基于電磁激振的風(fēng)電葉片雙向疲勞加載控制算法研究
2022-10-13 09:28:16范治達(dá)張磊安黃雪梅葉凱
機床與液壓 2022年18期
范治達(dá),張磊安,黃雪梅,葉凱
(山東理工大學(xué)機械工程學(xué)院,山東淄博 255000)
0 前言
進入21世紀(jì)后,隨著全球人口數(shù)量迅速增長以及人們對現(xiàn)代化需求的不斷增加,能源的消耗量日漸增加,發(fā)展可再生能源成為必然選擇。風(fēng)能在全球范圍內(nèi)分布廣泛、儲量巨大,是一種可無限利用、對環(huán)境友好的清潔能源。風(fēng)力發(fā)電機組利用葉片將氣流的機械能最終轉(zhuǎn)為電能,因此風(fēng)電葉片的性能能否達(dá)到要求至關(guān)重要。由于風(fēng)力機葉片長期工作在載荷不斷變化的環(huán)境中,近1/2的風(fēng)力機因為葉片受到疲勞損傷而出現(xiàn)故障。由于葉片材質(zhì)、結(jié)構(gòu)、工藝以及工作環(huán)境復(fù)雜,對風(fēng)電葉片疲勞壽命的理論計算必須通過風(fēng)電葉片全尺寸疲勞測試的驗證。國內(nèi)外針對葉片疲勞加載的方法已經(jīng)有了一定的研究。目前國外一般采用強制位移型疲勞加載方法對葉片進行疲勞測試,而擺錘共振型葉片疲勞加載方法在國內(nèi)得到了廣泛使用。雖然這兩種方法被普遍應(yīng)用,但在葉片疲勞加載中仍存在以下問題:葉片的疲勞分析數(shù)據(jù)與實際情況誤差較大,輸出的載荷譜與預(yù)設(shè)的載荷譜有差距,不能較為準(zhǔn)確地施加符合實際情況的載荷。而基于液壓作動器的疲勞加載系統(tǒng),硬件復(fù)雜,需要配置液壓站,試驗成本高、周期長。在葉片疲勞加載控制算法方面,國內(nèi)外學(xué)者在風(fēng)電葉片疲勞加載控制領(lǐng)域做了相應(yīng)研究。于祥勇等研究了一種基于RLS算法的實際振幅與目標(biāo)振幅的追蹤控制策略。廖高華等提出了基于虛擬主令偏差耦合的同步控制策略。陶黎明等提出了基于自抗擾控制算法的交叉耦合控制策略。