基于ABMS的對地攻擊型無人機體系貢獻率評估
2022-10-12 11:42:44劉文金裴揚葛玉雪艾俊強
航空學報 2022年9期
劉文金,裴揚,2,葛玉雪,2,*,艾俊強
1. 西北工業大學 航空學院,西安 710072 2. 飛行器體系貢獻度與綜合設計工業和信息化部重點實驗室,西安 710072 3. 中國航空工業集團公司 第一飛機設計研究院,西安 710089
對地攻擊型無人機可執行戰場偵察、防空壓制、對地攻擊等任務,具有成本低、零傷亡等優勢,在現代戰場中發揮著重要作用。為此,以往學者對無人機的作戰效能評估開展了較多研究工作。而隨著現代戰爭的體系化發展,以單一型號作戰能力為核心的效能評估方法已無法滿足體系作戰需求,必須要從體系的角度出發結合具體的作戰任務,評估其對體系的貢獻率。因此,在效能評估的基礎上,建立一種適用于對地攻擊型無人機的體系貢獻率評估方法具有重要意義。
在現有的體系貢獻率評估方法中,主要有解析法和仿真法2種。解析法主要關注能力指標,受主觀影響大且沒有充分考慮具體作戰任務中作戰對手、作戰環境、作戰策略等因素的影響。而仿真方法受主觀影響小,可對上述因素進行詳細研究。其中,基于Agent的建模與仿真(Agent Based Modeling and Simulation, ABMS)方法可以有效描述作戰實體的自主性、反應性、交互性等特性,通過自底向上的方式描述復雜系統的演化過程,在飛機作戰效能評估和方案論證中已得到廣泛應用。文獻[6]使用ABMS分析飛機對綜合防空系統進行突防并打擊高價值目標的任務效能,以此為基礎進行飛機參數的權衡設計。文獻[7]將ABMS用于多無人機海域監視的任務效能分析。文獻[8]將ABMS與復雜網絡模型相結合,評估多無人機系統的指揮控制效能。文獻[9]采用ABMS實現了使用機載激光武器在轟炸機突防任務中防御來襲導彈的動態過程的仿真并進行了效能分析。文獻[10]采用條件-動作規則描述Agent行為,對無人機集群偵察和搜救任務進行了建模和仿真。文獻[11-12]采用有限狀態機描述Agent行為,研究無人機搜救、突防攻擊等作戰仿真。文獻[13]使用ABMS進行戰斗機突防作戰效能仿真并開展指標論證研究。
以往學者使用ABMS方法開展的相關研究存在以下問題,首先在Agent行為機制方面,大都采用定制化的單一行為機制,缺乏通用性;其次,在Agent模型結構方面,大多采用模塊化的構建方法,通過不同模塊組合為不同的系統,但對無人機在體系對抗中的生存力考慮較少,而無人機的生存力直接決定了能否遂行既定的作戰任務,進而影響體系作戰效能;再次,在評估指標體系方面,以往研究大多從無人機本身的特性出發并以單一的作戰結果作為評價標準,沒有從作戰體系的角度出發,無法充分反映無人機在體系中的定位及其在作戰過程中發揮的具體作用。
針對上述問題,本文提出一種基于ABMS體系貢獻率評估方法并對對地攻擊型無人機進行體系貢獻率評估。首先提出ABMS的體系貢獻率評估框架,對評估過程進行分析;然后根據Agent的行為特性建立無人機Agent復合行為模型;通過分析無人機在作戰過程承擔的任務和無人機的基本特性,提出模塊可組合的無人機Agent功能模型并對典型模塊進行建模;從作戰效果、效率和代價3個方面綜合考慮,提出評價作戰體系效能的指標并給出體系貢獻率計算方法。
1 基于ABMS的體系貢獻率評估框架
無人機作為一種典型的武器裝備,其體系貢獻率評估遵循一般武器裝備的評估過程。采用ABMS方法對裝備進行體系貢獻率評估以任務需求為導向,將裝備參數、裝備編成等作戰要素作為輸入,然后進行建模與仿真,最后確定評估指標并進行計算和分析,其框架如圖1所示,具體流程如下:
將待評裝備的作戰使命分解為具體的作戰任務。
根據具體的作戰任務,明確作戰裝備、作戰流程、作戰環境、作戰目標等要素。
建立作戰仿真模型,包括雙方的Agent 模型集、Agent指令集、仿真環境、終止條件等要素。
確定待評裝備的評估指標體系和體系貢獻率率計算方法
進行仿真實驗,對待評裝備體系貢獻率進行評估。

圖1 評估框架Fig.1 Evaluation framework
2 Agent模型結構
2.1 Agent概念
Agent的概念源于分布式人工智能,已被廣泛應用于體系作戰建模與仿真中。Agent具有自主性、反應性、交互性等特點,可通過感知器獲取環境信息及與其他智能體進行通信,可按照預定的規則或自主學習演化的規則進行特定行為,如圖2所示。基于Agent的作戰建模與仿真的核心思想是通過自底向上的建模,克服體系對抗這類復雜系統中難以分析的非線性、涌現性、交互性等特點、對現實中的作戰過程進行有效描述。

