基于CFD 技術的隱身艦船波浪中橫搖運動研究
2022-10-19 10:43:04周天驕
艦船科學技術 2022年17期
周天驕
(中國船舶集團有限公司第七一三研究所,河南 鄭州 450015)
0 引 言
水面艦船對海上作戰有重要影響,對于水面艦船的防御手段也日益增加,因此對艦船的隱身性能提出了要求。隱身艦船通常采用內傾舷墻的船型設計,舭部與舷側折角形式連接,能夠有效地減少雷達的反射截面,降低被雷達探測的幾率。
在研制某搖擺試驗臺時,根據項目要求,將用于承載艦載武器裝備開展搖擺條件下的動態精度、可靠性以及高海清環境適應性試驗等,需能夠精確模擬艦船在波浪中縱搖和橫搖2 個自由度的搖擺運動。為研究艦船在波浪中的橫搖、縱搖運動,通常采用試驗水池的方法。為追求精確的試驗結果,對試驗者要求較高,且在模擬高海情艦船試驗極易對船模造成毀損。隨著計算機計算能力的提升,數值水池造波的應用越來越廣泛,目前已基本能夠模擬物理試驗水池的主要功能。
參數橫搖是當艦船航行于縱浪或接近縱浪,且所遭遇波浪波長與船長近似相等時,在短時間內出現大幅值的橫搖運動。與橫浪中的橫搖運動有著本質上的不同,出現參數橫搖的內部機理是,艦船與所遭遇波浪的相對位置隨著時間發生改變,導致水線面面積由于吃水變化引起的周期性變動,從而導致了回復力矩的波動。隱身艦船為實現良好的隱身效果,采用的內傾舷墻式設計同樣存在該隱患。目前國內外學者已經開始對艦船在迎浪中的大幅值橫搖開展研究。William N.France等提出引發參數橫搖的條件:船舶橫搖周期約為遭遇周期的2 倍、艦船航行于近似縱浪條件下。趙春慧通過進行參數橫搖模型試驗,得出結論:在試驗開始時刻,給船模初始橫向傾角,會縮短達到穩定參數橫搖所需時間,且不影響參數橫搖的穩定橫搖幅值。葛文澎采用粘性CFD 方法對集裝箱進行參數橫搖模擬,通過與切片法以及試驗數據的結果比對,驗證了利用CFD 方法進行參數橫搖模擬具有更高的精度。
為準確全面地分析隱身艦船在波浪中的橫搖運動,提出采用CFD 方法,通過構建數值水池,模擬隱身艦船在波浪中的橫搖運動以及甲板上浪對艦船運動的影響,為搖擺試驗臺的后續研究提供指導。
