新能源汽車制動系統解析(四)
2022-10-18 08:29:26江蘇高惠民
汽車維修與保養 2022年7期
◆文/江蘇 高惠民
(接2022年第5期)
三、豐田電動汽車ECB系統解析
線控制動的初級階段的電液制動( E l e c t r o n i c HydraulicBrake,EHB)系統中,最具有代表性之一的是日本愛得克斯公司的電子控制制動(Electronic Controlled Braking,ECB)系統。2001年愛得克斯開始將其ECB系統配備在豐田Estima混合動力汽車(僅在日本銷售),2003年至2009年愛德克斯又分別將ECB的升級版ECBⅡ和ECB Ⅲ裝載到豐田混合動力車(HEV)Prius2代和3代,以及雷克薩斯混合動力車上,如今ECB又與豐田等品牌的純電動汽車(EV)配套,成為較成熟的線控電子控制制動系統。下面本文將通過ECB在豐田EV上的應用,全面剖解愛德克斯ECB技術。
1.ECB系統概述
ECB系統組成和安裝位置如圖28所示,它涉及的控制系統有:防抱死制動系統(ABS)、電子制動力分配(EBD)、制動輔助、牽引力控制(TRC)、車輛穩定性控制(VSC)、主動轉向輔助(ACA)、與電動轉向助力(EPS)協同控制、二次碰撞制動、上坡起步輔助控制和制動保持。ECB系統架構如框圖29所示。

圖28 ECB系統組成和安裝位置
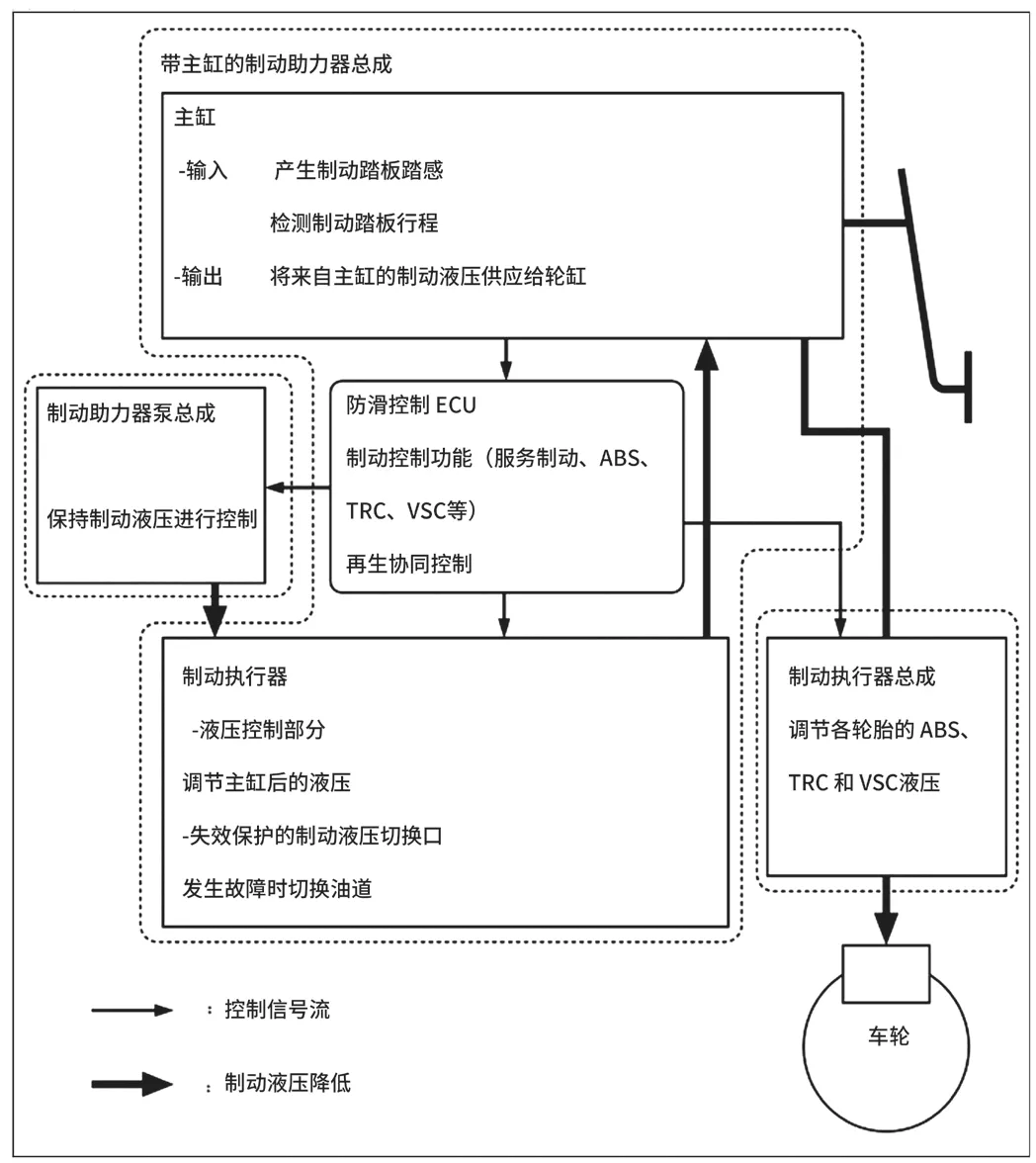
圖29 ECB系統架構框圖