圖2 Agent概念模型Fig.2 Conceptual model of Agent
2.2 Agent模型框架
基于ABMS方法的核心是對Agent模型的構建,Agent模型是裝備實體在仿真環境中的模擬,要反映裝備的物理特性、功能特性和行為特性等。在體系作戰仿真中,Agent模型還應體現其在作戰體系中如何發揮作用。為此本文提出從行為層、功能層、參數層3個層次構建分層模塊化Agent模型,如圖3所示。其中參數層為功能層中各種任務功能和基礎功能的實現提供支持,功能層為行為層的各種行為的實現提供支持。分層模塊化Agent模型的參數層包含Agent本體的所有參數和獲取的外界參數信息。功能層包含運動模塊、通信模塊、生存力模塊組成的基本功能模型和偵察模塊、決策模塊、攻擊模塊組成的任務功能模型。行為層以對外界環境的感知、規劃、行動構成的循環過程作為總體的運行邏輯。

圖3 Agent模型框架Fig.3 Framework model of Agent
分層模塊化Agent模型具有較強的通用性,可根據研究需要建立不同智能水平的行為模型,不同精細度的功能模型。
3 無人機Agent模型
建立無人機Agent的模型如圖4所示,行為層使用有限狀態機構建,功能層包含偵察模塊、決策模塊、攻擊模塊、運動模塊、通信模塊和生存力模塊。

圖4 無人機Agent模型結構Fig.4 Model structure of UCAV Agent
3.1 無人機Agent行為模型
任務開始時,無人機按初始任務規劃前往任務區域,到達任務區域后,感知狀態機開始工作,首先使用可見光偵察設備對防空系統進行搜索,使用雷達告警設備實時感知威脅,當發現敵方地面防空系統或感知到威脅時,向規劃狀態機上報目標或威脅信息。
規劃狀態機通過通信模型接收目標或威脅信息,通過目標識別模型確認目標后,進行任務規劃,包括任務分配和路線規劃,若確認為威脅則準備進行威脅規避,規劃完成后形成行動指令通過通信模型下發給行動狀態機。
行動狀態機通過通信模型接收感知狀態機下發的指令信息,若無人機遭受攻擊,則通過易損性模型判斷當前無人機Agent能否繼續執行指令,若可執行則調用飛行控制模型按規劃的航路進行運動,滿足攻擊條件時調用導彈模型對目標進行攻擊,導彈命中目標后使用目標毀傷模型計算對目標的毀傷情況。
3.2 無人機Agent功能模型
無人機Agent功能模型主要對偵察、決策、攻擊和生存力模塊進行構建。運動和通信模塊較為簡單,其中無人機Agent的運動模塊采用3自由度質點動力學模型進行構建,使用指令過載控制無人機Agent的運動;通信模塊中無人機和地面站之間使用數據鏈進行通信,假設通信距離足夠遠,傳輸成功率為100%,帶寬足夠大,時延為零,不受干擾。通信模塊包含發送信息和接收信息2部分功能。
3.2.1 無人機偵察模塊
無人機偵察模塊采用可見光偵察模型,可見光偵察模型對應于集成在光電吊艙上的可見光CCD相機。在搜索目標時,先采用寬視場進行大范圍搜索,發現疑似目標時,調整焦距利用窄視場獲取更高分辨率的目標信息。可見光傳感器的視場(Field of View, FOV)范圍通常用水平視場角和垂直視場角描述:

(1)

(2)
式中:為成像元件的寬度;為成像元件的高度;為焦距。
通常,傳感器可通過光電轉塔的方位轉動和俯仰轉動擴大偵察范圍,偵察模塊可觀測到的范圍稱為觀測場(Field of Regard, FOR),通常方位轉動范圍為×360°連續范圍,因此本文假設偵察模塊的觀測場為一圓形范圍,傳感器以一定速率在圓形范圍內覆蓋掃描,當目標處于觀測場范圍內時,其信息將被傳感器獲取,如圖5所示。

圖5 無人機探測目標過程Fig.5 Process of UCAV detecting target
3.2.2 無人機決策模塊
無人機決策模塊包含目標識別、任務分配、威脅規避3個模型。
目標識別模型為通過目標影像信息判斷是否為敵目標,在作戰中對目標的確認過程一般如下,由無人機的傳感器獲取目標影像信息后,通過數據鏈傳回地面站,再由無人機操作員和指揮官進行判斷。對于人工目標識別,Johnson提出了估算目標識別概率的經驗模型,即Johnson準則,該準則基于工程實踐,其計算公式為

(3)
式中:為穿過目標特征尺寸的可分辨周期對數;為50%識別概率所需的可分辨周期對數,由表1給出。可由目標特征尺寸和傳感器地面采樣間距計算得出:

(4)

(5)