1 隱身艦船橫搖運動模型與數值模擬
1.1 數值方法
本文使用CFD 方法,對隱身艦船進行數值模擬,對艦船在迎浪中的大幅值橫搖運動及橫搖過程中出現的強非線性現象進行研究,對于粘性流體,需滿足連續性方程:
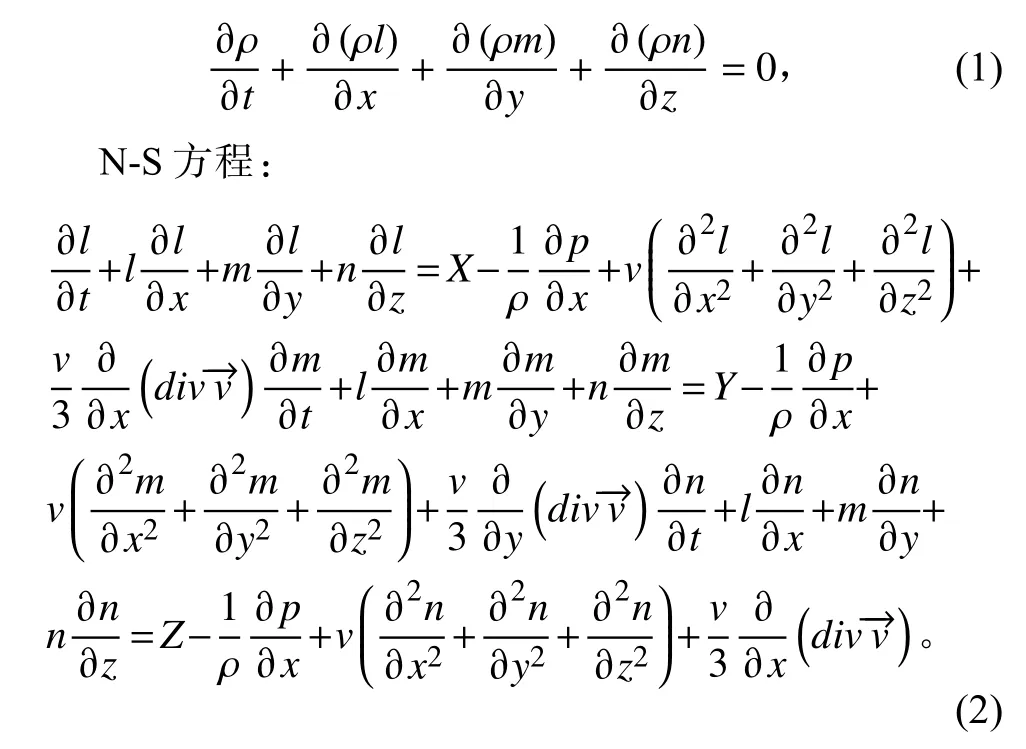
式中:為粘性流體的流體密度;,,為3 個相互垂直的速度分量;、、為3 個相互垂直的質量力;為壓力;為粘性系數;div 為散度。假設目標流體不可壓縮,即密度為定值,且忽略散度項,則式(1)和式(2)可改寫為:
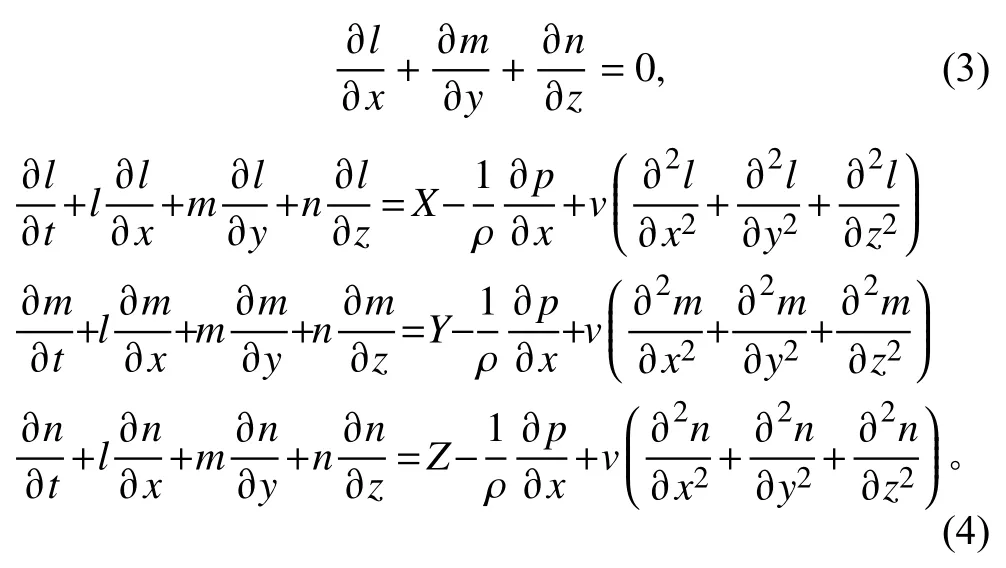
將式(4)簡寫為矢量形式:


1.2 研究對象
針對DTMB 5613 型隱身艦船進行數值模擬,該船型由美國海軍水面艦船研究中心提出,外觀近似于DDG1000 型內傾船,圖1 為DTMB 5613 型隱身艦船三維模型。
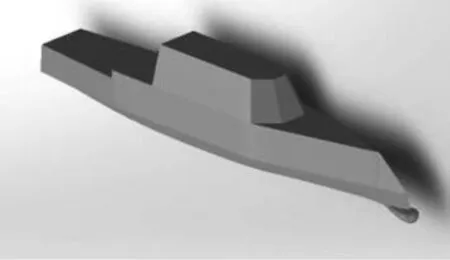
圖1 DTMB 5613 三維模型Fig.1 The 3D model of DTMB 5613
1.3 網格劃分與邊界條件
重疊網格基于動網格,在背景網格與重疊網格交界處采用插值計算,能夠參照船體的自由度進行運動,即重疊網格的部分區域與船體共同運動,理論上講任意方向、任意幅值的運動都能被精確捕捉,對大幅值運動的模擬有較好的精度,本文采用重疊網格對艦船的橫搖運動模擬,采用VOF 法對自由液面進行捕捉。
針對數值造波,在單個波長內保持不少于100 層網格,波高范圍內不少于12 層網格,時間步長設定為波浪周期的1/500,自由液面采用多體控制以實現網格尺寸過渡均勻,減小網格體積突變所產生的計算誤差,如圖2 所示。
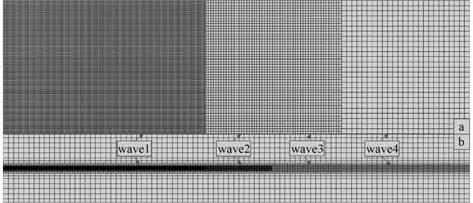
圖2 數值水池造波網格示意圖Fig.2 Schematic diagram of gridding to the numerical wave tank
