水下無人航行器空間運動建模與操縱性仿真預報
2022-10-19 10:43:08常開應王慶云沈鵬臧斌
艦船科學技術 2022年17期
關鍵詞:模型
常開應,王慶云,沈鵬,臧斌
(1.昆明海威機電技術研究所(有限公司),云南 昆明 650217;2.國家深海基地管理中心,山東 青島 266237)
0 引 言
水下無人航行器(UUV)是海洋資源開發、海洋環境監測及海洋生態保護等的關鍵裝備之一。近年來,隨著人類對深海資源開發的不斷深入,UUV 由于在軍事與科研方面有重要應用,引起了廣泛關注,研究價值和意義也日益凸顯。
操縱性能是UUV 總體性能的主要指標之一,直接影響著航行器執行作業任務的能力,在航行器初步設計和運動控制參數選取時,操縱性能的預報尤為重要。建立合理的空間運動數學模型是研究UUV 操縱性及控制系統設計的基礎,王波、趙金鑫等參考潛艇操縱性研究的方法搭建了非線性的UUV 空間運動數學模型進行了仿真預報,段斐等針對REMUS 模型中的推力(力矩)和舵力(力矩)難于獲取等問題,提出了一種修正的REMUS 模型并完成了航行器的運動仿真預報。戴君銳等采用六自由度模型完成了UUV操縱運動仿真,并與K-T 模型的仿真結果進行了對比。徐得志等參考艦船操縱性理論研究方法,采用四階龍格-庫塔算法對UUV 垂向操縱運動進行了研究。聶為彪等建立了UUV 水平面內的動力學方程,應用Matlab 編程對研究對象的水平面操縱運動進行了預報。
本文基于水下航行力學基本原理,參考魚雷操縱性基本理論,在小沖角、小側滑角、小機動運動條件下導出了UUV 六自由度空間運動的線性數學模型,并搭建了操縱運動仿真預報平臺,對某型UUV 單平面典型操縱運動特性進行仿真預報,為UUV 水動力布局和控制系統的設計提供一定的技術指導與理論支撐。
1 UUV 空間運動數學模型
1.1 基本假設
1)UUV 是剛體,并關于 平面對稱;
2)流體是無粘不可壓縮的;
3)流體為無界流場,在航行體運動之前是靜止的;
4)坐標原點與UUV 浮心重合;
5)不考慮地球的自轉和地球的曲率,近似認為地面坐標系為慣性坐標系。
1.2 坐標系選擇與運動學參數
采用如圖1 所示坐標系,包括地面坐標系EXYZ和航行體坐標系。地面坐標系與大地相連,航行體坐標系與UUV 相連,坐標原點與UUV 浮心重合。

圖1 水下無人航行器坐標系Fig.1 Coordinate system of underwater unmanned vehicle



運動參數包括:
1)UUV 在地面坐標系中的位置(X,Y,Z)和姿態角(φ,ψ,θ);
2)航行體坐標系下的UUV 速度(v,v,v)和角速度(ω,ω,ω);
3)UUV 速度和速度的流體動力角 α,β關系如下式:

1.3 運動學方程
根據UUV 速度在地面坐標系和航行體坐標系下的轉換關系,可得平動運動學方程:


由UUV 旋轉角在地面坐標系和航行體坐標系下的關系,可得轉動運動學方程:

1.4 動力學方程
根據動量定理和動量矩定理,可以得到UUV 在無流界中的動力學運動方程,并通過系列的推導,可表示為矩陣形式:

式中:



2 UUV 操縱運動仿真平臺搭建
搭建操縱性仿真預報平臺,該平臺將航行體空間運動數學模型分為姿態角模型、速度轉化模型、粘性流體動力模型、靜水力模型、其他力模型、坐標系轉換模型等。
仿真預報過程中采用變步長四階-五階Runge-Kutta 算法,輸入UUV 基本參數及水動力參數,并賦予初始速度、推力和舵角,運行程序后便可輸出對應時刻UUV 的姿態角、位置、速度等,生成對應曲線圖,即可對UUV 的操縱性能進行預報。

表1 UUV 總體參數Tab.1 The parameters of underwater unmanned vehicle
3 UUV 操縱運動仿真預報
3.1 水平面運動仿真
3.1.1 回轉運動預報
給定推力值=95.96 N,對應設計航速4 kn,初始速度=2 m/s,并分別操垂直舵 δ=10°,15°,20°,其浮心的運動軌跡詳如圖2 所示,結果如表2 所示。
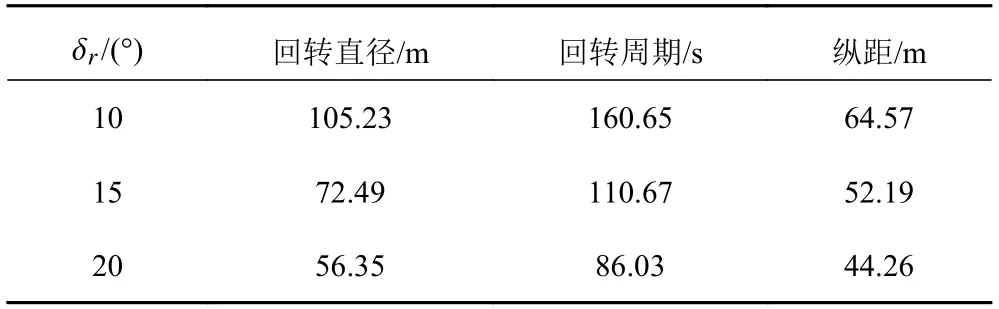
表2 UUV 回轉運動特征參數Tab.2 Rotary motion characteristic parameters of underwater unmanned vehicle