(6)
式中:為目標在傳感器上的投影的特征尺寸;為傳感器焦平面陣列分辨率;為真實目標的特征尺寸;為光學系統的焦距;為目標與光電傳感器之間的距離;和分別為攝像機觀測方向上目標寬度和高度。本文對目標的識別過程從目標進入傳感器的最大觀測范圍開始,先計算“觀測”等級的識別概率,當概率大于90%時進入下一等級,直到“確認”等級的識別概率大于90%時認為識別出目標。
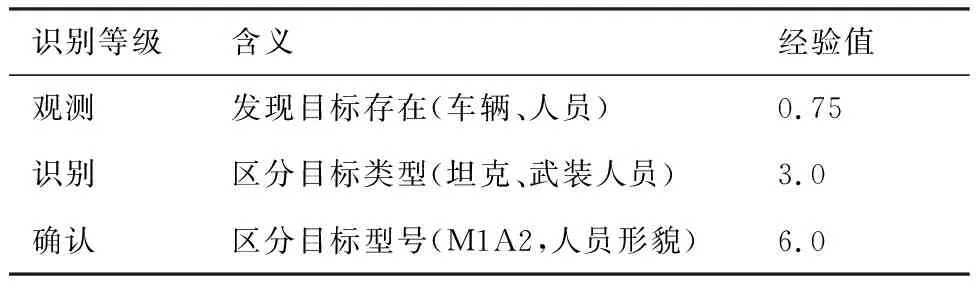
表 1 對應不同識別等級的N50的經驗值[16]
任務分配和威脅規避均采用確定性的決策方法,決策邏輯如圖6所示。任務分配決策邏輯為:首先確認目標的信息,包括目標的類型、狀態和坐標。不同的目標類型需要選擇不同的打擊武器,如反輻射導彈可以打擊雷達目標,但通常不能用于打擊地面裝甲目標。目標狀態包括未被攻擊、正在被攻擊、被摧毀3種狀態。當目標處于未被攻擊的狀態時,判斷本機是否有適用于打擊該類型目標的武器,若是則建立攻擊航線并給導彈裝訂發射參數。

圖6 任務分配和威脅規避邏輯Fig.6 Logic of task assignment and threat evasion
威脅規避決策邏輯為:無人機在保證自身生存的前提下才能對敵方目標進行偵察打擊,因此設置為優先規避威脅。收到威脅信息后,先確認威脅信息,包括威脅的距離、方位和速度,然后按無人機與來襲威脅的相對速度方向生成規避航向,無人機轉向規避航向進行威脅規避。
3.2.3 無人機攻擊模塊
無人機使用的攻擊武器為空對地導彈,采用質點運動模型,發射后按比例導引以一定速度向目標飛行,滿足引信啟動條件時起爆。考慮導彈的射程、飛行速度、圓概率誤差(Circular Error Probability,CEP),對目標的殺傷半徑4個因素。單發空地導彈對目標的殺傷概率為
=
(7)
式中:為空地導彈的命中概率;為空地導彈命中目標后對目標的毀傷概率。對于矩形目標,單發導彈的命中概率可由導彈的CEP計算得到:

(8)
=0849 3CEP
(9)
式中:、分別為矩形目標的邊長。
空地導彈對某一類型目標的毀傷概率計算較為復雜,可通過毀傷試驗、建立目標易損性模型進行毀傷仿真等方法得到精確的毀傷概率表,本文用殺傷半徑計算對目標的毀傷概率:

(10)
式中:為命中點與目標的距離;為空地導彈對該目標的殺傷半徑。
3.2.4 無人機生存力模塊
無人機生存力模塊包含易損性模型和敏感性模型2部分。
易損性是指無人機不能承受損傷機理一次或多次打擊的程度,是指在被敵方火力擊中時傾向于嚴重損失和毀壞的程度,通常用無人機被威脅命中后損傷的概率表征。易損性與無人機的外形、系統和結構參數,不同殺傷等級下的損傷模式等多重因素有關,本文直接給出地空導彈對此無人機的毀傷概率。
敏感性是指無人機被威脅命中的可能性,通常用無人機被威脅機理命中的概率表征。無人機的敏感性與多重因素相關,可表示為
=
(11)
式中:為無人機被防空系統探測的概率;為無人機被防空系統識別、跟蹤及瞄準的概率;為防空系統中裝備的地空導彈成功發射的概率;為地空導彈發射后命中飛機或戰斗部在飛機附近爆炸后殺傷機理命中飛機的概率。本文假設和的值均為1,只考慮飛機的雷達隱身性能即雷達散射截面積(Radar Cross Section, RCS)水平對的影響,以及機載雷達告警設備和無人機運動對的影響,其中雷達告警接收機的頻段覆蓋防空體系雷達信號頻段且具備全向告警能力。
4 防空系統Agent模型
建立防空系統Agent的模型如圖7所示,模型分為行為層、功能層和物理層。行為層的行為邏輯與無人機Agent相同,功能層包含偵察、決策、攻擊、通信、生存力模塊。