全域數值模擬網格方案如圖3 所示。
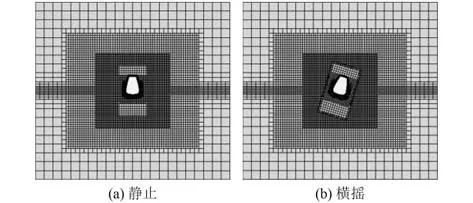
圖3 重疊網格Fig.3 Overlapping grid
數值模擬計算域尺寸設置為2 2 m×9 m×6 m(長×寬×高),船體部分設置為不可滑移壁面,入口截面、頂部、底部設置為速度入口,出口截面設置為壓力出口,左右兩側設置為對稱面。針對艦船橫搖運動存在的強非線性現象,選用-ε模型。
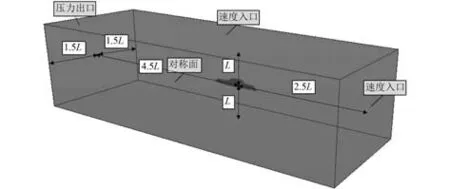
圖4 計算域與邊界條件示意圖Fig.4 Schematic diagram of computational domain and boundary conditions
2 計算結果分析
2.1 初始擾動對艦船橫搖的影響
根據國內外文獻研究以及數值模擬前期數據發現:艦船在確定工況下發生參數橫搖通常需要經歷數個橫搖周期,過長的發展時間對網格量大、時間步長小、迭代次數多的CFD 數值模擬非常不利。為了加速艦船達到穩定參數橫搖的進程,首先在初始時刻對艦船施加不同程度擾動,分析初始擾動對參數橫搖的影響。選取施加橫搖角速度作為初始擾動,統計達到參數橫搖穩定階段所需周期、最大幅值和穩定幅值,分析初始擾動對參數橫搖的影響。針對波陡0.04 的迎浪規則波,設定傅氏數F=0.15,在釋放船模時分別對船模施加0.05 rad/s 與0.5 rad/s 的初始橫搖角速度,時歷曲線對比如圖5 所示。
從表1 和圖5 可以看出,在施加0.05 rad/s 的初始橫搖角速度的情況下,經歷1 8 個周期,達到了18.49°的穩定橫搖幅值,其中最大橫搖幅值為20.68°,而施加了0.5 rad/s 的初始橫搖角速度后,僅經歷8 個橫搖周期,就達到了穩定橫搖階段,橫搖幅值為18.54°,其中最大橫搖幅值為20.11°。對比發現,施加0.05 rad/s 與0.5 rad/s 的橫搖角速度在參數橫搖線性穩定后無明顯差異,僅縮短了參數橫搖達到穩定所需時間,即初始擾動不影響參數橫搖的最終結果,后續為減少計算用時,均在初始時刻對船模施加0.5 rad/s 的橫搖角速度。
