典型艦船供電系統(tǒng)數(shù)學(xué)建模研究
2022-10-19 10:43:12胡偉浩郭俊文
艦船科學(xué)技術(shù) 2022年17期
胡偉浩,郭俊文
(中國艦船研究設(shè)計中心,湖北 武漢 430064)
0 引 言
艦船供電系統(tǒng)是艦船電力系統(tǒng)的重要組成部分。典型供電系統(tǒng)的數(shù)學(xué)模型用于模擬發(fā)電機(jī)組運(yùn)行的物理過程,從而用于供電系統(tǒng)仿真和驗證。結(jié)合虛擬現(xiàn)實技術(shù),數(shù)學(xué)模型可用于電力系統(tǒng)相關(guān)的模擬訓(xùn)練。
1 概 述
1.1 供電系統(tǒng)組成
艦船供電系統(tǒng)一般包括汽輪發(fā)電機(jī)組和柴油發(fā)電機(jī)組。柴油發(fā)電機(jī)組主要由柴油機(jī)及其調(diào)速系統(tǒng),同步發(fā)電機(jī)及其勵磁系統(tǒng)組成。汽輪發(fā)電機(jī)組主要由汽輪機(jī)及其調(diào)速系統(tǒng),同步發(fā)電機(jī)及其勵磁系統(tǒng)組成,如圖1 所示。本文以柴油機(jī)、汽輪機(jī)、同步發(fā)電機(jī)及勵磁系統(tǒng)為研究對象,開展供電系統(tǒng)數(shù)學(xué)建模分析。
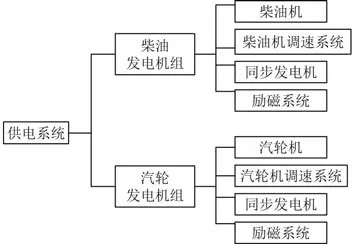
圖1 艦船供電系統(tǒng)組成Fig.1 Composition of ship power supply system
柴油機(jī)和汽輪機(jī)向同步發(fā)電機(jī)輸出給定轉(zhuǎn)速,達(dá)到動能轉(zhuǎn)換為電能的目的。同步發(fā)電機(jī)是一種最常用的交流發(fā)電機(jī)。由于同步發(fā)電機(jī)一般采用直流勵磁,當(dāng)其單機(jī)獨立運(yùn)行時,通過調(diào)節(jié)勵磁電流能方便的調(diào)節(jié)發(fā)電機(jī)的電壓。勵磁系統(tǒng)用于維持發(fā)電機(jī)端電壓在給定值,當(dāng)發(fā)電機(jī)負(fù)荷發(fā)生變化時,通過勵磁電流調(diào)節(jié)磁場的強(qiáng)弱來恒定發(fā)電機(jī)端的電壓。
1.2 基本假設(shè)
在建立供電系統(tǒng)數(shù)學(xué)模型時,需作如下假設(shè):
1)選取發(fā)電機(jī)原動機(jī)模型輸出的穩(wěn)態(tài)值作為下一級的輸入;
2)發(fā)電機(jī)組的啟動和停機(jī)特性曲線,按照一階段慣性方程模擬;
3)為便于表達(dá),在不影響模塊間邏輯關(guān)系的前提下,對數(shù)學(xué)模型傳遞函數(shù)進(jìn)行近似和簡化。
2 柴油發(fā)電機(jī)組模型
2.1 組成
柴油發(fā)電機(jī)組由柴油機(jī)及其調(diào)速器、執(zhí)行器、同步發(fā)電機(jī)及其勵磁調(diào)壓系統(tǒng)組成。
2.2 柴油機(jī)調(diào)速系統(tǒng)模型
模型輸入:給定轉(zhuǎn)速,機(jī)組轉(zhuǎn)差率。
