利用引航軟件提高船長靠離泊技能的方法
2022-10-14 09:39:12黃迪
中國水運 2022年9期
黃迪
(寧波海運股份有限公司,浙江 寧波 315020)
保證靠離泊安全是船長的重點工作之一,即使船上有引航員協(xié)助,也要明確船長始終是第一責任人,這就要求船長必須要有較高的靠離泊技能。筆者在實踐中發(fā)現(xiàn)引航軟件“SEAiq Pilot”(以下簡稱引航軟件或軟件)不僅可以較好提高船長操船安全系數(shù),更重要的還是可以通過對操船過程的完整記錄,供船長有效運用刻意練習的原則穩(wěn)步提高自身靠離泊技能。希望本文能拋磚引玉給同行一個啟發(fā)。
1 引航軟件介紹
1.1 軟件工作架構
該軟件是國內(nèi)外引航員較為常用的引航軟件,目前可以安裝于iPhone、iPad 等多種移動終端中,通過連接于船載AIS 設備的AIS Pilot Plug 所發(fā)出的WIFI 信號接收本船AIS 數(shù)據(jù)源,該AIS 數(shù)據(jù)源中包括了船舶艏向傳感器、速度傳感器等各傳感器所提供的船舶運動參數(shù),最后軟件將這些參數(shù)計算處理后輸出強大的輔助靠離泊數(shù)據(jù)信息。軟件工作架構如圖1所示。

圖1 引航軟件工作架構示意圖
1.2 輔助靠離泊操縱
軟件在輔助船長靠離泊操縱時,能提供許多圖形化的直觀信息,比如艏/尾與泊位間的精確測距、艏/尾橫移速度、船體與泊位的角度、預測船位、艏/尾運動趨勢雙矢量線、旋轉角速度(ROT)等等,船長可以參考這些信息達到安全靠離泊的目的。
1.2.1 精確測量靠離泊三要素
船長在靠離泊操縱中始終要控制好“距離、速度、角度”這三個要素,軟件可以輔助船長對上述靠離泊三要素的精確把握。
如圖2所示為筆者重載漲水靠泊浙能六橫煤電碼頭時的截圖,圖中清楚地顯示著本船距泊位1 倍船寬時船艏/尾與泊位距離為船艏29.8 米,船尾33 米,艏/尾的靠攏速度為船艏0.06 米/秒;船尾0.10 米/秒,靠攏角度1.2°基本平行于碼頭,船尾拖輪已處于拖位纜繩帶力狀態(tài),非常直觀。

圖2 靠泊過程中精確測量“靠離泊三要素”
1.2.2 其他靠離泊操縱數(shù)據(jù)
船長在掉頭靠離泊作業(yè)中對船舶的運動趨勢要有較高的預見性,特別是重載狀態(tài)下在有流港掉頭靠泊中更是如此。如圖3所示仍為上述重載漲水靠泊操縱中的掉頭過程截圖,圖中4 個陰影部分代表本船未來2 分鐘內(nèi)的預測船位,每個陰影間隔30 秒;兩條彎曲矢量線分別代表船艏和船尾在未來6 分鐘內(nèi)的運動趨勢,從此時的矢量線來看船體在4 分鐘內(nèi)可以掉頭完畢;此外頂欄的ROT 數(shù)據(jù)顯示目前旋轉角速度為向左22.6°/min,ROT 可供船長估算掉頭至任意角度所需時間。這些數(shù)據(jù)都為船長安全靠離泊提供了有力支持。

圖3 掉頭過程中精確顯示船舶運動態(tài)勢
1.3 記錄功能
