遠(yuǎn)程空空導(dǎo)彈角度約束增程彈道制導(dǎo)律研究
2022-10-11 11:55:22張喜豪張金鵬
航空兵器 2022年4期
張喜豪,張金鵬, 沈 欣
(1. 中國(guó)空空導(dǎo)彈研究院,河南 洛陽(yáng) 471009; 2. 航空制導(dǎo)武器航空科技重點(diǎn)實(shí)驗(yàn)室,河南 洛陽(yáng) 471009; 3.空裝駐洛陽(yáng)地區(qū)第一軍事代表室,河南 洛陽(yáng) 471009)
0 引 言
增加射程是空空導(dǎo)彈不斷追求的一個(gè)方向,在有限尺寸重量約束下,研究如何提高空空導(dǎo)彈的攻擊距離具有重要的現(xiàn)實(shí)意義。除了從氣動(dòng)布局、 推力系統(tǒng)等方面進(jìn)行設(shè)計(jì)外,增程彈道規(guī)劃及其制導(dǎo)律技術(shù)也是實(shí)現(xiàn)增程的關(guān)鍵技術(shù)之一。彈道規(guī)劃及其制導(dǎo)律技術(shù)應(yīng)用的范圍比較廣泛,文獻(xiàn)[3]以無(wú)人機(jī)載空地導(dǎo)彈為對(duì)象,提出一種適應(yīng)復(fù)合制導(dǎo)的空地導(dǎo)彈的彈道規(guī)劃方法,提高無(wú)人機(jī)載空地導(dǎo)彈的發(fā)射距離。文獻(xiàn)[4]以高超聲速飛行器為對(duì)象,提出一種非連續(xù)點(diǎn)火助推方案,通過(guò)設(shè)計(jì)增大助推段射程,提高飛行器的射程。文獻(xiàn)[5]針對(duì)反輻射導(dǎo)彈被動(dòng)目標(biāo)定位問(wèn)題的關(guān)鍵技術(shù)研究,提出一種導(dǎo)彈可觀測(cè)性增強(qiáng)的彈道規(guī)劃方法,給出了典型非線性濾波器的選取分析。文獻(xiàn)[6]研究垂直發(fā)射的多導(dǎo)彈系統(tǒng)的高拋彈道協(xié)同制導(dǎo)律問(wèn)題,采用“初+中+末制導(dǎo)”的復(fù)合制導(dǎo)方式實(shí)現(xiàn)高拋彈道,設(shè)計(jì)中制導(dǎo)段協(xié)同導(dǎo)引律,減少協(xié)同攻擊網(wǎng)絡(luò)中各導(dǎo)彈的命中時(shí)間差。從彈道規(guī)劃技術(shù)的研究可以看出,其應(yīng)用與研究對(duì)象和研究目的密切相關(guān)。本文以空空導(dǎo)彈實(shí)現(xiàn)遠(yuǎn)程精確打擊為目的,提出一種適用于遠(yuǎn)程空空導(dǎo)彈的角度約束增程彈道規(guī)劃方案,重點(diǎn)研究中制導(dǎo)律,減少導(dǎo)彈飛行過(guò)程中的阻力,滿足中、 末制導(dǎo)交接班位置、 視線角和入射角等約束條件,達(dá)到改善彈道性能的效果。