(1)電子控制制動系統使用傳感器檢測制動踏板踩下程度。防滑控制ECU根據此情況計算制動力,帶主缸的制動助力器總成、制動助力器泵總成和制動執行器總成控制4個車。
(2)電子控制制動系統與EV系統協同控制以實現對制動液壓和再生制動的最佳控制。這樣可提高能量再生效率和燃油經濟性。液壓制動與再生制動協同控制示意如圖30所示。
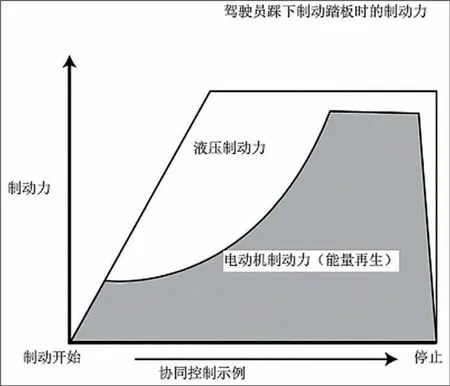
圖30 液壓制動與再生制動協同控制示意圖
(3)系統發生故障時,其使用非故障件繼續進行制動控制。同時,電控系統不工作時,通過踩下制動踏板在制動主缸內產生的制動液壓作為備用機構進行工作以確保制動力。
(4)ECB系統E/E架構如框圖31所示。
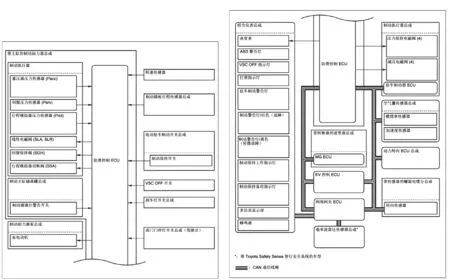
圖31 ECB系統E/E架構框圖
2.系統控制
(1)車輛穩定性控制(VSC)
車輛穩定性控制(VSC)是改善汽車行駛性能的一種控制系統,可大大降低交通事故并提高道路安全。它整合了防抱死制動(ABS)系統和牽引力控制(TRC)系統,有效提高防止汽車轉向時滑移、不穩定和側向駛出車道的綜合控制能力。
使用汽車轉向盤修正汽車前進方向并沿路線行駛,對于駕駛員來說并非難事。將是否能按駕駛員意圖行駛的性質用操縱性這一術語來表示;而所謂穩定性是描述當車輛受到來自路面的力或側風等干擾時,行駛波動是否較少、能否迅速回到平衡狀態的用語。如圖32所示,汽車操縱穩定性采用汽車基本運動的模型來研究。