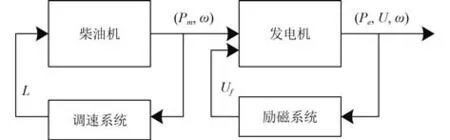
圖2 柴油發(fā)電機(jī)模塊Fig.2 Diesel generator set modules
模型輸出:調(diào)整后的轉(zhuǎn)速。
參數(shù):執(zhí)行器常數(shù)、PID 控制器的比例、積分、微分系數(shù)。
關(guān)系模型:船舶電力系統(tǒng)的調(diào)速系統(tǒng)分為速度控制器、執(zhí)行機(jī)構(gòu)、原動機(jī)(柴油機(jī))、轉(zhuǎn)速反饋環(huán)節(jié)、發(fā)電機(jī)等重要部分,形成一個閉環(huán)控制系統(tǒng),其框圖如圖所示。
速度控制器采用經(jīng)典的PID 控制器,其傳遞函數(shù)模型為:
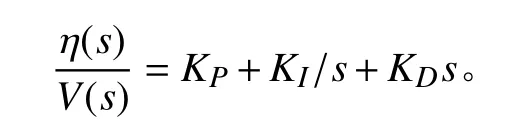
式中:為機(jī)組轉(zhuǎn)差率;η為由滑環(huán)行程確定的位置相對偏差;為復(fù)變量;K ,K ,K分別為PID 控制器的比例、積分、微分系數(shù)。
執(zhí)行機(jī)構(gòu)是柴油機(jī)電子調(diào)速器實現(xiàn)對柴油機(jī)控制的最終手段。因為執(zhí)行器的階躍響應(yīng)和一階慣性環(huán)節(jié)的階躍響應(yīng)類似,因此可以采用階躍響應(yīng)實驗法來建立一階慣性環(huán)節(jié)的數(shù)學(xué)模型,其傳遞函數(shù)為:
式中:μ為伺服活塞相對位移。
式中:,,X分別為活塞位置的實時值、初始值和額定值;為執(zhí)行器常數(shù);β為反饋系數(shù)。
轉(zhuǎn)速反饋環(huán)節(jié)主要是由轉(zhuǎn)速傳感器和信號轉(zhuǎn)換電路組成的,工作過程是將轉(zhuǎn)速傳感器獲得的頻率信號轉(zhuǎn)換為方波脈沖信號,根據(jù)2 個脈沖之間的時間間隔來測量速度,它的輸入量是柴油機(jī)的轉(zhuǎn)速,輸出量是與轉(zhuǎn)速度正比例的電壓信號,定義它的增益為,傳遞函數(shù)可看作比例環(huán)節(jié)。因此()=。
2.3 柴油機(jī)模型
模型輸入:伺服活塞的相對位移μ。
模型輸出:機(jī)組轉(zhuǎn)差率。
參數(shù):機(jī)組的平衡旋轉(zhuǎn)慣量、轉(zhuǎn)子角速度初始值、活塞位置處于額定值時的轉(zhuǎn)矩、原動機(jī)自調(diào)整系數(shù)。
關(guān)系模型:柴油機(jī)復(fù)頻域下的傳遞函數(shù)為
式中:
式中:為機(jī)組的平衡旋轉(zhuǎn)慣量;ω為轉(zhuǎn)子角速度初始值;M為活塞位置處于額定值時的轉(zhuǎn)矩;β為柴油機(jī)自調(diào)整系數(shù)。
為簡化計算,柴油機(jī)組并網(wǎng)后只選取上述模型計算結(jié)果的穩(wěn)態(tài)值作為后續(xù)模型的計算值。柴油發(fā)電機(jī)組模型模擬柴油機(jī)組起動特性曲線的變化趨勢。
3 汽輪發(fā)電機(jī)組模型
3.1 組成
汽輪發(fā)電機(jī)組由汽輪機(jī)及其調(diào)速器、執(zhí)行器、同步發(fā)電機(jī)及其勵磁調(diào)壓系統(tǒng)組成。