1 角度約束增程彈道規(guī)劃方案以及制導(dǎo)律研究
遠(yuǎn)程空空導(dǎo)彈飛行距離遠(yuǎn)、 時(shí)間長(zhǎng),多采用復(fù)合制導(dǎo)系統(tǒng),典型的復(fù)合制導(dǎo)系統(tǒng)由數(shù)據(jù)鏈指令修正+捷聯(lián)式慣性中制導(dǎo)和主動(dòng)雷達(dá)末制導(dǎo)組成。數(shù)據(jù)鏈指令修正系統(tǒng)傳送載機(jī)測(cè)量的目標(biāo)信息,捷聯(lián)式慣性系統(tǒng)測(cè)量導(dǎo)彈信息,由飛控計(jì)算機(jī)將這些信息進(jìn)行綜合形成中制導(dǎo)控制指令,來(lái)控制導(dǎo)彈飛行,然后進(jìn)入中、 末制導(dǎo)交接班,以便截獲目標(biāo)。截獲目標(biāo)后用主動(dòng)雷達(dá)自尋的系統(tǒng)進(jìn)行末制導(dǎo),直至摧毀目標(biāo)。復(fù)合制導(dǎo)系統(tǒng)可以充分發(fā)揮不同制導(dǎo)段中不同制導(dǎo)技術(shù)的優(yōu)勢(shì),以滿足特定的制導(dǎo)需求。
本文在復(fù)合制導(dǎo)過(guò)程劃分的基礎(chǔ)上,將遠(yuǎn)程空空導(dǎo)彈角度約束增程彈道規(guī)劃為初始段、 爬高段、 成型段和末制導(dǎo)段。角度約束增程彈道規(guī)劃示意圖如圖1所示。初始段: 導(dǎo)彈和載機(jī)安全分離段,這里不做研究。爬高段: 利用大氣密度隨高度增加而降低的特性,導(dǎo)彈爬升到一定的高度,避開(kāi)低空稠密大氣而在阻力較小的稀薄大氣中飛行,減小飛行過(guò)程中空氣阻力。成型段: 將導(dǎo)彈制導(dǎo)到期望的中、 末交接班區(qū)域,并滿足期望的視線角和入射角約束。這里的入射角約束,是約束導(dǎo)引頭雷達(dá)天線照射目標(biāo)所發(fā)射的入射波與地面的夾角,入射角近似取彈道傾角的絕對(duì)值。末制導(dǎo)段: 導(dǎo)彈在完成中、 末制導(dǎo)交接班后進(jìn)入末制導(dǎo)。爬高段、 成型段和末制導(dǎo)段側(cè)向平面均采用最優(yōu)制導(dǎo)律,下面根據(jù)不同飛行段的需求,研究各階段縱向平面相關(guān)制導(dǎo)律實(shí)現(xiàn)問(wèn)題。
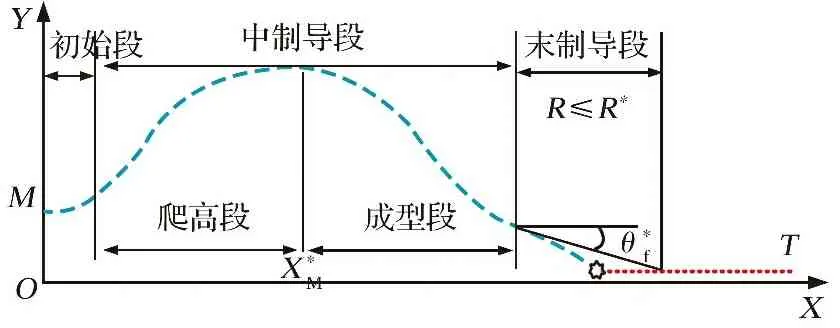
圖1 角度約束增程彈道規(guī)劃示意圖
1.1 爬高增程制導(dǎo)律