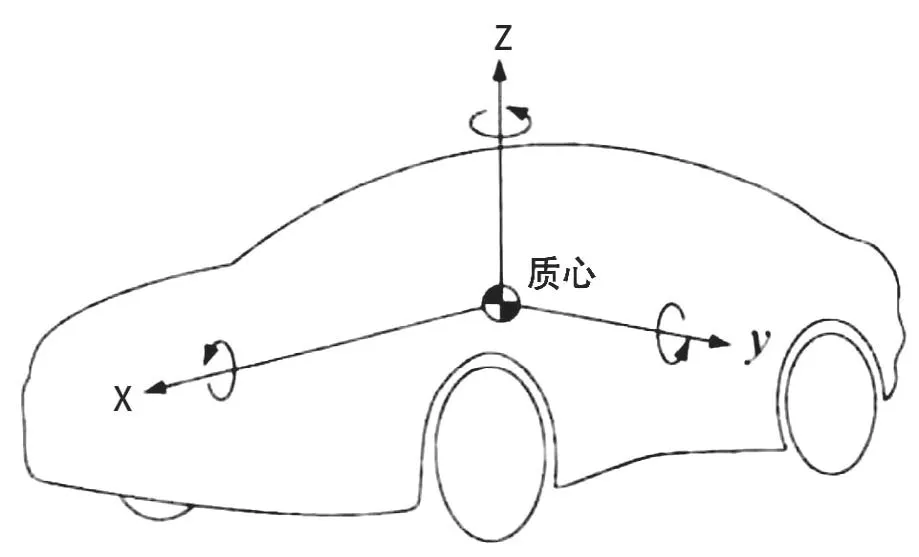
圖32 汽車基本運動模型
在圖32所示的汽車運動力學模型中,是一個前輪可操縱轉向、后輪剛性連接于車身的車輛。設車輪不具有質量并假定視為剛體的車身代表整車的質量;設此車質心為原點,車的前進方向為x軸,側向為y軸,垂向為z軸,并設想坐標系固定于車上;如果以此坐標系為基準,可將汽車的運動自由度作為空間的剛體運動而分為以下6個種類,如圖33所示。
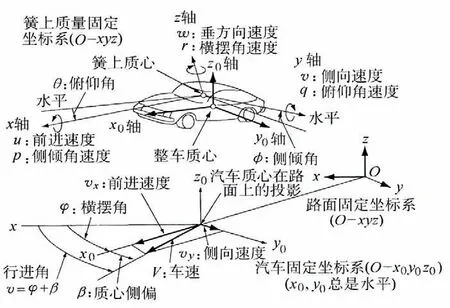
圖33 汽車運動自由度示意圖
①x方向的平移,前后運動(IongitudinalMotion)。
②y方向的平移,左右運動(IateralMotion)。
③z方向的平移,上下運動(Up and DownMotion)。
④繞x軸旋轉運動(Rolling Motion)。
⑤繞y軸旋轉運動(Pitching Motion)。
⑥繞z軸旋轉運動(Yawing Motion)。
若仔細地觀察上述6個運動,又可考慮分為下述兩大類:其中①③⑤的運動是與轉向盤輸入無直接關系的運動,①的運動是由加速踏板和制動引起的驅動與制動產生的前后方向的車輛直線運動;③的運動是由于道路顛簸產生的車輛上下跳動,它直接關系到車輛行駛的舒適性;⑤的運動是伴隨道路顛簸引起的車輛俯仰。而②⑥的運動基本上都是由于車輛行駛時轉向盤輸入而產生的運動,②的運動是由于轉向做輸入而引起的車輛的側向運動;⑥的運動是由于轉向盤輸入而使車輛方向發生變化的橫擺運動:還有伴隨著②⑥的運動而產生④的側偏運動。因此,所謂操縱穩定性研究對象的運動基本上可以說是由于轉向盤輸入而產生的②④⑥運動。