TOFT等提出了一套風(fēng)電葉片疲勞試驗線性控制策略。孔曉佳等提出一種基于變增益交叉耦合控制器的速度并行控制算法。上述研究成果雖然在各自領(lǐng)域取得了良好的控制效果,但不適用于電磁力驅(qū)動的雙軸疲勞加載的控制系統(tǒng)。因此,本文作者從提高疲勞測試精度和安裝、操作便捷的角度出發(fā),提出一種基于電磁力驅(qū)動的風(fēng)電葉片疲勞加載新方法。采用一種具有可調(diào)增益的模型參考自適應(yīng)控制算法,并設(shè)計自適應(yīng)律,仿真結(jié)果表明改進后的算法魯棒性好,削弱了噪聲干擾;最后通過搭建試驗臺驗證了該算法的有效性。
1 電磁力驅(qū)動的風(fēng)電葉片雙向疲勞加載方案
在葉片雙向電磁疲勞加載系統(tǒng)中,作用在葉片上的激振力是由電磁激振器的脈沖力提供的,當(dāng)電磁激振器的激振頻率與葉片的低階固有頻率相近時,葉片將產(chǎn)生共振并達(dá)到最大振幅且振動頻率與電磁激振頻率相同。電磁激振器包括鐵芯、線圈、外殼。確定電磁激振器后,電磁力的大小與鐵芯進入線圈的長度有關(guān),當(dāng)鐵芯逐漸進入線圈時,電磁力逐漸增大,當(dāng)?shù)竭_(dá)線圈長度的40%~80%時,電磁力達(dá)到且穩(wěn)定在最大值;鐵芯超過線圈長度80%后,電磁力開始減小,達(dá)到100%后電磁力減小到0。為補充振動過程中葉片損耗的能量,鐵芯在每個周期對葉片補充兩次能量。鐵芯運動規(guī)律及振動位置如圖1所示。
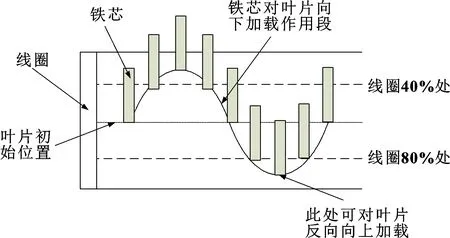
圖1 電磁鐵芯運動規(guī)律及振動位置
當(dāng)葉片振動進入穩(wěn)定狀態(tài)后,在每個周期中,系統(tǒng)阻尼損耗的能量與電磁激振器提供的能量相互平衡,即=,其中:

(1)
式中:為頻率;為振幅;為電磁激振力()在每個周期做的功;為振動周期;為阻尼比;為阻尼;為葉片剛度。根據(jù)能量守恒定理,可計算出電磁加載力、鐵芯直徑的平方和鐵芯質(zhì)量:
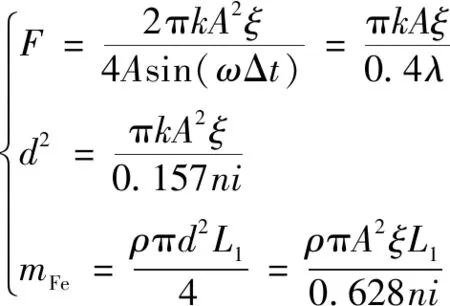
(2)
式中:、、、、分別表示電磁鐵芯直徑、電流、鐵芯長度、線圈匝數(shù)、鐵芯密度。
根據(jù)振動原理,在電磁激振作用下,葉片振動過程為受迫振動,因此該系統(tǒng)的振動微分方程可表示為式(3)。其中,下標(biāo)f表示揮舞方向,下標(biāo)e表示擺振方向,、分別為擺振及揮舞方向的位移。
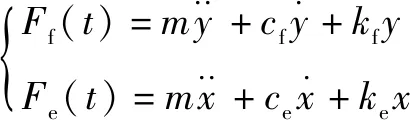
(3)

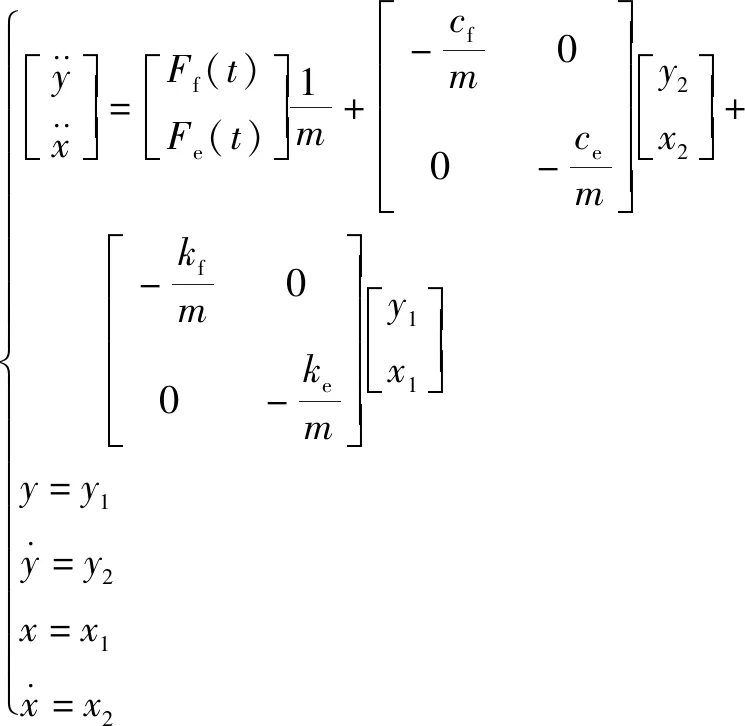
(4)
2 可調(diào)增益的模型參考自適應(yīng)控制算法
在風(fēng)電葉片雙軸電磁疲勞加載系統(tǒng)中,揮舞方向與擺振方向相互之間存在干擾作用,需采用具有較好抗擾動能力的控制算法。可調(diào)增益的模型參考自適應(yīng)控制算法通過不斷地調(diào)節(jié)可調(diào)系統(tǒng)的增益參數(shù),使系統(tǒng)的輸出不斷逼近模型的輸出,從而使誤差接近為0并且保證了控制系統(tǒng)的抗擾動能力以及穩(wěn)定性。該算法主要部分包括參考模型、被控系統(tǒng)以及自適應(yīng)調(diào)節(jié)規(guī)律。
設(shè)被控系統(tǒng)的傳遞函數(shù)為

(5)
式中:、、為已知常數(shù),=0,1,…,-1;為隨時間緩慢變化的參數(shù)。將參考模型設(shè)計為

(6)
將控制器設(shè)計為如式(7)所示,其中為時間的函數(shù),表示調(diào)節(jié)規(guī)律:
()=
(7)
參考模型和被控模型的系統(tǒng)結(jié)構(gòu)如圖2所示。
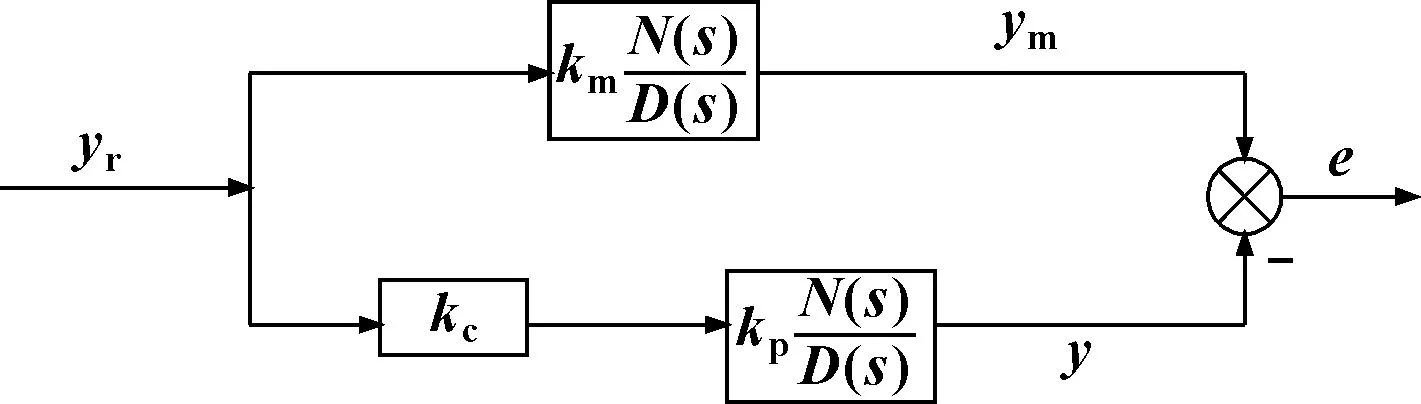
圖2 控制系統(tǒng)結(jié)構(gòu)
為確保控制系統(tǒng)的穩(wěn)定性,需要求解調(diào)節(jié)規(guī)律。由圖2可知=-+,令=-,因此有:

(8)


(9)
可將狀態(tài)方程表示為
(10)

=
?