爬高增程制導(dǎo)律采用過(guò)載指令控制,控制爬高段的過(guò)載和持續(xù)時(shí)間,實(shí)現(xiàn)中制導(dǎo)階段導(dǎo)彈的爬高。在文獻(xiàn)[12]中EET-2算法的基礎(chǔ)上進(jìn)行改進(jìn),考慮導(dǎo)彈當(dāng)前速度與爬升彈道傾角、 爬升高度的關(guān)系,引入速度項(xiàng)對(duì)爬高算法進(jìn)行修正和約束控制,爬高增程制導(dǎo)律為
=(-)-+·cos
(1)
式中:為爬升最佳高度;為導(dǎo)彈當(dāng)前高度;為導(dǎo)彈當(dāng)前速度;為當(dāng)前彈道傾角;為重力加速度。
由式(1)可得,爬升段的彈道傾角變化率為
(2)
式中:-為期望高度與當(dāng)前高度的差值,當(dāng)前高度離期望高度越遠(yuǎn),爬升越快;可以近似看作當(dāng)前狀態(tài)高度的可變化量,將此項(xiàng)作為修正項(xiàng)。若當(dāng)前爬升角較大,此時(shí)不宜拉大過(guò)載,修正項(xiàng)使得爬升速率降低。爬高彈道通常初始爬升率較大然后逐漸減小,在達(dá)到期望高度取到最小值,爬高過(guò)程平穩(wěn)。
1.2 成型角度約束制導(dǎo)律
在中制導(dǎo)結(jié)束時(shí),導(dǎo)彈的位置、 速度以及航向等條件應(yīng)滿足中、 末制導(dǎo)交接班的要求。如果一直處于爬高段,則很難達(dá)到交接班要求。此外,在打擊超低空目標(biāo)時(shí),地海雜波會(huì)導(dǎo)致雷達(dá)導(dǎo)引頭測(cè)量精度下降。研究表明,當(dāng)導(dǎo)引頭入射波以布魯斯特角入射時(shí),地海雜波的反射系數(shù)最小。布魯斯特角在山地、 平原、 海洋等情況下是不同的,一般在10°~25°之間。因此,角度約束具有重要意義,故研究成型角度約束制導(dǎo)律,把中、 末制導(dǎo)交接班點(diǎn)看作虛擬目標(biāo)點(diǎn),將導(dǎo)彈制導(dǎo)到虛擬目標(biāo)點(diǎn)附近,達(dá)到期望的視線角和入射角。
導(dǎo)彈和交接班點(diǎn)相對(duì)關(guān)系如圖2所示。圖中,為導(dǎo)彈加速度;為導(dǎo)彈到虛擬目標(biāo)點(diǎn)的距離;為導(dǎo)彈當(dāng)前速度矢量和期望末速度矢量之間的角度;為當(dāng)前速度矢量和導(dǎo)彈與虛擬目標(biāo)視線之間的角度。
交接班點(diǎn)位置計(jì)算:
(3)
式中: (,,)為目標(biāo)位置信息;,分別為導(dǎo)彈期望的末端傾角和偏角;為制導(dǎo)頭截獲距離。
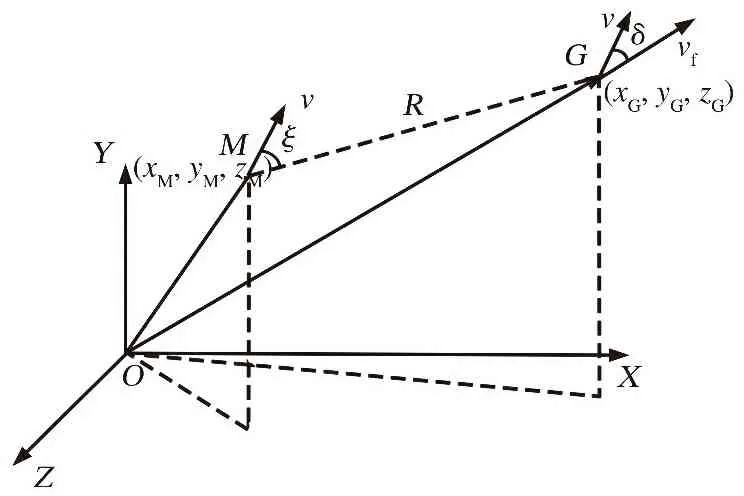
圖2 導(dǎo)彈與交接班點(diǎn)相對(duì)關(guān)系
,分別為導(dǎo)彈與交接班點(diǎn)(虛擬目標(biāo))距離和相對(duì)速度,設(shè)相對(duì)加速度為控制量,則系統(tǒng)狀態(tài)方程為

