基于高精度衛星差分定位的組合導航研究
2022-10-15 15:54:04宋麗艾長勝孫崇書魯海寧任剛長
現代信息科技 2022年15期
宋麗,艾長勝,孫崇書,魯海寧,任剛長
(1.煙臺科技學院,山東 煙臺 265600;2.蓬萊巨濤海洋工程重工有限公司,山東 煙臺 265600;3.山東蓬翔汽車有限公司,山東 煙臺 265600)
0 引 言
目前,工廠車間之間、工位之間以及不同廠區之間的物流搬運多為人工拖運,自動化程度低,不僅費時費力使勞動成本增加;對于特殊工廠的加工對于物流運輸員工的更是有人身安全問題。為了滿足工廠中物流運輸的要求,國內外很多學者對移動機器人做了大量研究。室內外單一導航方式,在精度和穩定性上基本滿足要求,但是對于路面環境復雜且行駛路線分布室內外的導航方式仍有很多不足。為了滿足這種需求提出了一種GNSS與Lidar組合導航的方法。
GNSS是一種天基無線電導航系統,通過接收機接收天上衛星發射的信號,根據信號發射和接收的時間差或者信號的載波相位來確定衛星和接收機之間的距離,基本觀測量主要是碼相位(精測距碼P碼和粗測距碼C/A碼)和載波相位。測量應用有精密單點定位技術(PrecisePoint Positioning,PPP),相對定位以及虛擬參考站動態定位技術VRS(Virtual Reference Station)技術。同時采用雙天線GNSS/INS系統進行移動機器人的姿態測量。
SLAM實時定位與地圖構建,主要應用于一個機器人在未知的環境中運動,通過對環境的觀測確定自身的運動軌跡,同時構建出環境的地圖。在激光SLAM系統中,Gmapping獲取掃描的激光雷達信息以及里程計數據不良等情況而引發的火災、漏電等生產安全事故,因此這種方式一般用可動態的生成2D柵格地圖。導航包則利用這個柵格地圖,里程計數據和激光雷達數據做出適合的路徑規劃和定位,最后轉換為機器人的速度指令。
本文對兩種導航方式組合,并進行定位分析,在復雜環境中進行試驗,驗證該組合導航的可靠性和實用性。
1 組合導航原理分析
1.1 差分GNSS導航系統