圖2 航速4 kn 時,不同舵角的回轉曲線Fig.2 Rotation curve of different rudder angles at 4 kn
可以看出,在設計航速為4 kn 下,舵角越大,回轉直徑、回轉周期和縱距越小。在操大舵角20°時,回轉直徑為56.3 m,約為航行體長(7 m)的8 倍,可以看出該UUV 具有較高的水平面回轉性能。
3.1.2 水平面Z 形操舵預報
給定推力值,初始速度,對應航速分別為4 kn和8 kn 下,對于 δ/ψ=15/15進行Z 型操舵運動,反復操舵4 次,其偏航角 ψ 和舵角 δ隨時間的變化軌跡如圖3 所示。由此得到UUV 的初轉期t、超越時間、超越偏航角 ψ、全周期T等特征參數,便可評估UUV 水平面航向改變性能。
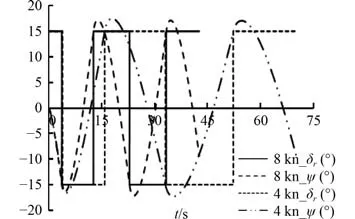
圖3 不同航速下,偏航角 ψ 和舵角 δr隨時間的變化曲線Fig.3 Curves of yaw angle ψand rudder angle δr with the change of time at different speeds
從表3 可以看出,航速8 kn 時,UUV 的初轉期t、超越時間、超越偏航角 ψ、全周期T均比低航速4 kn 時小。此外,還可以看出,該UUV 具備良好的應舵性和操縱性,響應時間快。

表3 UUV Z 形操舵運動特征參數Tab.3 Z-shape motion characteristic parameters of underwater unmanned vehicle
3.2 垂直面運動仿真
3.2.1 垂直面T 形操舵預報
給定推力值,初始速度,對應航速分別為4 kn和8 kn 下,操升降舵 δ=15,UUV 的俯仰角 θ和深度Y等都在改變,當俯仰角達到設定俯仰角10°時,立即回舵到初始狀態,當俯仰角速度為0 時,θ達到穩定值,UUV 穩定在一個新的航向上。升降舵 δ、俯仰角θ、航行深度Y隨時間的變化軌跡如圖4 所示。

圖4 不同航速下,升降舵 δe、俯仰角 θ、航行深度Ye隨時間的變化曲線Fig.4 Curves of elevator δe、pitchθ and depth Y e with the change of time at diff erent speeds
從表4 兩個響應航速結果可以看出,航速越大,UUV 的初轉期t越小,說明UUV 的應舵更快,轉首性好,下潛快,但同時超越俯仰角 θ和越深度 ξ也越大。此外,從圖4 可以看出,航速越大,航行器穩定在新的航向上的時間也越長。

表4 UUV T 形操舵運動特征參數Tab.4 T-shape motion characteristic parameters of underwater unmanned vehicle
3.2.2 垂直面純下潛預報
給定推力值T,初始速度,在設計航速4 kn 下,分別操橫舵 δ= 15°,10°進行下潛,其俯仰角 θ和深度Y隨時間的變化軌跡如圖5 所示。

圖5 航速4 kn 時,俯仰角 θ、航行深度 Ye 隨時間的變化曲線Fig.5 Curves of pitchθ and depth Y e with the change of time at 4 kn
從圖5 可以看出,在同一航速為4 kn 下,操橫舵角越大,UUV 轉首性越好,下潛得也越快,但對應穩定后的俯仰角也越大,符合UUV 的實際操縱運動特性。
4 結 語
本文基于水下航行力學基本原理,參考魚雷操縱性基本理論,導出了UUV 六自由度空間運動線性數學模型,并搭建了操縱運動仿真預報平臺,采用變步長四階-五階龍格-庫塔(Runge-Kutta)算法,對某型UUV 的水平面回轉、Z 形操舵運動以及垂直面T 形操舵、純下潛等運動進行了仿真預報。仿真結果表明,該UUV 具備良好的應舵性和操縱性能,響應時間較快,能真實地反映研究對象的操縱運動特性,其結果可為UUV 水動力布局和控制系統的設計提供一定的技術指導與理論支撐。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19