(4)
初始條件為
(5)
在此制導(dǎo)律設(shè)計(jì)中,期望整個(gè)飛行過(guò)程能量最省,并且末端彈目相對(duì)速度矢量()與末端相對(duì)位置矢量()滿足指定要求。
采用最優(yōu)控制理論得到滿足末端邊界條件的制導(dǎo)律。用軟懲罰實(shí)現(xiàn)在制導(dǎo)律設(shè)計(jì)中終端邊界條件相對(duì)重要性的權(quán)衡。將此問(wèn)題的軟懲罰定義為

(6)
式中:和為常數(shù),為末端導(dǎo)彈位置與預(yù)測(cè)交接班點(diǎn)的偏差的權(quán)重,為末端相對(duì)速度矢量與所需的終端速度矢量之前的偏差的權(quán)重。
此最優(yōu)控制問(wèn)題性能指標(biāo)可以描述為
(7)
取此問(wèn)題的哈密頓函數(shù)為

(8)
式中:和為伴隨向量。
由最優(yōu)控制理論可知,有協(xié)態(tài)方程:
(9)
且伴隨向量滿足:
(10)
(11)
將式(11)代入式(9)積分,聯(lián)立式(10),可得

()(-)
(12)
由最優(yōu)控制理論的極值條件可知,這里考慮無(wú)約束,則有取最小值的必要條件:
(13)
將式(12) 代入式(13),可得最優(yōu)開(kāi)環(huán)控制:

(14)
由相對(duì)運(yùn)動(dòng)方程可知:

(15)

(16)
設(shè)零控脫靶量為

(17)
式中:=-,為剩余飛行時(shí)間。
將式(14)代入式(15)積分,與式(17)聯(lián)立,有
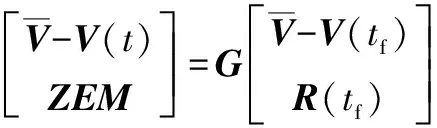
(18)
(19)

將式(18)求逆,有

(20)

(21)
將式(20)~(21)代入式(14)可得閉環(huán)最優(yōu)控制:
(22)
(23)
當(dāng)取和趨于無(wú)窮大,注意到
(24)
則有
(25)
假設(shè)目標(biāo)加速度為0,結(jié)合圖2所示的相對(duì)運(yùn)動(dòng)關(guān)系,則可以將式(22)矢量方程轉(zhuǎn)化為標(biāo)量方程:

(26)
式中:為法向加速度。
將法向加速度投影到縱向平面, 同時(shí)將式(26)中用/替換,可得成型角度約束制導(dǎo)律:

(27)
式中:為法向加速度在縱向平面的投影;為當(dāng)前位置與交接班點(diǎn)的距離;為導(dǎo)彈期望末速度方向;為相對(duì)距離矢量與導(dǎo)彈當(dāng)前速度矢量的夾角在縱向平面的投影。
1.3 末制導(dǎo)律
末制導(dǎo)采用最優(yōu)制導(dǎo)律,由導(dǎo)引頭提供目標(biāo)信息,縱向平面的制導(dǎo)律為

(28)

1.4 制導(dǎo)指令交接算法
采用復(fù)合制導(dǎo)律設(shè)計(jì),各飛行段制導(dǎo)律不同,需要考慮制導(dǎo)指令交接問(wèn)題。在交接時(shí),開(kāi)始以前一段加速度指令為主,主導(dǎo)成分逐漸減弱; 然后以后一段加速度指令為主,逐漸增強(qiáng)。優(yōu)選交接算法如下:
()=2()+[1()-2()]()
(29)
()=(′+-)′,∈[,+′]
(30)
式中:()為交接段加速度指令;1()為前一段制導(dǎo)律在時(shí)刻的加速度指令;2()為后一段制導(dǎo)律在時(shí)刻的加速度指令;()為一個(gè)調(diào)節(jié)比重的時(shí)變系數(shù);為交接段開(kāi)始時(shí)間;′為交接段持續(xù)時(shí)間。
1.5 制導(dǎo)律參數(shù)優(yōu)化