軟件能夠將靠離泊全過程記錄下來,在回放中可以完整顯示上述各種輔助靠離泊操縱數(shù)據(jù),這也是我們對引航軟件要重點利用的功能。
2 提高船長靠離泊技能的有效方法
靠離泊操縱是一門實操性很強的技能,提高船長靠離泊技能需要用到刻意練習。刻意練習是佛羅里達州立大學心理學教授安德斯·艾利克森等在《刻意練習:如何從新手到大師》中提出的,它要求我們在平時工作中除了要有大量的練習或是實操,還要進行高質量的反饋以達到較好效果。這里的反饋最好來自高水平導師的即時指點,但在船長獨立頂崗后這樣的即時反饋也就隨之結束了,因此船長必須要對每次的靠離泊操縱進行自我反饋,反饋可以通過對操縱過程的完整復盤進行,而這就需要有對操縱過程的完整記錄作為前提條件。筆者在實踐中利用引航軟件的記錄功能結合刻意練習原則,總結出了一套“提高船長靠離泊技能操作流程”(如圖4所示)。此外船長還要能經(jīng)常以某個稍有難度的目標為導向,在確保安全的前提下跳出舒適區(qū)進行靠離泊操縱。
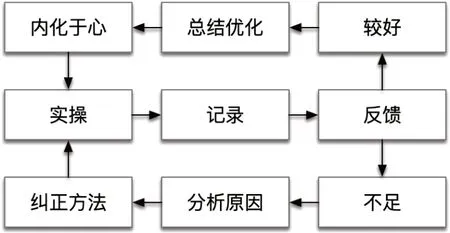
圖4 提高船長靠離泊技能操作流程圖
2.1 記錄與反饋
船長的每一次靠離泊經(jīng)歷都是寶貴財富,都值得記錄與反饋。傳統(tǒng)上許多船長都是在事后憑記憶去記錄過程,但很多關鍵數(shù)據(jù)的缺失或不準確,難免會使反饋效果大打折扣。軟件的記錄功能很好地解決了這個問題,它能在船長操船過程中將本船的關鍵數(shù)據(jù)全部保存下來,在企業(yè)版軟件中還可以同步記錄船長發(fā)出的指令等音頻信息,這大大提高了反饋的準確性。
記錄信息可以通過兩種形式回放出來,一是軌跡復原圖形式;二是視頻回放形式,以上兩種形式相輔相成,在進行反饋時可以先用軌跡復原圖對本次靠離泊操縱進行一個操縱結果的總體評判,然后視頻回放整個靠離泊過程,從操縱結果出發(fā)對自己在操縱過程中的各項指令做出精準反饋,分析不足之處,然后想辦法來糾正。當然對于較好地操縱過程要總結優(yōu)化,最后內(nèi)化于心,達到有效提高靠離泊技能的目的。
2.1.1 軌跡復原圖
不同于一般的ECDIS 只有線性軌跡記錄,引航軟件可以將本船運動中的船位以群組的方式按時間順序排列展現(xiàn)出來,船長可以從本船運動全貌中對操縱結果進行大致的評判。
案例一:突遇大風浪掉頭靠泊。圖5為筆者某次重載漲水靠泊浙能樂清電廠碼頭的軌跡復原圖,本次靠泊在掉頭過程中突遇九級大風,風向東北為斜順風,由于強風影響,從圖中可以看出掉頭過程幾乎原地完成,未像往常一樣在漲水流的作用下一邊掉頭一邊漂向上游,接下來在掉頭完畢向碼頭靠攏的過程中船位及時后退至合適水域,從而保證了與碼頭穩(wěn)泊船的安全縱距,為最后的安全靠泊上好保險。從整個操縱的結果來看本次靠泊是比較成功的,沒有因突遇強風而發(fā)生險情。接下來就可以用視頻回放整個靠泊過程,以便將成功經(jīng)驗總結優(yōu)化并內(nèi)化于心。

圖5 案例一 突遇大風浪掉頭靠泊軌跡復原圖
2.1.2 視頻回放