圖7 防空系統Agent模型結構Fig.7 Model structure of ADS(Air Defense System) Agent
4.1 防空系統Agent行為模型
任務開始時,感知狀態機開始工作,首先通過雷達視距模型判斷目標是否在雷達視距范圍內,若在視距范圍內則使用雷達探測模型計算對目標的檢測概率,當檢測概率大于90%時則探測到目標,當連續5次檢測中有3次檢測到目標時認為雷達成功捕獲目標,此時將目標信息上報給規劃狀態機。
規劃狀態機通過通信模型接收目標信息,通過敵我識別模型確認目標后,進行攔截任務規劃,包括對威脅進行攔截的任務分配和攔截策略的制定,規劃完成后形成行動指令通過通信模型下發給行動狀態機。
行動狀態機通過通信模型接收感知狀態機下發的指令信息,若當前防空系統Agent遭受了空地導彈攻擊,則通過易損性模型判斷當前防空系統Agent能否繼續執行指令,若可執行則判斷是否滿足導彈發射條件,滿足發射條件時則發射地空導彈對目標進行攻擊,調用地空導彈導引和運動模型對飛行過程進行仿真,當導彈命中無人機目標后使用目標毀傷模型計算對目標的毀傷情況。
4.2 防空系統Agent功能模型
由于防空系統的位置固定,不再建立運動模型,其通信、攻擊、生存力模型的建模方法與無人機對應的模型相似,不再贅述。建立防空系統的偵察和決策模塊的模型如下。
4.2.1 防空系統偵察模塊
防空系統偵察模塊使用雷達視距模型和雷達探測概率模型。
由于地球曲率的存在,當目標處于雷達視距內時,目標才可被雷達探測到。雷達視距的計算公式為

(12)
式中:為防空系統雷達高度,為目標高度。
雷達探測模型中采用單元平均恒虛警(Cell Averaging Constant False Alarm Rate, CA-CFAR)處理方式計算雷達探測概率,雷達探測概率是信噪比(Singal Noise Ratio,SNR)和虛警概率的函數。對于確定的雷達系統,在只有目標的RCS和距離參數發生變化,其余參數都不變的情況下,其對RCS為、距離為的目標探測的信噪比為SNR,則其對RCS為、距離為的目標探測的信噪比SNR為

(13)
無干擾時,雷達對目標的探測概率為

(14)

(15)
式中:為恒虛警處理常數;為參考單元個數;為虛警概率。
4.2.2 防空系統決策模塊
防空系統決策模塊包括威脅分配模型和攔截策略模型,均采用確定性決策邏輯,如圖8所示。首先確認目標信息,包括目標距離、方位、速度,然后根據目標的距離進行排序,距離近的目標優先級高。排序完成后檢測攔截武器數量,若仍有攔截武器,則裝訂攔截武器發射參數。
攔截策略采用一對一“攔截-評估-攔截”的策略,即首先發射一枚導彈進行攔截,若導彈成功摧毀無人機,則攔截結束;若未能摧毀無人機,則再次發射一枚導彈進行攔截直到無人機被摧毀。

圖8 威脅分配邏輯Fig.8 Logic of threat assignment
5 體系貢獻率評估
5.1 體系效能評估指標
本文分別從作戰過程和作戰結果的角度提出作戰體系效能評估指標.從作戰過程的角度,在體系對抗過程中,根據“快速OODA(Observe、Orient、Decide、Act)循環”的思想,更快地完成“觀察-判斷-決策-行動”過程,并通過毀傷、干擾、欺騙等手段延緩敵方的OODA循環可以有效增加我方的作戰優勢,提高作戰效能。從作戰結果的角度,能否及時偵察到敵方目標并對其進行有效的打擊和毀傷是衡量我方作戰體系效能的根本依據。同時,作戰雙方的武器裝備是有限的,我方在打擊敵方目標時應盡量減少我方的武器資源消耗。因此,本文的體系效能評估指標主要考慮3點因素:作戰效果、作戰效率和作戰代價,具體指標如圖9所示。

圖9 效能指標Fig.9 Effectiveness index
作戰效果用目標摧毀率來衡量,即作戰結束時摧毀的目標數量與目標初始數量的比值,進攻方的目標摧毀率可表述為

(16)
式中:為防御方初始時裝備總數量;為作戰結束時防御方的裝備總數量。
作戰效率用摧毀目標平均效率來衡量,即完成對目標的偵察、決策、攻擊、摧毀這一過程的耗時情況,進攻方的摧毀目標平均效率可表述為
=××
(17)
式中:為偵察過程效率值;為決策過程效率值;為打擊過程效率值。每個過程的效率值可用絕對或相對計算方法得到,絕對效率值可表述為

(18)
式中:為專家評定的每個作戰過程的標準耗時;為每個作戰過程的實際耗時。相對效率值可通過設置不同實驗點,多次仿真獲取不同作戰參數下的作戰過程耗時情況后,采用極差歸一化方法獲得。由于耗時為成本型指標,故相對效率值可表述為

(19)

作戰代價用任務生存率來衡量,即作戰結束時裝備存活數量與投入作戰的裝備總數量的比值,進攻方的任務生存率可表述為

(20)
式中:為進攻方初始時裝備總數量;為作戰結束時進攻方的裝備剩余數量。
作戰體系效能為上述3個指標的聚合值,計算方法為

(21)
5.2 體系貢獻率計算方法
對于武器裝備的體系貢獻率計算,一般采用在作戰體系中增加待評裝備,或用待評裝備替換同類裝備前后比較作戰體系效能差異的方法,按式(22)計算體系貢獻率:
(22)
式中:為包含裝備(或使用裝備替換同類型裝備)的作戰體系效能值;′為不包含裝備(或使用同類型裝備)的體系作戰效能值。
6 實例分析
為驗證本文方法的合理性和有效性,本節以對地攻擊型無人機組成的作戰體系執行對地偵察和打擊任務為例,評估該作戰任務下高隱身性和高速度機型的體系貢獻率,作戰場景如圖10所示。作戰過程為,無人機編隊從基地起飛,沿突防路線前往任務區域,到達任務區域后,將任務區域按面積平均分配給單架無人機,無人機按掃描法進行航路規劃,執行預定的偵察和對地攻擊任務。在任務區域內隨機位置設置防空系統,防空系統可對防區內的無人機進行攔截。當無人機被全部摧毀、敵方目標被全部摧毀、無人機完成區域搜索3個條件中任意一個達成時任務結束。