由于汽車行駛的真實工況十分復雜,如路面摩擦系數的變化,汽車的轉向、制動,汽車受到側向風干擾等,都可能引起汽車運動失穩。汽車的轉向運動時,由方向盤上施加轉角以后使前輪產生側偏角和側向力,引起汽車橫擺運動;汽車的橫擺運動導致后輪也產生側偏角,進而產生側向力。前、后輪的側向力提供了汽車轉向的向心力。
汽車在穩定行駛時,例如,高附著路面下轉向側向加速度較小時,輪胎側偏角較小,與輪胎側向力近似成線性關系,輪胎特性處于線性區內。在這種情況下汽車的質心側偏角也是很小的,接近于零,按照預期軌跡行駛。
當汽車發生失穩的情況時,例如進行緊急轉彎時,離心力變大,輪胎處于非線性區,側偏角和輪胎產生的側向力不再成線性關系,側向力逐漸飽和,路面又不能提供足夠的附著力,導致汽車失去控制,不再按照預期軌跡行駛。當前軸側向力飽和時,汽車出現不足轉向特性,前軸發生側滑,車輛出現飄移現象,車輛實際的轉彎半徑比駕駛員預期的要大,汽車偏離預期軌跡;當后軸側向力飽和時,汽車出現過度轉向特性,后軸發生側滑,產生激轉、側翻、甩尾等危險工況。
VSC系統作為一個閉環控制系統,當車輛在轉向、制動或打滑時,通過對制動力和驅動力的控制,針對每個車輪采取制動,精確控制車輪滑移率,就能最好的實現汽車在各種行駛工況下,甚至允許在物理極限范圍內,保證汽車在車道內穩定行駛。