在室外,主要通過GNSS系統進行導航定位,首先需要架設固定基站,設定基站固定的坐標值,保證差分數據的正確,通過電臺通信的方式將差分信息發送給移動站,移動站收到差分信息進行差分處理,提高GNSS導航系統的定位精度。如圖1所示,移動站GNSS天線固定在AGV或者移動機器人前后方向上,后向天線為定位天線,前向天線為輔助天線用于輔助計算航向角,由于GNSS導航系統輸出的是WGS84坐標系數據,需通過高斯投影算法將WGS84坐標系轉化為平面坐標系,直接轉化的平面坐標系原點距離AGV或者移動機器人很遠,坐標值數值較大,為了便于計算將轉化后的坐標系原點平移到車輛附近,建立適用于AGV或者移動機器人使用的GNSS局部坐標系。最后在局部坐標系中利用雙天線測量獲得AGV或者移動機器人的位置和姿態信息。
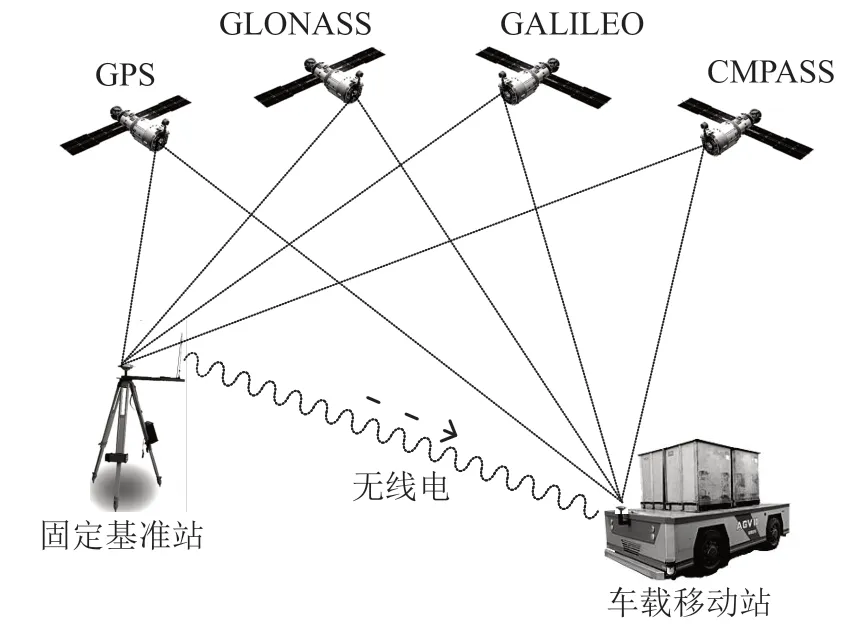
圖1 差分GNSS導航系統
1.2 激光SLAM導航
在室內,通過激光SLAM進行導航定位,對于載物體型尺寸較大的AGV或者移動機器人,不能使用單一的激光雷達置于頂部進行環境檢測,故采用對角分布的雙激光雷達進行360度掃描。如圖2所示,首先需要將兩個激光雷達的掃描面重合,然后開始建圖,建圖完成之后需要將所建的地圖進行旋轉平移,使地圖與GNSS局部地圖重合。在導航使用Lidar系統輸出的位姿信息時,同樣需要進行相同的旋轉平移。
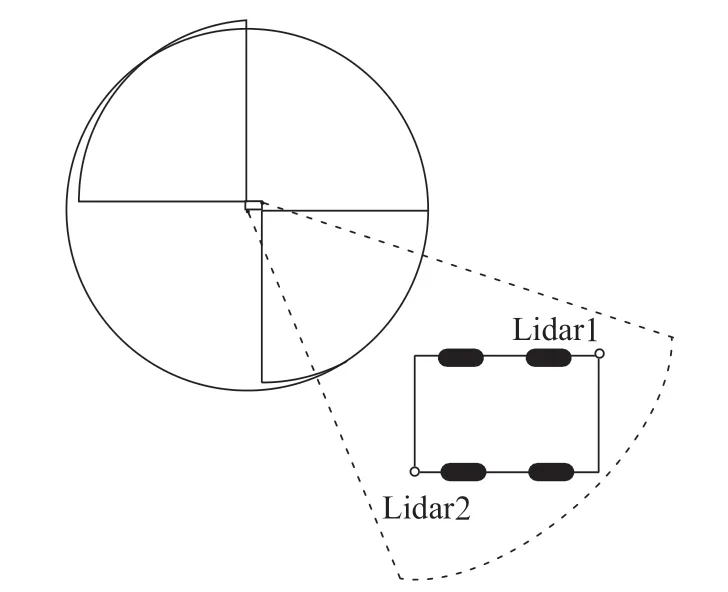
圖2 Lidar布局方案
1.3 組合導航
首先在室外采用差分GNSS導航系統提高GNSS定位導航信息的精度,同時GNSS系統與INS系統組合提高導航信息的穩定性,經高斯投影方法將大地坐標系轉化為平面坐標系,通過雙天線測量方式計算獲得位姿信息(,,);在室內使用激光SLAM算法獲得激光平面坐標系下的位姿信息(,,)。然后將兩坐標系分別平移旋轉進行重合處理獲得導航位姿信息(,,),最后根據不同來源的導航信息狀態隨時進行切換處理保證室內外導航信息可靠性。過程如圖3所示。
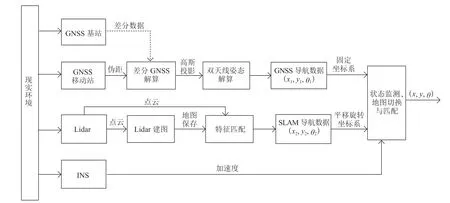
圖3 差分GNSS和激光SLAM組合定位框圖