(11)
矩陣、和分別如式(12)、(13)所示:
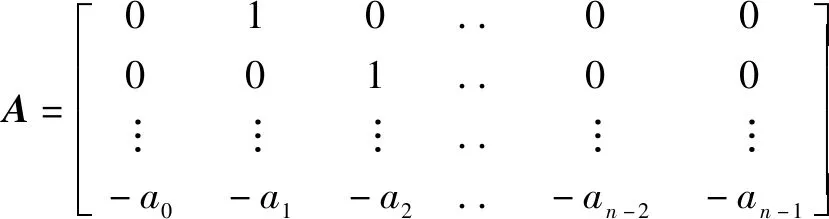
(12)
=[…]
=[1 0 … 0]
(13)
其中:
=-1
=-2--1
?
=--1-1--2-2-…-
(14)
選取如式(15)所示的Lyapunov函數(shù),為對稱的正定矩陣,>0。
=+
(15)
由式(15)運算可得:

(16)
令式(15)最右端兩項相加為0,即:

(17)
自適應(yīng)調(diào)節(jié)規(guī)律由式(17)確定,可表示為
(18)
在控制系統(tǒng)中,緩慢時變,可以將其看作定值,由=-可得:
(19)
將式(19)代入式(18),可得自適應(yīng)調(diào)節(jié)規(guī)律:
(20)
根據(jù)自適應(yīng)原理,式(20)可轉(zhuǎn)化為
(21)
因此,控制結(jié)構(gòu)如圖3所示。
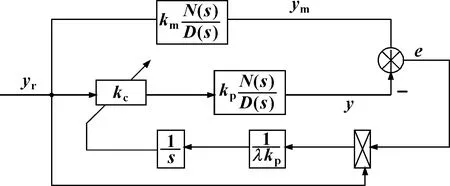
圖3 可調(diào)增益模型參考自適應(yīng)控制結(jié)構(gòu)
3 仿真分析
為驗證可調(diào)增益模型參考自適應(yīng)算法在電磁激振雙軸疲勞加載模型控制系統(tǒng)中的控制效果,在MATLAB中,使用Simulink將該控制策略與PID控制策略通過仿真進行驗證以及比較。首先,為驗證兩種控制策略的跟隨效果,根據(jù)雙軸電磁疲勞加載模型現(xiàn)場試驗,在揮舞方向選取幅值為6 cm、頻率為2π的sin函數(shù),在擺振方向選取幅值為3 cm、頻率為3π的sin函數(shù),普通PID的雙向跟隨效果及誤差分別如圖4、圖5所示。