圖34所示的兩種情況下,輪胎會超過其橫向附著力限制。車輛處于以下所示任一情況時,VSC通過控制電動機(電動汽車)輸出功率和各車輪的制動力來幫助維持車輛穩定性。
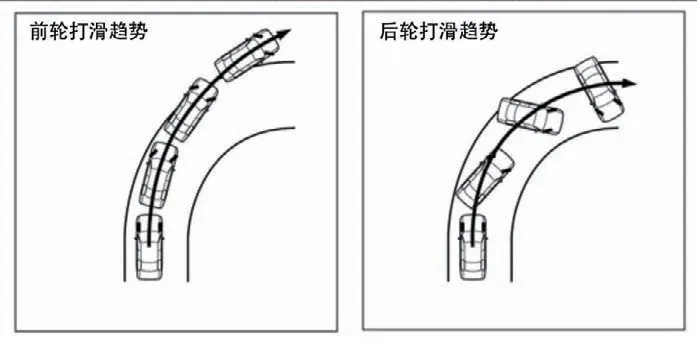
圖34 汽車車輪打滑的運動軌跡
為判定車輛狀況,傳感器檢測轉向角、車速、車輛橫擺率和車輛縱、側向加速度,然后由防滑控制ECU進行計算。
通過目標橫擺率和車輛實際橫擺率之間的差值判定車輛是否發生轉向不足。車輛的實際橫擺率小于應當產生的目標橫擺率(目標橫擺率由車速和轉向角判定),表示車輛正在以大于目標行駛軌跡的角度轉向。從而,防滑控制ECU判定有較大的轉向不足趨勢,如圖35所示。
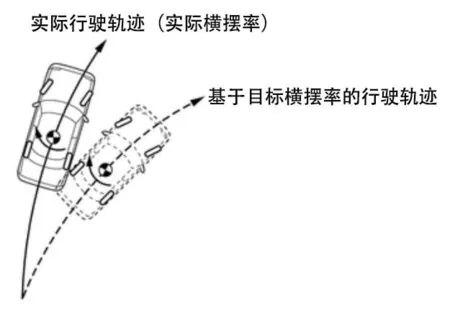
圖35 汽車轉向不足的運動軌跡
車輛是否處于后輪打滑狀態通過車輛打滑角度值和車輛打滑角速度(車輛打滑角度隨時間的變化)決定。車輛的打滑角度和打滑角速度均比較大時,防滑控制ECU確定車輛后輪打滑的趨勢較大,如圖36所示。
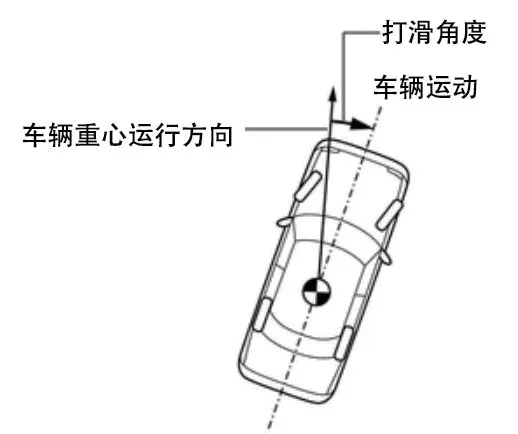
圖36 防滑控制ECU確定車輛后輪打滑的趨勢
防滑控制ECU判定車輛轉向不足或轉向過度時,會減小電動機輸出功率并對前輪或后輪施加制動以控制車輛的橫擺力矩。VSC功能的基本工作原理如下。然而,控制方法根據車輛特性和駕駛條件的不同而不同。