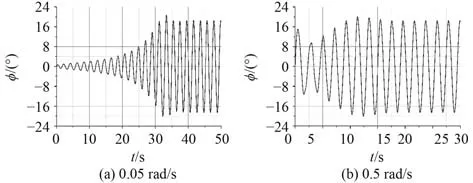
圖5 不同初始橫搖角速度參數橫搖時歷曲線圖Fig.5 Duration curve of different initial yaw velocity
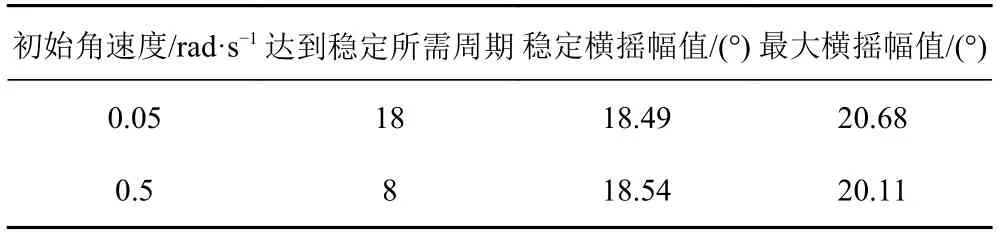
表1 不同初始擾動下參數橫搖數據統計Tab.1 Data statistics of parametric roll with different yaw velocity
2.2 航速對艦船橫搖的影響
艦船發生參數橫搖需滿足特定的遭遇頻率,當遭遇頻率接近2 倍艦船橫搖固有頻率時,存在發生參數橫搖的風險。在確定遭遇波長的情況下,通過色散關系可以確定遭遇頻率,計算公式如下:

式中:ω為波浪的自然頻率;為船舶航速;β為航行方向與遭遇波浪的夾角。
本文研究隱身艦船在迎浪中的橫搖,數值模擬選用迎浪規則波,即 β=180°,遭遇頻率只與航速有關。在規則波波長等于船長的條件下,針對4 個航速的試驗工況進行模擬。航速、傅氏數及遭遇頻率與橫搖固有頻率比值的對應關系見表2,得到的橫搖運動時歷如圖6 所示。
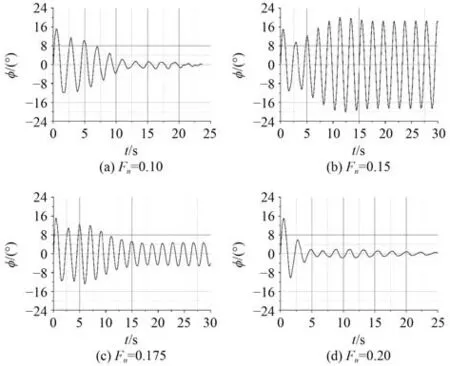
圖6 各航速下橫搖運動時歷曲線Fig.6 Duration curve of parametric roll with different yaw velocity
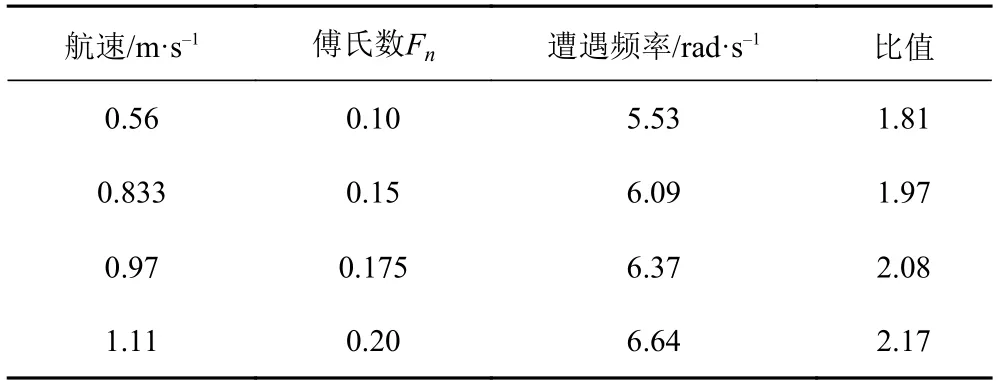
表2 迎浪時航速與傅氏數及遭遇頻率與橫搖固有頻率比值的對應關系Tab.2 Matchup of velocity and ratio of encounter frequency to inherent frequency