圖10 無人機空地作戰場景Fig.10 UAV air-to-ground mission scenario
本文使用Anylogic開發平臺進行對地攻擊型無人機空地作戰的Agent仿真系統開發,仿真演示界面如圖11所示,根據無人機Agent模型和防空系統Agent模型在開發平臺中構建相應的Agent如圖12和圖13所示,其中行為層中的感知、規劃、行動使用有限狀態機搭建,功能層中的各個模塊使用函數搭建。
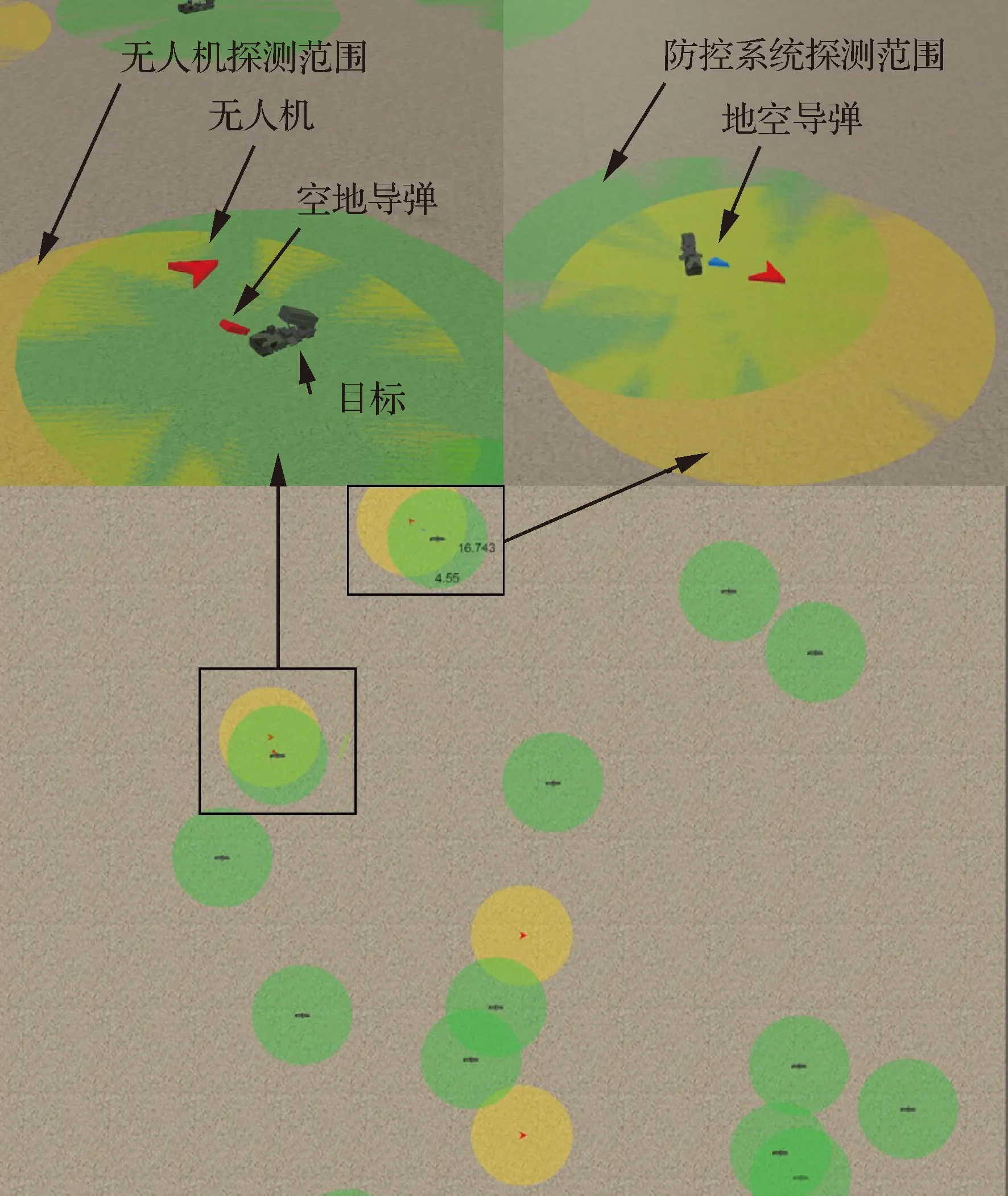