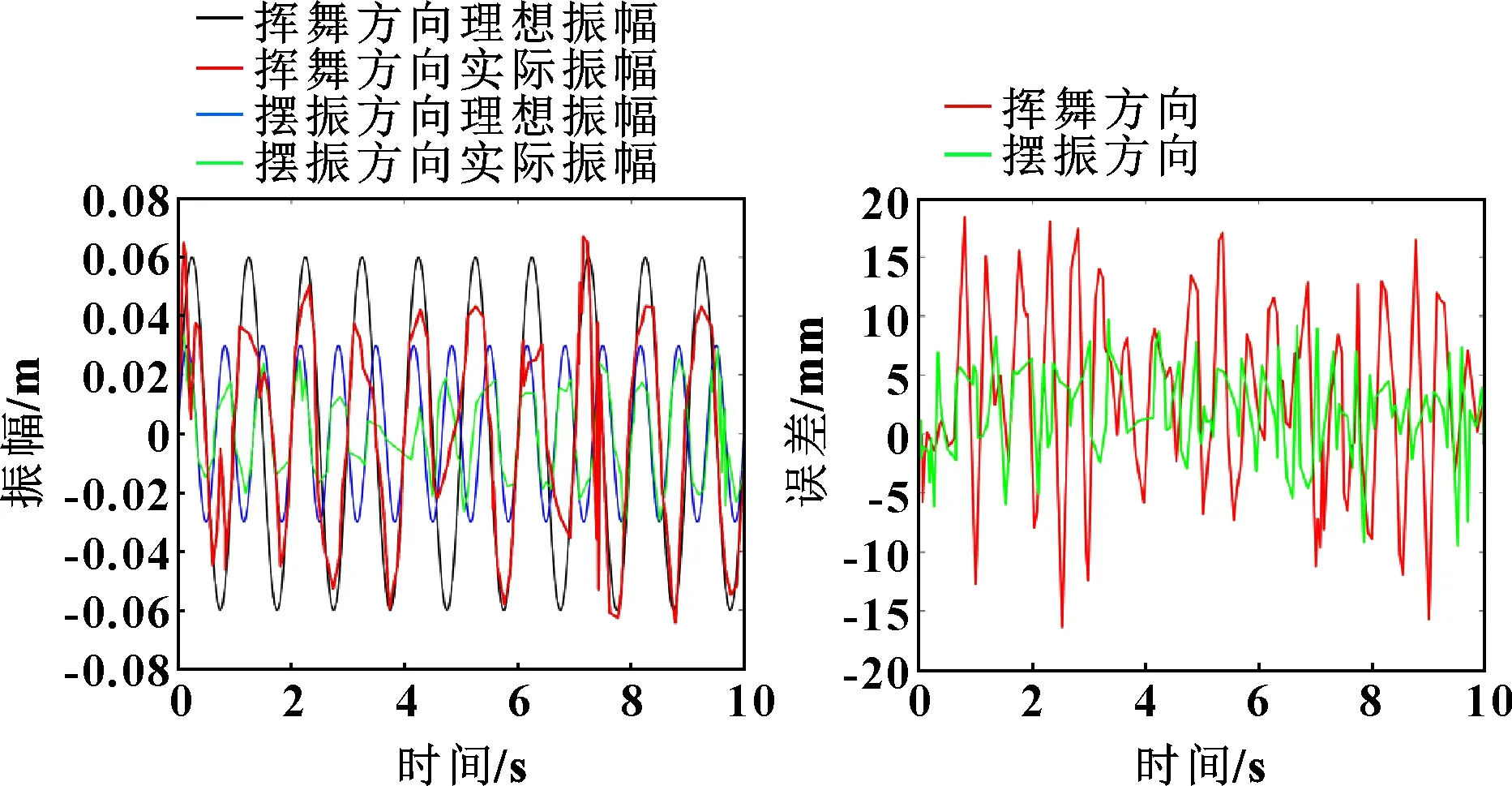
圖4 普通PID跟隨效果 圖5 普通PID跟蹤誤差
由圖4、圖5可知:由于擺振即揮舞方向的相互干擾,總體跟蹤效果很差,在揮舞方向,誤差最大達(dá)到1.7×10m,偏差為28%;在擺振方向,最大誤差為1×10m,偏差為33%,由此可以得出傳統(tǒng)PID不能實現(xiàn)電磁加載源與葉片的同步控制。
可調(diào)增益的模型參考自適應(yīng)控制算法仿真效果如圖6、圖7所示。
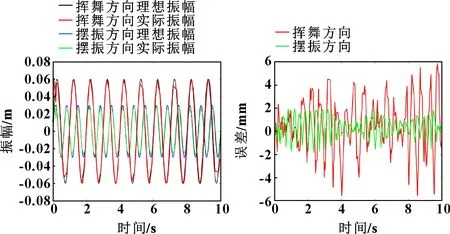
圖6 可調(diào)增益模型參考自適應(yīng)控制跟隨效果 圖7 可調(diào)增益模型參考自適應(yīng)控制跟蹤誤差
由圖6、圖7可知:在=0.4 s后,跟隨過程迅速進入穩(wěn)定狀態(tài),進入穩(wěn)定狀態(tài)后揮舞方向最大誤差為6×10m,偏差為10%;擺振方向最大誤差為2×10m,偏差為7%。采用該算法后,幅值衰減問題已得到改善,初步達(dá)到了期望的跟蹤效果。
由此可以得出,可調(diào)增益模型參考自適應(yīng)控制算法相較于PID算法有更好的穩(wěn)定性且收斂速度更快、跟蹤精度更好。考慮到仿真中算法的實現(xiàn)有一定的理想性,需要通過現(xiàn)場試驗進一步驗證。
4 試驗以及分析