1.3.1 高斯投影與構建GNSS局部坐標系
在室外,主要通過GNSS系統進行導航,由于GNSS導航系統輸出的是WGS84大地坐標系數據,地心坐標系是坐標系原點與地球質心重合的坐標系,輸出數據的格式是經度、緯度和海拔高度,此信息不能直接用于AGV或者移動機器人導航,需轉化為平面坐標系。采用高斯投影方法進行轉換,如圖4所示。
1.3.2 建立Lidar局部坐標系
在室內GNSS信號很弱,采用對角分布的雙激光雷達進行導航。采用對角分布的激光雷達需調整兩個雷達的掃描面在同一水平面,進行360度掃描,兩激光雷達通過網線連接到交換機上,從交換機引出網線,將激光掃描信息發送給工控機,同時將車輛狀態信息也發送給工控機進行建圖等處理操作,過程如圖5所示。

圖4 高斯投影簡圖
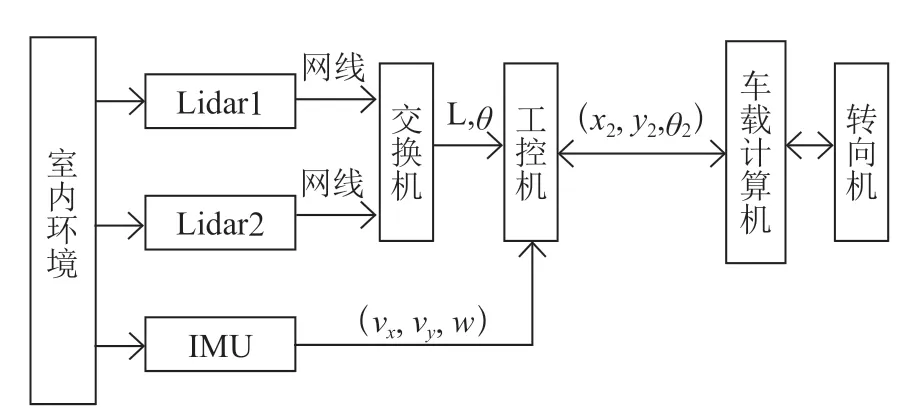
圖5 激光SLAM導航系統
然后緩慢駕駛AGV或者移動機器人根據掃面獲得的點云數據進行建圖處理,為了保證不同數據源切換時數據穩定,把激光導航系統局部坐標系原點設置在GNSS信號穩定的位置,一般設立在切換點上,建圖完成之后保存地圖。在使用激光導航系統時。需要時時向激光導航系統發送AGV或者移動機器人的位置姿態信息,便于激光系統導航根據相對特征快速匹配地圖。同時為了與GNSS導航系統的局部地圖快速對接,需將不同數據源的坐標系融合,保證在AGV或者移動機器人運行時只有一個局部坐標系原點,應將激光導航系統的地圖和時時的點云數據進行旋轉平移。
1.3.3 狀態檢測與地圖切換
地圖切換主要包括兩種形式,分別是從GNSS強信號區域行駛到GNSS弱信號區域和從GNSS弱信號區域行駛到GNSS強信號區域,對應著GNSS導航系統與激光導航系統的切換,由于這兩種導航系統的導航信息中包含導航信息可信度等狀態信息,有了這些狀態信息可以靈活的進行兩種導航方式地圖切換。