可以看出,在F=0.15時發生了明顯的參數橫搖現象,此時遭遇頻率與橫搖固有頻率的比值約為1.986,與其他存在參數橫搖隱患的船型相符,但當F=0.175,遭遇頻率與橫搖固有頻率的比值為2.077時,經過5 個周期的橫搖,并沒有發展為穩定的參數橫搖。由此可見,較于常規船型,隱身艦船發生參數橫搖的頻率區間較小。當F=0.10與F=0.20時,均未發生參數橫搖現象。
2.3 波陡對艦船橫搖的影響
波陡對參數橫搖的發生有重要影響。波高增加,會導致水線面面積變化加劇,由此復原力矩的周期性變化更加顯著;當波長近似等于船長時,船波相對位置變化導致的水線面面積變化最劇烈。選取傅氏數F=0.15,模擬波長等于1 倍船長,波陡為 0.01,0.02,0.03 和0.04 時,以及波陡為0.04,波長為0.9,1 和1.1 倍船長時的橫搖運動。計算得到的橫搖運動時歷如圖7 所示,相應的數據結果見表3。
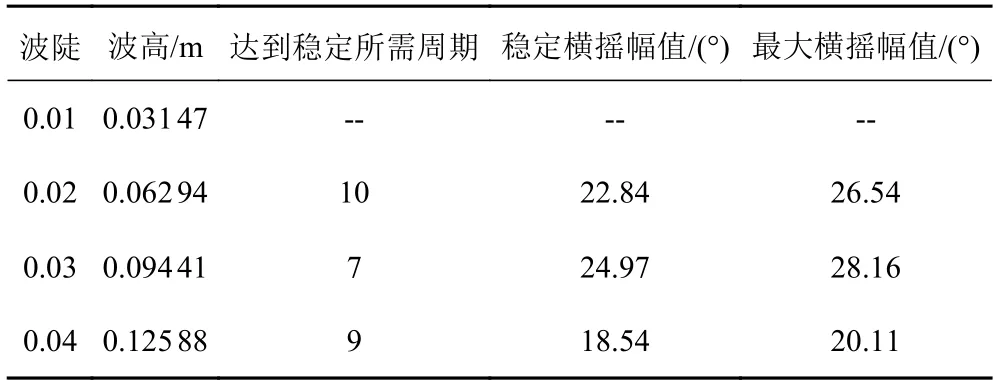
表3 各波高下橫搖模擬相關數據Tab.3 Data statistics of parametric roll with different wave height
由圖7 可知,在波長不變,僅改變波高的情況下,隱身艦船的橫搖運動:波陡S=0.01時未發生參數橫搖;波陡S=0.02時經歷10 個周期后達到了穩定橫搖階段,穩定幅值約為22.84°,最大幅值為26.54°;波陡S=0.03時內傾船經歷7 個周期達到穩定橫搖階段,穩定幅值約為24.97°,最大幅值為28.16°;波陡S=0.04時經歷8 個周期達到穩定的橫搖階段,穩定幅值約為18.54°,最大幅值為20.11°。可以看出,在波陡S處于0.01~0.03 階段,隨著波高的增加,艦船達到穩定橫搖所需周期逐漸減少,穩定的橫搖幅值與最大橫搖幅值均呈增加的趨勢,當波陡S處于0.03~0.04 時,則出現了波陡增加,達到穩定橫搖周期增加,穩定橫搖幅值與最大橫搖幅值減小的現象,這與其他存在參數橫搖隱患的船型試驗結論不同。在對波長不變,改變波高的情況進行討論后,對固定波陡S=0.04,改變波長的情況進行分析。