圖11 使用Anylogic建立的仿真界面Fig.11 Simulation interface with Anylogic
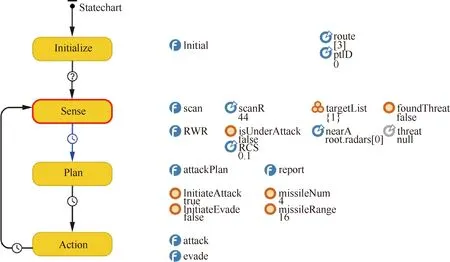
圖12 無人機Agent模型Fig.12 UAV Agent model
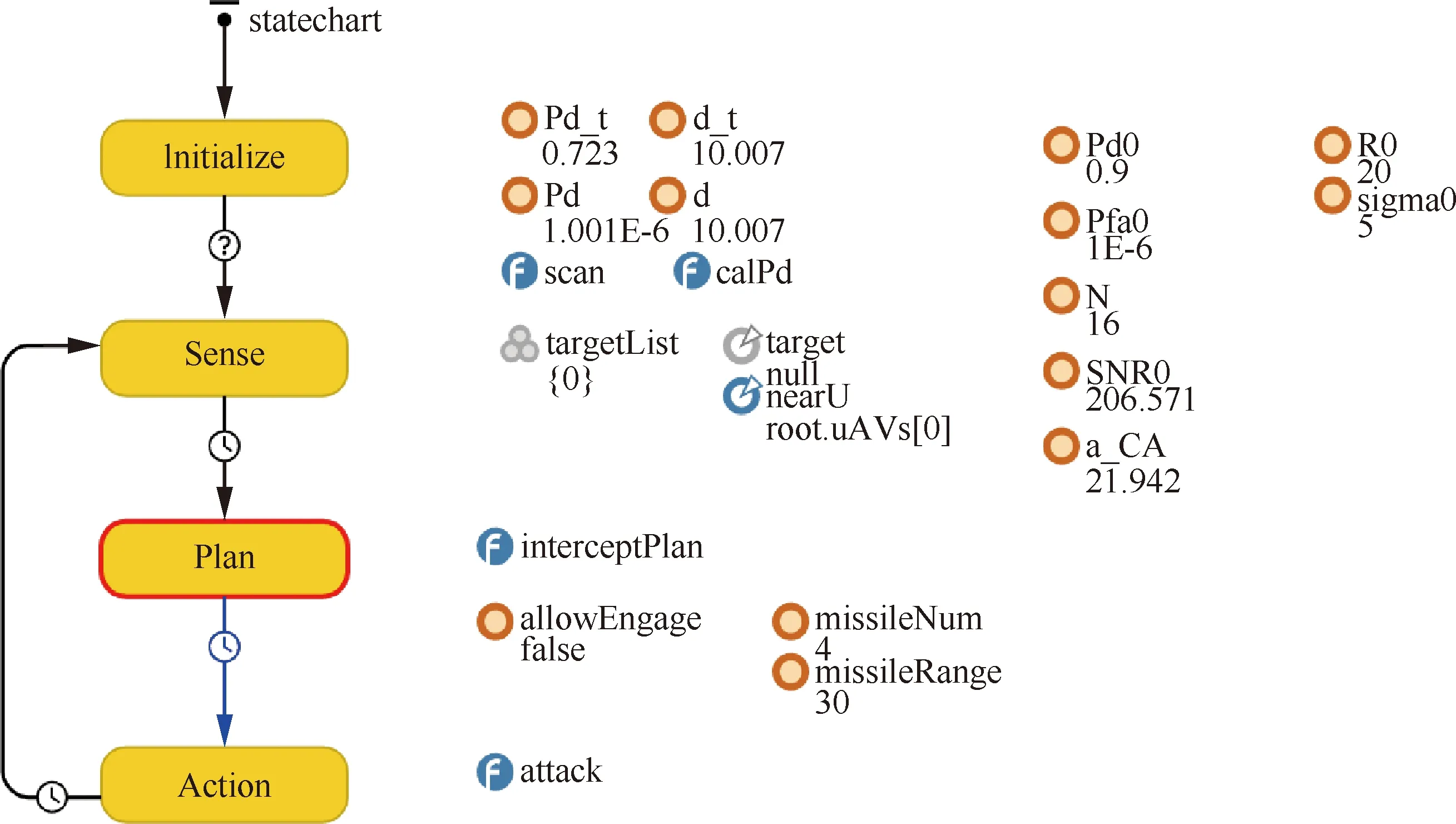
圖13 防空系統Agent模型Fig.13 ADS Agent model
根據無人機空地作戰場景和建立的無人機Agent模型以及防空系統Agent模型,設置仿真參數如表2所示。