Lidar導航系統切換至GNSS導航系統,若在GNSS信號變弱之前地圖匹配成功,則進行導航信息源的切換,AGV或者移動機器人繼續行駛,否則車輛暫停,靜態完成地圖匹配之后在進行導航信息數據源切換,切換完成繼續行駛。GNSS導航系統切換至Lidar導航系統,在Lidar導航系統地圖匹配時需要一定時間,故在切換過程中GNSS導航系統的導航信息狀態由接收到的衛星信息和衛星數量進行判定,而Lidar導航系統的局部地圖是否匹配成功需要由計算出的地圖可信度信息進行判定,確保導航系統切換成功。
2 組合導航試驗測試
驗內容:本試驗主要測試大廠區構建3D點云圖的精度、GNSS與3D Lidar組合定位精度,以及車輛軌跡和停車精度。
測試地點:本測試報告實驗場地在某制藥公司。
清朝初年,著名藏書家孫從添總結古人藏書經驗,并加以系統整理后,撰寫了中國第一部全面論述藏書技術的理論著作《藏書紀要》。該書詳細介紹古人藏書在購求、鑒別、鈔錄、校讎、裝訂、編目、收藏和曝書等方面的經驗,對后世的古籍整理具有重要的參考價值。特別是相關術語和準則,至今仍在延用。
測試環境:現場環境包括空曠的室外環境和半室內環境。
導航方式:全球導航衛星系統(GNSS)與雙3D SLAM雷達組合導航。
測試速度:直線行駛速度為1.5 m/s、轉彎速度為0.8 m/s、停車速度為0.3 m/s。
2.1 全局路徑規劃
針對某藥廠生產實際和已知條件進行了基本分析和全局路徑規劃,路徑規劃如圖6所示,現場測試如圖7所示。
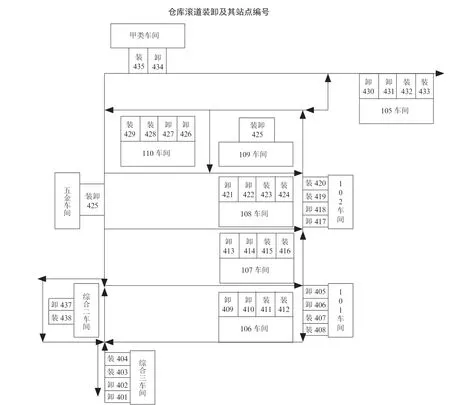
圖6 路徑規劃圖

圖7 現場測試圖
2.2 建圖效果
圖8為現場建圖側視圖效果,經過測試里程計數據與真實環境的偏差小于0.1 m。
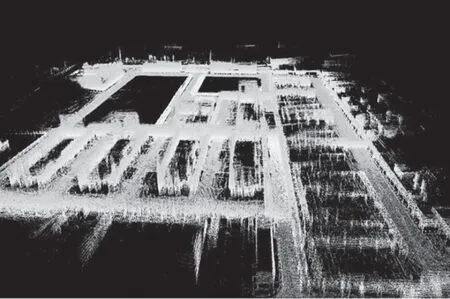
圖8 現場建圖側視圖效果
2.3 避障程序試驗
避障程序開發通過指令選擇不同的防護區域,防護區域的不同,防護區域的防護范圍不同,圖9為防護區域的大小變化,圖紙不同顏色的點為不同的防護區域障礙。
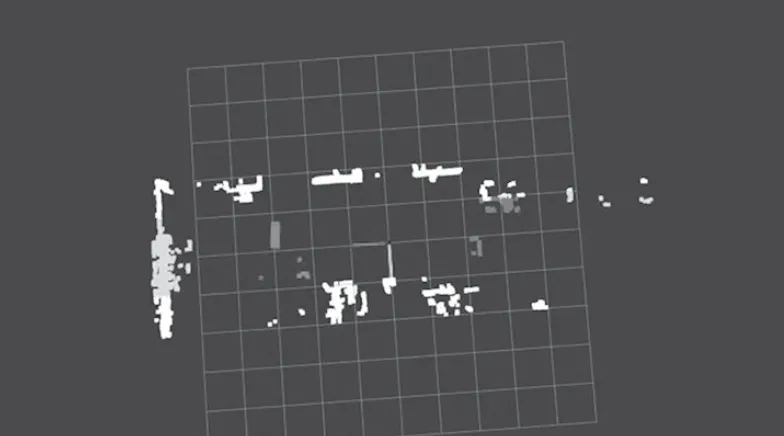
圖9 接收指令后的數據
2.4 定位精度測試試驗
定位精度是在建圖的基礎上測試,圖10為構建點云圖的局部視圖。
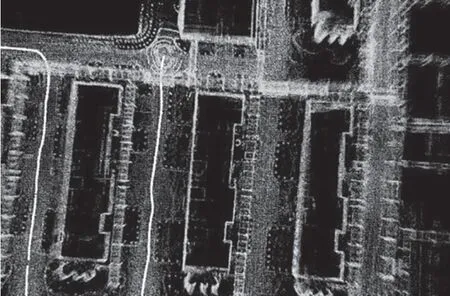