圖3 柴油機(jī)及其調(diào)速系統(tǒng)的結(jié)構(gòu)框圖Fig.3 Diesel generator and speed regulation modules
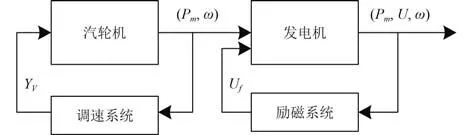
圖4 汽輪發(fā)電機(jī)模塊Fig.4 Turbo generator set modules
3.2 汽輪機(jī)調(diào)速系統(tǒng)模型
汽輪機(jī)調(diào)速模型以蒸汽流量閥門開度為控制目標(biāo)。按照PID 閉環(huán)控制原理開展建模。
模型輸入:電磁功率參考,設(shè)定速度,實際速度。
模型輸出:閥門開度。
參數(shù):放大倍數(shù)、固態(tài)轉(zhuǎn)速、閥門開度速度限制、閥門開度限制。
關(guān)系模型如圖5 所示。
速度調(diào)節(jié)系統(tǒng)為液壓調(diào)節(jié),包括一個比例積分環(huán)節(jié)、一個速度延遲環(huán)節(jié)和一個伺服機(jī)構(gòu)控制閥門開度。
圖5 中:Pref為電磁功率參考,這是一個符合電機(jī)初始有功功率的常數(shù)。wref 為設(shè)定速度。為實際速度。為放大倍數(shù),如果使用氣流反饋回路則設(shè)置放大倍數(shù),否則設(shè)為1。為固態(tài)轉(zhuǎn)速。Dead Zone 為死區(qū)參數(shù)。Servo-motor speed limits 為閥門開度速度限制。Servo-motor position 為閥門開度限制。
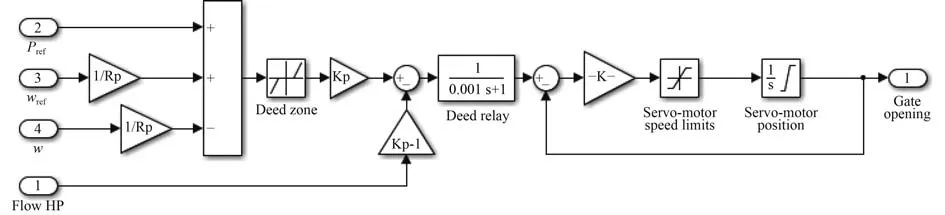
圖5 汽輪機(jī)速度調(diào)節(jié) Matlab 模型Fig.5 Matlab model for turbo generator of speed regulation
汽輪機(jī)組并網(wǎng)后只選取上述模型計算結(jié)果的穩(wěn)態(tài)值作為后續(xù)模型的計算值。汽輪發(fā)電機(jī)組選取上述模型的汽輪機(jī)組起動特性曲線的變化趨勢來模擬。
3.3 汽輪發(fā)電機(jī)組模型
模型輸入:蒸汽閥門開度與主汽壓力。
模型輸出:機(jī)械功率。
參數(shù):高壓缸功率所占比例、中壓缸功率所占比例、低壓缸功率所占比例、高壓缸功率自然過調(diào)系數(shù)、高壓缸蒸汽容積時間常數(shù)、再熱蒸汽容積時間常數(shù)、低壓連通管容積時間常數(shù)。
關(guān)系模型:汽輪機(jī)模型如圖6 所示。

