基于FPGA 的循環(huán)漢明碼編譯碼器的設計與實現(xiàn)
2022-10-11 07:37:04李壯壯劉光祖孫琳琳鄒駿
電子設計工程 2022年19期
李壯壯,劉光祖,孫琳琳,鄒駿
(南京理工大學電子工程與光電技術學院,江蘇南京 210094)
數(shù)字信號在無線信道的傳輸過程中,受到信道傳輸特性不理想、干擾等多種因素的影響,碼元波形畸變,導致接收端解調判決發(fā)生錯誤,降低了通信系統(tǒng)的可靠性。當通過改變調制方式、發(fā)射功率、信道均衡等方式仍無法避免誤碼發(fā)生時,就需要利用差錯控制編碼ECC(Error Control Coding)來改善通信系統(tǒng)的質量[1-2]。
差錯控制編碼,又稱為信道編碼,即信道編碼器對傳輸?shù)男畔⒋a元按一定規(guī)則加入冗余信息(監(jiān)督碼元)[3]。信道編碼主要包括分組碼、卷積碼等。循環(huán)漢明碼屬于分組碼的一種,它不僅能夠檢測出接收信息碼字中的錯誤碼元,還能糾正一位錯誤碼元[4-5]。
一般基于二進制多項式除法器的編碼電路需要移位補零,會造成一定的編碼延時[6-7]。在譯碼時,一般的梅吉特譯碼器搜尋錯誤圖樣的時間較長,降低了數(shù)據(jù)吞吐量。基于上述兩點,對編譯碼器電路進行了改進,成功消除了編碼延時并有效降低了譯碼延時。
1 編譯碼原理
循環(huán)漢明碼不僅具有一般分組碼的特性,還具有自身的獨特性——循環(huán)性[8]。循環(huán)性指循環(huán)漢明碼任一碼字循環(huán)移位后仍為該碼中的碼字。假設信息位數(shù)為k,編碼之后的碼長為n,監(jiān)督碼元位數(shù)為r=n-k。對于r字長的監(jiān)督碼元,組合共有2r種,可以監(jiān)督的最大碼長為2r[9-10]。一個信息碼長為n的碼字可以表示為如式(1)的多項式(以下mod 均表示模):

循環(huán)移位i次的結果為:

由循環(huán)碼的性質知,經(jīng)過式(2)模xn+1 計算得到的碼字也為此碼中的碼字[11]。
一般的循環(huán)漢明碼編碼步驟分為兩步:
1)計算并選擇生成多項式g(x)。g(x)為xn+1 的因式,且g(x)的最高次冪為n-k[12]。
2)利用g(x) 對信息序列進行編碼。假設信息多項式為m(x),最高次冪為k-1,編碼之后的多項式為:

由于所有的碼字多項式均可以被g(x)整除,所以A(x)≡0(modg(x)),即:

要使上式成立,需要滿足:

因為若xn-km(x)modg(x)≡r(x) 恒成立,二者模2之和必恒為0。
循環(huán)漢明碼譯碼方法種類較多,比如最大似然譯碼法[13-14]、梅吉特譯碼法[15]等。該次選擇了較為實用且相對簡單的梅吉特譯碼法,譯碼原理如下:
1)計算第n位碼元(最高位)發(fā)生錯誤時的伴隨式。設發(fā)送碼字為A(x),最高位發(fā)生錯誤時的接收碼字為:

伴隨式為:

即:

2)若第n-1 位發(fā)生錯誤,伴隨式為:

因為:

乘上x即左移一位,確定錯誤碼元位置為次高位。
3)以此類推,若錯誤發(fā)生在第n-i位,伴隨式為:

因為:

乘上xi即左移i位,確定錯誤碼元位置為n-i。
2 編譯碼器設計
2.1 編碼器設計
根據(jù)上述的編碼原理,硬件實現(xiàn)時需要用到多項式除法電路。二進制多項式除法器可以由線性反饋移位寄存器實現(xiàn)。根據(jù)式(5),編碼器的實現(xiàn)結構如下:
利用圖1 結構進行編碼時,將所有信息碼元輸入編碼器后還需進行n-k次移位才能得到編碼結果。此編碼結構有一定缺點,因為需要額外移位n-k次,會產生n-k個時鐘延時。在硬件實現(xiàn)時,由于編碼延時的存在,若要保證編碼后的數(shù)據(jù)連續(xù)送入下一處理模塊,需將原始碼元緩存,得到監(jiān)督碼元后一并輸出。

圖1 補零編碼結構
基于上述缺點,此次采用一種改進的編碼方式,消除了上述編碼器移位造成的輸出延遲。數(shù)學原理推導如下:
設被除多項式為B(x)=xn-km(x),其中:

余式r(x)≡B(x)modg(x),即:

對于xn-k+1modg(x)有如下關系:

根據(jù)式(15)對r(x)表達式進行重寫:


①上式中g(x)最高次冪為n-k,B(x)的最低次冪為n-k,將式(17)中ak-1xn-k與g(x)相除,得到最高次冪為n-k-1的余式。
②將①中余式與x相乘,最高次冪變?yōu)閚-k,然后與ak-2xn-k進行模2 加,并將結果與g(x)相除,得到新的最高次冪為n-k-1的余式,重復上述步驟最后得到的余式系數(shù)即為監(jiān)督碼元。
根據(jù)式(17),編碼器的實現(xiàn)結構如圖2 所示。

圖2 無延遲編碼結構
2.2 譯碼器設計
梅吉特譯碼器的譯碼原理是基于錯誤圖樣識別,對于不同的錯誤圖樣,伴隨式不同,通過識別不同的伴隨式確定錯誤碼元位置[16]。
譯碼步驟如下:
1)使用生成多項式g(x) 整除接收多項式R(x),求出伴隨式r(x)。
2)判斷伴隨式系數(shù)是否全為0,若全為0,無誤碼,若不全為0,有誤碼。有誤碼時,將計算得到的伴隨式與本地保存的伴隨式進行比對,若兩者相同,可確定錯誤碼元位置,若不同,執(zhí)行步驟3)。
3)對伴隨式左移一位,繼續(xù)除以g(x)求伴隨式并與本地伴隨式比對,若相同,通過移位的次數(shù)確定錯誤碼元位置,若不相同,重復步驟3),直到計算出的伴隨式與本地伴隨式相同為止。
在上述梅吉特譯碼方式基礎上,額外添加一個檢測伴隨式,會極大降低譯碼時間。譯碼器電路結構主要包含:數(shù)據(jù)緩沖糾錯電路、伴隨式計算電路、錯誤圖樣識別電路、糾錯選擇電路。其結構如圖3所示。

圖3 改進后的譯碼器結構
為計算添加一個伴隨式識別電路對譯碼時間的影響,設接收碼元長度為n,添加的伴隨式對應的錯誤碼元位置為:

[·]為向下取整,設(n,k)循環(huán)漢明碼每次錯誤一個碼元,且不同位置上的碼元錯誤可能性相同,即每個碼元錯誤概率P(x)=,僅采用最高位碼元對應的伴隨式作為檢測目標的平均移位次數(shù)為:

采用上述改進后譯碼方式的平均移位次數(shù)約為:
由上可知,譯碼延時降低約為一半。
3 編譯碼器的FPGA實現(xiàn)
此次對循環(huán)漢明碼(255,247)的截短碼(152,144)進行仿真驗證,生成多項式選擇435(435 為八進制表示,100011101,左側為多項式最高位)。截短循環(huán)漢明碼的編譯碼方式與一般循環(huán)漢明碼的編譯碼方式完全相同,唯一的不同在于編譯碼的有效碼元數(shù)目不同。
3.1 編碼器的實現(xiàn)
編碼器結構主要借助圖2 編碼電路及圖4 的狀態(tài)機得以實現(xiàn)。

圖4 編碼器狀態(tài)轉移圖
S_IDLE:完成編碼前的準備工作,包括將余式寄存器及編碼計數(shù)器清零、檢測數(shù)據(jù)有效標志的邊沿等操作。
S_CODE:完成數(shù)據(jù)碼元的編碼。
S_FINISH:完成監(jiān)督碼元輸出。在編碼完成之后,將監(jiān)督位依次輸出。
3.2 譯碼器的實現(xiàn)
譯碼器主要借助圖3 中譯碼電路和圖5 譯碼流程圖得以實現(xiàn)。

圖5 譯碼器實現(xiàn)流程圖
伴隨式計算:完成接收多項式與生成多項式的相除,求解伴隨式。
伴隨式判斷:若計算求得的伴隨式系數(shù)全為0,數(shù)據(jù)無誤碼,可將去除監(jiān)督碼元后的數(shù)據(jù)輸出。若伴隨式系數(shù)不全為0,表明數(shù)據(jù)有誤碼。
錯誤圖樣識別:完成定位錯誤碼元位置。將本地伴隨式與當前計算出的伴隨式比對,若兩者一致,誤碼位置即可定位,若不一致,繼續(xù)將伴隨式移位與g(x)相除求解新的伴隨式。
編碼器電路綜合后原理圖、資源圖分別如圖6和圖7 所示,其占用資源如表1 所示。

圖6 編碼器綜合后原理圖

圖7 編碼器綜合后資源

表1 編碼器占用資源
改進前后譯碼器資源利用圖分別如圖8 和圖9(由于譯碼器原理圖過于復雜,未列出)。

圖8 改進前譯碼器綜合后資源
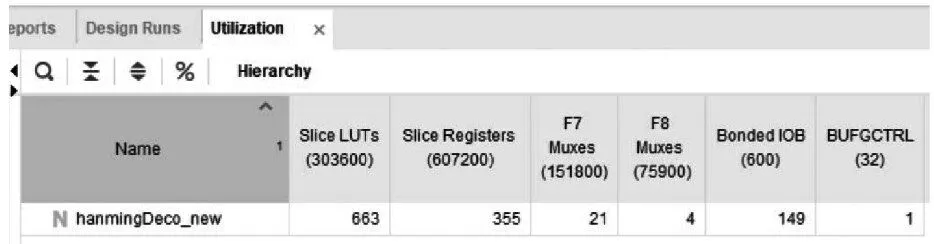
圖9 改進后譯碼器綜合后資源
圖8 對應只有一個錯誤圖樣的譯碼資源利用率,圖9 中對應有兩個錯誤圖樣的譯碼資源利用率。綜合兩圖,改進后譯碼器的資源使用與改進前的相比,LUTs 增加了83 個,寄存器增加了一個。表2中為譯碼器改進前后占用資源數(shù)量