防滑控制ECU判定有較大的轉向不足趨勢時,根據趨勢的程度采取對策。防滑控制ECU控制電動機輸出功率,并對轉向時內側的前輪和后輪施加制動,以幫助抑制轉向不足趨勢。如圖37所示。
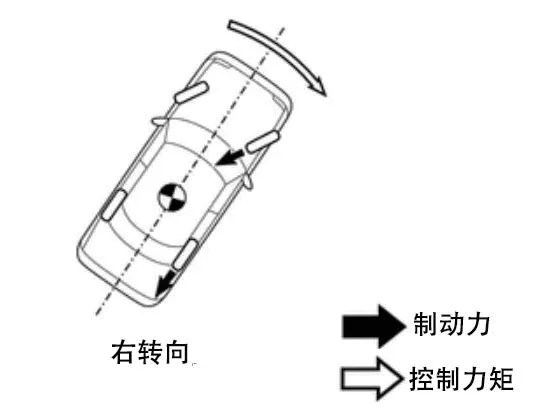
圖37 抑制轉向不足趨勢示意圖
防滑控制ECU判定有較大的轉向過度趨勢時,根據趨勢的程度采取對策。對轉向時外側的前輪和后輪施加制動,并在車輛上產生向外的慣性力矩以抑制轉向過度趨勢。除了通過制動力降低車速外,還能確保良好的車輛穩定性,如圖38所示。
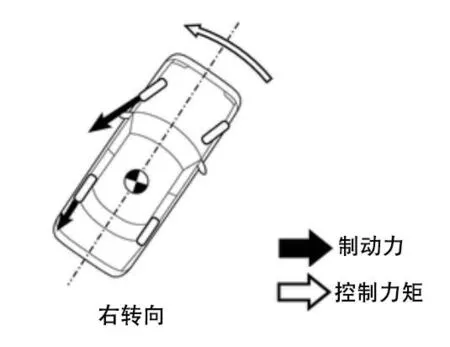
圖38 抑制轉向過度趨勢示意圖
⑵帶電動轉向(EPS)協同控制
①轉向協同控制集成了制動系統和動力轉向系統的控制以實現卓越的車輛穩定性和平穩控制。
②在組合摩擦道路上加速或制動時,或者車輛轉向不足或轉向過度時,轉向協同控制根據情況操作各系統并控制轉向輔助扭矩以促使駕駛員進行校正轉向。系統E/E架構如圖39所示。
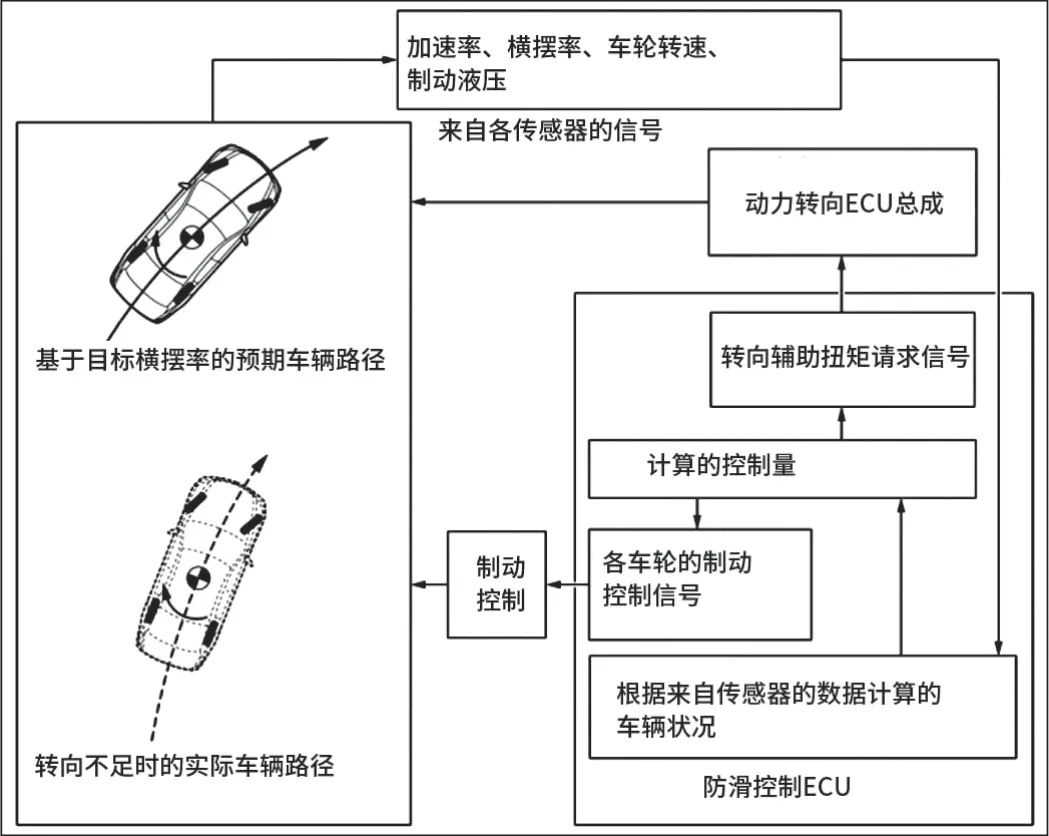
圖39 帶電動轉向(EPS)協同控制系統E/E架構
③組合摩擦道路上的加速控制(圖40),在組合摩擦道路上加速時(如左側車輪在瀝青上,右側車輪在雪上時),車輛容易向摩擦較小的一側偏轉。除常規TRC系統控制外,轉向協同控制控制轉向輔助扭矩以促使駕駛員進行校正轉向以抵消左右車輪驅動力差所產生的橫擺力矩。
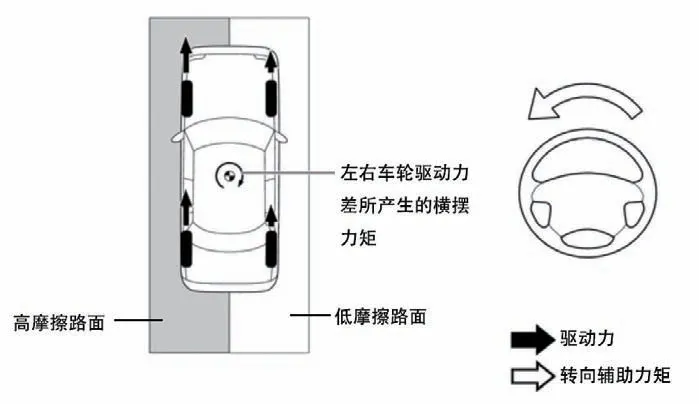