圖6 汽輪機(jī)發(fā)電機(jī)組模型框圖Fig.6 Model of turbo generator set
其中,F(xiàn)HP為 高壓缸功率所占比例,F(xiàn)IP為中壓缸功率所占比例,F(xiàn)LP為低壓缸功率所占比例,F(xiàn)HP+FIP+FLP=1。λ為高壓缸功率自然過調(diào)系數(shù)。高壓蒸汽容積傳遞函數(shù)為:

式中:T為高壓缸蒸汽容積時間常數(shù)。
再熱蒸汽容積傳遞函數(shù)為:
式中:T為再熱蒸汽容積時間常數(shù)。
低壓連通管容積傳遞函數(shù)為:

式中:T為低壓連通管容積時間常數(shù)。
4 同步發(fā)電機(jī)及勵磁系統(tǒng)模型
4.1 同步發(fā)電機(jī)模型
同步發(fā)電機(jī)即轉(zhuǎn)子轉(zhuǎn)速與定子旋轉(zhuǎn)磁場的轉(zhuǎn)速相同的交流發(fā)電機(jī)。
模型輸入:電機(jī)軸瞬態(tài)電動勢,為電機(jī)軸超瞬態(tài)電動勢,為電機(jī)軸超瞬態(tài)電動勢。
模型輸出:發(fā)電機(jī)軸電壓、發(fā)電機(jī)軸電壓。
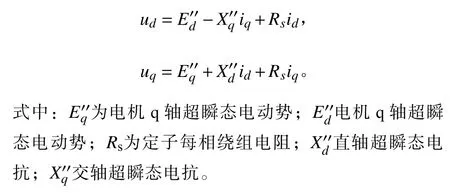
參數(shù):軸超瞬態(tài)電動勢、軸超瞬態(tài)電動勢、定子每相繞組電阻、直軸超瞬態(tài)電抗、交軸超瞬態(tài)電抗、直軸瞬態(tài)開路時間常數(shù)、直軸同步電抗、直軸瞬態(tài)電抗、直軸超瞬態(tài)短路時間常數(shù)、直軸同步電抗、直軸瞬態(tài)電抗、交軸超瞬態(tài)短路時間常數(shù)。
關(guān)系模型:建立同步發(fā)電機(jī)五階實用模型。
1)定子電壓方程
2)轉(zhuǎn)子繞組電壓方程
3)轉(zhuǎn)子繞組電壓方程


4)轉(zhuǎn)子繞組電壓方程


5)轉(zhuǎn)子運(yùn)動方程

其中:T為原動機(jī)加于電機(jī)軸的機(jī)械力矩;慣性時間常數(shù)T的物理意義為當(dāng)機(jī)組從零起升速時,若加速力矩恒為1(p.u.),則轉(zhuǎn)子達(dá)額定轉(zhuǎn)速ω=1(p.u.)所需的時間為(s)。
另有:
進(jìn)一步推導(dǎo)可得:
4.2 勵磁系統(tǒng)模型
發(fā)電機(jī)組通常采用無刷勵磁系統(tǒng),勵磁系統(tǒng)常用自并勵勵磁系統(tǒng)的PID 控制模型。在自并勵勵磁系統(tǒng)中選擇一級的超前-滯后補(bǔ)償器完全可以滿足勵磁系統(tǒng)的各項性能指標(biāo)。
模型輸入:給定電壓、勵磁電壓初值、發(fā)電機(jī)軸電壓、發(fā)電機(jī)軸電壓、接地電壓。
模型輸出:勵磁電壓。
參數(shù):勵磁機(jī)時間常數(shù)、勵磁機(jī)增益系數(shù)。
關(guān)系模型:勵磁調(diào)壓裝置的主要任務(wù)時根據(jù)發(fā)電機(jī)不同運(yùn)行工況向同步發(fā)電機(jī)提供一個可調(diào)的勵磁電流,以保證同步發(fā)電機(jī)的輸出電壓為額定值。本模型針對無刷同步發(fā)電機(jī)勵磁調(diào)壓系統(tǒng),其結(jié)構(gòu)原理框圖如圖7所示。

圖7 勵磁系統(tǒng)模型框圖Fig.7 Model of excitation system
勵磁系統(tǒng)輸入電壓的測取方式見圖8。

圖8 勵磁系統(tǒng)電壓輸入模型Fig.8 Model of excitation system input
即輸入電壓為

放大單元傳遞函數(shù)為一階慣性環(huán)節(jié):
簡化的勵磁機(jī)輸出數(shù)學(xué)模型可用一階慣性環(huán)節(jié)表示如下式:

式中:T為勵磁機(jī)時間常數(shù);k為勵磁機(jī)增益常數(shù)。
反饋單元傳遞函數(shù)為:
式中:k為阻尼反饋環(huán)節(jié)增益系數(shù);T阻尼反饋環(huán)節(jié)時間常數(shù)。
5 模型驗證
選取某型16V 船用柴油機(jī)參數(shù)作為輸入,對柴油發(fā)電機(jī)組輸出的穩(wěn)態(tài)值進(jìn)行分析。
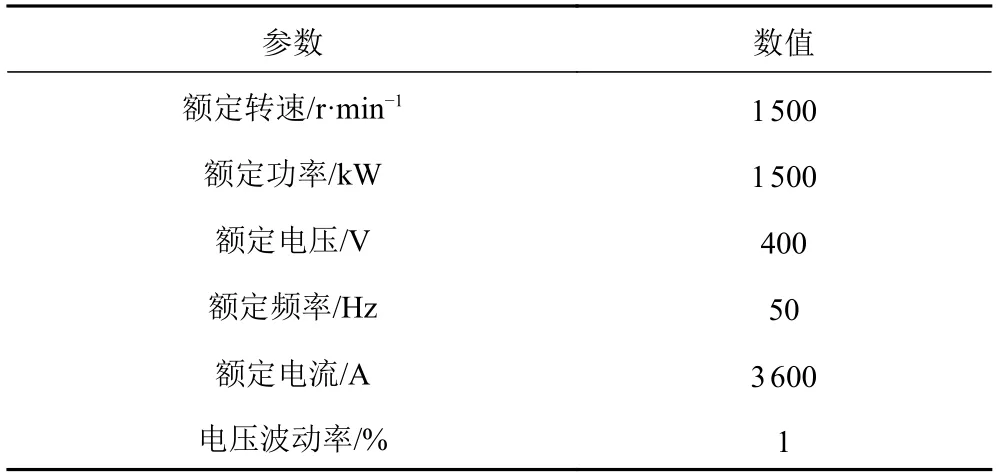
表1 某船用柴油機(jī)基本參數(shù)Tab.1 The parameters of marine diesel engine
按照某柴油機(jī)起動特性曲線,柴油機(jī)從起動到達(dá)穩(wěn)態(tài)額定轉(zhuǎn)速1 500 r/min 的時間不大于9 s。柴油發(fā)電機(jī)組起動時間為機(jī)組從按下按鈕至首次達(dá)到穩(wěn)態(tài)額定電壓400 V 的時間,不大于10 s;
采用本柴油發(fā)電機(jī)組模型,柴油機(jī)備車達(dá)到穩(wěn)態(tài)額定轉(zhuǎn)速時間為 10±1s,發(fā)電機(jī)組起動達(dá)到穩(wěn)態(tài)額定功率時間為 10±1s。起動成功后,發(fā)電機(jī)組的電壓、頻率、轉(zhuǎn)速達(dá)到理論值:電壓 400±10% V,頻率 50±5% Hz,轉(zhuǎn)速 1 500±5% r/min。
6 結(jié) 語
在分析發(fā)電機(jī)組閉環(huán)控制模型的基礎(chǔ)上,通過簡化模型結(jié)構(gòu)、特性曲線擬合的優(yōu)化方式,形成了一整套純數(shù)學(xué)模型表達(dá)。通過測試表明,當(dāng)前數(shù)學(xué)模型可以基本反映發(fā)電機(jī)組輸出的基本變化趨勢以及穩(wěn)態(tài)值。作為仿真模型,可用于驅(qū)動以供電系統(tǒng)啟停、調(diào)速等操作為科目的模擬訓(xùn)練系統(tǒng)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
大電機(jī)技術(shù)(2017年3期)2017-06-05 09:36:02
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
軍事文摘(2016年16期)2016-09-13 06:15:49