(31)
式中:(=0, 1, 2, 3)和(=0, 1, 2)為多項(xiàng)式擬合得到的系數(shù);為發(fā)射距離。
在實(shí)際應(yīng)用中,可以根據(jù)不同的發(fā)射條件通過(guò)式(31)獲得當(dāng)前情況下近似最優(yōu)的參數(shù),實(shí)現(xiàn)增程彈道。
2 仿真驗(yàn)證
以表1中的典型發(fā)射條件為例,進(jìn)行仿真驗(yàn)證,將本文提出的角度約束增程彈道與常規(guī)彈道性能對(duì)比,常規(guī)彈道全程采用最優(yōu)制導(dǎo)律。
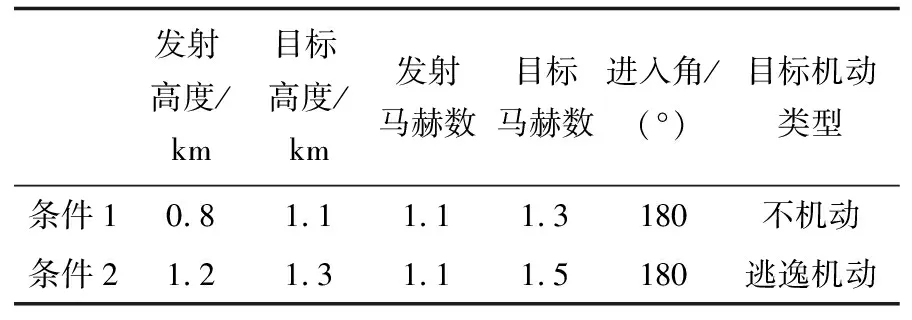
表1 仿真條件
2.1 仿真結(jié)果1
在條件1下,針對(duì)勻速運(yùn)動(dòng)目標(biāo),在不同發(fā)射距離條件下,采用粒子群優(yōu)化算法,得到的優(yōu)化彈道如圖3所示,對(duì)應(yīng)的最優(yōu)參數(shù)如表2所示。要求中制導(dǎo)末端彈道傾角約束-10°,彈目距離小于20 km,視為中制導(dǎo)結(jié)束,進(jìn)入末制導(dǎo)階段。其中雙脈沖型發(fā)動(dòng)機(jī)第一級(jí)和第二級(jí)點(diǎn)火間隔時(shí)間為12 s,=013,=004。

圖3 不同發(fā)射距離對(duì)應(yīng)的優(yōu)化彈道

表2 不同發(fā)射距離對(duì)應(yīng)的最優(yōu)參數(shù)
2.2 仿真結(jié)果2
在條件1下,針對(duì)勻速運(yùn)動(dòng)目標(biāo),發(fā)射距離70 km,要求中制導(dǎo)末端彈道傾角約束-10°,彈目距離小于20 km,視為中制導(dǎo)結(jié)束,進(jìn)入末制導(dǎo)階段。增程彈道爬高段制導(dǎo)律參數(shù):=013,=004,結(jié)果如圖4(a)~(d)所示。增程彈道和常規(guī)彈道在仿真時(shí),都采用雙脈沖型發(fā)動(dòng)機(jī),其中第一級(jí)和第二級(jí)點(diǎn)火間隔時(shí)間為12 s,速度變化對(duì)比如圖4(c)所示。增程彈道在第一級(jí)脈沖工作階段,導(dǎo)彈通過(guò)爬高將動(dòng)能轉(zhuǎn)化為勢(shì)能儲(chǔ)存,飛行速度顯著降低; 當(dāng)?shù)诙?jí)脈沖工作時(shí),導(dǎo)彈已飛到約6 km,此時(shí)點(diǎn)火可以獲得更大的速度增量,相較常規(guī)彈道,減少了在低空加速飛行期間空氣阻力引起的能量損失。