將2 m長的葉片模型根部固定在電磁疲勞加載試驗臺上,在安裝在適當(dāng)位置的葉片夾具上連接加載裝置。通過上位機軟件LabVIEW對試驗過程中的位移、力、頻率等進行監(jiān)控并記錄數(shù)據(jù)。電磁加載源參數(shù)如表1所示。
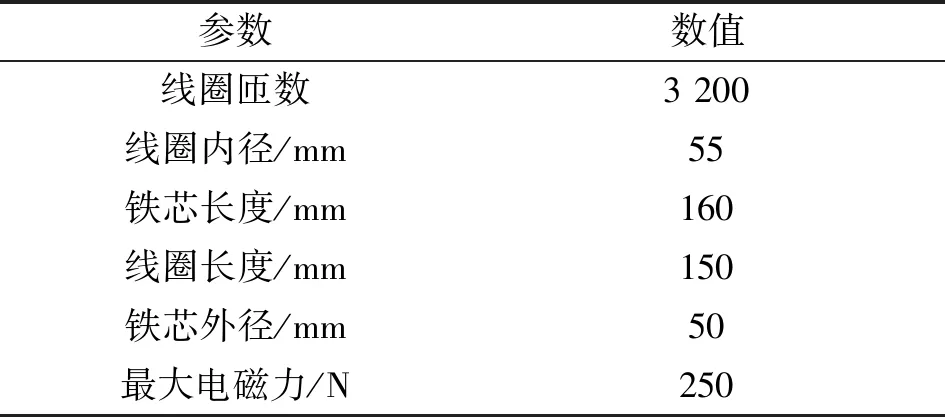
表1 電磁加載源參數(shù)
在電磁疲勞加載過程中,控制系統(tǒng)采用與仿真相同的參數(shù)設(shè)置并使電磁激振器的激振頻率接近葉片揮舞、擺振兩個方向的低階固有頻率,采用可調(diào)增益模型參考自適應(yīng)控制算法進行試驗。圖8所示為揮舞方向的幅值試驗曲線,在0.5 s開始,葉片幅值響應(yīng)開始跟隨,在2 s后達(dá)到理想振動狀態(tài)。圖9所示為擺振方向幅值響應(yīng)曲線,在1 s時開始跟隨,在3.5 s后達(dá)到理想振動狀態(tài)。
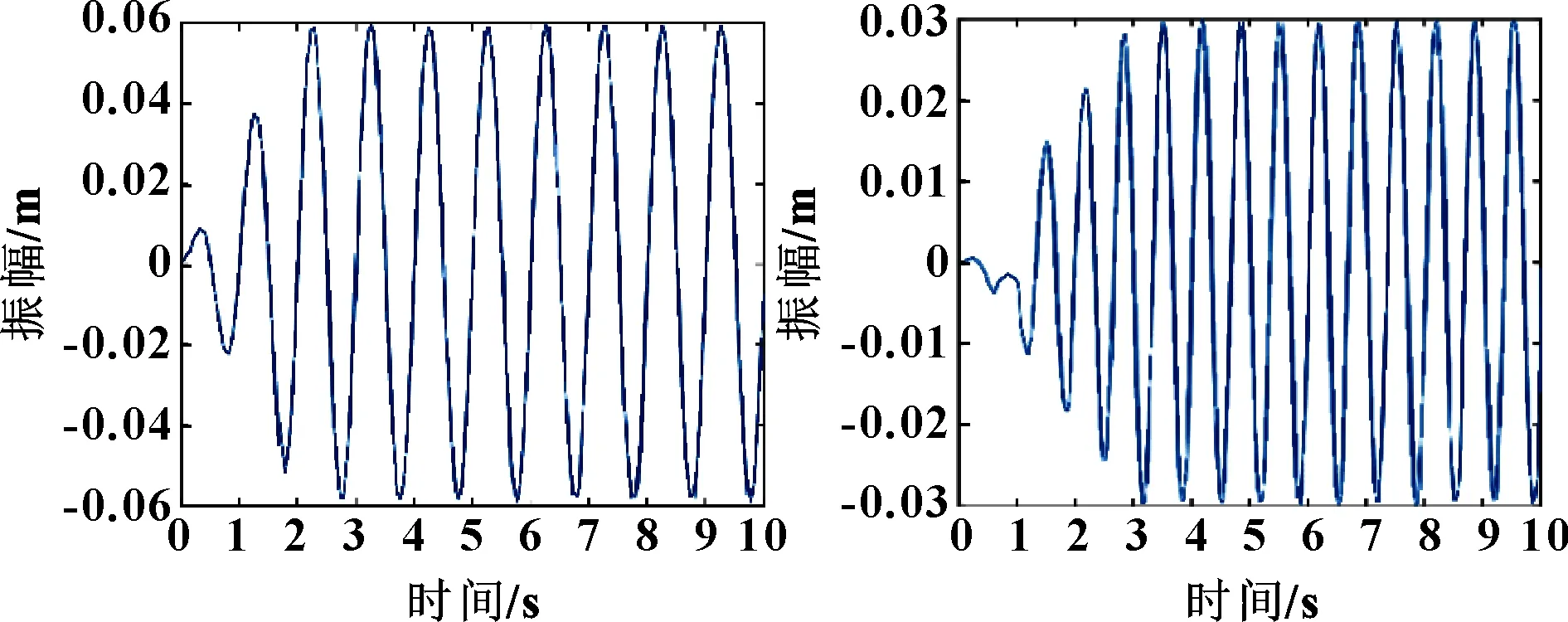
圖8 揮舞方向 圖9 擺振方向
根據(jù)試驗結(jié)果可知:采用可調(diào)增益模型參考自適應(yīng)算法后,電磁加載裝置可以很好地使葉片模型共振并逐步穩(wěn)定在共振頂峰,葉片模型在揮舞方向及擺振方向的振動幅值分別穩(wěn)定在0.06、0.03 m,證明了在此試驗條件下,該算法對電磁疲勞加載系統(tǒng)的同步控制是可行的,驗證了文中算法的有效性。
5 結(jié)論