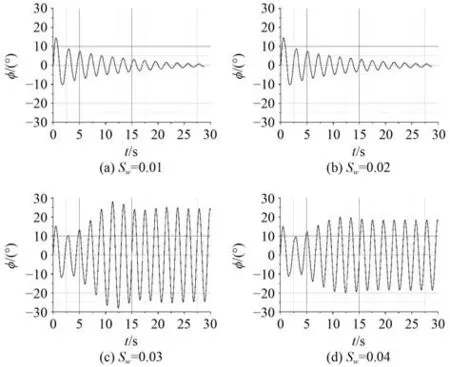
圖7 各波高下橫搖運動時歷曲線Fig.7 Duration curve of parametric roll with different wave height
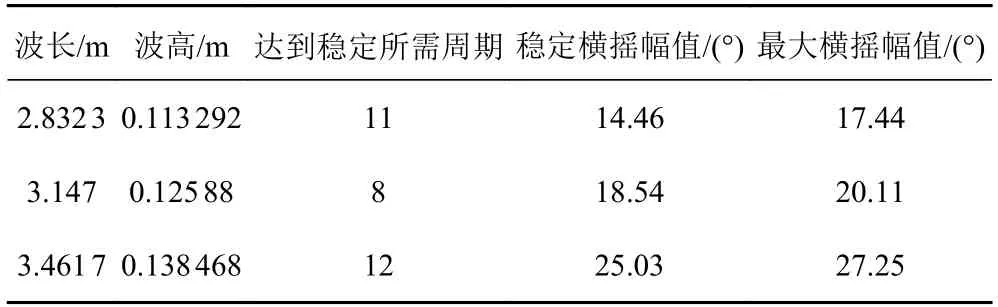
表4 各波長下橫搖模擬相關數據(波陡Sw=0.04)Tab.4 Data statistics of parametric roll with different wave length (Sw=0.04)
根據國內外學者對參數橫搖的研究,指出參數橫搖僅發生在波長船長比等于0.8~2.0 的情況下,圖8為固定波陡=0.04,波長λ=0.9及λ=1.1情況下隱身艦船的橫搖運動時歷曲線。其中波長等于1 倍船長的時歷曲線見圖7(d)。由圖可知,隱身艦船在波長近似等于船長的波浪區間均會發生參數橫搖現象,且在波長等于1 倍船長時,內傾船達到穩定橫搖用時最短。
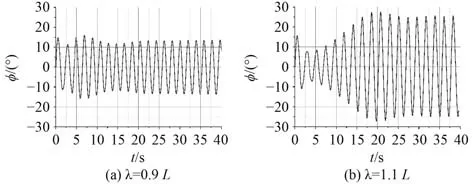
圖8 各波長下橫搖模運動時歷曲線Fig.8 Duration curve of parametric roll with different wave length
2.4 甲板上浪對艦船橫搖的影響
甲板上浪是因艦船與波浪之間的耦合作用而產生的一種非線性現象,尤其以迎浪中的上浪最為明顯。圖9 為隱身艦船在F=0.15,=0.04時的甲板上浪情況。

圖9 隱身艦船甲板上浪過程示意圖Fig.9 Schematic diagram of the process of green water
圖9 展示了DTMB 5 613 型隱身艦船航行于迎浪規則波中的上浪過程,由于隱身艦船向后傾斜的穿浪首,及采用低干舷、無舷墻的設計,極易產生爬浪。當艦船產生埋首時,大量水體涌上甲板,加劇了艦船的首部運動(見圖9(a));當船首抬升,上層建筑阻擋水體流動,會產生 “爬浪”現象(見圖9 (b));由于船首升高,爬升的水體向上的相對速度分量減小,部分水體順著上層建筑側壁離開船體(見圖9(c));部分水體殘留甲板,參與下一上浪過程(見圖9(d))。