表2 仿真參數
在上述仿真場景和參數設置下,為驗證模型的合理性,以一架無人機進行對地搜索和打擊作為基準場景,分析在作戰體系加入1~8架同型無人機加入后的體系貢獻率,無人機數量發生變化后,仍保持無人機按面積均分搜索任務區域、按掃描法進行航路規劃等行動規劃不變,每個實驗點仿真200次,結果如圖14所示。體系貢獻率隨新增無人機數量增加而近似線性增加,在加入4架無人機后接近飽和。體系貢獻率的增加主要是加入更多無人機后,空地導彈總量增加引起的目標摧毀率增加和每架飛機搜索區域面積減少引起的摧毀目標平均效率增加,符合實際情況。
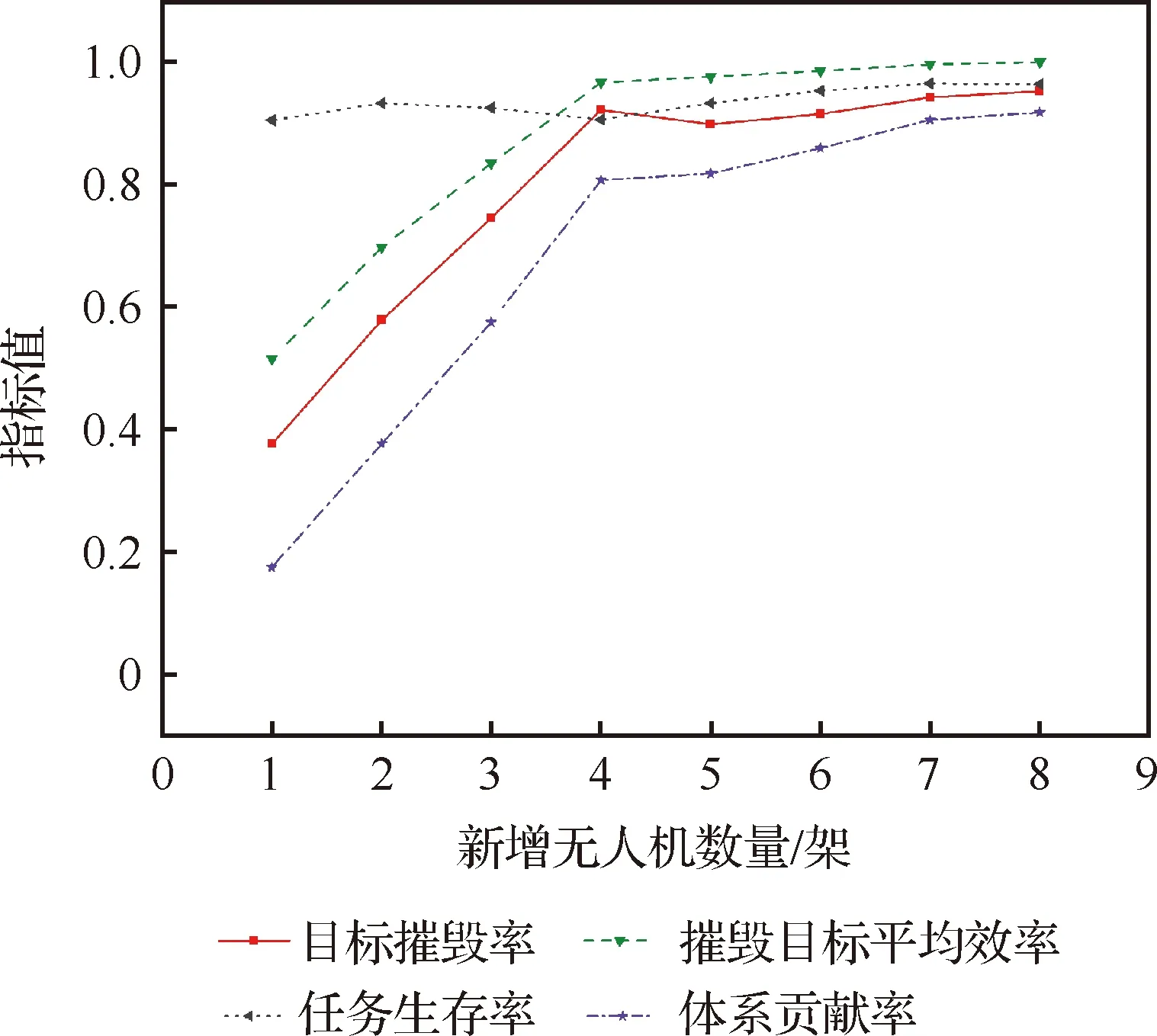
圖14 不同機型數量的體系貢獻率計算指標值Fig.14 Index value contribution of different number of aircraft in system of systems
為驗證高隱身和高速度2類性能更強的新機型替換原有機型后的體系貢獻率,以隱身指標和速度指標為變量,進行實驗設計,總實驗點數180個,每個點進行200次仿真,如表3示。