(1)提出了風(fēng)電葉片雙軸電磁疲勞加載方法,對葉片疲勞加載進行了能量分析,對電磁加載過程建立了狀態(tài)空間方程。
(2)考慮到雙軸疲勞加載相互干擾的問題,采用了可調(diào)增益模型參考自適應(yīng)控制算法,將該算法與PID算法在Simulink中進行了仿真及對比。結(jié)果表明:在揮舞及擺振方向,相較于傳統(tǒng)PID算法,可調(diào)增益模型參考自適應(yīng)控制算法具有跟隨效果好、精度更高的優(yōu)點。
(3)搭建一套風(fēng)電葉片模型雙軸電磁疲勞加載試驗平臺,在現(xiàn)場試驗中對該控制算法進行有效性測試。試驗結(jié)果表明:葉片揮舞及擺振方向的振幅很快達(dá)到穩(wěn)定狀態(tài),并能很好地維持住同步狀態(tài),風(fēng)電葉片雙向電磁疲勞加載試驗的控制精度得到了提高,采用的算法具有良好的魯棒性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
計算機應(yīng)用(2022年2期)2022-03-01 12:33:42
計算機應(yīng)用(2022年1期)2022-02-26 06:57:42
計算機應(yīng)用(2021年4期)2021-04-20 14:06:36
計算機應(yīng)用(2021年3期)2021-03-18 13:44:48
計算機應(yīng)用(2021年1期)2021-01-21 03:22:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