甲板上浪不僅與航速相關,還與波長船長比有關,一般波長船長比在1~1.3 的情況下較容易出現甲板上浪。艦船發生參數橫搖時波長近似等于船長,且多發生于迎浪條件下,這也表明甲板上浪在隱身艦船發生參數橫搖時往往伴隨發生。
模擬結果顯示,波陡S=0.03的情況下,隱身艦船發生參數橫搖24.97°的穩定橫搖幅值,遠大于波陡為S=0.04時18.54°的穩定幅值,與現有集裝箱船等船型波陡與參數橫搖劇烈程度正相關的結論不一致。為研究此突變現象,對比波陡0.03 與0.04 的模擬場景發現,對應同一時刻,波陡0.04 的波浪條件下,發生了明顯的甲板上浪情況。如圖10 右系列所示,在發生參數橫搖時,甲板上浪導致甲板上存在相當體積的積水。而在波陡0.03 時,如圖10 左所示,則未發生甲板上浪。
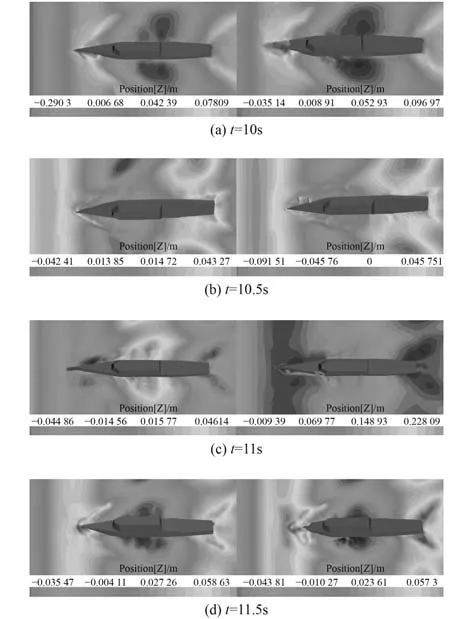
圖10 波陡0.03(左)與波陡0.04(右)甲板上浪對比Fig.10 Comparison between Sw=0.03 (Left) and Sw=0.04 (Right)
在此提出猜想:甲板上浪產生的積水一定程度上抑制了參數橫搖的發生。相當體積的積水改變了艦船的橫搖固有周期,使得在增加波陡后反而出現參數橫搖幅值減小的情況,且甲板上流動的積水給船體提供了部分回復力矩。為排除甲板上浪的影響,研究參數橫搖與波高的真實關系,設置舷墻以抑制甲板上浪。船模如圖11 所示。
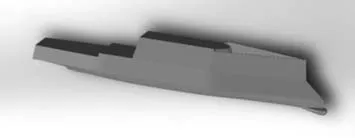
圖11 增加舷墻船模Fig.11 Hull model with balwark
設置與上層建筑平齊的舷墻,從而使得艦船在運動過程中,積水無法涌上甲板,從而不會對參數橫搖的模擬起到影響。設置舷墻后運動情況如圖12 所示,所得橫搖時歷如圖13 所示。
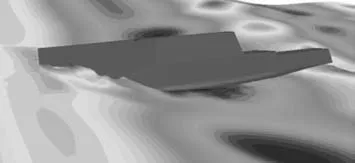