圖4 增程彈道與常規(guī)彈道性能對(duì)比
圖4(a)中點(diǎn)劃線部分為中制導(dǎo)結(jié)束時(shí)導(dǎo)彈位置與目標(biāo)位置的連線。由圖4(b)可知,增程彈道雖然在飛行距離小于2 km時(shí)阻力較大,但是通過(guò)優(yōu)化彈道,增大飛行高度,減少了中間段的阻力。從表3對(duì)比結(jié)果中可以看出,相較于常規(guī)彈道,增程彈道末速增加19.19%,增程彈道爬升高度更高,飛行距離更遠(yuǎn),平均速度更大,達(dá)到了改善彈道性能指標(biāo)的效果。
2.3 仿真結(jié)果3
在條件2下,目標(biāo)逃逸機(jī)動(dòng),加速度9.8 m/s,末速不小于350 m/s,最遠(yuǎn)距離增程彈道與最遠(yuǎn)距離常規(guī)彈道對(duì)比結(jié)果如圖5所示。其中: 末制導(dǎo)距離20 km,彈道傾角約束-10°,雙脈沖型發(fā)動(dòng)機(jī)第一級(jí)和第二級(jí)點(diǎn)火間隔時(shí)間為20 s。
表3 中制導(dǎo)階段對(duì)比
圖5 條件2下的最遠(yuǎn)射程彈道
從加速度變化曲線圖5(c)中可以看出,增程彈道在爬高段和成型段,導(dǎo)彈的需用過(guò)載較大,最大值不超過(guò)98 m/s。增程彈道中、 末制導(dǎo)交接時(shí)縱向平面視線角為-10.02°,入射角為12.18°,在末制導(dǎo)階段視線角變化范圍在-10.02°~-11.33°之間,脫靶量為0.401 m。驗(yàn)證了通過(guò)設(shè)計(jì)成型段彈道,中、 末制導(dǎo)交接時(shí),視線角和入射角能達(dá)到約束要求。規(guī)劃成型段彈道還可使得末制導(dǎo)階段視線角的變化范圍比較小,有利于中、 末制導(dǎo)交接班導(dǎo)引頭截獲目標(biāo)和末制導(dǎo)階段穩(wěn)定跟蹤。
在不同的發(fā)射條件下,末速不小于350 m/s,增程彈道和常規(guī)彈道能夠達(dá)到的最遠(yuǎn)距離對(duì)比結(jié)果如表4所示。可以看出,所提出的增程彈道及其制導(dǎo)律,相對(duì)常規(guī)彈道及其制導(dǎo)律,增程效果明顯。
表4 不同條件下的增程效果
3 結(jié) 論
本文所提出的對(duì)角度約束增程彈道分段規(guī)劃方案,將復(fù)雜的難以求解析解的角度約束增程彈道制導(dǎo)律問(wèn)題轉(zhuǎn)化為多段復(fù)合制導(dǎo)律問(wèn)題,研究滿足不同飛行段要求的制導(dǎo)律,達(dá)到實(shí)現(xiàn)增程兼角度約束的綜合最優(yōu)。角度約束增程制導(dǎo)律結(jié)構(gòu)簡(jiǎn)單,彈目制導(dǎo)信息能夠獲取或估計(jì),便于工程實(shí)現(xiàn); 爬高段彈道顯著提高了導(dǎo)彈的最大末速和平均速度,對(duì)實(shí)現(xiàn)增程效果明顯; 成型段彈道能夠?qū)崿F(xiàn)中、 末制導(dǎo)交接班視線角和入射角等約束。所提出的思路和方法對(duì)其他戰(zhàn)術(shù)導(dǎo)彈增程彈道技術(shù)的研究也有理論和工程參考價(jià)值。實(shí)際作戰(zhàn)過(guò)程中,戰(zhàn)場(chǎng)態(tài)勢(shì)更復(fù)雜,因此,需要進(jìn)一步研究導(dǎo)彈離軸發(fā)射和不同進(jìn)入角等情況對(duì)增程彈道的影響。
