jié)的扭矩和關節(jié)力,為關節(jié)電機選型、機械臂設計提供邊界,為將來設計機器人硬件打下基礎,結合RobotStudio虛擬仿真平臺,可以清楚了解機器人的控制邏輯和通信,低成本的驗證編程程序,為設計機器人軟件、控制系統(tǒng)的設計也打下一個很好的基礎,虛實結合的機器人平臺和教學方法克服了傳統(tǒng)教學過程中場地、時間、空間和安全的限制,可有效提升了教學效率和質量。
4 結束語
機器人不僅是國家戰(zhàn)略性新興產業(yè)之一,同時也是工科學生學習和研究的極佳載體之一,涉及機械、傳感器、控制、計算機、軟件編程等各個專業(yè)領域,傳統(tǒng)單一的教學法根本不能滿足實際機器人相關專業(yè)的培養(yǎng)要求,亟需搭建新的實踐平臺和開發(fā)研究新的教學方法,基于此目標,本文以機器人實訓為切入口,基于機器人實訓設備數量少、教學效果差等問題,提出了一種虛實結合的工業(yè)機器人實訓教學平臺和方法,包括機器人實體操作平臺和虛擬仿真平臺,機器人實體工作平臺設計多品牌、多種類機器人,包括描圖、打磨拋光、裝配、涂膠、碼垛、自動送料、拾取、物料搬運等實訓項目,虛擬工作平臺包括基于Matlab 的機器人運動學和動力學虛擬仿真,基于RobotStudio 的機器人離散編程和動畫仿真,新平臺新技術引進新的教學方法,實現(xiàn)了各個平臺優(yōu)勢互補,充分提高理論在實踐中的應用,同時也彌合了傳統(tǒng)實踐教學與理論教學的脫節(jié),每個學期累計服務師生1 000 人次,不僅大大提升教學效率和質量,同時也提升相關教師的科研專業(yè)素養(yǎng),可為相關院校工程訓練尤其是機器人教學提供參考。
未來將在此平臺基礎上繼續(xù)進行開發(fā),以實際問題為導向,繼續(xù)深挖實體平臺潛力和虛擬平臺技巧,以及平臺的擴展,如機器人視覺、激光追蹤儀等裝備,以及設計過程中機械臂的有限元仿真、散熱分析、控制邏輯仿真等,持續(xù)豐富完善新平臺進一步為更多師生服務。
猜你喜歡
甘肅教育(2020年14期)2020-09-11 07:57:50
裝備制造技術(2020年12期)2020-05-22 09:25:38
甘肅教育(2020年12期)2020-04-13 06:25:34
福建教育學院學報(2019年4期)2019-06-12 08:39:10
東方教育(2017年19期)2017-12-05 15:14:48
計算機測量與控制(2017年6期)2017-07-01 16:23:53
電子制作(2017年8期)2017-06-05 09:36:15
唐山文學(2016年2期)2017-01-15 14:03:59
新時代職業(yè)教育(2016年4期)2016-02-06 02:15:35
江蘇高職教育(2014年4期)2014-02-28 11:40:57