表2 譯碼器占用資源
4 編譯碼的仿真結果
圖10-13 為兩組不同數(shù)據(jù)的編譯碼仿真圖。此次仿真,時鐘頻率為80 MHz,周期為12.5 ns。對于編譯碼器1,編碼過程(第一個數(shù)據(jù)碼元開始進入到最后一個碼元輸出)消耗時鐘數(shù)目為153(碼元輸出占用152,外加一個時鐘的數(shù)據(jù)延遲)。可知改進后的編碼器相較于一般補零編碼器,已經(jīng)消除了補零帶來的延遲。

圖10 編碼器仿真1
為了驗證增加一個檢測伴隨式帶來的優(yōu)勢,實驗中兩個譯碼器中錯誤碼字位置有所不同(最低位為0,最高位為151)。對于改進的譯碼器,該文設置了兩個檢測伴隨式,一個對應最高位(151),一個對應中間位(76)。譯碼器仿真1 中碼元錯誤位置設置為120,譯碼器仿真2 中碼元錯誤位置設置為17。譯碼器仿真圖中依次從下向上,1-4 行對應兩個檢測伴隨式的譯碼器輸出,5-8 行對應一個檢測伴隨式的譯碼器輸出。
觀察圖11 可知,改進后與改進前譯碼器錯誤位置指示變量i最終都定位在32,錯誤位置為120(152-32=120)。對于改進后的譯碼器,若錯誤位置落在151~77 之間,譯碼時間未改變。觀察圖13,改進后的譯碼器的位置指示變量i為60,錯誤位置為17(77-60=17),而改進前的譯碼器位置指示變量為135,錯誤位置為17(152-135=17),但對比二者的譯碼時間,改進后譯碼器比改進前譯碼時間減少937.5 ns[理論值(135-60)×12.5=937.5 ns]。
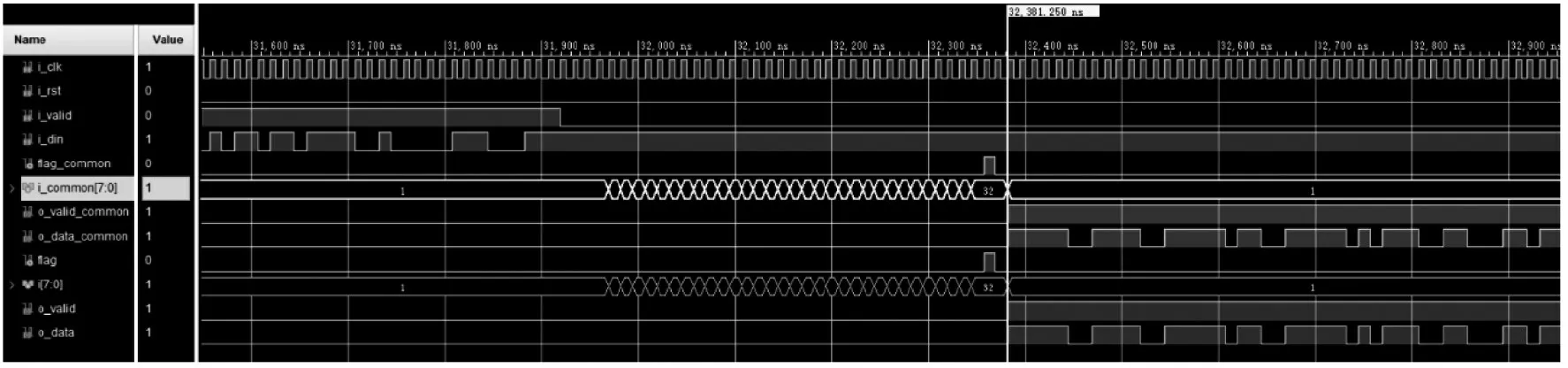
圖11 譯碼器仿真1

圖12 編碼器仿真2

圖13 譯碼器仿真2
以此類推,也可以嘗試加入更多的檢測伴隨式,將譯碼的時間縮小更多,該文篇幅有限,不再贅述。
5 結束語
使用Verilog HDL 硬件描述語言對(152,144)截短循環(huán)漢明碼編譯碼器進行了仿真,驗證了一種無延遲編碼方式,并對其數(shù)學原理進行了推導。由于在筆者參與的某衛(wèi)星通信項目中對循環(huán)漢明碼譯碼時間要求較高,所以對梅吉特譯碼器做出了一定改進,通過增加檢測伴隨式有效降低了譯碼延時,硬件資源增加較少,滿足了項目對譯碼時間及資源利用率的要求。同時驗證了改進后編譯碼器的正確性和可靠性,具有很高的使用價值和指導意義。