圖10 局部點云圖
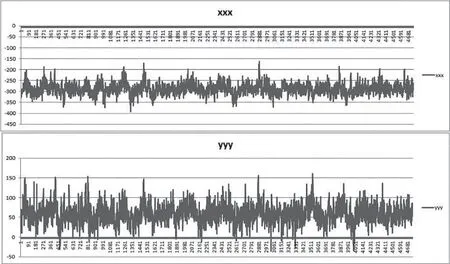
圖11 定位數據波動情況
2.5 通信接口測試
通信接口測試接口程序穩定性和硬件接口穩定性,在校通過串口助手測試發送782 213個數據未出現不良情況,如圖12所示。
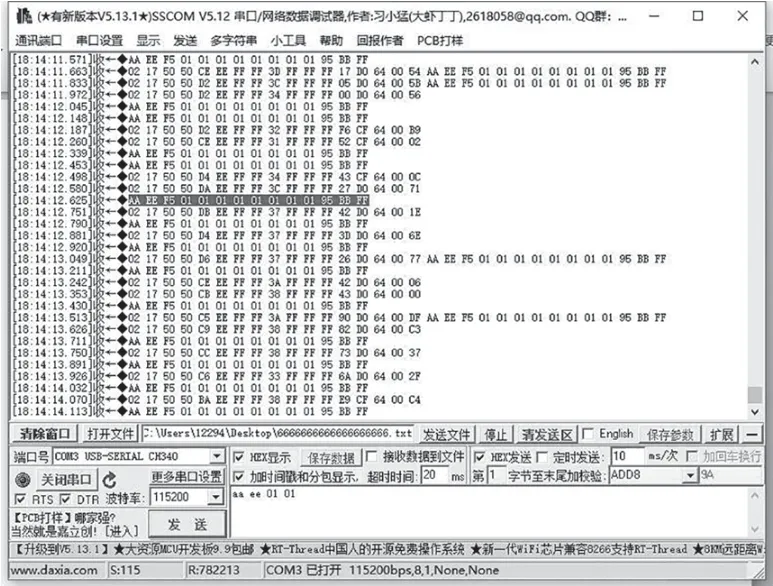
圖12 接口數據
2.6 停車精度
車輛在作業過程中,導航系統根據定位數據控制車輛運行,停車精度這個指標保證了車輛作業的穩定性。圖13為現場10次運行過程中多次停車的精度,圖中白色線為自動駕駛模式下軌跡。經實驗車輛橫縱方向的停車精度在±5 cm以內。
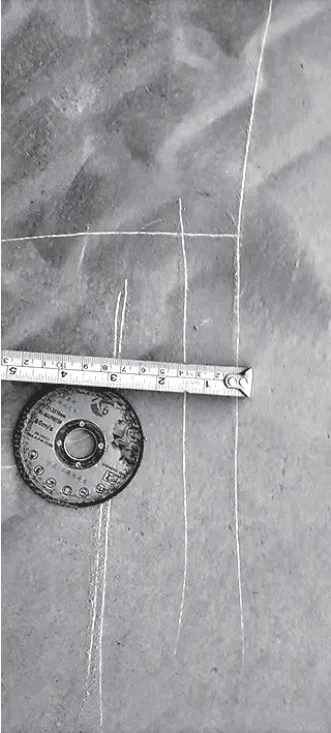
圖13 車輛多次運行停車范圍
2.7 試驗結果
經過實驗測試,構建3D點云圖的精度與真實場景偏差小于0.1 m;定位數據的標準差為25.45 mm,的標準差為24.20 mm;在自動駕駛模式下車輛的直線行駛軌跡重合偏差和停車偏差小于±5 cm。經過以上測試,車輛的軌跡重合精度和停車精度滿足現場需要,可以實現全自動搬運。
3 結 論
基于高精度衛星定位組合導航的卡車AGV控制系統,采用Lidar和GNSS/INS組合定位,室內采用激光SLAM進行導航,室外采用差分GNSS導航系統進行導航,通過對差分GNSS構建的局部坐標系平移和對激光SLAM構建的局部坐標系先旋轉再平移,使兩種坐標系重合。在運動導航過程中檢測導航信息狀態,根據導航信息的狀態特征進行兩種導航方式的切換。差分GNSS和激光SLAM組合導航的方法彌補了單一導航方式的不足,實現了室內外穩定的輸出導航信息,停車精度小于±2 cm,可廣泛應用于工廠車間之間、工位之間的物流搬運。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
制造技術與機床(2017年3期)2017-06-23 08:11:21
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28