圖12 設置舷墻運動情況Fig.12 Motion of hull with balwark
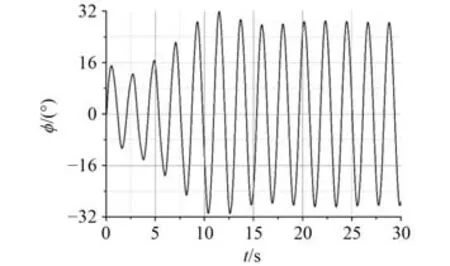
圖13 設置舷墻后參數橫搖運動時歷曲線Fig.13 Duration curve of parametric roll with balwark
舷墻將波浪與甲板完全隔離開來,排除甲板上浪情況后,艦船經過7 個周期形成穩定的參數橫搖運動,最大幅值達31.87°,穩定階段幅值為28.45°,如表5 所示。
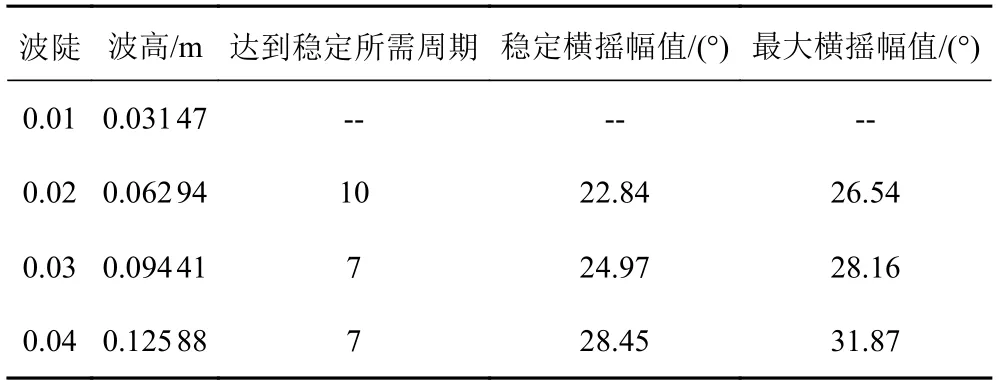
表5 排除甲板上浪影響后系列波高下參數橫搖數據Tab.5 Data statistics of parametric roll with different wave height overlook green water
當排除甲板上浪影響后可以得出:隨著波高增加,隱身艦船達到橫搖穩定階段所需周期逐漸減少,達到的橫搖最大幅值與穩定幅值都有所增加,且需在波陡達到某一臨界值時才會發生參數橫搖,與其他存在參數橫搖隱患船型結論一致。
隱身艦船由于采用低干舷、無舷墻以及向后傾斜的穿浪首設計,在迎浪大波陡情況下極易出現爬浪導致甲板積水,相當體積甲板積水起到部分減搖水艙的作用,增加船舶橫搖阻尼,改變船舶橫搖固有周期,使得在大波陡(開始產生爬浪)情況下,出現波陡增加,參數橫搖穩定幅值下降的情況。
3 結 語
本文針對DTMB 5613 型隱身艦船,研究艦船在波浪中的運動及甲板上浪對艦船運動的影響,建立波浪數值水池,模擬了隱身艦船在迎浪規則波下大幅值橫搖,即參數橫搖運動的發生,分析初始擾動、航速、波陡以及甲板上浪對參數橫搖的影響。結果表明,隱身艦船在迎浪規則波下存在發生大幅值橫搖,即參數橫搖的可能,且橫搖幅值達到28.16°,伴隨參數橫搖現象,往往會有甲板上浪的發生,且對參數橫搖有一定的抑制作用。通過以上分析,證明利用CFD 方法可以對艦船在波浪中的大幅值、強非線性運動進行較為準確的模擬,對后續艦船運動研究起到一定指導作用。