圖40 組合摩擦道路上的加速控制
④組合摩擦道路上的制動控制(圖41),在組合摩擦道路上進行制動時(如左側車輪在瀝青路面上,右側車輪在積雪路面上時),車輛容易向摩擦較大的一側偏轉。除常規ABS系統控制外,轉向協同控制控制轉向輔助扭矩以促使駕駛員進行校正轉向以抵消左右車輪制動力差所產生的橫擺力矩。
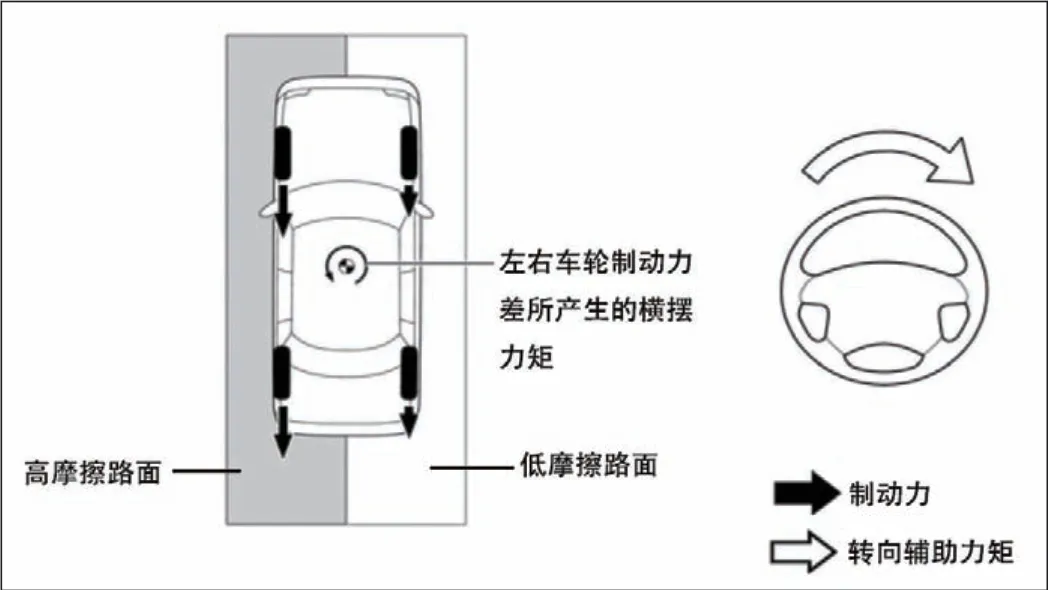
圖41 組合摩擦道路上的制動控制
⑤車輛轉向過度時的控制(圖42),為確定車輛是否轉向過度,車輛根據轉向角和車速對比目標橫擺率和實際橫擺率的打滑角度。如果判定車輛轉向過度,則車輛主要控制外側車輪的制動力以產生朝向轉彎外側的力矩,從而使過度轉向降至最低。此外,轉向協同控制控制轉向輔助扭矩以促使駕駛員進行校正轉向。
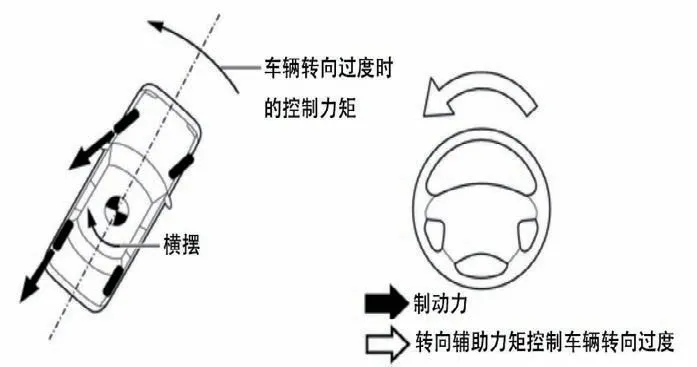
圖42 車輛轉向過度時的控制
⑥車輛轉向不足時的控制(圖43),為確定車輛是否轉向不足,車輛根據轉向角和車速對比目標橫擺率和實際橫擺率。如果判定車輛轉向不足,則車輛限制驅動力并控制各車輪的制動力以產生對準車輛及其目標路徑的力矩,從而使轉向不足降度轉動方向盤。
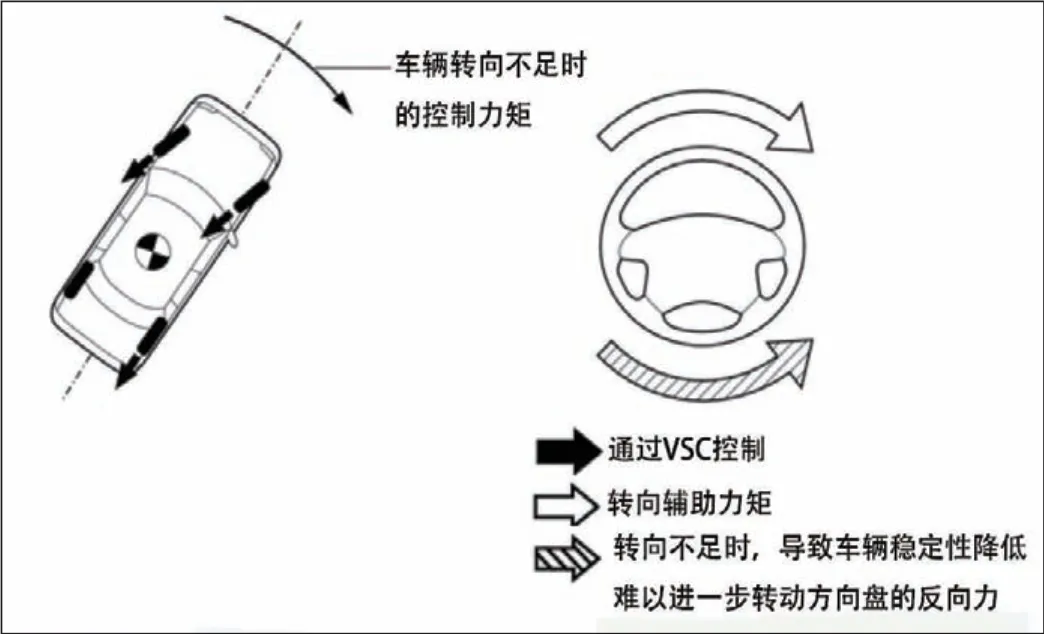
圖43 車輛轉向不足時的控制
⑶再生制動協同控制
①駕駛員踩下制動踏板時,防滑控制ECU根據制動調節器壓力和制動踏板行程計算所需總制動力。