軟件在視頻回放時可以動態(tài)展示和靠離泊當時一致的所有數(shù)據(jù),圖6為案例一的視頻回放截圖,可以看出當時由于強風的影響,掉完頭后還一直有進速,為了與碼頭穩(wěn)泊船及時拉開縱向距離,筆者在用拖輪控制好船舶橫移速度和角度的同時,先用較長時間的倒車將船退到安全位置,再合理使用車舵及拖輪以抵消強斜順風帶來的不利影響,最終將船舶以極低的速度貼上泊位。整個靠泊過程是順利的,但也有需要總結優(yōu)化的地方。在回放中發(fā)現(xiàn)船舶向碼頭靠攏的過程中,船尾在拖輪拖拉狀態(tài)下偶有發(fā)生大幅向右偏移的情況,后來知道這是由于大風浪使船尾拖輪短時無法保持住船位所致,雖然當時拖輪又很快恢復狀態(tài)并及時拖住,但由此筆者就想到了如果下次再遇到這種情況,就要有隨時準備用短時進車配合右滿舵去克服不利情況的思維模式,最后將這個思維模式內(nèi)化于心。

圖6 案例一 突遇大風浪掉頭靠泊視頻回放截圖
2.2 與他船的對比反饋
好的反饋還需要與他船的靠離泊范例進行對比,通過與好的范例對比可以更好地判斷自己的操縱是否合理,這就需要對他船的靠離泊過程也進行記錄,軟件的虛擬登輪功能可以為此提供條件。船長虛擬登上某條正在靠離泊操作的船舶后,該船的動態(tài)數(shù)據(jù)就能和本船一樣一目了然,并也可以完整記錄,供船長用來和自己的操縱做對比。筆者建議在港期間可以重點虛擬登上一些由引航員操縱的船舶,一般由本港引航員操縱的靠離泊可以成為較好的范例進行對比反饋之用。這個對比反饋可以是同一個泊位,也可以是不同的泊位
2.2.1 與同一泊位的較好范例對比反饋
案例二:狹窄港池開首掉頭離泊。筆者某次在京唐港期間虛擬登上一條正在該港11 泊離泊的外輪,當時該輪由引航員采用開首向左掉頭的方式離泊,整個離泊過程較為安全順暢,筆者用軟件對此進行了完整記錄(見圖7中的綠色軌跡)。湊巧沒過多久筆者也靠上了京唐港11 泊,在離泊時同樣采用了開首向左掉頭法(見圖7中的紅色軌跡)。將兩條軌跡復原圖疊加在一起后,可以看出兩條軌跡基本一致,通過對比說明筆者的操縱結果基本合理。然后再用視頻回放來復盤整個離泊過程,圖8為本船的視頻回放截圖,從中可以看出當時本船轉心被較好地控制在船尾位置,船舶運動態(tài)勢呈扇形狀,這樣可以保證在船尾距碼頭較近位置處完成掉頭動作,通過本次總結再次驗證了對轉心位置的精確把握是船舶在狹窄水域安全掉頭的關鍵因素。
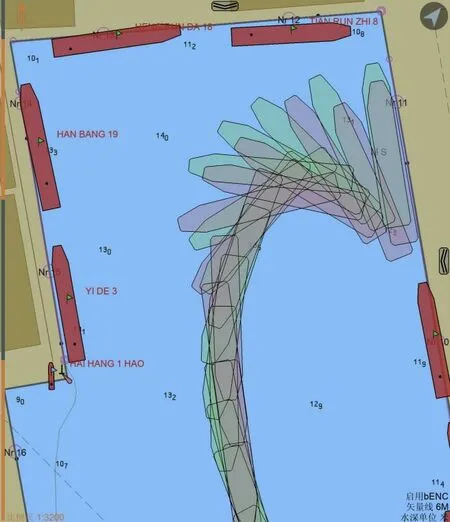
圖7 案例二 狹窄港池開首掉頭離泊(與他船軌跡對比)

圖8 案例二 狹窄港池開首掉頭離泊視頻回放截圖
2.2.2 與不同泊位的較好范例對比反饋
刻意練習還要求船長要適時走出靠離泊操縱的舒適區(qū)。為了能讓自己的靠離泊技能持續(xù)提高,船長可以把較為簡單的泊位甲當成一個練習場地,將其想象成某個難度稍高的泊位乙,有意識地給自己稍稍增加點難度,然后通過和靠離泊位乙的較好范例相對比,從中分析問題并總結優(yōu)化,為以后靠離類似泊位做好準備。