表3 實驗設計
以基準機型的參數為標準,圖15~圖17分別為增加隱身性能和增加巡航速度后的新機型替換基準機型后,在其他條件不變的前提下,體系效能指標的變化曲線,圖18為新機型的體系貢獻率曲線。

圖15 目標摧毀率Fig.15 Targets destroyed rate

圖16 摧毀目標平均效率Fig.16 Average efficiency of destroying targets

圖17 任務生存率Fig.17 Mission survival rate

圖18 新機型體系貢獻率Fig.18 Contribution of new aircraft type in system of systems
從仿真結果可以看到,圖15中目標摧毀率和圖17中任務生存率2個指標在取定速度的條件下與RCS基本呈2種關系:在速度較低時先降后升,在速度較高時基本不變。
由于無人機決策邏輯為優先規避地空導彈,然后再對目標進行攻擊,故在速度較低的情況下:無人機RCS較大時,防空系統能夠及時發現無人機并發射導彈進行攔截,此時無人機剛進入防區,可快速脫離防區導致地空導彈攔截失敗,無人機可再次進入防區并重復上述過程直至將防空系統裝備的地空導彈耗盡,隨后將目標摧毀,故呈現出任務生存率和目標摧毀率均較高的狀態;隨著RCS的減小,無人機不斷壓縮防空系統探測距離,防空系統探測到無人機時的兩者距離較近,地空導彈發射后無人機逃離導彈攻擊區的可能性不斷降低,故呈現出任務生存率和目標摧毀率隨RCS減小而降低的情況;當RCS進一步減小時,無人機繼續壓縮防空系統探測距離,可能無法被防空系統探測到或其被防空系統探測到時已滿足空地導彈發射條件,無人機發射空地導彈后立即脫離,此時防空系統仍在進行發射準備,故目標摧毀率和任務生存率隨RCS減小而增加。在速度較高的情況下:無人機在防空系統防區內任意位置感知到來襲導彈后均可成功脫離導彈攻擊區,故目標摧毀率和任務生存率基本不變。
圖16中摧毀目標平均效率指標在取定速度條件下隨RCS減小基本呈單調增加關系。其原因在于RCS較大時,無人機易被防空系統發現且距離防空系統較遠,偵察耗時長,同時需要先耗盡防空系統的地空導彈才能對目標進行打擊,打擊耗時長,總體效率低,而RCS較小時則與之相反。其中在無人機速度較小時,效率指標曲線中有一段隨RCS的減小基本保持不變或略微降低,此情況為:RCS的減小使無人機更易發現防空系統,偵察耗時縮短,但同時無人機被防空系統發現時距離防空系統更近,逃脫地空導彈攻擊區的耗時更長,無人機先規避威脅再進行攻擊,故打擊耗時增加。
圖18中無人機的隱身指標和巡航速度變化均會對體系貢獻率有較大影響,整體而言,高隱身性或高速度的機型通常會提高體系貢獻率,該仿真實驗結果與實際情況相符。因為在無人機與防空系統的對抗過程中,提高速度可減少發現目標和打擊目標的耗時,進而提高摧毀目標的效率,同時可縮短無人機暴露于地空導彈威脅區內的時間,進而提高無人機的任務存活率。高隱身性可壓縮防空系統對無人機的預警距離,使無人機能夠在防空系統未發現的情況完成打擊并脫離威脅區,進而提高無人機的任務存活率和目標摧毀率。隱身指標和速度指標變化對體系貢獻率的具體影響為:在速度較低時,保持速度不變,體系貢獻率隨隱身能力的提高先降后升;在速度較高時,保持速度不變,體系貢獻率隨隱身能力的提高單調增加。其原因在目標摧毀率,摧毀目標平均效率和任務生存率3個指標的變化情況中已經闡明。
因此,以對地攻擊型無人機組成的作戰體系執行對地偵察和打擊任務時,若出現無人機由于機載導彈射程小,必須進入防空系統的威脅區的情況,選取RCS極小或RCS相對較小但速度極高的無人機機型的體系貢獻率更高:在隱身能力極強時無人機的體系貢獻率對速度變化不敏感,無人機可以完成對防空系統的打擊且不被其探測到,任務生存率得到提高。此時目標摧毀率和任務生存率的值接近1且基本不隨速度變化,體系貢獻率的增加主要與速度提高帶來的偵察耗時和打擊耗時的縮短,進而使得摧毀目標平均效率得到提高有關。速度極高的無人機可通過耗盡敵方導彈的方式保證任務生存率并完成攻擊,但效率較低。同時在與本文類似的作戰場景中,應避免選擇隱身性能較強但速度較慢的機型,此類無人機被敵方雷達探測到時兩者相距較近,無人機速度較低不易脫離地空導彈攻擊區,生存率極低,從而導致體系貢獻率降低;在僅有此類無人機可用時,應進行戰術策略的改變,如使用射程更遠的空地導彈進行防區外攻擊以提高無人機的體系貢獻率。
7 結 論
1) 基于ABMS方法,建立了無人機和防空系統的分層模塊化Agent模型。模型的通用性和擴展性較好,可根據研究需求變更模塊及模塊參數重構為不同裝備。
2) 通過自底向上的方式實現了對地攻擊型無人機搜索、打擊地面防空系統,規避來襲地空導彈的動態過程仿真,為體系貢獻率分析提供輸入數據。
3) 從增加作戰效果、提高作戰效率和降低作戰代價3個方面建立了作戰體系效能評估指標。
4) 對新增不同數量的同類型無人機和使用不同性能指標的新機型替換原有機型后對體系的貢獻率進行分析,結果驗證了模型的合理性且表明無人機數量增加對體系貢獻率的增加存在飽和值,無人機的隱身指標和速度指標對體系貢獻率的影響存在差異性,對無人機的總體設計和作戰使用策略有參考意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
新世紀智能(數學備考)(2020年11期)2021-01-04 00:38:16
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
新高考·高一物理(2014年1期)2014-09-18 01:26:07