②計算所需總制動力后,防滑控制ECU將再生制動力請求發送至EV控制ECU。EV控制ECU回復實際再生制動量(再生制動控制值)。
③EV控制ECU使用電動機產生負扭矩(減速力),從而執行再生制動。
④防滑控制ECU控制制動執行器電磁閥并產生輪缸壓力。產生的壓力是從所需總制動力中減去實際再生制動控制值后剩余的值。
⑤制動控制在圖44所示的不同車速下將制動力分配至液壓制動系統和再生制動系統。

圖44 不同車速下液壓制動與再生制動的分配
⑥再生制動協同控制E/E架構框如圖45所示。
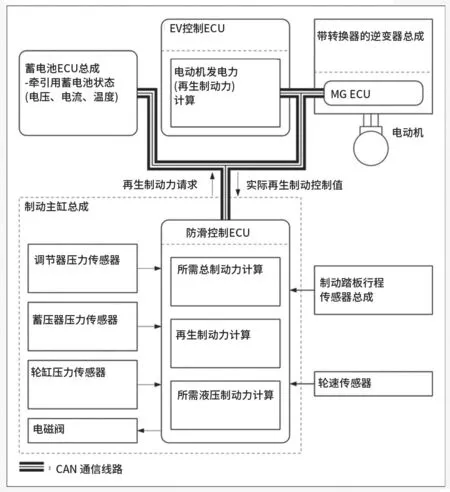
圖45 再生制動協同控制E/E架構框圖
3.ECB系統零部件功能與構造
ECB系統零部件功能如圖46所示。
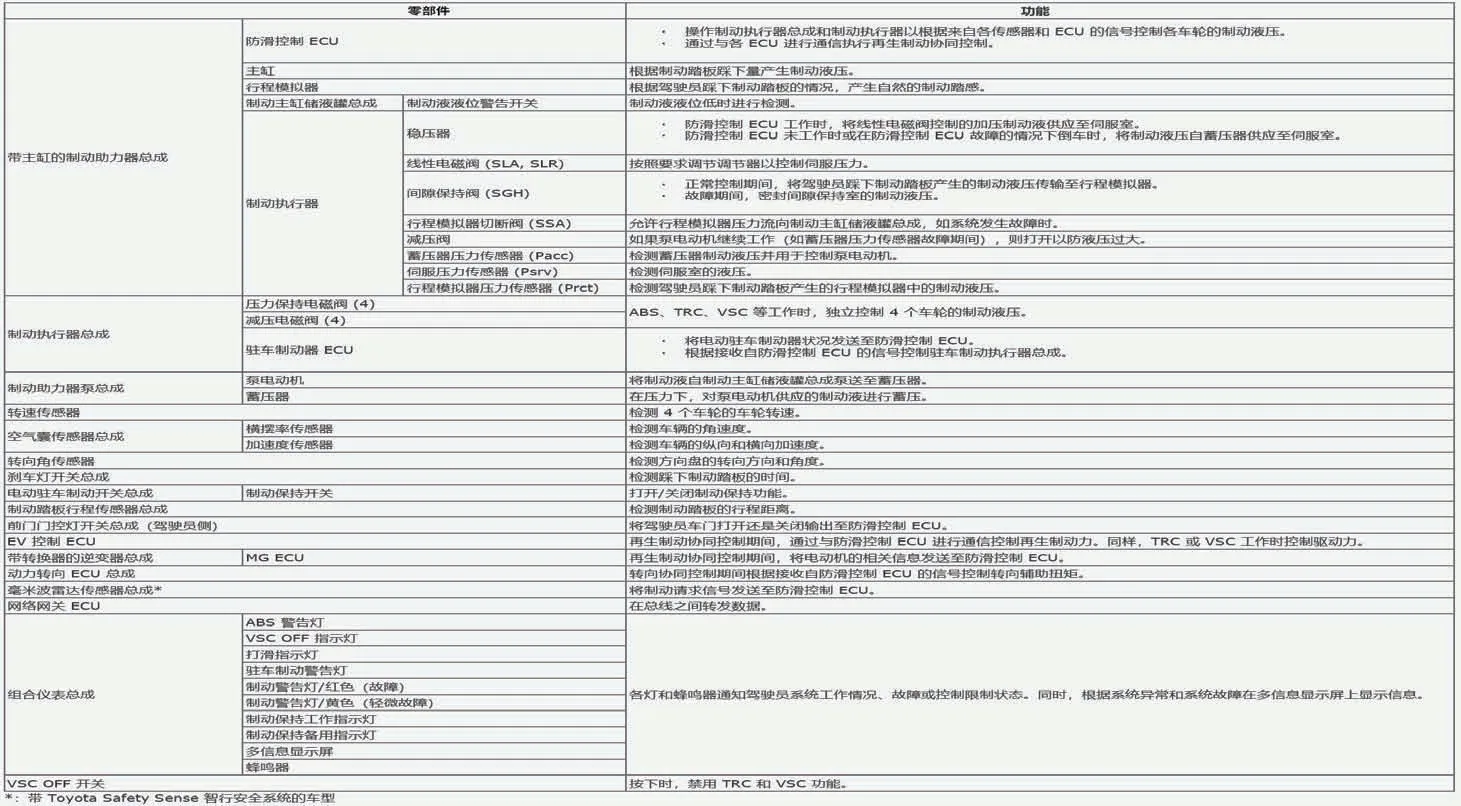
圖46 ECB系統零部件功能說明
(1)輪速傳感器
①采用主動式轉速傳感器。該傳感器包含傳感器集成電路。
②磁鐵型傳感器轉子由排列成圓形的N、S磁極構成,與輪轂軸承內座圈集成為一體。
③主動式轉速傳感器使用傳感器集成電路檢測傳感器轉子旋轉時產生的磁場變化,傳感器將檢測信息作為數字脈沖(車速信號)輸出至防滑控制ECU。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
汽車與安全(2019年9期)2019-11-22 09:48:03
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50