案例三:不規(guī)則港池順勢開尾掉頭離泊。如圖9所示為秦皇島煤五期港池,該港池上部呈梯形,708 泊位于梯形北部,可用水域較窄,709 泊位位于梯形南部,可用水域較寬。顯然從708 泊掉頭離泊的難度較709 來說要稍高一點。筆者在某次從709 泊離泊時有意識地將其想象成708 泊,并用先退至合適位置后再向右掉頭的離泊方式實施操縱,而且整個后退和掉頭過程未使用倒車(見圖9中紅色軌跡),在事后回放復盤中自我反饋評價還可以。然后筆者找機會虛擬登上幾條從708 泊離泊的船,選出一條操縱較好的船舶進行對比(見圖9中的綠色軌跡),通過對比其中的運動數(shù)據(jù)發(fā)現(xiàn)兩者基本一致,表明筆者的操縱方式可以從708 泊安全離泊,反饋效果較好。所要總結優(yōu)化的是在后退時可以適當短時用倒車將船位退至更靠南些的位置,這樣掉頭水域就更寬敞,確保離泊操縱萬無一失。
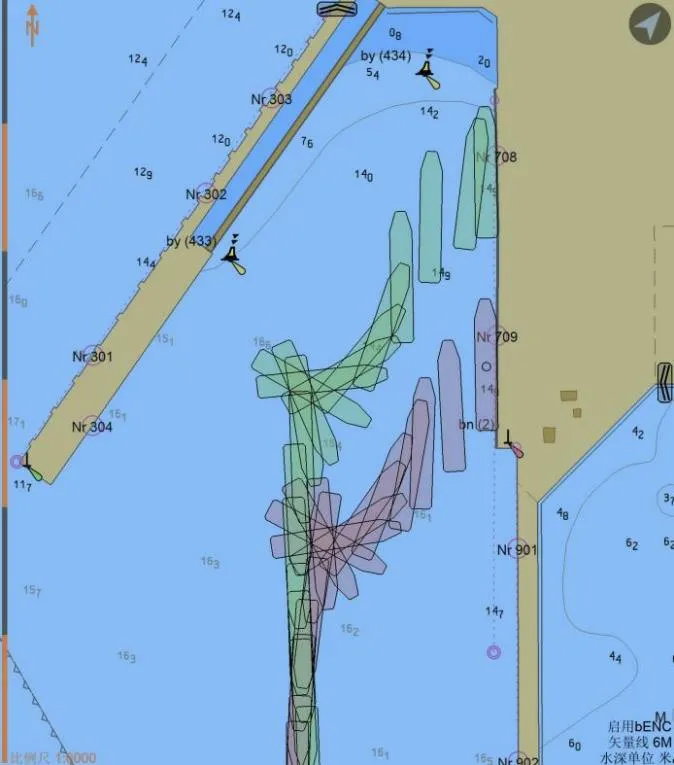
圖9 案例三 不規(guī)則港池順勢開尾掉頭離泊(與他船軌跡對比)
3 引航軟件使用注意事項
以上案例均是利用軟件對靠離泊操縱數(shù)據(jù)的完整記錄來幫助船長在事后有效反饋自己的操縱是否合理,以期在不斷地改進、優(yōu)化中提高自己的靠離泊技能。值得注意的是該軟件雖然能給船長提供高質量的輔助靠離泊數(shù)據(jù)信息,但也有其局限性。軟件所展示出來的船舶各項運動參數(shù)的準確性取決于船載AIS 數(shù)據(jù)源的準確性,也就是取決于船舶各傳感器數(shù)據(jù)的準確性,由于在近距離靠泊操縱時對船體運動態(tài)勢需要有足夠強的敏感性,為了確保不因相關傳感器微小誤差和延時而影響安全,筆者不建議在距碼頭一倍船寬以內(nèi)的近距離靠泊操縱時使用該軟件,也提醒在使用時不能對其過分依賴。
4 結語
引航軟件在船長靠離泊操縱時可以提供較為精確的數(shù)據(jù)信息,并可以將這些數(shù)據(jù)全部記錄下來。船長可以利用引航軟件的這些優(yōu)勢,參照本文圖4所示“提高船長靠離泊技能操作流程圖”的步驟,通過分析不足之處并及時糾正,總結優(yōu)化好的方法并內(nèi)化于心,最終達到提高靠離泊技能的目的。
猜你喜歡
故事作文·高年級(2023年10期)2023-10-23 11:21:18
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
工會博覽(2022年16期)2022-02-04 16:58:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國公路(2017年19期)2018-01-23 03:06:33
學苑創(chuàng)造·A版(2017年6期)2017-06-23 14:10:46
中國船檢(2017年3期)2017-05-18 11:33:09
Coco薇(2015年11期)2015-11-09 13:03:51